STUDI POLA-GERAK CARRIER PADA RENCANA
IRADIATOR GAMMA SERBA-GUNA
Achmad Suntoro
Pusat Rekayasa Perangkat Nuklir – BATAN, E-mail : [email protected]
ABSTRAK
STUDI POLA-GERAK CARRIER PADA RENCANA IRADIATOR GAMMA SERBA-GUNA. ebuah studi pola-gerak carrier iradiator gamma serba-guna telah dilakukan. Hasil studi ini dapat digunakan sebagai bahan pertimbangan dalam menentukan pola gerak pada iradiator gamma serba guna yang sedang didisain. Karakteristik pola gerak kontinyu dan diskrit dibahas menggunakan parameter dimensi bangunan & instalasi yang telah direncanakan. Variasi waktu ekspose menjadi sentral issue dalam pembahasan sehubungan dengan kemungkinan pola-gerak yang bisa dijalankan dan jumlah carrier yang bergerak bersamaan. Pola-gerak diskrit menggunakan 9 tempat pemberhentian, 18 carrier dalam operasi, dan 5 carrier maksimum bergerak bersamaan memberikan waktu ekspose tercepat 27 menit untuk kecepatan carrier 7 meter/menit. Waktu ekspose dapat diperkecil dengan menggunakan kecepatan carrier tetap dengan menambah jumlah carrier yang bergerak secara bersamaan.
Kata kunci: pola-gerak carrier, iradiator gamma, waktu ekspose, gerak diskrit.
ABSTRACT
A CARRIER MOVEMENTS STUDY OF PLANNED GENERAL PURPOSE GAMMA IRRADIATOR. A study on carrier movement of general purpose gamma irradiator has been conducted. The result of the study can be used to consider in deciding the movement pattern of the general purpose gamma irradiator being designed. The characteristics of continuous and discrete movement of carriers are discussed using parameters of the building installation being designed. The exposed time variation becomes the central issue of the discussion in relation to the possibilities of carrier movements and number of carriers in motion. A discrete movement having 9 carrier stoppers, 18 carriers in operation, and maximum 5 carriers moving at the same time give exposed time 27 minutes for the carrier speed 7 meters/minute. The exposed time can be reduced for the carrier speed constant by increasing the number of carriers in motion at the same time. Keyword: carrier movement pattern, gamma irradiator, eksposed time, discrete movement.
PENDAHULUAN
akta menunjukkan bahwa kecenderungan jumlah industri pengguna iradiator gamma untuk pengawetan terus meningkat dari waktu ke waktu. Saat ini ada sekitar 170 fasilitas iradiator gamma di dunia yang tersebar di lebih dari 40 negara[1]. Negara Asia yang telah menggunakan-nya adalah China, Korea, Jepang, Bangladesh dan Thailand. Di Indonesia hanya ada satu fasilitas iradiator gamma untuk tujuan industri yang berlokasi di Bekasi, dan satu iradiator gamma lagi yang digunakan untuk tujuan penelitian yang berlokasi di Pasar Jum’at - Jakarta Selatan. Angka estimasi dari FAO, sekitar 25% pangan/hasil-pertanian rusak akibat serangga, bakteri dan binatang lainnya setelah panen[1], serta 40% buah-buahan dan sayuran di China rusak sebelum sampai ke tempat penjualan (pasar)[2]. Fakta-fakta tersebut
telah membuka prospek masa depan penggunaan iradiator gamma sebagai alat pengawet pangan/ hasil-pertanian.
Secara umum ada dua jenis iradiator gamma yang sering digunakan di dunia industri untuk keperluan pengawetan dan sterilisasi, yaitu operasi iradiator di dalam kolam dan di atas permukaan kolam[3]. Gambar 1 memperlihatkan kedua jenis iradiator gamma tersebut. Untuk iradiator jenis pertama, sumber radioaktif iradiator tersebut selalu disimpan di dalam kolam, dimana obyek yang akan di-iradiasi dimasukkan ke dalam kolam. Untuk jenis iradiator yang kedua, obyek yang di-iradiasi diletakkan di atas kolam setelah sumber radioaktif dinaikkan ke atas permukaan, dan kolam hanya untuk penyimpan sumber radioaktif jika iradiator tidak beroperasi.
a. Tipe-1: iradiasi di dalam kolam. b. Tipe-2: iradiasi di atas kolam
Gambar 1. Dua jenis iradiator untuk industri yang sering digunakan[3].
Sebuah instalasi iradiator gamma serba-guna direncanakan untuk dibangun. Kata serba-guna dalam hal ini mengandung pengertian umum bahwa iradiator tersebut akan bisa digunakan untuk bermacam jenis obyek dan bermacam tujuan iradiasi. Setiap jenis kegiatan iradiasi memerlukan dosis radiasi yang berbeda-beda. Karena radiasi bisa dimanfaatkan untuk keperluan sterilisasi, peng-awetan bahan pangan serta pencegahan pertunas-an[2]. Untuk tujuan serba-guna tersebut dua hal pokok yang harus dipenuhi, yaitu fleksibilitas pola bangunan fisik dan fleksibilitas kemampuan
iradiator untuk memungkinkan obyek yang di-iradiasi mendapatkan dosis radiasi bervariasi. Batasan pertama menentukan variasi dimensi fisik (ukuran) dari obyek yang akan di-iradiasi, dan batasan kedua menentukan jenis obyek & tujuan yang dapat di-iradiasi. Gambar 2 adalah lay-out bangunan dan instalasi jalur gerak obyek yang akan di-iradiasi[4]. Lay-out ini menjadi batasan pertama dari iradiator serba-guna yang direncanakan akan dibangun, yaitu menggunakan tipe-2 dari Gambar 1. Detail batasan dimensi fisik obyek yang dapat di-iradiasi dijelaskan di[4].
Dalam disain ini carrier adalah kerangka pembawa berisi obyek yang akan di iradiasi dan bergerak masuk/keluar ruang iradiasi. Pada lay-out Gambar 2, carrier digantungkan pada rel penggantung dan ditarik oleh rantai yang bergerak melingkar-tertutup mengitari sumber radioaktif. Dalam operasinya rantai selalu bergerak. Pergerakan rantai diatur oleh sebuah motor listrik yang dapat diatur kecepatan putarannya, sehingga kecepatan gerak carrier dapat diatur. Mekanisme gerakannya adalah bahwa carrier akan selalu bergerak (ditarik rantai) dan hanya berhenti ditempat pemberhentian atau jika menabrak/terhalang oleh carrier lain didepannya. Carrier yang berhenti akan kembali bergerak dari tempat pemberhentian oleh sinyal dari sistem kendali gerak, dan untuk carrier yang berhenti tidak di tempat pemberhentian akan kembali bergerak setelah carrier didepannya pergi. Dari mekanisme gerak ini, jumlah dan lokasi tempat pemberhentian sangat mempengaruhi waktu keberadaan obyek (waktu ekspose) di ruang radiasi.
Ada empat tempat pemberhentian dengan lokasi tetap dan tidak boleh diubah, yaitu pemberhentian A & B untuk proses loading dan
unloading obyek, dan pemberhentian C & D untuk
syarat keamanan operasi, seperti terlihat pada Gambar 2. Tempat pemberhentian tambahan dapat dilakukan di luar yang empat tersebut. Jumlah dan lokasi tempat pemberhentian dapat dipilih bebas dan dapat digunakan untuk menyesuaikan persyaratan operasi iradiator yang diinginkan.
Dalam disain menggunakan lay-out Gambar 2 ini, telah ditetapkan bahwa pendekatan per-hitungan dosis yang diserap oleh obyek hanya ketika obyek berada di daerah aktif perhitungan. Di luar daerah aktif perhitungan dosis serap radiasi diabaikan. Jumlah carrier/obyek di daerah aktif perhitungan adalah 11 dengan kombinasi posisi 4-3-4 seperti pada Gambar 2. Oleh karena itu, waktu ekspose efektif sebuah obyek yang di-iradiasi adalah waktu ketika obyek tersebut melalui daerah aktif perhitungan tersebut.
Dosis radiasi yang diserap oleh suatu bahan dapat ditentukan menggunakan persamaan berikut[5]: Rad/jam r A(i) Γ = N 1 = i i2
∑
f Dose (1)Γ : faktor gamma yang besarnya 3.32 untuk sumber Cs 137.
F : faktor konversi dari paparan ke dosis.
A(i) : aktifitas sumber pada lokasi i dalam Curie ri : jarak titik sumber ke obyek dalam meter.
Persamaan (1) menyatakan bahwa dosis radiasi yang diserap oleh obyek tergantung dari besar aktifitas sumber, jarak ke sumber, dan waktu ekspose. Oleh karena itu, batasan kedua sebagai iradiator gamma serba-guna adalah bahwa sistem iradiator harus fleksibel aplikasinya terhadap waktu ekspose dan atau nilai aktifitas sumber radioaktif yang digunakan, karena jarak obyek ke sumber radioaktif sudah tetap yaitu mengikuti pola lintasan seperti pada Gambar 2.
Dalam makalah ini dibahas bagaimana pengaturan waktu ekspose dapat dilakukan pada
layout bangunan yang telah ditetapkan tersebut,
yaitu dengan melihat kemungkinan karakteristik pola geraknya. Akan diperlihatkan pengaruh lokasi dan jumlah tempat pemberhentian terhadap waktu ekspose sebuah obyek di daerah aktif perhitungan. Batas tercepat waktu ekspose tersebut akan ikut menentukan batasan jenis obyek yang memerlukan dosis radiasi rendah yang dapat di-iradiasi. Batasan jenis obyek ini sesungguhnya juga ditentukan oleh nilai aktifitas sumber yang digunakan, tetapi fleksibilitas penggunaan sumber radiasi akan dibahas terpisah di luar makalah ini.
TATA KERJA
Mekanisme pola gerak untuk mengatur gerakan carrier dapat dilakukan dengan
menempatkan tempat-tempat pemberhentian dan halangan carrier didepannya, di luar dua hal tersebut carrier akan selalu bergerak mengikuti gerakan rantai penarik carrier. Pengendalian gerak melalui tempat pemberhentian dapat dilakukan secara sentralisasi, yaitu sentral pengendali akan memberikan sinyal untuk tetap berhenti atau harus bergerak kepada carrier yang ada di tempat-tempat pemberhentian, sedangkan pengendalian dengan halangan carrier akan berjalan sesuai dengan situasi di tempat saat itu (desentralisasi) dimana sentral pengendali tidak dapat mengendalikan gerakannya. Pola gerak sentralisasi hanya cocok untuk jenis obyek yang memerlukan waktu ekspose tinggi dimana gerakan tiap carrier benar-benar dikendalikan oleh satu sentral pengendali sesuai dengan algoritma pengendalian yang dipilih[6].
Gabungan mekanisme gerak pada sentralisasi dan desentralisasi diaplikasikan pada disain gerak untuk iradiator pada Gambar 2. Dengan mekanisme gerak gabungan tersebut, maka lokasi dan jumlah tempat pemberhentian akan mempengaruhi waktu ekspose sebuah obyek di daerah aktif perhitungan. Akan ditinjau karakteristik pola-gerak kontinyu (empat tempat pemberhentian) dan pola-gerak diskrit (lebih dari empat tempat pemberhentian).
Disebut kontinyu karena carrier akan selalu bergerak kontinyu selama di ruang radiasi, dan diskrit karena carrier akan pernah berhenti dengan perioda tertentu di ruang radiasi.
Pola-Gerak Kontinyu
Gambar 3 adalah pola-gerak kontinyu menggunakan 4 tempat pemberhentian. Ada dua kemungkinan operasi menggunakan gerak kontinyu ini, yaitu operasi-penuh (Gambar 3.a) dan operasi dengan carrier se-adanya yang tersedia (Gambar 3.b). Untuk operasi-penuh, jumlah carrier adalah sebanyak isian rentetan sepanjang rantai penggerak kecuali pada daerah A-B (untuk unloading/loading obyek). Operasi dengan carrier se-adanya menggunakan jumlah carrier lebih sedikit dari operasi-penuh. Dua parameter yang menjadi perhatian dari pola-gerak kontinyu ini, yaitu waktu ekspose di daerah aktif perhitungan dan waktu
unloading/loading obyek. Parameter kedua perlu
dicermati mengingat proses unloading/loading obyek nantinya akan dilakukan secara manual oleh para pekerja di instalasi iradiator sehingga batasan waktu kerja bagi mereka harus dalam batas kemampuan kecepatan kerja mereka.
Waktu ekspose obyek dengan pola-gerak kontinyu ini hanya ditentukan oleh kecepatan dan panjang lintasan daerah aktif perhitungan, karena
carrier bebas bergerak dari tempat pemberhentian D
menuju ke C. Hukum mekanika klasik benda bergerak dengan kecepatan tetap dapat diberlakukan untuk menentukan waktu ekspose obyek dan waktu
unloading/loading obyek. Untuk kecepatan gerak carrier (V) dan panjang lintasan daerah aktif
perhitungan (Srad), maka waktu ekspose (trad) dapat dihitung dengan persamaan berikut :
trad = Srad
V (2)
Waktu unloading/loading obyek untuk operasi-penuh dihitung dengan persamaan (3) dan untuk operasi dengan jumlah carrier se-adanya dengan persamaan (4) berikut:
A-B _1 d load/unloa V S < t( ) (3) C V t total A -B _1 d load/unloa _2 d load/unloa ⋅ S + < t( ) ( ) (4)
dimana SA-B jarak antara pemberhentian A ke B, S B-A panjang lintasan dari tempat pemberhentian B ke
A melalui jalur sumber, dan Ctotal jumlah carrier
yang beroperasi.
Pola-gerak kontinyu memerlukan motor penggerak berdaya besar, karena dalam waktu bersamaan semua carrier kecuali yang sedang dalam proses unloading/loading bergerak ditarik oleh rantai penarik carrier. Operasi dengan carrier se-adanya bisa menurunkan beban motor, tetapi membuat tidak efisien penggunaan radiasi, karena bisa terjadi kekosongan di daerah aktif perhitungan. Pola-Gerak Diskrit
Pola-gerak diskrit ditandai dengan adanya keharusan berhenti bagi carrier yang melintas di daerah aktif perhitungan, karena ada tiga tempat pemberhentian dipasang di daerah tersebut yaitu E,
F dan G pada Gambar 4. Penempatan tempat
pemberhentian di daerah aktif-perhitungan tersebut bertujuan agar penggunaan radiasi menjadi efisien meskipun jumlah carrier yang digunakan tidak sebanyak pola-gerak kontinyu dengan operasi-penuh. Konsekuensinya adalah waktu ekspose gerak diskrit ini menjadi lebih lama dibanding dengan waktu ekspose pola-gerak kontinyu. Lamanya waktu ekspose pola-gerak diskrit ditentukan oleh lintasan antar tempat pemberhentian terpanjang dalam sistem gerak tersebut. Lintasan dari pemberhentian D ke G adalah lintasan terpanjang penentu waktu ekspose untuk disain iradiator dengan pola seperti pada Gambar 4.a.
Panjang lintasan ini dapat diperpendek dengan menambah tempat pemberhentian di antara lintasan yang panjang tersebut. Dari Gambar 4.a, ada dua lintasan yang panjang yang perlu diperhatikan, yaitu D-G dan E-C. Untuk memperpendek waktu ekspose perlu ditambah dua tempat pemberhentian di antara dua lintasan panjang tersebut, yaitu H dan I seperti pada Gambar 4.b.
Namun demikian, penambahan jumlah tem-pat pemberhentian akan menambah jumlah carrier yang bergerak disamping memperpendek waktu ekspose. Jumlah carrier yang bergerak bersamaan menentukan kapasitas daya motor penggerak rantai penarik carrier. Optimasi perlu dilakukan dalam disain untuk menentukan titik temu antara biaya operasi motor dan waktu ekspose yang diperlukan.
Gambar 5. Algoritma gerak untuk Gambar 4a.
Gambar 5a memperlihatkan arah lintasan
carrier dan Gambar 5b diagram waktunya, sehingga
terlihat jumlah carrier yang bergerak secara bersamaan. Awal operasi ditandai dengan bergeraknya carrier di D dan E menelusuri lintasan berturut-turut a dan b menuju G dan C. Bergeraknya dua carrier tersebut menyebabkan
carrier 1 dan 2 juga bergerak, tetapi carrier 1 akan
berhenti setelah sampai di D dan carrier 2 berhenti setelah sampai di E. Bergeraknya carrier 2 menyebabkan carrier 3 bergerak dan akan berhenti ketika menabrak carrier di depannya. Kondisi ini diikuti hingga carrier 4 bergerak yang
menyebabkan kosongnya tempat carrier 4 dan sistem kendali memerintahkan carrier di F bergerak menelusuri jalur c menuju tempat kosong carrier 4. Demikian seterusnya carrier bergerak mengikuti
diagram waktu Gambar 5b hingga terjadi kembali seperti gerakan awal. Kondisi ini disebut satu siklus gerakan.
Terlihat bahwa dalam satu siklus gerakan bahwa carrier di jalur a menentukan waktu siklus, karena jalur a adalah jalur terpanjang. Waktu ekspose sebuah carrier di daerah aktif perhitungan adalah dimulai ketika carrier berada di posisi
carrier 10 hingga meninggalkan posisi E. Setiap
langkah gerak carrier dari satu tempat ke tempat didepannya harus menjalani satu siklus. Untuk tujuan memperpanjang waktu ekspose, sistem pengendali dapat memberi delay waktu (delta) antara siklus satu dan berikutnya sehingga total waktu ekspose dapat diperpanjang. Gambar 6 adalah hubungan siklus dengan waktu ekspose lengkap dengan sisipan waktu delay (delta).
Panjang jalur di Gambar 5.a yang ditulis dengan huruf abjad a s/d f identik dengan waktu yang diperlukan untuk menjalani jalur tersebut, dan N adalah waktu yang diperlukan untuk gerakan pindah tempat menggantikan carrier yang pergi (terjadi di daerah aktif perhitungan dan tempat pemberhentian
D dan C), maka dari eksperimen (simulasi)
diperoleh persamaan berikut:
Waktu ekspose di G : 3 a + 7 N + 3 delta Waktu ekspose di F : 3 a – 3 N – d + 3 delta Waktu ekspose di E : 4 a – 4 N – c + 4 delta + Waktu ekspose di daerah aktif perhitungan : 10 a
– c – d + 10 delta (5) Diagram waktu Gambar 5b menunjukkan bahwa jumlah carrier yang bergerak dalam waktu bersamaan berjumlah rata-rata 4 carrier dan maksimum (pernah terjadi) 5 carrier. Persamaan (5) menunjukkan bahwa jalur a sangat dominan. Akan dicoba memperpendek jalur a dengan menambah tempat pemberhentian I dan juga memperpendek jalur b dengan tempat pemberhentian H. Jalur a dan
b dapat diperpendek dan tidak mengganggu
algoritma gerak karena bersamaan dengan carrier di
E dan I bergerak, carrier di D dan H juga bergerak.
Gambar 7 adalah algoritma gerak dengan tambahan
2 tempat pemberhentian tersebut (pola-gerak Gambar 4b).
Dari Gambar 7b terlihat bahwa jumlah
carrier yang bergerak rata-rata 5 dan tidak pernah
melebihi angka tersebut. Waktu satu siklus masih didominasi oleh jalur a, tetapi jalur a disini lebih pendek dari jalur a pada Gambar 5b. Sehingga dipastikan bahwa waktu ekspose di daerah aktif perhitungan akan lebih pendek. Penempatan lokasi tempat pemberhentian H dan I dibuat sedemikian sehingga jumlah carrier yang bergerak bersamaan tidak melebihi dari 5 carrier.
Dengan cara yang sama, algoritma pada Gambar 7 secara eksperimen (simulasi) menghasil-kan persamaan berikut:
Waktu ekspose di G : 3 a + 9 N + 3 delta Waktu ekspose di F : 3 a – 3 N – d + 3 delta Waktu ekspose di E : 4 a – 6 N – c + 4 delta + Waktu ekspose di daerah aktif perhitungan : 10 a
– c – d + 10 delta (6)
Persamaan (6) tepat sama dengan persamaan (5) meskipun berasal dari pola gerak yang berbeda jumlah tempat pemberhentian.
HASIL DAN BAHASAN
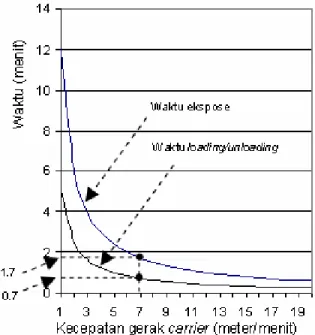
Dengan menggunakan persamaan (2) dan (3) serta menggunakan parameter dimensi bangunan dan instalasi Gambar 3, diperoleh grafik waktu ekspose dan waktu loading/unloading (Gambar 8) sebagai fungsi kecepatan gerak carrier untuk gerak kontinyu. Waktu loading /unloading untuk jumlah
carrier se-adanya lebih besar dari waktu loading /unloading operasi-penuh pada grafik tersebut.
Dari Gambar 8 terlihat bahwa kecepatan ekspose yang singkat diikuti dengan singkatnya waktu loading/unloading. Kondisi ini perlu menjadi pertimbangan untuk menentukan batas tercepat waktu ekspose, mengingat proses loading/unloading dilakukan secara manual oleh operator iradiator. Untuk kecepatan carrier 7 meter/menit, waktu ekspose adalah 1,7 menit dan waktu loading/
unloading 0, 7 menit.
Gambar 8. Waktu ekspose dan waktu loading/ unloading gerak kontinyu.
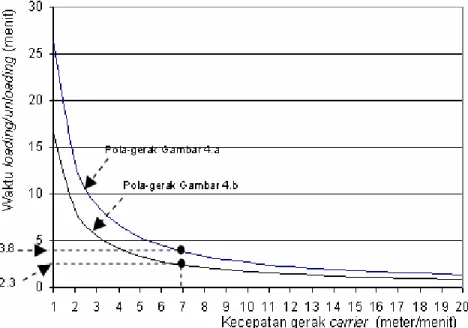
Hal serupa dilakukan untuk persamaan (5) atau (6) dan diperoleh grafik Gambar 9, yaitu waktu ekspose sebagai fungsi dari kecepatan gerak carrier untuk gerak diskrit. Pola kedua grafik itu sama karena mempunyai bentuk persamaan matematis yang sama, tetapi berbeda pada nilai parameter a dan b. Perbedaan nilai parameter antara persaman (5) dan (6) adalah sebagai berikut:
a(5) = a(6) + x (7) b(5) = b(6) + y (8) dimana a(5) adalah a dari persamaan (5), dan a(6) adalah a dari persamaan (6). Nilai b meskipun diubah tidak mempengaruhi waktu ekspose, tetapi jika b tidak diubah maka persamaan (6) tidak akan berbentuk seperti tersebut. Perubahan b diatur sedemikian rupa sehingga nilai b(6) < a(6) sehingga persamaan (6) tetap berlaku. Nilai x dan y adalah potongan jarak akibat pemendekan jarak a dan b.
Untuk kecepatan carrier 7 meter/menit, waktu ekspose tercepat untuk pola-gerak Gambar 4a adalah 41,7 menit dengan waktu loading/unloading 3,8 menit, dan untuk pola-gerak Gambar 4.b adalah 27,6 menit dengan waktu loading/unloading 3.8 menit. Terjadi penurunan waktu ekspose 14 menit dan 1.5 menit untuk waktu loading/unloading pada penambahan 2 tempat pemberhentian dari Gambar 4.a ke 4.b dengan jumlah maksimum carrier yang
bergerak bersamaan tetap 5 carrier. Penurunan waktu ekspose bisa dilakukan lagi dengan cara yang sama, tetapi berakibat jumlah tempat pemberhentian dan carrier yang bergerak bersamaan akan meningkat. Gambar 10 adalah grafik waktu
loading/unloading dari Gambar 9.
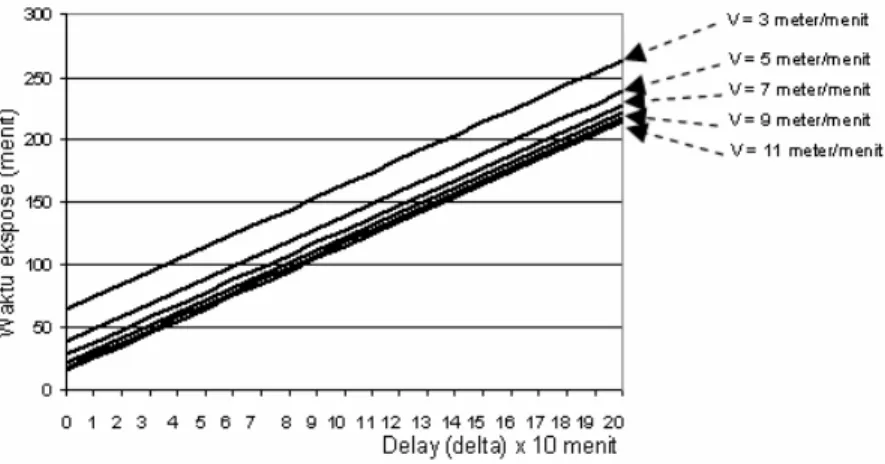
Pada pola-gerak diskrit, untuk memper-panjang waktu ekspose digunakan delay seperti yang ditunjukkan pada Gambar 6 dan 7.c atau persamaan (5) dan (6). Pada kecepatan gerak carrier 3, 5, 7, 9, dan 11 meter/menit untuk pola-gerak Gambar 4.b, diperoleh grafik linier waktu ekspose seperti pada Gambar 11. Memperpanjang waktu ekspose dilakukan dengan memperbesar delay (delta).
Dari semua grafik waktu ekspose dan
loading/unloading menunjukkan bahwa adanya titik
belok efektifitas terhadap kecepatan carrier, yaitu terjadi pada kecepatan 7 meter/menit. Kecepatan
carrier di atas 7 meter/menit tidak banyak
mengubah waktu ekspose di daerah aktif perhitungan. Oleh karena itu dalam makalah ini kecepatan 7 meter/menit selalu dipakai sebagai acuan numerik yang ditampilkan pada gambar grafik yang ada. Disamping itu, dari komunikasi pribadi penulis dengan operator iradiator gamma untuk industri di Bekasi, diketahui bahwa kecepatan gerak carrier 7 meter/menit adalah kecepatan normal yang biasa mereka gunakan untuk berat
carrier 100 kg.
Gambar 11. Delay (delta) memperpanjang waktu ekspose.
KESIMPULAN
Karakteristik dua pola-gerak (kontinyu dan diskrit) untuk bangunan instalasi iradiator gamma serba-guna yang direncanakan telah dibahas. Untuk obyek yang memerlukan dosis radiasi sangat rendah dapat menggunakan pola-gerak kontinyu dengan se-adanya carrier, tetapi kondisi ini tidak efisien dalam penggunaan radiasi sumber. Kompromi dengan penurunan nilai sumber yang digunakan akan lebih baik sehingga pola-gerak diskrit dapat digunakan untuk obyek yang memerlukan dosis radiasi rendah. Pola-gerak diskrit dengan 9 tempat pemberhentian dan menggunakan 18 carrier dalam operasinya dapat menghasilkan waktu ekspose tercepat 27 menit dengan jumlah carrier maksimum yang bergerak secara bersamaan 5 carrier. Pola-gerak ini perlu mendapatkan pertimbangan karena jika dilengkapi dengan fasilitas pengurangan nilai aktifitas radioaktif akan dapat memiliki daerah kerja waktu ekspose yang cukup lebar, karena untuk memperpanjang waktu ekspose dapat juga dengan mudah menambah waktu delay atau obyek harus bergerak menjalani lebih dari satu putaran iradiasi.
UCAPAN TERIMA KASIH
Penulis sangat berterima kasih kepada team proyek iradiator gamma 2009 dan 2010, karena bekerja sama dengan mereka tulisan ini bisa terwujud.
DAFTAR PUSTAKA
1. ICGFI., Fact about Food Irradiation., Vienna, Austria 1999., www.iaea.org/programmes/
nafa/d5/public/foodirradiation.pdf. di-access tanggal 19 Februari 2009.
2. THAMRIN MT dan AKHADI M., Dosimetri
Gamma Dosis Tinggi dalam kegiatan Industri,
Buletin ALARA, Vol. 1, No. 2, P. 27-33, Desember 1997.
3. USNRC., Commercial Irradiators, Fact Sheet., April 2009., www.nrc.gov/reading-rm/doc-collections/fact-sheets/commercial-irradiators. pdf ., di access Mei 2010.
4. PUDJIJANTO, Rancang bangun dan Analisis
Keselamatan Radiasi Iradiator Gamma Guna Pengawetan dan Penyucihamaan Piranti Medis, Laporan Teknis, PRPN-BATAN, 2009.
5. DINALLO, A M, et.al., Dosimetry in
Radio-graphy Vol.1., Proceedings of an International
Symposium on Dosimetry in Radioterapy., IAEA., Vienna., 1988.
6. SUNTORO A., Analisis Pola-Gerak Carrier
BG-09 pada Iradiator Gamma Tipe Kolam,
Publikasi Ilmiah., Pertemuan dan Presentasi Ilmiah KIM., PPI-KIM LIPI., 2010.
TANYA JAWAB
Darsono− Apakah diperhitungkan faktor menurunnya aktivitas gamma terhadap laju konveyor.
− Dari dua pola gerak ini yang mana yang akan digunakan.
Achmad Suntoro
− Divisi proses telah memperhitungkan adanya
peluruhan dari sumber, sehingga divisi tersebut akan memberikan masukan parameter kecepatan gerak carrier untuk mendapatkan dosis yang tepat.
− Pola gerak diskrit akan diteruskan/dipilih untuk
dibuat disain dasarnya.
Jumari
− Apakah sudah diperhitungkan keselamatan bagi pekerja radiasi maupun bukan pekerja radiasi?
Achmad Suntoro
− Proyek pembuatan disain dasar iradiator gamma
ini mempunyai organisasi multidisiplin keilmuan. Diantaranya bidang ilmu keselamatan yang ditampung dalam divisi keselamatan radiasi. Sehingga keselamatan radiasi bagi pekerja telah diperhitungkan.
![Gambar 2. Lay-out bangunan dan instalasi iradiator dalam disain [4] .](https://thumb-ap.123doks.com/thumbv2/123dok/4166262.2837742/2.918.208.762.92.374/gambar-lay-out-bangunan-instalasi-iradiator-dalam-disain.webp)