02.03.1
Chapter 02.03
Differentiation of Discrete Functions
After reading this chapter, you should be able to:
1. find approximate values of the first derivative of functions that are given at discrete data points, and
2. use Lagrange polynomial interpolation to find derivatives of discrete functions.
To find the derivatives of functions that are given at discrete points, several methods are available. Although these methods are mainly used when the data is spaced unequally, they can be used for data that is spaced equally as well.
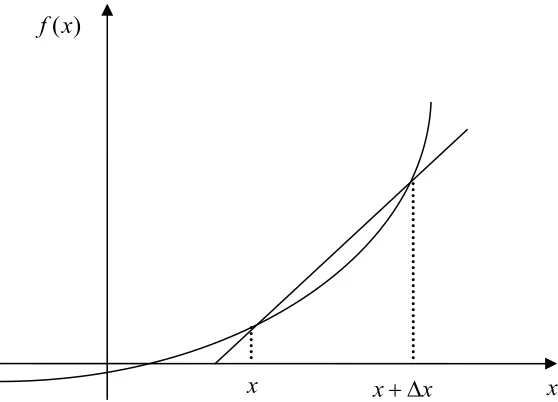
Forward Difference Approximation of the First Derivative
We know
x x f x x f x
f
x
lim0
For a finite x,
x x f x x f x f
Figure 1 Graphical representation of forward difference approximation of first derivative.
So given n1 data points
x0,y0
, x1,y1
, x2,y2
,, xn,yn
, the value of f(x) for1
i
i x x
x , i0,...,n1, is given by
i i
i i
i
x x
x f x f x f
1 1
Example 1
The upward velocity of a rocket is given as a function of time in Table 1.
Table 1 Velocity as a function of time.
(s)
t v(t) (m/s)
0 0 10 227.04 15 362.78 20 517.35 22.5 602.97
30 901.67
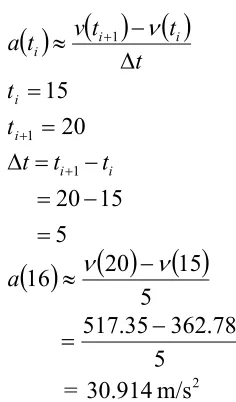
Using forward divided difference, find the acceleration of the rocket at t16 s.
Solution
To find the acceleration at t16 s, we need to choose the two values of velocity closest to s
16
t , that also bracket t16 s to evaluate it. The two points are t15 s and t20 s )
(x f
x
x
tt t
v t
a i i
i
1
15ti
20ti1
5
15 20
1
t ti ti
5 15 20
16
a
5
78 . 362 35 . 517
= 30.914m/s2
Direct Fit Polynomials
In this method, given n1 data points
x0,y0
, x1,y1
, x2,y2
,, xn,yn
, one can fit a nthorder polynomial given by
nn n n
n x a a x a x a x
P 0 1 1 1
To find the first derivative,
2 11 2
1 2 1
)
(
n
n n
n n
n a a x n a x na x
dx x dP x
P
Similarly, other derivatives can also be found.
Example 2
The upward velocity of a rocket is given as a function of time in Table 2.
Table 2 Velocity as a function of time. (s)
t v(t) (m/s) 0 0 10 227.04 15 362.78 20 517.35 22.5 602.97
30 901.67
Using a third order polynomial interpolant for velocity, find the acceleration of the rocket at s
16
t .
Solution
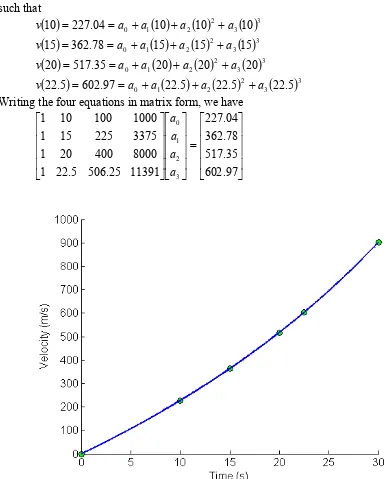
For the third order polynomial (also called cubic interpolation), we choose the velocity given by
33 2 2 1
0 at a t a t
a t
Since we want to find the velocity at t16s, and we are using a third order polynomial, we
Writing the four equations in matrix form, we have
Solving the above four equations gives 3810a0 4.
289 . 21
1
a
13065 . 0
2
a
0054606a3 0. Hence
33 2 2 1
0 at a t a t
a t
v
4.381021.289t0.13065t2 0.0054606t3, 10t22.5 The acceleration at t16 is given by
16
16 t t v dtd a
Given that
4.381021.289 0.13065 20.0054606 3, 10 22.5t t
t t
t
v ,
v
t dtd t a
2 3
0054606 .
0 13065 . 0 289 . 21 3810 . 4
t t t
dt
d
21.2890.26130 0.016382 2, 10 22.5
t t
t
216 016382 .
0 16 26130 . 0 289 . 21
16
a
29.664m/s2
Lagrange Polynomial
In this method, given
x0,y0
,,
xn,yn
, one can fit a nth order Lagrangian polynomial given by
n i
i i
n x L x f x
f
0
) ( ) ( )
(
where n in fn(x) stands for the th
n order polynomial that approximates the function )
(x f
y and
n
i j
j i j
j i
x x
x x x
L
0
) (
) (x
Li is a weighting function that includes a product of n1 terms with terms of ji
omitted.
Then to find the first derivative, one can differentiate fn
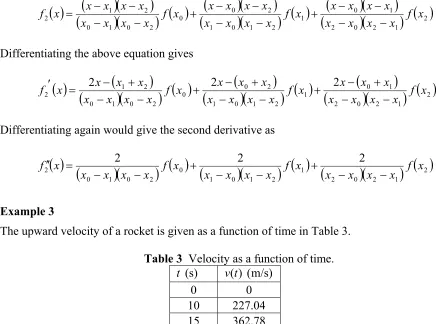
x once, and so on for other derivatives.For example, the second order Lagrange polynomial passing through
2Differentiating the above equation gives
2Differentiating again would give the second derivative as
2The upward velocity of a rocket is given as a function of time in Table 3.
Table 3 Velocity as a function of time.
Determine the value of the acceleration at t 16s using second order Lagrangian polynomial interpolation for velocity.
Solution
DIFFERENTIATION Topic Differentiation of Discrete Functions
Summary These are textbook notes differentiation of discrete functions Major General Engineering
Authors Autar Kaw, Luke Snyder Date December 23, 2009