STUDI PEMODELAN TRANSPORTASI DI
RUAS J ALAN NGINDEN AKIBAT J ALAN MERR II-C
( SEGMEN KEDUNG BARUK – SEMOLOWARU )
SURABAYA
TUGAS AKHIR
Untuk memenuhi sebagian pesyaratan dalam memperoleh
gelar sarjana ( S-1 ) Jurusan Teknik Sipil
Oleh :
F E R I A N T O
NPM : 0553310098
PROGRAM STUDI TEKNIK SIPIL
FAKULTAS TEKNIK SIPIL DAN PERENCANAAN
UNIVERSITAS PEMBANGUNAN NASIONAL ”VETERAN” J ATIM SURABAYA
melimpahkan rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan penyusunan Tugas Akhir dengan judul ”Studi Pemodelan Transportasi Di Ruas Jalan Nginden Akibat Jalan MERR II-C (Segmen Kedung Baruk - Semolowaru) Surabaya”. Tugas akhir ini disusun sebagai salah satu syarat untuk melengkapi tugas akademik dan memenuhi salah satu persyaratan untuk menyelesaikan pendidikan Strata 1 ( S1 ) Program Studi Teknik Sipil, Fakultas Teknik Sipil dan Perencanaan Universitas Pembangunan Nasional “Veteran“ Jawa Timur.
Banyak pihak yang memberikan bimbingan serta bantuan yang begitu besar artinya bagi penulis hingga terwujud Tugas Akhir ini. Maka tidaklah berlebihan apabila pada kesempatan ini penulis menyampaikan rasa terima kasih yang sebesar - besarnya kepada yang terhormat :
1. Ibu Naniek Ratni Jar.,M.Kes. selaku Dekan Fakultas Teknik Sipil dan Perencanaan Universitas Pembangunan Nasional ”Veteran” Jawa Timur. 2. Bapak Ibnu Sholichin.,ST,MT. selaku Ketua Jurusan Teknik Sipil,
Fakultas Teknik Sipil dan Perencanaan Universitas Pembangunan Nasional ”Veteran” Jawa Timur. Dan selaku Dosen Pembimbing Utama dalam penyelesaian Tugas Akhir ini yang telah banyak memberikan pengarahan dan wawasan.
telah banyak memberikan bimbingan dan pengarahan dalam penyelesaian Tugas Akhir ini.
5. Para Dosen dan Staff Pengajar yang telah banyak memberikan bekal ilmu dan pengetahuan yang amat berguna.
6. Bapak, Ibu dan seluruh keluarga tercinta yang telah berkorban dan memberikan dukungan moral, spiritual, dan materi sehingga penulis dapat menyelesaikan Tugas Akhir ini.
7. Seluruh rekan - rekan mahasiswa Jurusan Teknik Sipil Universitas Pembangunan Nasional “Veteran” Jawa Timur serta semua pihak yang terkait dan tidak dapat penulis sebutkan satu persatu.
Penulis menyadari bahwa masih banyak kekurangan dalam penyusunan Tugas Akhir ini. Kritik dan saran yang konstruktif senantiasa penulis harapkan demi kemajuan bersama. Semoga laporan Tugas Akhir ini dapat bermanfaat bagi penulis khususnya dan para pembaca pada umumnya.
Surabaya, Juni 2012
DAFTAR ISI ... ii
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xxii
BAB I PENDAHULUAN 1.1 Latar belakang ... 1
1.2 Rumusan masalah ... 2
1.3 Tujuan ... 3
1.4 Batasan masalah ... 3
1.5 Lokasi studi ... 4
BAB II TINJ AUAN PUSTAKA 2.1 Jalan perkotaan ... 6
2.1.1 Klasifikasi jalan berdasarkan fungsi ... 7
2.1.2 Klasifikasi jalan berdasarkan kelas ... 7
2.1.3 Kapasitas jalan ... 9
2.1.4 Derajat kejenuhan ... 10
2.2 Arus dan komposisi lalu lintas ... 12
2.2.1 Karakteristik arus lalu lintas ... 12
2.2.2 Volume lalu lintas ... 15
2.3.3 Modal split ... 25
2.3.4 Trip assignment ... 26
2.4 Model analisa regresi ... 27
2.4.1 Model analisa regresi-linear ... 27
2.4.2 Model analisa regresi-linear-berganda ... 28
2.5 Alternatif model sebaran perjalanan ... 29
2.6 Model gravity ... 31
2.6.1 Model tanpa-batasan (UCGR) ... 32
2.6.2 Model dengan-batasan-bangkitan (PCGR) ... 33
2.6.3 Model dengan-batasan-tarikan (ACGR) ... 33
2.6.4 Model dengan-batasan-bangkitan-tarikan (PACGR) ... 34
2.7 Kalibrasi model gravity ... 34
2.8 Fungsi hambatan ... 35
2.8.1 Fungsi hambatan pangkat ... 35
2.8.2 Fungsi hambatan eksponensial negatif ... 36
2.8.3 Fungsi hambatan eksponensial Tanner ... 37
2.9 Model transportasi berdasarkan data arus lalu lintas ... 38
BAB III METODOLOGI 3.1 Identifikasi permasalahan ... 40
3.6 Metodologi perencanaan (flow chart) ... 43
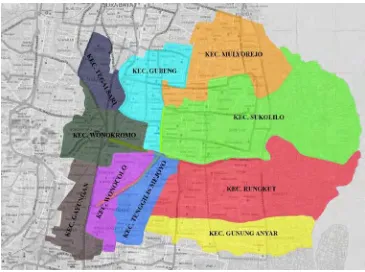
BAB IV ANALISA DATA DAN PEMBAHASAN 4.1 Pembagian zona wilayah studi ... 45
4.2 Analisa data arus lalu lintas ... 47
4.2.1 Volume arus lalu lintas ... 48
4.2.2 Hasil survei lalu lintas ... 49
4.2.3 Arus lalu lintas tiap zona ... 54
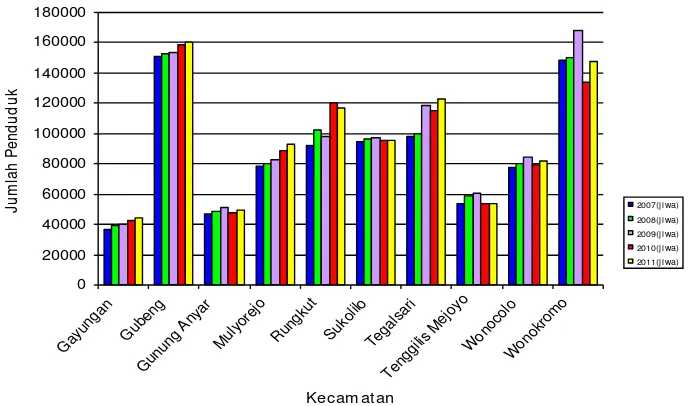
4.3 Analisa pertumbuhan jumlah penduduk ... 55
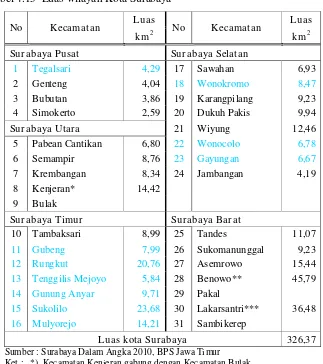
4.4 Luas wilayah studi ... 57
4.4.1 Penggunaan lahan wilayah studi ... 58
4.5 Data jumlah sekolah dan perguruan tinggi ... 61
4.6 Analisa bangkitan dan tarikan perjalanan ... 61
4.6.1 Jumlah perjalanan dengan pertumbuhan jumlah penduduk ... 62
4.6.2 Jumlah perjalanan dengan penggunaan lahan ... 67
4.6.3 Jumlah perjalanan dengan jumlah sekolah ... 72
4.6.4 Rekapitulasi hasil analisa regresi linier ... 77
4.7 Analisa sebaran perjalanan (trip distribution) ... 79
perjalanan dengan pertumbuhan penduduk ... 81 4.7.2.2 Analisa fungsi hambatan eksponensial-negatif
jumlah perjalanan dengan pertumbuhan
penduduk ... 82 4.7.2.3 Analisa fungsi hambatan Tanner jumlah
perjalanan dengan pertumbuhan penduduk ... 84 4.7.3 Model gravity tanpa-batasan (UCGR) jumlah perjalanan
dengan pertumbuhan penduduk ... 85 4.7.3.1 Model gravity UCGR jumlah perjalanan
dengan pertumbuhan penduduk menggunakan fungsi hambatan pangkat ... 86 4.7.3.2 Model gravity UCGR jumlah perjalanan
dengan pertumbuhan penduduk menggunakan fungsi hambatan eksponensial-negatif ... 91 4.7.3.3 Model gravity UCGR jumlah perjalanan
dengan pertumbuhan penduduk menggunakan fungsi hambatan Tanner ... 95 4.7.3.4 Analisa regresi linier hasil model gravity
perjalanan dengan penggunaan lahan ... 102 4.7.4.2 Analisa fungsi hambatan eksponensial-negatif
jumlah perjalanan dengan penggunaan lahan .. 104 4.7.4.3 Analisa fungsi hambatan Tanner jumlah
perjalanan dengan penggunaan lahan ... 105 4.7.5 Model gravity tanpa-batasan (UCGR) jumlah perjalanan
dengan penggunaan lahan ... 107 4.7.5.1 Model gravity UCGR jumlah perjalanan
dengan penggunaan lahan menggunakan fungsi hambatan pangkat ... 108 4.7.5.2 Model gravity UCGR jumlah perjalanan
dengan penggunaan lahan menggunakan fungsi hambatan eksponensial-negatif 112 4.7.5.3 Model gravity UCGR jumlah perjalanan
dengan penggunaan lahan menggunakan fungsi hambatan Tanner ... 116 4.7.5.4 Analisa regresi linier hasil model gravity
perjalanan dengan jumlah sekolah ... 123 4.7.6.2 Analisa fungsi hambatan eksponensial-negatif
jumlah perjalanan dengan jumlah sekolah ... 125 4.7.6.3 Analisa fungsi hambatan Tanner jumlah
perjalanan dengan jumlah sekolah ... 126 4.7.7 Model gravity tanpa-batasan (UCGR) jumlah perjalanan
dengan jumlah sekolah ... 128 4.7.7.1 Model gravity UCGR jumlah perjalanan
dengan jumlah sekolah menggunakan fungsi hambatan pangkat ... 129 4.7.7.2 Model gravity UCGR jumlah perjalanan
dengan jumlah sekolah menggunakan fungsi hambatan eksponensial-negatif ... 133 4.7.7.3 Model gravity UCGR jumlah perjalanan
dengan jumlah sekolah menggunakan fungsi hambatan Tanner ... 137 4.7.7.4 Analisa regresi linier hasil model gravity
UCGR jumlah perjalanan dengan jumlah
studi ... 146
4.9 Sebaran perjalanan (trip distribution) untuk setiap jenis kendaraan pada wilayah studi ... 148
4.9.1 Sebaran perjalanan untuk LV (Light Vehicle) ... 149
4.9.2 Sebaran perjalanan untuk HV (Heavy Vehicle) ... 155
4.9.3 Sebaran perjalanan untuk MC (Motorcycle) ... 161
4.9.4 Rekapitulasi sebaran perjalanan untuk setiap jenis kendaraan ... 167
4.9.5 Analisa regresi linier sebaran perjalanan untuk setiap jenis kendaraan ... 168
4.10 Analisa trip generation pada umur rencana ... 170
4.11 Analisa sebaran perjalanan (trip distribution) pada umur rencana ... 176
4.11.1 Sebaran perjalanan untuk LV (Light Vehicle) pada umur rencana ... 178
4.11.2 Sebaran perjalanan untuk HV (Heavy Vehicle) pada umur rencana ... 184
4.12 Diagram arus kendaraan pada zona studi ... 203 4.13 Pembebanan jalan Panjang Jiwo akibat jalan MERR II-C ... 207 4.14 Ringkasan hasil analisa ... 213 BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan ... 216 5.2 Saran ... 218 DAFTAR PUSTAKA
Tabel 2.2 Kapasitas dasar (Co) untuk jalan perkotaan ... 10
Tabel 2.3 Komposisi arus lalu lintas ... 12
Tabel 2.4 Bentuk umum dari Matriks Asal-Tujuan (MAT) ... 24
Tabel 4.1 Emp untuk jalan perkotaan tak-terbagi ... 48
Tabel 4.2 Emp untuk jalan perkotaan terbagi dan satu arah ... 49
Tabel 4.3 Rata-rata jumlah kendaraan pada jalan Nginden arah Utara ke Selatan tanggal 12- 15 Desember 2011, tipe jalan (6/2 D) ... 50
Tabel 4.4 Rata-rata jumlah kendaraan pada jalan Nginden arah Selatan ke Utara tanggal 12- 15 Desember 2011, tipe jalan (6/2 D) ... 50
Tabel 4.5 Rata-rata jumlah kendaraan pada jalan Panjang Jiwo arah Timur ke Barat tanggal 12 - 15 Desember 2011, tipe jalan (6/2 D) ... 51
Tabel 4.6 Rata-rata jumlah kendaraan pada jalan Panjang Jiwo arah Barat ke Timur tanggal 12 - 15 Desember 2011, tipe jalan (6/2 D) ... 51
Tabel 4.7 Rata-rata jumlah kendaraan pada jalan Prapen arah Selatan ke Utara tanggal 12 -15 Desember 2011, tipe jalan (6/2 D) ... 52
Tabel 4.8 Rata-rata jumlah kendaraan pada jalan Prapen arah Utara ke Selatan tanggal 12 - 15 Desember 2011, tipe jalan (6/2 D) ... 52
Tabel 4.11 Besarnya volume kendaraan yang berasal dari zona wilayah studi
(bangkitan perjalanan) ... 54
Tabel 4.12 Besarnya volume kendaraan yang menuju zona wilayah studi (tarikan perjalanan) ... 54
Tabel 4.13 Jumlah penduduk pada wilayah studi ... 55
Tabel 4.14 Pertumbuhan jumlah penduduk pada wilayah studi ... 56
Tabel 4.15 Luas wilayah Kota Surabaya ... 57
Tabel 4.17 Jumlah sekolah dan perguruan tinggi pada wilayah studi ... 61
Tabel 4.18 Pertumbuhan jumlah penduduk di Zona A ... 62
Tabel 4.19 Pertumbuhan jumlah penduduk di Zona B ... 63
Tabel 4.20 Pertumbuhan jumlah penduduk di Zona C ... 63
Tabel 4.21 Pertumbuhan jumlah penduduk di Zona D ... 63
Tabel 4.22 Tingkat pertumbuhan penduduk dengan bangkitan perjalanan .... 64
Tabel 4.23 Tingkat pertumbuhan penduduk dengan tarikan perjalanan ... 64
Tabel 4.24 Penggunaan lahan di Zona A ... 67
Tabel 4.25 Penggunaan lahan di Zona B ... 68
Tabel 4.26 Penggunaan lahan di Zona C ... 68
Tabel 4.27 Penggunaan lahan di Zona D ... 68
Tabel 4.28 Penggunaan lahan dengan bangkitan perjalanan ... 69
Tabel 4.33 Jumlah sekolah dan perguruan tinggi di Zona D ... 73
Tabel 4.34 Jumlah sekolah dengan bangkitan perjalanan ... 74
Tabel 4.35 Jumlah sekolah dengan tarikan perjalanan ... 74
Tabel 4.36 Rekapitulasi hasil regresi linier untuk bangkitan perjalanan ... 78
Tabel 4.37 Rekapitulasi hasil regresi linier untuk tarikan perjalanan ... 78
Tabel 4.38 Data matriks perjalanan (Tid) ... 80
Tabel 4.39 Data matriks pertumbuhan penduduk (Cid) ... 80
Tabel 4.40 Perhitungan dengan metode analisa regresi linier jumlah perjalanan dengan pertumbuhan penduduk (fungsi hambatan pangkat) ... 81
Tabel 4.41 Perhitungan dengan metode analisa regresi linier jumlah perjalanan dengan pertumbuhan penduduk (fungsi hambatan eksponensial-negatif) ... 83
Tabel 4.42 Perhitungan dengan metode analisa regresi linier jumlah perjalanan dengan pertumbuhan penduduk (fungsi hambatan Tanner) ... 84
Tabel 4.43 Nilai parameter β untuk setiap fungsi hambatan jumlah perjalanan dengan pertumbuhan penduduk ... 86
Tabel 4.44 Matriks fungsi hambatan pangkat pertumbuhan penduduk Cid−β... 86
Tabel 4.47 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
penduduk e−βCid ... 91
Tabel 4.48 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR jumlah perjalanan dengan pertumbuhan penduduk (fungsi
hambatan eksponensial-negatif) ... 93 Tabel 4.49 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan
pertumbuhan penduduk (fungsi hambatan eksponensial-negatif) setelah modifikasi ... 94 Tabel 4.50 Matriks fungsi hambatan Tanner pertumbuhan penduduk
(
Cid)
id e
C−β ⋅ −β ... 95 Tabel 4.51 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR
jumlah perjalanan dengan pertumbuhan penduduk (fungsi
hambatan Tanner) ... 97 Tabel 4.52 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan
pertumbuhan penduduk (fungsi hambatan Tanner) setelah
modifikasi ... 98 Tabel 4.53 Data matriks penggunaan lahan (Cid) ... 102
Tabel 4.54 Perhitungan dengan metode analisa regresi linier jumlah
Tabel 4.56 Perhitungan dengan metode analisa regresi linier jumlah
perjalanan dengan penggunaan lahan (fungsi hambatan Tanner) .. 106 Tabel 4.57 Nilai parameter β untuk setiap fungsi hambatan jumlah
perjalanan dengan penggunaan lahan ... 107 Tabel 4.58 Matriks fungsi hambatan pangkat penggunaan lahan Cid−β ... 108 Tabel 4.59 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR
jumlah perjalanan dengan penggunaan lahan (fungsi hambatan pangkat) ... 110 Tabel 4.60 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan
penggunaan lahan (fungsi hambatan pangkat) setelah modifikasi . 111 Tabel 4.61 Matriks fungsi hambatan eksponensial-negatif penggunaan lahan
id C
e−β ... 112 Tabel 4.62 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR
jumlah perjalanan dengan penggunaan lahan (fungsi hambatan eksponensial-negatif) ... 114 Tabel 4.63 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan
penggunaan lahan (fungsi hambatan eksponensial-negatif) setelah modifikasi ... 115 Tabel 4.64 Matriks fungsi hambatan Tanner penggunaan lahan
(
Cid)
id e
Tabel 4.66 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan penggunaan lahan (fungsi hambatan Tanner) setelah modifikasi .. 119 Tabel 4.67 Data matriks jumlah sekolah (Cid) ... 123
Tabel 4.68 Perhitungan dengan metode analisa regresi linier jumlah
perjalanan dengan jumlah sekolah (fungsi hambatan pangkat) ... 124 Tabel 4.69 Perhitungan dengan metode analisa regresi linier jumlah
perjalanan dengan jumlah sekolah (fungsi hambatan eksponensial-negatif) ... 125 Tabel 4.70 Perhitungan dengan metode analisa regresi linier jumlah
perjalanan dengan jumlah sekolah (fungsi hambatan Tanner) ... 127 Tabel 4.71 Nilai parameter β untuk setiap fungsi hambatan jumlah
perjalanan dengan jumlah sekolah ... 128 Tabel 4.72 Matriks fungsi hambatan pangkat jumlah sekolah Cid−β... 129 Tabel 4.73 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR
jumlah perjalanan dengan jumlah sekolah (fungsi hambatan
pangkat) ... 131 Tabel 4.74 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan
jumlah sekolah (fungsi hambatan pangkat) setelah modifikasi ... 132 Tabel 4.75 Matriks fungsi hambatan eksponensial-negatif jumlah sekolah
id C
Tabel 4.77 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan jumlah sekolah (fungsi hambatan eksponensial-negatif) setelah modifikasi ... 136 Tabel 4.78 Matriks fungsi hambatan Tanner jumlah sekolah
(
Cid)
id e
C−β ⋅ −β .... 137 Tabel 4.79 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR
jumlah perjalanan dengan jumlah sekolah (fungsi hambatan
Tanner) ... 139 Tabel 4.80 MAT akhir hasil model gravity UCGR jumlah perjalanan dengan
jumlah sekolah (fungsi hambatan Tanner) setelah modifikasi ... 140 Tabel 4.81 Rekapitulasi analisa regresi linier hasil model gravity UCGR ... 144 Tabel 4.82 MAT hasil model gravity UCGR sebaran perjalanan di setiap
zona ... 145 Tabel 4.83 Volume tiap jenis kendaraan yang berasal dari zona studi
(bangkitan perjalanan) ... 146 Tabel 4.84 Volume tiap jenis kendaraan yang menuju zona studi (tarikan
perjalanan)... 146 Tabel 4.85 Rekapitulasi hasil analisa regresi bangkitan perjalanan untuk tiap
jenis kendaraan ... 147 Tabel 4.86 Rekapitulasi hasil analisa regresi tarikan perjalanan untuk tiap
Tabel 4.90 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk LV ... 150 Tabel 4.91 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
penduduk e−βCid untuk LV ( Light Vehicle)... 151
Tabel 4.92 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR untuk LV (Light Vehicle) ... 153 Tabel 4.93 MAT akhir hasil model gravity UCGR untuk LV (Light Vehicle)
setelah modifikasi ... 154 Tabel 4.94 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk HV ... 155 Tabel 4.95 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
penduduk e−βCid untuk HV ( Heavy Vehicle) ... 157
Tabel 4.96 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR untuk HV (Heavy Vehicle) ... 159 Tabel 4.97 MAT akhir hasil model gravity UCGR untuk HV (Heavy Vehicle)
setelah modifikasi ... 160 Tabel 4.98 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk MC ... 161 Tabel 4.99 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
setelah modifikasi ... 166 Tabel 4.102 MAT hasil model gravity UCGR untuk LV (Light Vehicle) di
setiap zona ... 167 Tabel 4.103 MAT hasil model gravity UCGR untuk HV (Heavy Vehicle) di
setiap zona ... 167 Tabel 4.104 MAT hasil model gravity UCGR untuk MC (Motorcycle) di
setiap zona ... 167 Tabel 4.105 Rekapitulasi hasil analisa regresi sebaran perjalanan untuk tiap
jenis kendaraan ... 169 Tabel 4.106 Analisa regresi jumlah penduduk pada kecamatan Gayungan ... 170 Tabel 4.107 Prediksi jumlah penduduk pada kecamatan Gayungan tahun 2012
sampai tahun 2016 ... 171 Tabel 4.108 Prediksi jumlah penduduk tahun 2012 sampai tahun 2016 pada
wilayah studi ... 172 Tabel 4.109 Prediksi pertumbuhan penduduk tahun 2012 sampai tahun 2016
pada wilayah studi ... 172 Tabel 4.110 Prediksi pertumbuhan penduduk tahun 2012 sampai 2016 di
Zona A ... 173 Tabel 4.111 Prediksi pertumbuhan penduduk tahun 2012 sampai 2016 di
Zona D ... 174 Tabel 4.115 Prediksi bangkitan perjalanan tahun 2016 pada setiap zona studi . 175 Tabel 4.117 Data matriks pertumbuhan penduduk (Cid) tahun 2016 ... 176
Tabel 4.118 Data matriks perjalanan untuk LV (Light Vehicle) tahun 2016 ... 177 Tabel 4.119 Data matriks perjalanan untuk HV (Heavy Vehicle) tahun 2016 ... 177 Tabel 4.120 Data matriks perjalanan untuk MC (Motorcycle) tahun 2016 ... 177 Tabel 4.121 Data matriks perjalanan semua kendaraan (LV, HV, MC) tahun
2016 ... 177 Tabel 4.122 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk LV tahun 2016 ... 178 Tabel 4.123 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
penduduk e−βCid untuk LV tahun 2016 ... 180
Tabel 4.124 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR untuk LV tahun 2016 ... 182 Tabel 4.125 MAT akhir hasil model gravity UCGR untuk LV tahun 2016
setelah modifikasi ... 183 Tabel 4.126 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk HV tahun 2016 ... 184 Tabel 4.127 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
setelah modifikasi ... 189 Tabel 4.130 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk MC tahun 2016 ... 190 Tabel 4.131 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
penduduk e−βCid untuk MC tahun 2016 ... 192
Tabel 4.132 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR untuk MC tahun 2016 ... 194 Tabel 4.133 MAT akhir hasil model gravity UCGR untuk MC tahun 2016
setelah modifikasi ... 195 Tabel 4.134 Perhitungan dengan metode analisa regresi fungsi hambatan
eksponensial-negatif untuk semua kendaraan tahun 2016 ... 196 Tabel 4.135 Matriks fungsi hambatan eksponensial-negatif pertumbuhan
penduduk e−βCid untuk semua kendaraan tahun 2016 ... 198
Tabel 4.136 Matriks Asal-Tujuan (MAT) akhir hasil model gravity UCGR untuk semua kendaraan tahun 2016 ... 200 Tabel 4.137 MAT akhir hasil model gravity UCGR untuk semua kendaraan
tahun 2016 setelah modifikasi ... 201 Tabel 4.138 MAT hasil model gravity UCGR untuk LV (Light Vehicle) tahun
2016 di setiap zona ... 202 Tabel 4.141 MAT hasil model gravity UCGR untuk semua kendaraan (LV, HV
dan MC) tahun 2016 di setiap zona ... 203 Tabel 4.142 Pertumbuhan bangkitan perjalanan pada tahun 2011 sampai tahun
2016 pada setiap zona studi ... 206 Tabel 4.143 Pertumbuhan tarikan perjalanan pada tahun 2011 sampai tahun
2016 pada setiap zona studi ... 206 Tabel 4.144 Pertumbuhan jumlah penduduk di Zona X ... 209 Tabel 4.145 Pertumbuhan jumlah penduduk di Zona Y ... 210 Tabel 4.146 Pertumbuhan jumlah penduduk di Zona Z ... 210 Tabel 4.147 Pertumbuhan penduduk dengan jumlah bangkitan perjalanan
menuju Kedung Baruk yang melalui perempatan MERR II-C ... 210 Tabel 4.148 Prediksi pertumbuhan penduduk tahun 2012 sampai 2016 di
Zona X ... 211 Tabel 4.149 Prediksi pertumbuhan penduduk tahun 2012 sampai 2016 di
Zona Y ... 211 Tabel 4.150 Prediksi pertumbuhan penduduk tahun 2012 sampai 2016 di
Gambar 2.1 Hubungan matematis antara kecepatan, arus, dan kepadatan .... 14 Gambar 2.2 Empat variasi urutan konsep utama ... 22 Gambar 2.3 Jaringan sederhana dan waktu tempuh ruas ... 26 Gambar 3.1 Diagram alir metodologi perencanaan ... 44 Gambar 4.1 Batas kecamatan wilayah studi ... 45 Gambar 4.2 Pembagian zona wilayah studi ... 46 Gambar 4.3 Grafik jumlah penduduk pada wilayah studi tahun 2007 - 2011.. 56 Gambar 4.4 Grafik regresi linier antara pertumbuhan jumlah penduduk
dengan bangkitan perjalanan ... 64 Gambar 4.5 Grafik regresi linier antara pertumbuhan jumlah penduduk
dengan tarikan perjalanan ... 65 Gambar 4.6 Grafik regresi linier antara penggunaan lahan dengan bangkitan
perjalanan ... 69 Gambar 4.7 Grafik regresi linier antara penggunaan lahan dengan tarikan
perjalanan ... 70 Gambar 4.8 Grafik regresi linier antara jumlah sekolah dan perguruan tinggi
dengan bangkitan perjalanan ... 74 Gambar 4.9 Grafik regresi linier antara jumlah sekolah dan perguruan tinggi
dengan tarikan perjalanan ... 75 Gambar 4.10 Diagram arus kendaraan hasil model gravity UCGR tahun 2011
Megaraya ... 207 Gambar 4.13 Pembebanan arus kendaraan pada perempatan MERR II-C ... 208 Gambar 4.14 Pembagian zona pada perempatan MERR II-C ... 208 Gambar 4.15 Diagram arus kendaraan akibat jalan MERR II-C tahun 2016
STUDI PEMODELAN TRANSPORTASI
DI RUAS J ALAN NGINDEN AKIBAT J ALAN MERR II-C ( SEGMEN KEDUNG BARUK – SEMOLOWARU )
SURABAYA FERIANTO
0553310098 ABSTRAK
Berbagai pemberdayaan atau pembangunan sarana dan prasarana dalam bidang transportasi terus diupayakan dan ditingkatkan untuk menangani permasalahan transportasi kemacetan, tundaan, polusi udara dan suara salah satunya adalah pembangunan prasarana transportasi berupa jalan dan jembatan
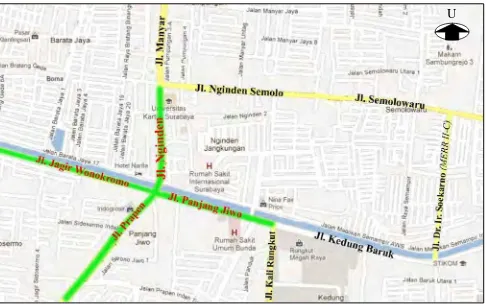
Middle East Ring Road (MERR) II-C sepanjang 6,45 km. Pembangunan jalan MERR II-C khususnya segmen Kedung Baruk - Semolowaru yang terhubung dengan MERR II-A dan B dimaksudkan agar arus lalu lintas dari jalan Kedung Baruk menuju pusat kota yang selama ini menumpuk di jalan Nginden khususnya saat jam puncak (peak hour) akan dapat terurai, selain itu juga akan menjadi jalan akses utama dari Bandara Juanda menuju Jembatan Nasional Suramadu.
Dalam tugas akhir ini akan dibahas studi pemodelan transportasi pada jalan raya Nginden akibat adanya jalan MERR II-C segmen jalan Kedung Baruk - jalan Semolowaru. Data yang diperlukan untuk pemodelan ini adalah data primer yang diperoleh dari survei lapangan berupa traffic counting saat peak hour, sedangkan untuk data sekundernya diperoleh dari BPS Jawa Timur dan instansi terkait yang berupa peta layout wilayah studi, data jumlah penduduk, jumlah sekolah dan lain-lain. Data tersebut akan dianalisa untuk mendapatkan trip generation pada wilayah studi dengan menggunakan metode regresi linier dan selanjutnya dilakukan analisa trip distribution dengan menggunakan model
gravity tanpa-batasan atau model UCGR (Unconstrained Gravity).
Dari hasil analisa yang dilakukan didapatkan jumlah bangkitan perjalanan di jalan Nginden pada kondisi existing (tahun 2011) sebesar 2633 smp/jam, dan tarikan perjalanan sebesar 2606 smp/jam. Sedangkan jumlah bangkitan perjalanan di jalan Nginden pada umur rencana (tahun 2016) sebesar 3403 smp/jam, dan tarikan perjalanan sebesar 3347 smp/jam. Sebaran perjalanan kendaraan yang berasal dari jalan Nginden pada kondisi existing yang terbesar bergerak menuju Panjang Jiwo yaitu 1063 smp/jam, sedangkan yang akan menuju Nginden volume terbesar juga berasal dari Panjang Jiwo yaitu sebesar 1180 smp/jam. Pada umur rencana yaitu tahun 2016 akibat jalan MERR II-C pembebanan volume kendaraan yang berasal dari Panjang Jiwo berkurang 16,95% dari 4471 smp/jam menjadi 3713 smp/jam.
BAB I PENDAHULUAN
1.1 Latar belakang
Transportasi merupakan komponen utama dalam sistem kehidupan, sistem pemerintahan, dan sistem kemasyarakatan. Kondisi sosial dan tingkat kepadatan penduduk suatu wilayah akan memiliki pengaruh signifikan terhadap kinerja transportasi di wilayah tersebut. Di perkotaan, kecenderungan yang terjadi adalah meningkatnya jumlah penduduk yang tinggi karena tingkat kelahiran maupun urbanisasi yang berimplikasi pada semakin padatnya jumlah penduduk. Sehingga secara langsung maupun tidak langsung dapat mengurangi daya saing dari transportasi di suatu wilayah.
sepanjang 1,626 km dari Kenjeran hingga Mulyorejo, jalan MERR II-B sepanjang 2,850 km dari jalan Mulyorejo ke selatan menuju jalan Arif Rahman Hakim.
Pembangunan jalan MERR II-C khususnya segmen Kedung Baruk - Semolowaru yang terhubung dengan MERR II-A dan B dimaksudkan agar arus lalu lintas dari jalan Kedung Baruk menuju pusat kota yang selama ini menumpuk di jalan Nginden khususnya saat jam puncak (peak hour) akan dapat terurai, selain itu juga akan menjadi jalan akses utama dari Bandara Juanda menuju Jembatan Nasional Suramadu.
Dalam tugas akhir ini akan dibahas studi pemodelan transportasi pada jalan raya Nginden setelah adanya jalan MERR II-C segmen Kedung Baruk - Semolowaru, yaitu dengan melakukan analisa bangkitan pergerakan dan kemudian dilakukan analisa sebaran pergerakan (trip distribution) dengan menggunakan model gravity. Penggunaan model gravity dikarenakan selain sangat sederhana dan mudah dimengerti, model ini juga dapat membatasi pemodelan pola pergerakan, sehingga informasi yang dibutuhkan semakin sedikit dan dapat meminimalkan data yang digunakan untuk pemodelan.
1.2 Rumusan masalah
Permasalahan yang akan dibahas dalam tugas akhir ini adalah:
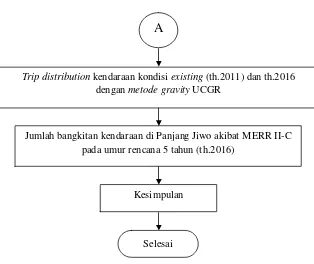
2. Bagaimana sebaran perjalanan arus kendaraan di jalan Nginden pada kondisi existing (tahun 2011) dan pada periode 5 tahun mendatang (tahun 2016) ?
3. Berapa jumlah bangkitan kendaraan di jalan Panjang Jiwo akibat jalan MERR II-C pada periode 5 tahun mendatang (tahun 2016) ?
1.3 Tujuan
Tujuan yang ingin dicapai dalam tugas akhir ini adalah:
1. Mengetahui jumlah bangkitan dan tarikan perjalanan arus kendaraan di jalan Nginden pada kondisi existing (tahun 2011) dan pada tahun 2016. 2. Mengetahui sebaran perjalanan arus kendaraan di jalan Nginden pada
kondisi existing (tahun 2011) dan pada tahun 2016.
3. Mengetahui jumlah bangkitan kendaraan di jalan Panjang Jiwo akibat jalan MERR II-C pada periode 5 tahun mendatang (tahun 2016).
1.4 Batasan masalah
Batasan masalah digunakan untuk memfokuskan studi kasus pada permasalahan pokok agar pembahasan terhadap masalah tidak menyimpang atau meluas dari topik yang akan dibahas. Adapun batasan masalah penulisan tugas akhir ini adalah:
2. Umur rencana yang digunakan dalam pemodelan transportasi adalah 5 tahun.
3. Pemodelan yang digunakan dalam perencanaan adalah trip generation dan
trip distribution.
4. Perhitungan trip generation menggunakan metode regresi linier.
5. Perhitungan trip distribution menggunakan model gravity tanpa-batasan atau model UCGR (Unconstrained Gravity).
6. Fungsi hambatan yang digunakan dalam model gravity adalah fungsi hambatan pangkat, eksponensial-negatif, dan Tanner yang nantinya dipilih salah satu yang terbaik.
7. Tidak menganalisa modal split dan trip assignment.
8. Moda atau kendaraan yang dianalisa adalah sepeda motor (Motorcycle -MC), kendaraan ringan (Light Vehicle - LV), kendaraa berat (Heavy Vehicle - HV).
9. Perjalanan yang dianalisa hanya saat peak hour pagi, siang, dan sore hari. 10. Ruas jalan yang akan diproyeksikan arus lalu lintasnya (dalam satuan
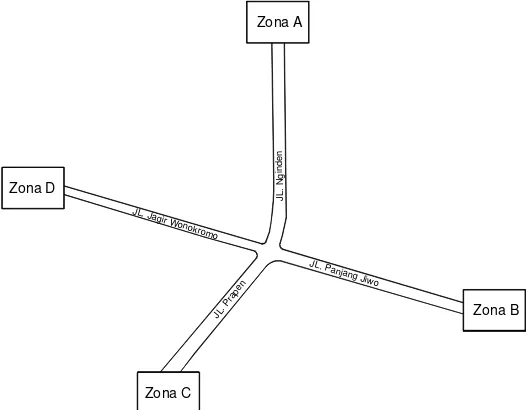
mobil penumpang - smp/jam) adalah jalan Nginden, jalan Panjang Jiwo, jalan Prapen, dan jalan Jagir Wonokromo.
11. Tidak melakukan analisa ekonomi.
1.5 Lokasi studi
U
BAB II
TINJ AUAN PUSTAKA
2.1 J alan per kotaan
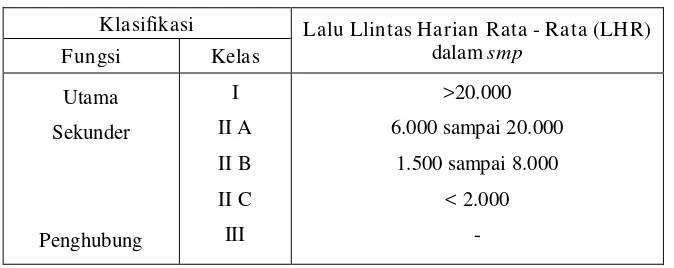
Dalam tugas akhir ini akan dilakukan suatu studi pemodelan transportasi di ruas jalan Nginden-Surabaya, dimana jalan ini diklasifikasikan sebagai jalan arteri/jalan utama yang dianalisa menggunakan model jalan pekotaan. Definisi dari jalan perkotaan itu sendiri adalah suatu jalan yang mempunyai perkembangan secara permanen dan menerus sepanjang seluruh atau hampir seluruh jalan, minimum pada satu sisi jalan, berupa perkembangan lahan atau bukan. Jalan di atau dekat pusat perkotaan dengan penduduk lebih dari 100.000 selalu digolongkan dalam kelompok ini. Jalan di daerah perkotaan dengan penduduk kurang dari 100.000 juga digolongkan dalam kelompok ini jika mempunyai perkembangan samping jalan yang permanen dan menerus. Klasifikasi jalan dibedakan berdasarkan fungsi dan kelas jalan seperti ditunjukkan pada tabel 2.1 sebagai berikut:
Tabel 2.1 Klasifikasi jalan
Klasifikasi Lalu Llintas Harian Rata - Rata (LHR) dalam smp
Fungsi Kelas
Utama
Sekunder
Penghubung
I
II A
II B
II C
III
>20.000
6.000 sampai 20.000
1.500 sampai 8.000
< 2.000
-
2.1.1 Klasifikasi jalan ber dasarkan fungsi
Berdasarkan fungsinya jalan dibedakan menjadi tiga jenis, yaitu: 1. Jalan arteri atau jalan utama
Jalan yang melayani lalu lintas yang tinggi antara kota-kota yang penting atau antara pusat-pusat produksi dan pusat-pusat ekspor. Jalan-jalan dalam golongan ini harus direncanakan untuk dapat melayani lalu lintas yang cepat dan berat.
2. Jalan sekunder atau kolektor
Jalan yang melayani lalu lintas yang cukup tinggi antar kota-kota penting dan kota-kota yang lebih kecil, serta melayani daerah-daerah disekitarnya.
3. Jalan lokal atau penghubung
Jalan untuk keperluan aktifitas daerah yang juga dipakai jalan penghubung antara jalan-jalan dari golongan yang sama atau yang berlainan.
2.1.2 Klasifikasi jalan ber dasarkan kelas
2. Kelas II : Kelas jalan ini mencakup semua jalan sekunder. Dalam komposisi lalu lintasnya terdapat lalu lintas lambat. Kelas jalan ini berdasarkan komposisi dan sifat lalu lintasnya dibagi dalam tiga kelas, yaitu : II A, II B, dan II C.
a. Kelas IIA : adalah jalan raya sekunder dua jalur atau lebih dengan konstruksi permukaan jalan dari jenis aspal beton (hot mix) atau yang setara, dimana dalam komposisi lalu lintasnya terdapat kendaraan lambat tapi tanpa kendaraan tak bermotor. Untuk lalu lintas lambat, harus disediakan jalur tersendiri.
b. Kelas IIB : adalah jalan raya sekunder dua jalur dengan konstruksi permukaan jalan dari penetrasi berganda atau yang setaraf dimana dalam komposisi lalu lintasnya terdapat kendaraan lambat, tetapi tanpa kendaraan yang tak bermotor.
c. Kelas IIC : adalah jalan raya sekunder dua jalur dengan konstruksi permukaan jalan dari jenis penetrasi tunggal dimana dalam komposisi lalu lintasnya terdapat kendaraan tak bermotor.
2.1.3 Kapasitas jalan
Kapasitas jalan dapat didefinisikan sebagai arus maksimum melalui suatu titik di jalan yang dapat dipertahankan per satuan jam dalam kondisi tertentu. Untuk jalan dengan banyak jalur, arus dipisahkan per arah dan kapasitas ditentukan per lajur.
Kapasitas ( C ) dinyatakan dalam satuan mobil penumpang ( smp ). Adapun persamaan dasar untuk menentukan kapasitas adalah sebagai berikut :
C = Co x FCw x FCsp x FCfs x FCcs ( 2.1 )
dimana :
C = Kapasitas ( smp/jam ).
Co = Kapasitas dasar untuk kondisi tertentu ( smp/jam ). FCw = Faktor penyesuaian lebar jalur lalu lintas.
FCsp = Faktor penyesuaian pemisah arah. FCsf = Faktor penyesuaian hambatan samping. FCcs = Faktor penyesuaian ukuran kota. Sumber : MKJI Tahun 1997 Hal : 5 – 18
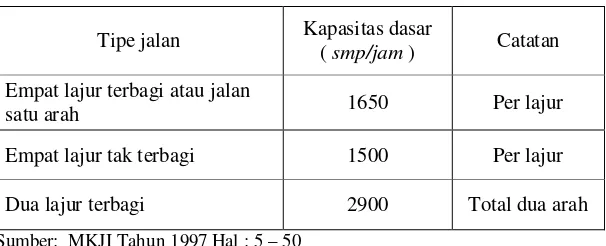
Kapasitas jalan terbagi dalam tiga golongan, antara lain :
Tabel 2.2 Kapasitas dasar (Co) untuk jalan perkotaan
Tipe jalan Kapasitas dasar
( smp/jam ) Catatan
Empat lajur terbagi atau jalan
satu arah 1650 Per lajur
Empat lajur tak terbagi 1500 Per lajur
Dua lajur terbagi 2900 Total dua arah
Sumber: MKJI Tahun 1997 Hal : 5 – 50
2. Kapasitas rencana (design capacity) adalah kapasitas jalan untuk perencanaan yang dinyatakan sebagai jumlah kendaraan yang melalui tiap satu satuan waktu.
3. Kapasitas mungkin (possible capacity) adalah jumlah kendaraan yang melalui satu titik dalam satu satuan waktu dengan memperhatikan percepatan dan perlambatan yang terjadi pada jalan tersebut.
2.1.4 Der ajat kejenuhan
Derajat kejenuhan ( Ds ) dapat didefinisikan sebagai rasio arus terhadap kapasitas, digunakan sebagai faktor utama dalam penentuan tingkat kinerja simpang dan segmen jalan, nilai derajat kejenuhan menunjukkan apakah segmen jalan tersebut mempunyai masalah kapasitas atau tidak, derajat kejenuhan dapat dihitung dengan rumus sebagai berikut :
Ds =
C Q
dimana :
Ds = Derajat kejenuhan (smp/jam) Q = Arus lalu lintas (smp/jam) C = Kapasitas jalan (smp/jam)
Derajat kejenuhan (Ds) dapat dihitung dengan menggunakan arus lalu lintas dan kapasitas jalan dinyatakan dengan satuan (smp/jam), derajat kejenuhan (Ds) digunakan untuk menganalisa tingkat kinerja yang berkaitan dengan kecepatan.
2.2 Ar us dan komposisi lalu lintas
Nilai arus lalu lintas mencerminkan komposisi lalu lintas dengan menyatakan arus lalu lintas dalam satuan mobil penumpang (smp). Semua nilai arus lalu lintas diubah menjadi satuan mobil penumpang (smp) dengan menggunakan ekuivalen mobil penumpang (emp) untuk masing-masing tipe kendaraan tergantung pada tipe jalan dan arus lalu lintas total yang dinyatakan dalam satuan kendaraan/jam, untuk tipe-tipe kendaraan adalah sebagai berikut :
1. Kendaraan ringan ( LV ), termasuk mobil penumpang, minibus, pickup, truk dan jeep.
2. Kendaraan berat ( HV ), termasuk truk dan bus. 3. Sepeda motor ( MC ).
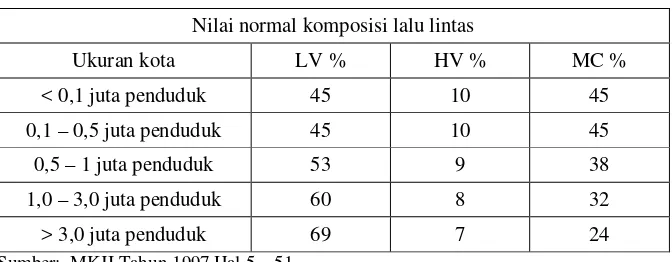
Tabel 2.3 Komposisi arus lalu lintas
Nilai normal komposisi lalu lintas
Ukuran kota LV % HV % MC %
< 0,1 juta penduduk 45 10 45
0,1 – 0,5 juta penduduk 45 10 45
0,5 – 1 juta penduduk 53 9 38
1,0 – 3,0 juta penduduk 60 8 32
> 3,0 juta penduduk 69 7 24
Sumber: MKJI Tahun 1997 Hal 5 – 51
2.2.1 Karakter istik ar us lalu lintas
ketiga parameter tersebut saling berhubungan secara matematis satu dengan lainnya, yaitu :
a. Arus (Volume) lalu lintas, dinyatakan dengan notasi V adalah jumlah kendaraan yang melewati suatu titik tertentu dalam suatu ruas jalan tertentu dalam satu satuan waktu tertentu, biasa dinyatakan dalam satuan kendaraan/jam.
b. Kepadatan (Density) lalu lintas, dinyatakan dengan notasi D adalah jumlah kendaraan yang berada dalam satu satuan panjang jalan tertentu, biasa dinyatakan dalam satuan kendaraan/km.
c. Kecepatan (Speed) lalu lintas, dinyatakan dengan notasi S adalah jarak yang dapat ditempuh dalam satu satuan waktu tertentu, biasa dinyatakan dalam satuan km/jam.
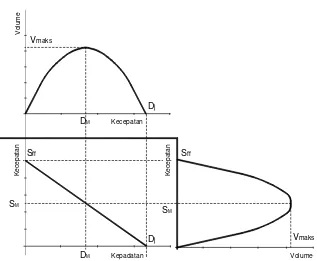
Analisis karakteristik arus lalu lintas untuk suatu ruas jalan dapat dilakukan dengan mempelajari hubungan matematis antara kecepatan, arus, dan kepadatan lalu lintas yang terjadi pada ruas jalan tersebut. Hubungan matematis antara kecepatan, arus, dan kepadatan dapat dinyatakan dengan persamaan berikut
ini: V = D . S ( 2.3 )
Gambar 2.1 Hubungan matematis antara kecepatan, arus, dan kepadatan Sumber: Wohl and Martin (1967), Pignataro (1973), Salter (1978), dan Hobbs (1979)
dimana :
VM = kapasitas atau arus maksimum (kendaraan/jam)
SM = kecepatan pada kondisi arus lalu lintas maksimum (km/jam)
DM = kepadatan pada kondisi arus lalu lintas maksimum
(kendaraan/km)
Dj = kepadatan pada kondisi arus lalu lintas macet total
(kendaraan/km)
Sff = kecepatan pada kondisi arus lalu lintas sangat rendah atau pada
kondisi kepadatan mendekati 0 (nol) atau kecepatan arus bebas (km/jam)
Vmaks
Volum
Dj
DM Kecepatan
Ke
ce
pat
a
n
Ke
ce
pat
a
n
Kepadatan Volume
Vmaks Sff
SM
Dj
DM
SM
Hubungan matematis antara kecepatan - kepadatan adalah monoton ke bawah yang menyatakan bahwa apabila kepadatan lalu lintas meningkat, maka kecepatan akan menurun. Arus Ialu lintas akan menjadi 0 (nol) apabila kepadatan sangat tinggi sedemikian rupa sehingga tidak memungkinkan kendaraan untuk bergerak lagi. Kondisi seperti ini dikenal dengan kondisi macet total (D = Dj).
Pada kondisi kepadatan 0 (nol) (D = 0), tidak terdapat kendaraan di ruas jalan sehingga arus lalulintas 0 (nol).
Apabila kepadatan meningkat dari nol, maka kecepatan akan menurun sedangkan arus lalu lintas akan meningkat. Apabila kepadatan terus meningkat, maka akan dicapai suatu kondisi di mana peningkatan kepadatan tidak akan meningkatkan arus lintas, malah sebaliknya akan menurunkan arus lalu lintas (lihat gambar 2.1). Titik maksimum arus lalu lintas tersebut dinyatakan sebagai kapasitas arus.
2.2.2 Volume lalu lintas
Sebagai pengukur jumlah dari arus lalu lintas digunakan “Volume”. Volume lalu lintas menunjukkan jumlah kendaraan yang melintasi satu titik pengamatan dalam satu satuan waktu (hari, jam, menit). Volume lalu lintas yang tinggi membutuhkan lebar perkerasan jalan yang lebih lebar, sehingga tercipta kenyamanan dan keamanan.
1. Lalu lintas harian rata-rata (LHR)
Lalu lintas harian rata (LHR) adalah volume lalu lintas rata-rata dalam satu hari. Dari cara memperoleh data tersebut dikenal 2 jenis LHR, yaitu Lalu Lintas Harian Rata-Rata Tahunan (LHRT) dan Lalu Lintas Harian Rata-Rata (LHR).
a. LHRT adalah jumlah lalu lintas kendaraan rata-rata yang melewati satu jalur jalan selama 24 jam dan diperoleh dari data selama satu tahun penuh.
365
tahun 1 dalam lintas lalu Jumlah =
LHRT ( 2.4 )
LHRT dinyatakan dalam smp/hari/2 arah atau kendaraan/hari/2 arah untuk jalan 2 jalur 2 arah, smp/hari/1 arah atau kendaraan/arah/1 arah untuk jalan berlajur banyak dengan median.
b. LHR adalah hasil bagi jumlah kendaraan yang diperoleh selama pengamatan dengan lamanya pengamatan.
pengamatan Lamanya
pengamatan selama
lintas lalu Jumlah
=
LHR ( 2.5 )
Data LHR ini cukup teliti jika :
1) Pengamatan dilakukan pada interval-interval waktu yang cukup menggambarkan fluktuasi arus lalu lintas selama 1 tahun.
2. Volume jam perencanaan (VJP)
Arus lalu lintas bervariasi dari jam ke jam berikutnya dalam satu hari, maka sangat cocoklah jika volume lalu lintas dalam 1 jam dipergunakan untuk perencanaan. Volume dalam 1 jam yang dipakai untuk perencanaan dinamakan "Volume Jam Perencanaan (VJP)".
Volume 1 jam yang dapat dipergunakan sebagai VJP haruslah sedemikian rupa sehingga:
a. Volume tersebut tidak boleh terlalu sering terdapat pada distribusi arus lalu lintas setiap jam untuk periode satu tahun.
b. Apabila terdapat volume arus lalu lintas per jam yang melebihi volume jam perencanaan, maka kelebihan tersebut tidak boleh mempunyai nilai yang terlalu besar.
c. Volume tersebut tidak boleh mempunyai nilai yang sangat besar, sehingga akan mengakibatkan jalan akan menjadi lenggang dan biayanya pun mahal.
VJP = K . LHR atau
K VJP
=
LHR ( 2.6 )
3. Kapasitas
Kapasitas adalah jumlah kendaraan maksimum yang dapat melewati suatu penampang jalan pada jalur jalan selama 1 jam dengan kondisi serta arus lalu lintas tertentu.
Perbedaan antara VJP dan kapasitas adalah VJP menunjukkan jumlah arus lalu lintas yang direncanakan akan melintasi suatu penampang jalan selama satu jam, sedangkan kapasitas menunjukkan jumlah arus lalu lintas yang maksimum dapat melewati penampang tersebut dalam waktu 1 jam sesuai dengan kondisi jalan (sesuai dengan lebar lajur, kebebasan samping, kelandaian, dan lain-lain).
Nilai kapasitas dapat diperoleh dari penyesuaian kapasitas dasar atau ideal dengan kondisi dari jalan yang direncanakan.
2.2.3 Kecepatan tempuh
Kecepatan tempuh sebagai ukuran utama kinerja segmen jalan dan merupakan masukan yang penting untuk biaya pemakai jalan dalam analisa ekonomi karena mudah dimengerti dan diukur.
Kecepatan tempuh didefinisikan sebagai kecepatan rata-rata ruang dari kendaraan ringan (LV) sepanjang segmen jalan. Kecepatan tempuh dapat dicari dengan rumus sebagai berikut :
V =
TT L
( 2.7 )
dimana :
L = Panjang segmen jalan (km)
TT = Waktu tempuh rata-rata kendaraan ringan sepanjang segmen jalan (jam)
2.3 Pemodelan
Di dalam bukunya Perencanaan dan Pemodelan Transportasi, 2003, Ofyar Z. Tamin menjelaskan bahwa model adalah alat bantu atau media yang dapat digunakan untuk mencerminkan dan menyederhanakan suatu realita secara terukur. Ada 3 macam bentuk model, yaitu :
1. Model fisik
2. Model peta atau diagram
3. Model statistik dan matematik yang dapat menerangkan secara terukur beberapa aspek fisik, sosial ekonomi, atau model transportasi.
Model dapat digunakan utuk kepentingan peramalan pada masa mendatang, dimana suatu model yang cocok untuk daerah tertentu belum tentu cocok utuk daerah yang lain. Selain itu, model yang sama akan mempunyai parameter yang berbeda jika digunakan pada daerah yang berbeda. Hal ini dapat diterima secara logika, karena situasi ini kondisi dan jenis peruntukan lahan serta perilaku pergerakan berbeda pada daerah yang berbeda.
Didalam perancanaan transportasi yang paling populer adalah Model Perancanaan Transportasi Empat Tahap, yang meliputi :
ketersediaan data, waktu perencanaan dan lain-lain. Beberapa alternatif urutan pemodelan seperti ditunjukkan pada gambar 2.2 berikut:
Gambar 2.2 Empat variasi urutan konsep utama
2.3.1 Trip Generation
Trip generation adalah tahapan pertama pemodelan perencanaan transportasi yang memperkirakan jumlah pergerakan yang terjadi, pemodelan ini mencakup berapa jumlah pergerakan yang meninggalkan suatu lokasi atau tata guna lahan dan berapa jumlah pergerakan yang menuju suatu lokasi atau tata guna lahan. Tata guna lahan yang dimaksud dapat berupa pemukiman, pendidikan, perkantoran dan pertokoan. Jumlah dari trip generation seseorang merupakan peubah tidak bebas dari suatu model. Pada trip generation, trip end dapat diklasifikasikan sebagai asal (origin) dan tujuan (destination) atau produksi
(production) dan antraksi (attraction). TG
MS
TD
TA
TG
TA TD - MS
TG
TD
MS
TA TG - MS
TA TD
Trip generation dibagi menjadi 2 yaitu :
1. Bangkitan perjalanan atau pergerakan (trip production)
Bangkitan pergerakan adalah model hubungan yang mengaitkan parameter tata guna lahan dengan pergerakan yang meninggalkan zona. Berdasarkan tujuan pergerakan sering dijumpai bahwa model bangkitan pergerakan mempunyai tujuan yang berbeda, lima kategori tujuan pergerakan yang sering digunakan yaitu :
a. Pergerakan ke tempat kerja
b. Pergerakan ke sekolah atau tempat pendidikan c. Pergerakan ke tempat belanja
d. Pergerakan untuk kepentingan sosial dan rekreasi
2. Tarikan perjalanan atau pergerakan (trip attraction)
Tarikan perjalanan adalah jumlah perjalanan yang mampu ditarik oleh suatu zona, faktor yang mempengaruhi antara lain: jumlah penduduk, lapangan pekerjaan yang tersedia. Tarikan pergerakan untuk manusia yang sering digunakan adalah luas lantai kegiatan industri, komersial, perkantoran, dan pelayanan lainnya.
a. Perjalanan
Pergerakan satu arah dari zona asal ke zona tujuan. Pergerakan yang dimaksud di sini selain pergerakan berkendaraan juga termasuk pergerakan berjalan kaki.
b. Pergerakan berbasis rumah
Pergerakan yang salah satu zona asal atau tujuan tersebut adalah rumah. c. Pergerakan berbasis bukan rumah
Pergerakan yang baik asal atau tujuan adalah bukan rumah. d. Bangkitan pergerakan
Pergerakan bukan rumah yang mempunyai tempat asal atau tujuan adalah rumah atau pergerakan yang dibangkitkan oleh pergerakan berbasis bukan rumah.
e. Tarikan pergerakan
Pergerakan berbasis rumah yang mempunyai tempat asal atau tujuan bukan rumah atau pergerakan yang tertarik oleh pergerakan berbasis bukan rumah. f. Tahapan bangkitan pergerakan
Digunakan untuk menetapkan besarnya bangkitan pergerakan yang dihasilkan oleh rumah tangga pada selang waktu tertentu.
Faktor-faktor yang mempengaruhi : 1. Bangkitan pergerakan untuk manusia
Faktor yang menjadi pertimbangan antara lain : a. Pendapatan
c. Struktur rumah tangga d. Ukuran rumah tangga e. Nilai lahan
f. Kepadatan daerah pemukiman g. Aksesibilitas
Empat faktor pertama (pendapatan, pemilikan kendaraan, struktur dan ukuran rumah tangga) telah dipakai pada beberapa kajian bangkitan pergerakan, sedangkan nilai lahan dan kepadatan daerah pemukiman hanya dipakai untuk kajian mengenai zona.
2. Tarikan pergerakan untuk manusia
Faktor yang sering digunakan adalah luas lantai untuk kegiatan industri, komersial, perkantoran, pertokoan dan pelayanan lainnya. Lapangan kerja juga menjadi faktor yang mempengaruhi tarikan pergerakan.
3. Bangkitan dan tarikan untuk barang
Pergerakan ini julahnya kecil dibandingkan dengan jumlah total pergerakan. Faktor yang mempengaruhi antara lain: jumlah lapangan kerja, jumlah tempat pemasaran, luas atap industri dan total seluruh daerah yang ada.
2.3.2 Trip Distribution
Trip Distribution merupakan tahapan kedua model perencanaan transportasi yang memperkirakan pola sebaran arus lalu lintas antara zona asal i
ke zona tujuan d.
tujuan di dalam daerah tertentu dan selama periode waktu tertentu. Matriks pergerakan atau Matriks Asal-Tujuan (MAT) sering digunakan oleh perencana transportasi untuk menggambarkan pola pergerakan tersebut.
MAT adalah matriks berdimensi dua yang berisi informasi mengenai besarnya pergerakan antarlokasi (zona) di dalam daerah tertentu. Baris menyatakan zona asal dan kolom menyatakan zona tujuan (tabel 2.4), sehingga sel matriksnya menyatakan arus dari zona asal ke zona tujuan. Dalam hal ini, notasi
Tid menyatakan besarnya arus pergerakan (kendaraan, penumpang, atau barang)
yang bergerak dari zona asal i ke zona tujuan d selama selang waktu tertentu. Sel pada diagonal berisi informasi mengenai pergerakan intrazona (i=d). Oleh karena itu:
Tid = pergerakan dari zona asal i ke zona tujuan d Oi = jumlah pergerakan yang berasal dari zona asal i Dd = jumlah pergerakan yang menuju ke zona tujuan d
{Tid} atau T = total matriks
Tabel 2.4 Bentuk umum dari Matriks Asal-Tujuan (MAT)
∑∑
∑
∑
= = = = = = = N i N d id N d d N di D T
O T
1 1
1 1
Sumber: Tamin (1985,1988abcd, 1997a, 2000a)
Zona 1 2 3 … N Oi
1 T11 T12 T13 ... T1N O1
2 T21 T22 T23 ... T2N O2
3 T31 T32 T33 ... T3N O3
. . . . . . . . . . . . ... ... ... . . . . . .
N TN1 TN2 TN3 ... TNN ON
Beberapa kondisi harus dipenuhi, seperti total sel matriks untuk setiap baris i harus sama dengan jumlah pergerakan yang berasal dari zona asal i tersebut (Oi). Sebaliknya, total sel matriks untuk setiap kolom d harus sama dengan jumlah
pergerakan yang menuju ke zona tujuan d (Dd). Kedua batasan ini ditunjukkan
pada persamaan berikut: i
N
d
id O
T =
∑
=1
dan d
N
i
id D
T =
∑
=1
( 2.8 )
Persamaan tersebut dapat juga dinyatakan dengan cara lain. Total pergerakan yang dibangkitkan dari suatu zona i harus sama dengan total pergerakan yang berasal dari zona i tersebut yang menuju ke setiap zona tujuan d. Sebaliknya total pergerakan yang tertarik ke suatu zona d harus sama dengan total pergerakan yang menuju ke zona d tersebut yang berasal dari setiap zona asal i.
2.3.3 Modal split
Modal split merupakan pemodelan yang memperkirakan proporsi dari total perjalanan yang dialokasikan pada variasi pilihan moda. Dalam interaksi dua zona maka seseorang akan melakukan pemilihan terhadap moda apa yang akan digunakan. Dalam hal ini pilihan moda adalah kendaraan pribadi atau kendaraan umum. Jika terdapat banyak moda maka moda yang mempunyai rute terpendek, tercepat dan termurah akan dipilih.
Faktor-faktor yang berpengaruh dalam pemilihan moda adalah : 1. Ketersediaan kendaraan pribadi
2. Pendapatan 3. Tujuan pergerakan
5. Jarak pergerakan 6. Biaya transportasi
2.3.4 Trip assignment
Trip assignment atau pemilihan rute, sama dengan pemilihan moda seseorang akan memutuskan rute mana yang akan diambil. Sama dengan pemilihan moda, pemilihan rute tergantung pada alternatif terpendek, tercepat dan termurah.
Contoh yang umum adalah metode all-or-nothing, dalam hal ini diasumsikan pengendara berusaha memperkecil biaya perjalanannya dan mereka melakukannya dengan cara yang sama sehingga biaya perjalanan tidak tergantung pada jumlah arus lalu lintas. Karena itu, pengendara dari satu zona ke zona lain selalu memakai rute yang sama.
Gambar 2.3 Jaringan sederhana dan waktu tempuh ruas
Gambar 2.3 (Black, 1981) mengilustrasikan metode pembebanan all-or-nothing
(angka pada setiap ruas adalah waktu tempuh dalam menit untuk ruas tersebut). Dapat dilihat bahwa rute tercepat dari zona i ke zona d adalah 1 - 4 - 3. Rute
2
1 4 3
5
(10)
(10)
(10)
(10)
(10) (20)
(20)
(15)
zona d
tercepat dari zona i ke setiap zona lainnya dalam daerah kajian dapat ditentukan, dan kumpulan rute itu disebut pohon dari zona i.
Metode ini merupakan metode tercepat dan termudah serta sangat berguna untuk jaringan jalan yang tidak begitu rapat, yang hanya mempunyai beberapa rute alternatif saja. Nilai peubah pidl untuk metode ini adalah sebagai berikut:
1 jika pergerakan dari zona asal i ke zona tujuan d menggunakan ruas l l
id p
0 jika sebaliknya atau i = d
2.4 Model analisa r egr esi
Terdapat 2 (dua) bentuk dalam model analisa regresi, yaitu : 1. Model analisa regresi-linear
2. Model analisa regresi-linear-berganda
2.4.1 Model analisa r egr esi-linear
Analisa regresi linear adalah metode statistik yang digunakan untuk mempelajari hubungan antar sifat permasalahan yang sedang diselidiki. Model analisa regresi linear dapat memodelkan hubungan antara 2 peubah atau lebih. Hubungan ini secara umum dapat dinyatakan dalam persamaan berikut :
Y = A + BX ( 2.9 )
∑
∑
∑
∑
∑
− ⋅ − = i i i ii i i
i i i i X X N Y X Y X N B 2 2 ) ( ) ( ) ( ) ( ) (
X B Y
A= − ( 2.11 )
dimana :
Y = peubah tidak bebas
X = peubah bebas
A = intersep atau konstanta regresi B = koefisien regresi
Y dan X adalah nilai rata-rata dari Yi dan Xi
Koefisien determinasi (R2)
Koefisien determinasi adalah nilai tingkat kepercayaan. Nilai R2 ini berkisar antara 0 sampai dengan 1. Biasanya nilai tingkat kepercayaan yang dapat dipercaya berkisar antara 0,4 sampai dengan 1.
∑
∑
− − − = i i i Y Y Y Y R 2 2 2 ) ˆ ( ) ˆ (1 ( 2.12 )
dimana :
R = Koefisien determinasi
i Y
Yˆ− = Simpangan tak terdefinisi
Y
Yˆ− = Simpangan terdefinisi
2.4.2 Model analisa r egr esi-linear -ber ganda
Regresi linear berganda merupakan pengembangan dalam peramalan bangkitan pergerakan yang diakibatkan dari beberapa tipe land use.
Y = A + B1 X1 + B2 X2 + B3 X3 + ... + BN XN ( 2.13 )
dimana :
Y = Peubah tidak bebas
X ... X = Peubah bebas A = Konstanta regresi B ... B = Koefisien regresi
Analisa regresi linear berganda adalah suatu metode statistik. Untuk menggunakannya, terdapat beberapa asumsi yang perlu diperhatikan :
1. Varians nilai peubah tidak bebas terhadap garis regresi harus sama untuk semua nilai peubah bebas.
2. Nilai peubah tidak bebas harus tersebar normal atau minimal mendekati normal.
3. Nilai peubah bebas, merupakan nilai yang terukur dan tanpa kesalahan. 4. Nilai dari peubah bebas dengan peubah tidak bebas bersifat linear.
2.5 Alter natif model sebar an per jalanan
Terdapat tiga metode dalam sebaran perjalanan (trip distribution): 1. Metode Konvensional
2. Metode Analogi
Metode analogi didasarkan pada asumsi bahwa MAT di masa yang akan datang merupakan fungsi dari MAT saat ini yang dikalikan dengan suatu faktor pertumbuhan. Bentuk dasar dari metode analogi ini adalah persamaan matematis yang menghubungkan beberapa variabel dan parameter bentukan dari suatu MAT, yakni dengan mengekspansi MAT dasar (yang sebelumnya telah diketahui) dengan suatu faktor pertumbuhan, sebagai berikut:
Tid = tid . E ( 2.14 )
Dimana:
Tid: pergerakan pada masa mendatang dari zona asal i ke zona tujuan d tid : pergerakan pada masa sekarang dari zona asal i ke zona tujuan d E : tingkat pertumbuhan
3. Metode Sintetis
Prinsip yang mendasari metode ini adalah pergerakan dari zona asal ke zona tujuan berbanding lurus dengan besarnya bangkitan lalu-lintas di zona asal dan juga tarikan lalu-lintas di zona tujuan serta berbanding terbalik dengan aksesibilitas (kemudahan) antara kedua zona tersebut.
Model sintetis yang paling populer adalah model gravity yang menganalogikan bahwa fenomena sebaran perjalanan antara zona asal i ke zona tujuan d berbanding lurus dengan jumlah bangkitan Oi dan tarikan Dd dan
berbanding terbalik kuadratis terhadap fungsi hambatan ƒ(Cid) antara kedua
zona tersebut, dalam fungsi matematis adalah sebagai berikut:
Diman:
Tid : pergerakan dari zona asal i ke zona tujuan d Oi : jumlah pergerakan yang berasal dari zona asal i Dd : jumlah pergerakan yang berasal dari zona tujuan d
ƒ(Cid) : fungsi hambatan atau ukuran aksesibilitas antara zona i dengan
zona d
2.6 Model gravity
Model gravity menggunakan konsep gravity yang diperkenalkan oleh Newton pada tahun 1686 yang dikembangkan dari analogi hukum gravitasi. Gaya dapat dianggap sebagai pergerakan antara dua daerah, sedangkan massa dapat digantikan dengan peubah seperti populasi atau bangkitan dan tarikan pergerakan, serta jarak, waktu, atau biaya sebagai ukuran kemudahan (aksesibilitas). Jadi, untuk keperluan transportasi model gravity (GR) dinyatakan sebagai:
2 id
d i id
d O O K
T = ⋅ dengan K adalah konstanta ( 2.16 )
Secara umum, model gravity dapat dinyatakan dalam bentuk persamaan:
Tid = Ai . Oi . Bd . Dd . ƒ(Cid) ( 2.17 )
dimana:
Oi dan Dd : menyatakan jumlah pergerakan yang berasal dari zona i dan yang
berakhir di zona d
Ai dan Bd : adalah konstanta
ƒ(Cid) : fungsi hambatan atau ukuran aksesibilitas antara zona i dengan
Terdapat 4 (empat) jenis model GR, yaitu model gravity tanpa-batasan atau model UCGR (Unconstrained Gravity), model gravity dengan-batasan-bangkitan atau model PCGR (Production Constrained Gravity), model gravity
dengan-batasan-tarikan atau model ACGR (Attraction Constrained Gravity), dan model gravity dengan-batasan-bangkitan-tarikan atau model PACGR (Production Attraction Constrained Gravity). Model PCGR dan ACGR sering disebut model dengan-satu-batasan atau model SCGR (Single Constrained Gravity), sedangkan model PACGR disebut model dengan-dua-batasan atau model DCGR (Double Constrained Gravity).
2.6.1 Model tanpa-batasan (UCGR)
Model ini sedikitnya mempunyai 1 (satu) batasan, yaitu total pergerakan yang dihasilkan harus sama dengan total pergerakan yang diperkirakan dari tahap bangkitan pergerakan. Model ini bersifat tanpa-batasan, dalam arti bahwa model tidak diharuskan menghasilkan total yang sama dengan total pergerakan dari dan ke setiap zona yang diperkirakan oleh tahap bangkitan pergerakan. Model tersebut dapat dituliskan sebagai:
Tid = Oi. Ai . Bd . Dd . ƒ(Cid) ( 2.18 ) Ai = 1 untuk seluruh i dan Bd = 1 untuk seluruh d
2.6.2 Model dengan-batasan-bangkitan (PCGR)
Dalam model ini, total pergerakan global hasil bangkitan pergerakan harus sama dengan total pergerakan yang dihasilkan dengan pemodelan. Begitu juga bangkitan pergerakan yang dihasilkan model harus sama dengan hasil bangkitan pergerakan yang diinginkan, akan tetapi tarikan pergerakan tidak perlu sama. Model ini dapat dituliskan dengan persamaan:
Bd = 1 untuk seluruh d dan Ai =
∑
= ⋅ ⋅ N d id dd D f
B 1
) (
1
untuk seluruh i ( 2.19 )
Dalam model UCGR, nilai Ai = 1 untuk seluruh i dan nilai Bd = 1 untuk
seluruh d. Total pergerakan yang dihasilkan model (t) harus sama dengan total pergerakan yang didapat dari hasil bangkitan pergerakan (T). Selain itu, total pergerakan yang berasal dan setiap zona asal harus selalu sama dengan total pergerakan (yang dibangkitkan) yang diperkirakan oleh tahap bangkitan pergerakan.
2.6.3 Model dengan-batasan-tar ikan (ACGR)
Dalam hal ini, total pergerakan secara global harus sama dan juga tarikan pergerakan yang didapat dengan pemodelan harus sama dengan hasil tarikan pergerakan yang diinginkan. Sebaliknya, bangkitan pergerakan yang didapat dengan pemodelan tidak harus sama. Model ini dapat dituliskan sebagai berikut:
Ai = 1 untuk seluruh i dan Bd =
∑
= ⋅ ⋅ N d id ii O f
A 1
) (
1
Pada model ACGR, konstanta Bd dihitung untuk setiap zona tujuan d.
Konstanta ini memberikan batasan bahwa total ‘kolom’ dari matriks harus sama dengan total ‘kolom’ dari matriks hasil tahap bangkitan pergerakan. Dengan kata lain, total pergerakan hasil pemodelan yang menuju ke suatu zona harus sama dengan total pergerakan hasil bangkitan pergerakan ke zona tersebut.
2.6.4 Model dengan-batasan-bangkitan-tar ikan (PACGR)
Dalam hal ini, bangkitan dan tarikan pergerakan harus selalu sama dengan yang dihasilkan oleh tahap bangkitan pergerakan. Model ini dapat dituliskan dengan persamaan sebagai berikut:
Bd =
∑
= ⋅ ⋅ N d id ii O f
A 1
) (
1
untuk d dan Ai =
∑
= ⋅ ⋅ N d id dd D f
B 1
) (
1
untuk i ( 2.21 )
Kedua faktor penyeimbang (Ai dan Bd)menjamin bahwa total ‘baris’ dan
‘kolom’ dari matriks hasil pemodelan harus sama dengan total ‘baris’ dan ‘kolom’ dari matriks hasil bangkitan pergerakan. Proses pengulangan nilai Ai clan Bd
dilakukan secara bergantian. Hasil akhir akan selalu sama, dari manapun pengulangan dimulai (‘baris’ atau ‘kolom’).
2.7 Kalibr asi model gravity
Salah satu metode yang sering digunakan dalam perhitungan kalibrasi model gravity adalah dengan metode analisa regresi linier. Metode analisa regresi linier dapat digunakan untuk mengkalibrasi parameter model GR yang merupakan suatu fungsi tidak-linier. Secara umum, proses transformasi linier dibutuhkan untuk mengubah fungsi tidak linier menjadi fungsi linier. Selanjutnya, metode analisa regresi akan digunakan untuk mengkalibrasi parameter model yang tidak diketahui (Gunawan, 1995; Tamin, 1988, 1997a, 2000a).
2.8 Fungsi hambatan
Fungsi hambatan sebagai salah satu variabel utama dalam fungsi sebaran pergerakan merupakan ukuran aksesibilitas (kemudahan) antar zona i dan zona d. Hyman (1969) menyarankan tiga jenis fungsi hambatan yang dapat digunakan dalam model gravity (GR), yaitu:
1. f(Cid)=Cid−β fungsi pangkat ( 2.22 )
2. Cid
id e
C
f( )= −β fungsi eksponensial-negatif ( 2.23 )
3. Cid
id
id C e
C
f( )= −β ⋅ −β fungsi Tanner ( 2.24 )
Dimana : Cid = aksesibilitas antara zona i ke zona d
β = parameter fungsi aksesibilitas
2.8.1 Fungsi hambatan pangkat
Bentuk umum model gravity yang mempunyai fungsi hambatan pangkat dapat dinyatakan dengan persamaan berikut:
( )
−β ⋅ ⋅ ⋅ ⋅= i d i d id
id A B O D C
d i d i id id D O B A T C ⋅ ⋅ ⋅ =
−β ( 2.26 )
⋅ ⋅ ⋅ = − d i d i id e id e D O B A T C log
log β ( 2.27 )
(
i d i d)
e id e id
eC = T − A ⋅B ⋅O ⋅D
−βlog log log ( 2.28 )
(
i d i d)
e ide id
eT log A B O D log C
log = ⋅ ⋅ ⋅ −β ( 2.29 )
Dengan melakukan transformasi linier, persamaan tersebut, disederhanakan dan ditulis kembali sebagai persamaan linier Yi = A+BXi dengan mengasumsikan
i id
eT =Y
log dan logeCid = Xi.
Dengan mengetahui informasi [Tid] dan [Cid], maka dengan menggunakan
analisa regresi-linier parameter A dan B dapat dihitung dan dihasilkan beberapa nilai sebagai berikut: B =−β dan A = loge (Ai . Bd . Oi . Dd).
(
)
( ) ( )
( )
( )
∑
∑
∑
∑
∑
= = = = = − ⋅ − = N i N i i N i N i N i Xi X N Yi Xi Yi Xi N B 1 2 1 21 1 1
.
X B Y
A= − ⋅
Y dan X adalah nilai rerata dari Yidan Xi.
Nilai Ai dan Bd ditentukan sesuai dengan jenis batasan model gravity yang
diinginkan (tanpa-batasan, bangkitan, tarikan, atau batasan-bangkitan-tarikan).
2.8.2 Fungsi hambatan eksponensial negatif
(
id)
d i d i
id A B O D C
T = ⋅ ⋅ ⋅ ⋅exp−β ( 2.30 )
(
)
d i d i id id D O B A