Jurnal Meteorologi Klimatologi dan Geofisika Vol... No...Desember 2016
PROTOTIPE SISTEM PERINGATAN DINI TAIL WIND DAN CROSS
WIND
TAIL WIND AND CROSS WIND ALERT SYSTEM PROTOTYPE
SorfianSekolah Tinggi Meteorologi Klimatologi dan Geofisika, Jakarta Badan Meteorologi Klimatologi dan Geofisika, Jakarta
Email : [email protected]
Abstrak
Salah satu fenomena alam yang berbahaya dalam aktivitas penerbangan adalah
wind shear yakni perubahan arah dan kecepatan angin secara tiba-tiba dan dalam waktu
yang singkat pada runway. Komponen tail wind dan cross wind pada fenomena wind shear sangat berbahaya dalam proses take-off dan landing pesawat terbang, sehingga membutuhkan instrumen yang dapat mendeteksi keberadaan tail wind dan cross wind serta memberikan informasi kepada pilot melalui unit ATS. Rancangan instrumen pendeteksi komponen wind shear tersebut terdiri dari dua anemometer digital yang dipasang pada kedua ujung runway. Anemometer digital akan mendeteksi arah dan kecepatan angin dengan memanfaatkan beberapa pasang sensor infrared sebagai pemancar dan photodiode sebagai penerima sinyal analog yang biasa disebut optocoupler. Sinyal-sinyal analog ini selanjutnya diubah menjadi sinyal digital oleh ADC (Analog to Digital Converter) mikrokontroler kemudian dikonversi menjadi arah dan kecepatan angin melalui algoritma pemrograman mikrokontroler. Arah dan kecepatan angin dari masing-masing anemometer dikirim ke display PC (Personal Computer) dan proses perhitungan secara otomatis dilakukan melalui aplikasi yang akan dibangun sehingga dapat menampilkan informasi arah dan kecepatan angin dari masing-masing anemometer secara real time dan mampu memberikan warning apabila sewaktu-waktu terjadi tail wind atau cross wind pada masing-masing ujung runway.
Kata kunci: wind shear, tail wind, cross wind, anemometer, optocoupler, warning,
runway
Abstract
One of the dangerous natural phenomena in flight activity is wind shear that changes wind speed and direction suddenly and in a short time on the runway. Tail wind and cross wind components are on a very dangerous phenomenon of wind shear in the process of take-off and landing aircraft, thus requiring an instrument that can detect the presence of tail wind and cross wind and provide information to pilots by ATS units. The design of wind shear detection instrument consists of two digital anemometer mounted on both ends of the runway. Digital anemometer will detect wind direction and speed by utilizing several pairs of infrared sensors as a transmitter and a photodiode as the receiver analog signals commonly called optocoupler. The analog signals are then converted into
Jurnal Meteorologi Klimatologi dan Geofisika Vol... No...Desember 2016
digital signals by the ADC (Analog to Digital Converter) microcontroller is then converted to wind direction and speed via microcontroller programming algorithms. Wind direction and speed of each anemometer is sent to the display PC (Personal Computer) and the calculation process is automatically done through applications to be built so that it can display information wind direction and speed of each anemometer in real time and is able to give a warning if at -time occur tail wind or cross wind at each end of the runway.
Keywords: wind shear, tail wind, cross wind, anemometer, optocoupler, warning, runway
1. PENDAHULUAN
Wind shear merupakan sebuah
fenomena alam yang sangat mengerikan dan menjadi musuh yang tidak terlihat baik oleh mata para penerbang maupun pengamat khususnya tail wind dan cross
wind. Wind shear merupakan peristiwa
perubahan arah dan kecepatan angin secara tiba-tiba dan dalam waktu yang singkat. Pada aerodromes dimana wind
shear dianggap menjadi faktor penting,
perlu untuk membuat pengaturan kondisi
wind shear dalam informasi tambahan
lokal rutin seperti special reports yang menyediakan peringatan wind shear secara spesifik, yang akan memberikan peringatan pada unit ATC (Air Traffic
Control) dan melalui para pilot, keberadaan atau eksistensi yang dimungkinkan oleh fenomena berbahaya ini dapat ditanggulangi.
Unsur angin relatif tidak linier karena waktunya tidak dapat diprediksi sehingga observasi dan alert system untuk parameter ini sangatlah diperlukan
khususnya untuk keselamatan
penerbangan. Baik observasi maupun sistem peringatan dini wind shear adalah merupakan tanggungjawab dari BMKG
(Badan Meteorologi Klimatologi
Geofisika) dimana peristiwa tail wind dan
cross wind yang terjadi telah ditetapkan
sebagai penyebab atau faktor utama penyumbang dalam sejumlah kecelakaan pesawat yang mengakibatkan pesawat gagal landing maupun take-off. Kasus
yang terjadi pada pesawat Boeing MD-82 di Bandara Adi Soemarmo, Solo, Jawa Tengah, 30 November 2004, yang menewaskan 23 penumpang, diduga disebabkan oleh wind shear sehingga mengakibatkan pesawat gagal landing dengan sempurna dan yang terbaru kecelakaan pesawat Boeing 737-800 Lion Air rute Bandung-Denpasar di perairan dekat Bandara Ngurah Rai, Denpasar, 13 April 2013, juga diduga disebabkan
microburst. Fenomena wind shear
dianggap berbahaya bagi keselamatan penerbangan jika terjadi perubahan kecepatan angin di atas 15 knot baik tail
wind maupun crosswind.
2. PERANCANGAN SISTEM
Prototipe Sistem Peringatan Dini
Tail Wind dan Cross Wind memiliki tiga
bagian utama yaitu perangkat keras, jalur komunikasi serta perangkat lunak yang akan digunakan. Pada bab ini penulis akan menjelaskan mengenai prinsip kerja Prototipe Sistem Peringatan Dini Tail
Wind dan Cross Wind melalui blok
diagram sistem secara keseluruhan, rangkaian dan flow chart Prototipe Sistem Peringatan Dini Tail Wind dan
Cross Wind serta diagram alir sensor
3
2.1 Blok diagram Alat
Prototipe Sistem Peringatan Dini
Tail Wind dan Cross Wind ini terdiri dari
sensor photodioda, mikrokontroler, RTC
(Real Time Clock), modul sd card sebagai
media penyimpanan data serta telemetri sebagai jalur komunikasi menuju display pada PC seperti pada blok diagram dibawah ini:
Gambar 2.1 Blok diagram Prototipe Sistem Peringatan Dini Tail W
4
2.4 Implementasi Sistem
Implementasi sistem merupakan tahap akhir dari perancangan keseluruhan sistem yang dibangun mulai dari perancangan hardware prototipe hingga pembuatan interface program untuk membaca data dari prototipe sistem peringatan dini tail wind dan cross wind. Berikut gambar hardware dari sistem yang telah selesai dibangun serta diintegrasikan.
Gambar 2.4 Perangkat Keras Prototipe Sistem Peringatan Dini Tailwind &
Crosswind
Berikut merupakan hasil program interface yang dibuat berbasiskan visual studio dengan metode real time transceiver untuk menampilkan data dari hardware melalui komunikasi nirkabel:
Gambar 2.5 Rancangan Tampilan
Prototipe Sistem Peringatan Dini
Tailwind & Crosswind
Aplikasi tampilan pada prototipe ini dirancang melalui Visual Studio yang akan menampilkan informasi arah dan kecepatan angin pada masing-masing
runway secara kontinyu kemudian
memproses data arah dan kecepatan angin yang diterima dari mikrokontroler dengan menghitung nilai tail wind dan
cross wind sehingga apabila nilai tail wind dan cross wind diatas 15 knot maka
aplikasi akan menampilkan warning yang berupa tampilan tulisan dan suara dan akan dikirimkan ke antarmuka pengguna yang berada di ATCT (Air Traffic Control
Tower).
3. PENGUJIAN DAN PEMBAHASAN Pengujian alat menggunakan metode perbandingan dengan alat standar dengan tujuan untuk mengetahui kedekatan nilai keluaran dari sensor pada sistem ini dengan alat standar kalibrasi. Metode komparasi dilakukan agar dapat mengetahui apakah sensor pada sistem ini layak atau tidak digunakan untuk
membantu pengamatan cuaca di
lapangan.
3.1 Pengujian Sensor Wind Speed
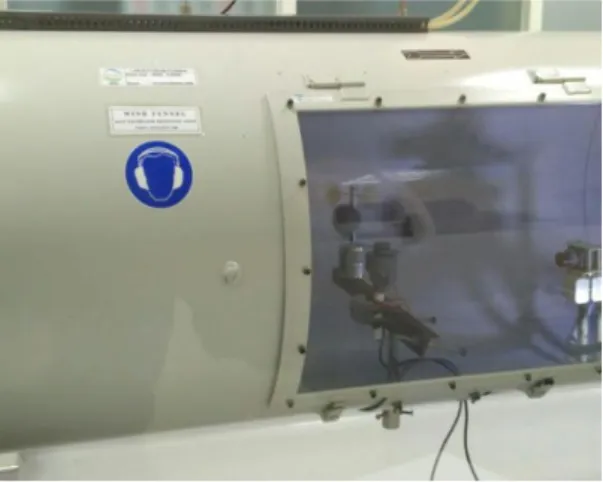
Pengujian sensor kecepatan angin dilakukan pada masing-masing sensor
dengan cara memasukkan sensor
kecepatan angin ke dalam wind tunnel bersamaan dengan sensor dari alat standar wind speed. Menggunakan set poin 2, 3, 4, 5, 6 dan 7 m/s. Pembacaan berulang dilakukan untuk setiap set poin hingga beberapa sampel.
Gambar 3.1 Proses Pengujian Sensor
Kecepatan Angin Anemometer 25
5
3.2 Pengujian Sensor Arah Angin
Pengujian sensor arah angin pada masing-masing anemometer dilakukan dengan cara manual, yaitu melakukan koreksi pada keluaran dari sensor berupa sudut arah angin sesuai dengan alat pengukur sudut yang memiliki resolusi sebesar 1 derajat. Proses pengujian sensor arah angin menggunakan 30 set poin karena alat pada sistem mampu membaca arah angin hanya sebanyak 30 kali posisi. Gambar 4.3 adalah proses ujicoba pengambilan data arah angin untuk anemometer 7 dan anemometer 25 pada sistem.
Gambar 3.2 Proses Pengujian Sensor Arah Angin Anemometer 25
3.3 Hasil Korelasi
Perbandingan data dari
pembacaan sensor kecepatan angin menghasilkan standar deviasi 0,0817. Nilai rata-rata koreksi pembacaan pada semua set poin adalah 2,35. Sensor kecepatan angin untuk anemometer 7 memiliki nilai treshold 2,10 m/s.
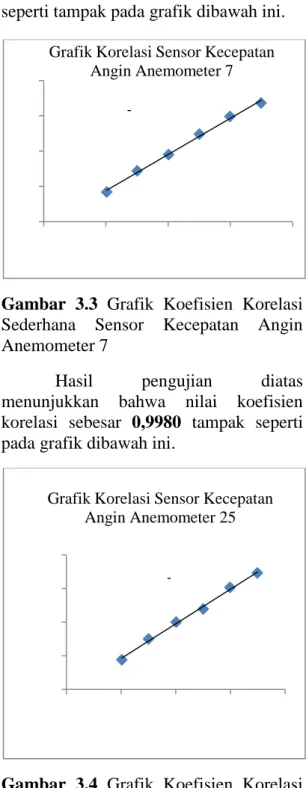
Hasil pengujian diatas
menunjukkan bahwa nilai koefisien
korelasi sederhana adalah sebesar 0,9980 seperti tampak pada grafik dibawah ini.
Gambar 3.3 Grafik Koefisien Korelasi Sederhana Sensor Kecepatan Angin Anemometer 7
Hasil pengujian diatas
menunjukkan bahwa nilai koefisien korelasi sebesar 0,9980 tampak seperti pada grafik dibawah ini.
Gambar 3.4 Grafik Koefisien Korelasi Sederhana Sensor Kecepatan Angin Anemometer 25
Gambar 3.5 dibawah ini
menunjukkan bahwa nilai koefisien korelasi sederhana untuk sensor arah angin anemometer 7 dan anemometer 25 adalah sebesar 0,999. y = 0.5125x - 0.1438 R² = 0.9962 0 1 2 3 4 0 2 4 6 8 Sen sor 7 (m /s) STANDAR (m/s)
Grafik Korelasi Sensor Kecepatan Angin Anemometer 7 y = 0.5148x - 0.1107 R² = 0.9959 0 1 2 3 4 0 2 4 6 8 Se n sor 25(m /s) STANDAR (m/s) Grafik Korelasi Sensor Kecepatan
6
Gambar 3.5 Grafik Korelasi Sensor Arah Angin Anemometer 7 dan 25 dengan Alat Standar
3.3 Pembahasan
Setelah melalui proses validasi data di atas, maka diperoleh data kecepatan angin yang cukup baik karena memiliki nilai koefisien korelasi sederhana yang hampir mendekati 1, yaitu sebesar 0,9980. Data arah angin yang sangat baik dengan nilai koefisien korelasi sederhana sebesar 0,999 namun resolusi masih tergolong rendah, yaitu sebesar 12º.
Dari data tersebut menghasilkan beberapa analisa sebagai berikut:
1. Nilai tail wind akan semakin mendekati nilai kecepatan angin sesungguhnya yang terukur pada sensor apabila arah angin semakin mendekati sudut runway yaitu pada sudut 72º dan 252º.
2. Nilai cross wind akan semakin mendekati nilai kecepatan angin sesungguhnya yang terukur pada sensor apabila arah angin semakin membentuk sudut tegak lurus
dengan arah runway yaitu pada sudut 156º, 168º, 336º dan 348º. 3. Seharusnya nilai tail wind yang
paling tinggi apabila arah angin
datang dari 70º karena
anemometer 7 yang artinya diletakkan di sisi runway 70º dari arah utara. Namun dari data di atas, maka nilai tail wind yang paling tinggi pada anemometer 7 yaitu apabila sensor arah angin berada pada posisi 72º sebesar 3,46 m/s.
4. Seharusnya nilai tail wind yang paling tinggi apabila arah angin
datang dari 250º karena
anemometer 25 yang artinya diletakkan di sisi runway 250º dari arah utara. Namun dari data di atas, maka nilai tail wind yang paling tinggi pada anemometer 25 yaitu apabila sensor arah angin berada pada posisi 252º sebesar 3,46 m/s.
5. Seharusnya nilai cross wind yang paling tinggi apabila arah angin datang dari arah 160º dan 340º karena berada tepat tegak lurus terhadap arah runway. Namun dari hasil validasi data di atas, maka nilai cross wind yang paling tinggi pada anemometer 7 dan 25 yaitu apabila sensor arah angin berada pada posisi 156º, 168º, 336º dan 348º yaitu sebesar 3,44 m/s.
4. KESIMPULAN
Berdasarkan hasil analisa dalam penelitian ini dapat disimpulkan bahwa:
1. Sistem peringatan dini wind shear
tail wind dan cross wind yang
akan dibangun terdiri dari dua buah anemometer digital yang menggunakan sensor optocoupler
dimana masing-masing anemometer mempunyai kemampuan melakukan y = 1.0008x - 5.1351 R² = 0.9989 -100 0 100 200 300 400 0 100 200 300 400 Se n sor 7 d an S e n sor 25 (º) STANDAR (º) Korelasi Data Alat Standar Dengan Sensor Arah Angin Anemometer 07 dan Anemometer
7
pengukuran arah dan kecepatan angin serta mendeteksi adanya keberadaan komponen wind shear seperti tail wind dan cross wind. 2. Sensor kecepatan angin pada
anemometer 7 memiliki nilai hasil koefisien korelasi sederhana sebesar 0,9980.
3. Sensor kecepatan angin pada anemometer 25 memiliki nilai hasil koefisien korelasi sederhana sebesar 0,9980.
4. Nilai koefisien korelasi sederhana
untuk sensor arah angin
anemometer 7 dan anemometer 25 adalah sebesar 0,999.
5. Nilai keluaran dari sensor
kecepatan angin memiliki
treshold yang cukup tinggi yaitu
1,85 m/s dan 2,10 m/s.
6. Nilai keluaran dari sensor arah angin memiliki resolusi yang cukup besar yaitu sebesar 12º. 7. Nilai tail wind terbesar jika sudut
arah angin yang terukur pada sensor adalah 72º dan 252º.
8. Nilai cross wind terbesar jika sudut arah angin yang terukur pada sensor adalah 156º, 168º, 336º dan 348º.
DAFTAR PUSTAKA
ICAO, (2011), Doc 8896 - Manual of
Aeronautical Meteorological Practice, Ninth Edition.
ICAO, (2007), Annex 3 - Meteorological
Service for International Air Navigation, Sixteenth Edition.
As’ari, 2011, Rancang Bangun
Anemometer Analog, Universitas Sam Ratulangi, Manado.
Azlina, Maya dkk, 2013, Pembuatan Alat
Ukur Kecepatan Angin dan
Penunjuk Arah Angin Berbasis Mikrokontroler AT-Mega 8535,
Universitas Sumatera Utara(USU), Sumatera Utara.
G. Hallowell, Robert dkk, 2010,
Wind-Shear System Cost-Benefit Analysis, Wheather Sensing Group,
Amerika Serikat.
L. Golding, Wayne, 2015, Low-Level
Windshear and Its Impact on Airlines, Embry-Riddle Aeronautical University, Amerika Serikat.
Wijayanti, Dewi, 2015, Rancang Bangun Alat Ukur Kecepatan dan Arah Angin Berbasis Arduino Uno AT-Mega 328, Universitas Negeri Surabaya(UNESA), Surabaya. World Meteorogical Organization, Guide
To Meteorogical Instruments and Methods of Observation, (2008)