SIMULASI PENGENDALIAN LEVEL STEAM DRUM
DENGAN PENGENDALI PID BERBASIS FUZZY GAIN
SCHEDULING
Imam Abadi1
ABSTRACT
Steam is regarded as the main process in most industries, especially petrochemical industries. Hence, the availability and quality of steam are considered as key factors in quality assurance. Steam drum, which produce steam, will be able to produce good steam when all of significance variables in its process are in a stable condition. One of the most influence variables that affect the quality of the steam is water level on the steam drum. For that reason, in this research, we simulated control design of the steam drum level using Fuzzy algorithms with gain-tuning PID controllers as Kp, Ki and Td. When the set point is 50%, the simulation results show that the steam drum level is very good, with performance index as follows; max overshoot 0.12%, settling time 272 seconds, and steady state error 0.48%.
Keywords: fuzzy, gain scheduling PID, steam drum, level ABSTRAK
Sebagian besar proses industri, terutama industri petrokimia, dalam kelangsungan prosesnya sangat bergantung pada steam sebagai kebutuhan utama proses produksi. Oleh karena itu ketersediaan dan kualitas steam menjadi faktor penentu dalam menjamin kualitas produksi. Steam drum sebagai salah satu mesin penghasil steam, akan mampu memproduksi steam dengan baik apabila variabel - variabel proses penting di dalamnya berada pada kondisi stabil. Salah satu variabel proses yang paling berpengaruh terhadap kualitas steam adalah level air pada steam drum. Untuk itu pada penelitian ini, disimulasikan suatu pengendalian level pada steam drum dengan menerapkan Algoritma fuzzy dalam melakukan tuning gain-gain pengendali PID seperti Kp, Ki, dan Td. Hasil simulasi menunjukkan bahwa respon keluaran level steam drum sangat baik, dengan index performansi max overshoot, settling time dan error steady state masing- masing 0,12%, 272 detik, dan 0,48% ketika setpointnya 50%.
Kata kunci: fuzzy, gain scheduling PID, steam drum, level
1
Jurusan Teknik Fisika – FTI – ITS Surabaya, Kampus ITS Keputih Sukolilo. Surabaya 60111, E-mail: [email protected]
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 220
1. PENDAHULUAN
Pada proses industri khususnya petrokimia atau pupuk, untuk memproduksi asam sulfat, amonia maupun urea, salah satu kebutuhan utamanya adalah steam. Steam tersebut dapat dihasilkan oleh unit -unit pembangkit steam seperti Package Boiler, Steam drum dan lain-lain yang berfungsi mengubah feed water yang masih berupa fasa cair menjadi uap atau
steam.
Salah satu faktor dominan untuk mendapatkan steam yang berkualitas adalah level fluida cair pada drum. Hal ini disebabkan level air pada drum secara langsung turut mempengaruhi temperatur, tekanan steam yang diinginkan. Oleh sebab itu maka leveldi dalam steam drum tersebut harus tetap dijaga. Apabila level air pada steam drum terlalu tinggi akan mengakibatkan
carry-over yang bisa menimbulkan kerusakan pada turbin. Untuk menghindari carry-over yang berlebihan, maka feed water harus dihentikan secaratotal. Keadaan ini, tentu dapat mengganggu proses produksi steam pada
steam drum. Sedangkan jika level rendah yang artinya jumlah air pada drum berkurang sedangkan pemanasan tetap konstan, maka tekanan akan berubah tinggi dan jika dibiarkan terus menerus bisa menyebabkan terjadinya ledakan. Untuk mempertahankan agar level air pada drum sesuai dengan keinginan, perlu dilakukan pengendalian terhadap variabel ini secara otomatis sehingga tidak menghambat proses selanjutnya.
Beberapa peneliti sebelumnya telah melakukan penelitian pada plant yang sama yakni steam drum atau boiler
diantaranya (Winarno, 1999) yaitu pengendalian tekanan pada boiler
dengan controller PID plus compensator, (Herawaty, 2002) pengendalian level pada boiler dengan KLF (kontrol logika fuzzy) statis, (Rachmawardani, 2003, dan Kosko, 1992) pengendalian level pada boiler dengan neural network controller. Berdasar hasil penelitian, bisa diketahui bahwa kualitas steam yang dihasilkan sangat bergantung pada pengendalian variabel-variabel proses yang paling sensitif, seperti level dan tekanan serta ketangguhan dalam mengatasi gangguan yang bersifat internal yakni proses plant dan eksternal yaitu lingkungan. Kelemahan yang ditemukan pada hasil penelitian sebelumnya adalah respon keluaran sistem yang masih cukup lama untuk mencapai titik stabil dan eror yang masih besar.
Untuk itu dalam penelitian ini, dirancang suatu sistem pengendalian berbasis pengendali PID fuzzy gain schedulling yang diharapkan mampu menghasilkan respon keluaran yang cepat dan lebih akurat ketika sebuah sistem mengalami gangguan.
2. METODE
Steam drum/boiler adalah suatu pesawat yang berfungsi untuk mengkonversikan energi kimia pada bahan bakar menjadi energi panas, selanjutnya energi panas tersebut diserap oleh air di dalam boiler sampai pada kondisi tertentu, yakni melewati titik didihnya kemudian air tersebut akan berubah fase dari cair menjadi gas atau uap. Uap ini yang kemudian disebut
steam (Luyben, 1990).
Ditinjau dari komponennya, maka
boiler terdiri dari dua komponen utama, yaitu: dapur, sebagai alat mengubah energi kimia menjadi energi panas, dan
alat penguapan (evaporator) yang mengubah panas pembakaran (energi panas) menjadi energi panas uap.
Kedua komponen tersebut di atas telah memungkinkan suatu boiler untuk berfungsi, sedangkan komponen pendukung lainnya adalah: cerobong asap, sistem pemipaan, yang memungkinkan sistem menghantar kalor yang efektif antara gas panas dengan
boiler, dan sistem pemanasan lanjut, pemanas udara pembakaran serta pemanas air umpan boiler untuk meningkatkan efisiensi boiler.
Pada penelitian ini, media yang digunakan untuk memanasi boiler atau
steam drum adalah gas exhaust (gas buangan) dari turbin, seperti pada Gambar 1 di bawah. Steam drum
tersebut terletak di samping unit turbin gas yang mana exhaust gas dari turbin masuk ke steam drum melalui burner
yang ditempatkan dalam ruang bakar.
Burner tersebut juga sebagai tempat pembakaran gas alam yang panas pembakarannya akan bercampur dengan panas exhaust gas turbine. Gas panas tersebut masuk ke dalam superheater 2, tempat dimana temperatur exhaust gas
paling tinggi sehingga dapat menghasilkan steam dengan tekanan tinggi (high pressure steam).
Gambar 1. PID steam drum
Gas panas yang telah dipakai, sebagian panasnya kemudian dialirkan menuju superheater 1 dan evaporator. Pada evaporator, panas yang masuk digunakan untuk mengubah feed water
yang masuk boiler menjadi fase uap
saturated. Exhaust gas yang keluar dari
evaporator merupakan gas sisa dari proses penguapan, namun karena masih mempunyai temperatur yang tinggi maka gas tersebut dilewatkan ke dalam
evaporator untuk dimanfaatkan
panasnya sebagai preheater umpan
boiler yang masuk. 2.1 Pengendali PID
Pengendali PID merupakan gabungan antara tiga macam mode pengendali yaitu Proporsional (P), Integral (I), dan Derivative (D). Tujuan penggabungan ini adalah untuk menutupi kekurangan dan menonjolkan kelebihan dari masing-masing mode pengendali (Ogatha, 1990, dan Gunterus, 1994). Misalnya mode P, berfungsi mempercepat rise time agar respon sistem lebih cepat mencapai setpoint, namun dia masih memiliki kekurangan yaitu meninggalkan offset. Kelemahan ini dapat diatasi dengan menggabungkannya dengan mode I yang mampu menghilangkan offset dan juga mengurangi terjadinya maximum overshoot yang terlalu besar. Tetapi mode I menyebabkan lambatnya respon sistem, dan untuk menanggulanginya maka pengendali ini digabungkan dengan mode D.
Fungsi alih pengendali PID adalah sebagai berikut:
∫
+ + + = t s D I p dt de Kc dt e Kc e Kc p 0 . . . . . τ τ (1)Kp, Ki, dan Kd adalah parameter pengendali. Kinerja pengendali sangat
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 222
ditentukan oleh parameter–parameter ini. Penalaan parameter pengendali PID bukanlah hal yang mudah, karena setiap
plant mempunyai karakteristik yang berbeda.
Hal yang perlu diperhatikan dalam penalaan parameter pengendali PID adalah: Gain Kp tidak boleh terlalu besar, karena semakin besar Kp sistem akan semakin sensitif dan cenderung tidak stabil, sedangkan jika Kp kecil akan mengakibatkan offset yang besar;
Ti yang kecil akan bermanfaat untuk menghilangkan offset, tetapi cenderung membawa sistem menjadi lebih sensitif dan mudah berosilasi. Sedangkan Ti
besar belum tentu efektif menghilangkan
offset dan juga membuat respon menjadi lebih lambat; dan Td yang besar akan membuat unsur derivative menjadi lebih menonjol sehingga respon cenderung cepat, sedangkan Td yang kecil kurang membantu pada saat pencapaian set point.
2.2 Pengendali Fuzzy
Dinamika proses yang bersifat
nonlinier tidak dapat direpresentasikan melalui suatu harga mutlak yakni bernilai 0 atau 1 saja, sebab jika nilai ini digunakan untuk merespon berbagai keadaan, maka akan diberlakukan sistem
clustering untuk 2 keadaan saja yakni keadaan yang berharga 0 dan 1. Tentu saja hal ini tidak mewakili kondisi yang sebenarnya. Berdasarkan hal tersebut di atas maka pada tahun 1960 an, Prof. Lotfi A. Zadeh dari California University menggagas munculnya teori fuzzy. Prinsip dasar yang digunakan dalam teori ini adalah membagi keadaan yang ada pada dinamika sebuah proses menjadi sebuah himpunan yang lebih dikenal dengan himpunan fuzzy.
Dalam kaitannya dengan pengendali, sistem fuzzy yang dijelaskan di atas dapat digunakan untuk merancang suatu pengendali berbasis fuzzy dengan langkah–langkah seperti berikut ini (Rochmanudin, 2000).
Fuzzifikasi merupakan suatu proses pemetaan dari masukan pengendali (berupa data crisp/ variabel proses) ke bentuk himpunan fuzzy untuk semesta pembicaraan tertentu. Data yang telah dipetakan selanjutnya dikonversikan ke dalam bentuk linguistik yang sesuai dengan label dari himpunan fuzzy yang telah terdefinisi untuk variable input system. Proses ini dapat dinyatakan sebagai berikut:
X = fuzzifier(Xo) (2) Dengan Xo merupakan vektor dari nilai
crisp untuk satu variabel masukan dari proses, sedangkan X adalah vektor himpunan fuzzy terdefinisi untuk variabel itu, serta fuzzifier adalah suatu operator fuzzifikasi dengan efek yang memetakan data crisp ke himpunan
fuzzy.
Unit basis pengetahuan terdiri dari basis data (Data Base) dan basis aturan (Rule Base). Fungsi dari basis data yaitu untuk mendefinisikan himpunan-himpunan fuzzy dari sinyal masukan dan sinyal keluaran agar dapat digunakan oleh variabel linguistik dalam basis aturan. Sistem Fuzzy yang selalu dikaitkan dengan variabel linguistik pada dasarnya berbentuk aturan IF...THEN
(jika–maka) dan pengetahuan pakar yang disebut aturan kendali.
Fuzzy Inference Engine merupakan inti dari pengendali fuzzy yang mempunyai kemampuan seperti manusia dalam mengambil keputusan.
Pende-finisian besarnya derajat keanggotaan dan variabel linguistik dari aksi pengendalian yang dilakukan untuk masing-masing aturan kendali berdasarkan fungsi implikasi yang digunakan. Langkah yang dilakukan pada tahap ini yaitu mengevaluasi aturan; pengendali fuzzy mengolah dan menyimpulkan proses yang tersusun dari
rule IF...THEN, setiap rule mengha-silkan satu output. Pada dasarnya satu
rule akan aktif apabila kondisi input
memenuhi aturan pernyataan IF. Pengaktifan aturan pernyataan IF
menghasilkan output kendali yang didasarkan pada aturan pernyataan
THEN. Dalam sistem fuzzy digunakan banyak rule yang menyatakan satu atau lebih pernyataan IF. Suatu rule dapat pula mempunyai beberapa kondisi input, yang satu sama lainya dihubungkan dengan AND atau OR untuk mendapat-kan rule output.
Defuzzifikasi mempunyai fungsi yaitu untuk menstranformasikan kesim-pulan yang bersifat fuzzy menjadi sinyal yang sebenarnya yang bersifat crisp
dengan menggunakan operator defuzzy-fie]. Pemetaan aksi pengendalian fuzzy
(dominan fuzzy) ke dalam ruang aksi pengendalian non fuzzy (crisp) merupa-kan dasar dari defuzzifikasi.
2.3 Pengendali PID Fuzzy Gain Scheduling
Sering kali dinamika proses suatu sistem berubah sejalan dengan kondisi operasi proses. Salah satu sumber dinamika perubahan bisa dikarenakan nonliniearitas (Zhao et al., 2003). Keadaan demikian dapat diatasi melalui perubahan parameter-parameter dari pengendali dengan memonitor kondisi operasi proses. Penalaan gain atau parameter pengendali tersebut, lebih
dikenal dengan istilah gain scheduling.
Gain scheduling didasarkan pada pengukuran kondisi operasi dari proses untuk mengimbangi variasi-variasi perubahan parameter atau nonlinearitas dari proses. Gain scheduling merupakan cara yang ampuh untuk mereduksi pengaruh-pengaruh dari variasi parame-ter. Gain scheduling memungkinkan untuk mendapatkan variabel pembantu yang berkorelasi dengan perubahan dalam dinamika proses, yang kemudian mereduksi pengaruh-pengaruh dari variasi parameter dengan merubah parameter pengendali sebagai fungsi variabel pembantu.
Masalah utama dalam merancang sistem dengan gain schedulling adalah untuk mendapatkan variabel scheduling
yang sesuai. Ketika variabel scheduling
didapatkan, maka penalaan parameter pengendali dihitung berdasarkan jumlah kondisi operasi dengan menggunakan metode perancangan yang sesuai. Pengendali kemudian ditala untuk setiap kondisi operasi. Gain schedulling
mempunyai keuntungan lebih yaitu bahwa parameter pengendali dapat berubah dengan cepat dalam menangggapi perubahan proses.
Pengendali PID fuzzy gain scheduling merupakan salah satu aplikasi dari teori himpunan fuzzy.
Logika fuzzy dibuat sedemikian rupa sehingga dapat menjadwal parameter- parameter dalam pengendali PID, hingga sinyal kesalahan dapat dihilangkan sampai pada batas yang diinginkan, bahkan sampai nol (Zhao et al., 2003). Berikut adalah struktur dasar fuzzy gain scheduling PID controller (Gambar 2).
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 224
Gambar 2. Struktur dasar Fuzzy Gain
Schedulling PID Controller
2.4 Dinamika Proses dan Pemodelan Dengan menggunakan persamaan kesetimbangan massa (kontinuitas), maka model matematis proses steam drum adalah (Marlin,1995):
Fase Liquid:
Massa in = massa out
m&W = WV + m&D + m&b
m&W = WV + dt dVL w ρ + m&b dt dVL w ρ = m&W - WV - m&b (3) Fase Vapor:
Massa in = massa out
WV = m&V + dt V d(ρV V) dt V d(ρV V) = WV - m&V (4)
Dengan mensubstitusikan kedua persamaan, diperoleh:
dt V d(ρV V)
=m&W - m&b - (m&V +
dt V d(ρV V) ) dt dVL w ρ + dt V d(ρV V)
= m&W - m&b- m&V (5)
dimana
W
m& laju massa water
b
m
&
laju massa blowdown Vm& laju massa vapor
Fungsi level air dalam drum boiler
terhadap volumenya dapat dinyatakan dengan persamaan: dt dL h dt dV 5 , 0 = (6)
Sehingga persamaan 5 menjadi
) ( ) 5 , 0 ( V V W V dt d dt hL d ρ
ρ + =m&W-m&b-m&V
(7) Untuk melinierkan persamaan di atas digunakan metode pertubasi:
+ + ) ) 5 , 0 5 , 0 ( ( dt L h h L d dt d P P W
ρ
) m ( ) ( W 2 2 V b P V V P V V m m dt d V V dt d & & & − − = +ρ
ρ
(8) = + + ( ) ( ) 5 , 0 2 2 2 2 2 2 P V V P V V P W V dt d dt d V dt L d hρ
ρ
ρ
) (mW mb mV dt d & & & − − (9)Sedangkan volume uap dalam steam drum boiler:
hL V
VV = tot −0,5 (10)
Dengan mensubstitusikan persamaan (9) ke persamaan (10) didapat persamaan
+ 2 2 5 , 0 dt L hd P W
ρ
= − + −0,5 ( ) 2( 0,5 ) 2 2 2 P tot V P tot V hL dt d V dt d L h Vρ
ρ
) (mW mb mV dt d & & & − − (11)Dengan melakukan kompensasi tekanan dan temperatur pada pengukuran steam flow variable densitas uap dapat dihilangkan sehingga persamaan menjadi
= − 2 2 5 , 0 ) ( dt L d h P V w
ρ
ρ
) (mW mb mV dt d & & & − − (12)Dari persamaan (12) di atas didapatkan transformasi Laplace sebagai berikut
) ( ) ( ) ( ) ( ) ( 5 ,
0 h
ρ
W−ρ
V s2Ls =sm&W s −sm&b s −sm&V s ) ( ) ( ) ( ) ( ) ( 5 ,0 hρW−ρV s Ls =m&W s −m&b s −m&V s
[
( ) () ( )]
) ( 5 , 0 1 ) ( m s m s m s s h s L W b V V w & & & − − − = ρ ρ (13) Berdasarkan data di lapangan diperoleh data-data teknis sebagai berikut:h = 14 m
W
ρ = 965,5 kg/m3
V
ρ = 803 kg/m3
Sesuai dengan persamaan (13) maka didapat fungsi sebagai berikut
[
( ) ( ) ( )]
5 , 1137 1 ) ( m s m s m s s sL = &W − &b − &V
(14) 2.5 Fungsi Transfer Elemen–Elemen Pengendalian
Pada sistem pengendalian yang dirancang ini, digunakan 3 buah sensor
dan transmitter, yaitu sensor laju aliran
feed water, laju aliran uap serta perubahan level steam drum WHB (waste heater boiler).
Untuk mengukur steam flow dan feed water flow digunakan elemen ukur
orifice dan dilengkapi converter P/I yang mengubah sinyal tekanan menjadi tekanan listrik, sedangkan untuk mengukur perubahan level steam drum
digunakan level transmitter tipe
electronic differential transmitter.
Sensor dan transmitter aliran feed water
Berdasarkan penelitian di lapangan untuk transmitter dengan menggunakan metode pengukuran differential pre-ssure, diperoleh data time constant (TC)
sebesar 0,2 detik, pada elemen ini sebagai masukannya adalah BFW (boiler feed water) dengan laju aliran 80T/H atau 22,2 kg/detik dan sebagai keluar-annya adalah arus sebesar 4-20 mA. Dengan persamaan gain dari transmitter, = SpanInput SpanOutput GT
Sedangkan dari data-data lapangan diperoleh harga gain transmitter sebesar
kg A m GT 0,72 . .det 2 . 22 4 20 = − =
Sensor dan transmitter aliran uap Dari pengamatan di lapangan untuk
transmitter dengan menggunakan metode pengukuran differential pressure
buatan Yamatake-Honeywell, diperoleh data time constant (TC) sebesar 0,2 detik. Pada elemen ini sebagai masukannya adalah uap air dengan laju aliran 60T/h atau 16,8kg/detik dan sebagai keluaran transmitternya adalah arus sebesar 4-20 mA.
Dengan menggunakan data-data dari lapangan diperoleh harga gain transmitter sebesar: kg A m GT 0,952 . .det 8 , 16 4 20 = − =
Sensor dan Transmitter Level Steam Drum
Type transmitter yang digunakan adalah differential pressure transmitter,
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 226
dimana pengukuran ketinggian air dalam drum (level) berdasarkan perbedaan tekanan dalam drum, masukan dari
transmitter ini adalah level drum = -875 ~ -525mm (1,4m) dan keluaran berupa sinyal arus listrik sebesar 4-20mA.
Transmitter ini mempunyai time constant 0,2 detik, diperoleh: m mA GL 11,429 / 4 , 1 4 20 = − =
Sehingga didapatkan fungsi alih
transmitter level sebagai berikut
1 2 , 0 429 , 11 ) ( ) ( + = s s I s L L
Control Valve aliran Air
Dengan asumsi bahwa control valve
yang digunakan mempunyai karakteristik aliran yang linier, maka fungsi transfer control valve dapat didekati dengan persamaan orde satu sebagai berikut : 1 + = CV V s T K G M τ
KV = Gain control Valve (kg (det.mA)-1)
TCV= time constant control valve (dt) Untuk mendapatkan gain control valve, dapat diperoleh dengan menggunakan persamaan masukan tekanan perubahan maks aliran laju K _ _ _ _ = psi dt kg psi dt kg K 1,85 / . ) ( 3 15 ) / ( 2 , 22 = − =
Gain I/P adalah
mA psi mA psi G 0,75 / ) ( 4 20 ) ( 3 15 = − − = τ
Sehingga diperoleh gain total control valve
KV= K. Gτ = 1,85 . 0,75 = 1,38 (kg dt/mA)
Time constant efektif control valve
diperoleh berdasarkan hubungan waktu
stroke, perfreksional terhadap posisi
valve dan perbandingan konstanta waktu
inferent terhadap waktu stroke yang dinyatakan
TCv= TV .(∆V+RV)
TCV = time constant control valve (dt)
TV = waktu stroke penuh (1,3 dt)
RV = perbandingan konstanta waktu inverent terhadap waktu stroke (RV =
0,03) V ∆ = max _ min _ max _ aliran aliran aliran − = 0,48 2 , 22 6 , 11 2 , 22 = − TCv= 1,3 . (0,48+0,03) = 0,66 1 66 , 0 38 , 1 ) ( ) ( + = s s G s M C s
3. HASIL DAN DISKUSI 3.1 Simulasi Open Loop
Simulasi pada open loop ini dilakukan untuk mengetahui sejauh mana performansi sistem tanpa pengendali. Uji open loop dilakukan dengan memberikan input berupa sinyal
Gambar 3. Grafik respon open loop
Gambar 3 menunjukkan bahwa dengan uji open loop tanpa adanya pengendali, Level tidak bisa mencapai nilai setpoint.
Karena performansi sistem tersebut, jauh dari level yang diinginkan yaitu sebesar 70cm dan 80cm, maka hal inilah yang menjadikan pentingnya pengguna-an controller pada plant ini untuk mengendalikan level.
3.2 Simulasi close loop
Hasil simulasi fuzzy gain schedulling ditampilkan dalam bentuk grafik respon
keluaran sistem. Sistem yang telah dirancang diuji dengan lima pengujian, yaitu uji respon masukan sinyal step, uji
tracking setpoint, uji noise pengukuran, uji beban dan uji gabungan. Sebagai Pembanding digunakan sistem pengen-dali fuzzy statis dan sistem pengendalian PID dimana sistem ini yang dipakai pada
plant yang sama. Sistem pengendalian ini digunakan untuk melihat seberapa handal performansi dari sistem pengendalian yang telah dirancang dalam penelitian ini.
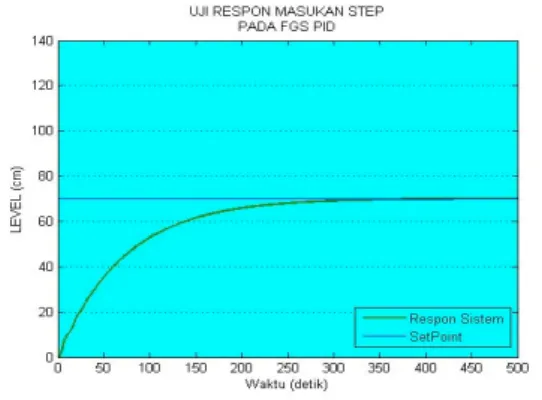
Uji 1: Uji Respon Masukan Step Pada pengujian ini diberikan setpoint
sebesar 50% atau 70cm, skala 0% menunjukkan ketinggian/level 0 cm dihi-tung dari dasar drum dan skala 100% menunjukkan level 140cm (1,4 meter).
Setpoint ini merupakan setpoint yang sesuai dengan kondisi operasi normal sistem yang diinginkan di real plant.
Hasil simulasi untuk Uji 1 ditunjukkan pada Gambar 4.
Gambar 4. Respon sistem pengendalian level terhadap input step pada FGS (fuzzy gain
schedulling ) PID
Pada simulasi ini respon keluaran pada level menunjukkan overshoot
sebesar 0,12%. Ess (steady state error) sebesar 0,48% dan mencapai kondisi
steady state setelah 272 detik dari keadaan start up. Respon sistem pengendalian level dengan input step
dengan controller berbasis fuzzy statis
(KLF) seperti pada Gambar 5.
Gambar 5. Respon sistem pengendalian level terhadap input step pada KLF
Pada simulasi ini respon keluaran pada level menunjukkan overshoot
sebesar 0,1%. Ess sebesar 0,52% dan mencapai kondisi steady state setelah
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 228
280,4 detik dari keadaan start up
(Gambar 6).
Gambar 6. Respon sistem pengendalianlevel terhadap input step pada PID
Pada simulasi ini respon keluaran pada level menunjukkan overshoot
sebesar 4,09%, Ess sebesar 0,5% dan mencapai kondisi steady state setelah 1055,5 detik dari keadaan start up. Uji 2: Uji Tracking Setpoint
Pada simulasi ini setpoint awal pada kondisi normal yaitu 70cm, setpoint
kedua sebesar 80cm dan setpoint ketiga 60cm. Hasil simulasi ditunjukkan pada Gambar 7.
Gambar 7. Respon sistem pengendalian level dengan uji tracking setpoint pada FGS (fuzzy
gain schedulling) PID
Pada simulasi ini respon keluaran untuk setpoint pertama sebesar 70cm dicapai dalam waktu 276,3 detik dengan
overshoot sebesar 014% dan kesalahan
keadaan tunaknya sebesar 0,49%.
Settling time kedua sebesar 80cm dicapai dalam waktu 210,16 detik dari setpoint
pertama dengan overshoot sebesar 0,12% dan kesalahan keadaan tunaknya sebesar 0,425%. Untuk setpoint ketiga sebesar 60cm dicapai dalam waktu 350,5 detik dari setpoint kedua dan kesalahan keadaan tunaknya sebesar 0,33% (Gambar 8).
Gambar 8. Respon sistem pengendalian level dengan uji tracking setpoint pada KLF
Pada simulasi ini respon keluaran untuk setpoint pertama sebesar 70cm tercapai dalam waktu 295,7 detik dengan
overshoot sebesar 0,12% dan kesalahan keadaan tunaknya sebesar 0,59%.
Settling time kedua sebesar 80cm dicapai dalam waktu 245,6 detik dari setpoint
pertama dengan overshoot sebesar 0,12% dan kesalahan keadaan tunaknya sebesar 0,51%. Untuk setpoint ketiga sebesar 60cm tercapai dalam waktu 277,8detik dari setpoint kedua dan kesalahan keadaan tunaknya sebesar 0,45% dan mengalami undershoot
Gambar 9. Respon sistem pengendalian level
dengan uji tracking setpoint pada PID
Pada simulasi ini respon keluaran untuk setpoint pertama sebesar 70cm tercapai dalam waktu 1072 detik dengan
overshoot sebesar 3,72% dan kesalahan keadaan tunaknya sebesar 0,46%.
Settling time kedua sebesar 80cm dicapai dalam waktu 1760 detik dari setpoint
pertama dengan overshoot sebesar 5,43% dan kesalahan keadaan tunaknya sebesar 1,96%. Untuk setpoint ketiga sebesar 60cm tercapai dalam waktu 735 detik dari setpoint kedua dan kesalahan keadaan tunaknya sebesar 0,58% dan mengalami undershoot sebesar 2,7%. Uji 3: Uji Beban
Pada pengujian ini dilakukan pengu-rangan laju aliran steam keluar dari
steam drum sebesar 11,67 kg/s dari keadaan normal yaitu keluaran laju
steam
Gambar 10. Respon sistem pengendalianlevel dengan uji beban FGS PID
sebesar 16,05 kg/s. Hasil yang didapat dari pengujian ini ditunjukkan pada Gambar 10.
Dalam pengujian ini beban diberikan pada detik ke 500 dari keadaan
steady state. Hasil yang didapatkan adalah berkurangnya level sebesar 0,32% (Gambar 11).
Gambar 11. Respon sistem pengendalian level
dengan uji beban pada KLF
Gambar 12. Respon sistem pengendalian level
dengan uji beban pada PID
Dalam pengujian ini beban diberikan pada detik ke 3000 dari keadaan steady state. Hasil yang didapatkan adalah berkurangnya level
sebesar 2,1% dan Sistem kembali ke keadaan steady state setelah 270 detik sejak gangguan diberikan (Gambar 12). Uji 4: Uji Noise
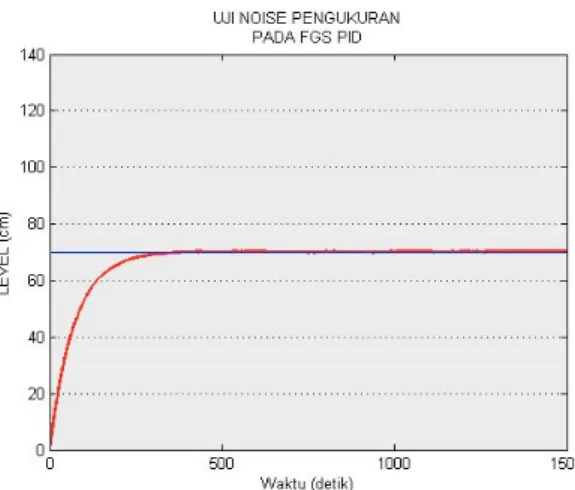
Pengujian noise merupakan penguji-an dengpenguji-an penambahpenguji-an noise pengukur-an ypengukur-ang terjadi akibat kesalahpengukur-an pengu-kuran pada transmitter (Gambar 13).
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 230
Gambar 13. Respon sistem pengendalianlevel dengan gangguan noise pada FGS PID
Pada uji noise ini, sistem diberi
noise berupa sinyal random. Uji noise diberikan pada saat kondisi sistem sedang berjalan dan dalam keadaan
steady state yaitu pada posisi 500 detik Dari hasil simulasi menunjukkan bahwa walaupun sistem tetap mengalami osilasi, sistem mampu bertahan dan memberikan respon yang tetap berada
Gambar 14. Respon sistem pengendalianlevel dengan gangguan noise pada KLF dalam kestabilan yang diijinkan. Dari pengujian ini diperoleh Ess sebesar 0,35 % (Gambar 14).
Uji noise diberikan pada saat kondisi sistem sedang berjalan yaitu pada detik ke 500. Dari hasil simulasi menunjukkan bahwa sistem mengalami osilasi sesaat, akan tetapi secara umum sistem mampu
bertahan dan memberikan respon yang cepat dan tetap berada dalam kondisi stabil, yaitu dengan Ess sebesar mencapai 1,2%, yang berarti masih lebih besar dari simulasi pertama (Gambar 15).
Gambar 15. Respon sistem pengendalianlevel dengan gangguan noise pada PID
Pada pengujian ini, sinyal noise
diberikan pada saat kondisi sistem sedang beroperasi yaitu pada detik ke 3000, Dari hasil simulasi menunjukkan bahwa sistem mampu bertahan dan memberikan respon yang baik dengan nilai kesalahan pada keadaan tunak (Ess) sebesar 1,42%.
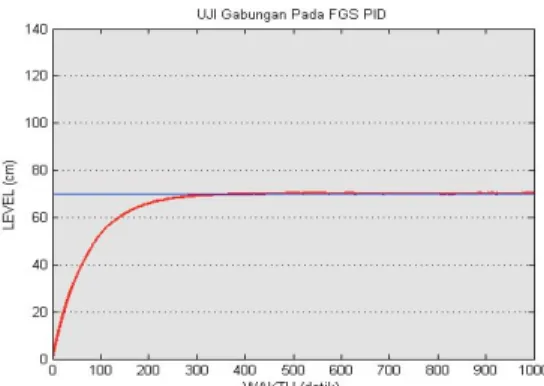
Uji 5: Uji Gabungan
Uji gabungan merupakan gabungan dari uji noise pengukuran dan uji beban. Hasil pengujian ini ditunjukkan pada Gambar 16.
Pada pengujian ini, sistem dengan
controller FGS PID dijalankan dengan menambahkan sinyal beban sebesar 30% dari kondisi normal dan noise
pengukuran pada saat sistem berada pada
steady state. Pengujian dilakukan pada detik ke 500, dan dari respon keluaran sistem diperoleh bahwa sistem tidak me- ngalami overshoot serta didapatkan kesa-lahan keadaan tunak (Ess) sebesar 0.94% (Gambar 17).
Gambar 16. Respon sistem pengendalianlevel dengan uji gabungan pada FGS PID
Gambar 17. Respon sistem pengendalianlevel dengan uji gabungan.padaKLF Sama dengan pengujian sebelumnya yaitu uji 5, simulasi ini dijalankan dengan menambahkan beban dan noise
pada sistem saat sistem dalam kondisi
steady state. Pengujian dilakukan pada detik ke 500. Dapat diketahui bahwa pada pengujian ini tidak terjadi osilasi, dan sistem mampu merespon dengan cepat dan smooth. Pada pengujian ini didapatkan kesalahan keadaan tunak sebesar 1,3%. Ini berarti kinerja
controller masih dibawah controller
FGS PID (Gambar 18).
Sedangkan pada sistem dengan
controller PID, pengujian dilakukan pada detik ke 3000. Dalam pengujian ini, tampak sistem cenderung berosilasi
Gambar 18. Respon sistem pengendalian level dengan uji gabungan pada PID dengan maximum overshoot 15% dengan kesalahan keadaan tunak sebesar 2,4%. Dengan demikian dari segi performansi, sistem dengan controller PID, lebih rendah bila dibandingkan dengan 2 mode
controller sebelumnya. 4. KESIMPULAN
Pada pengujian respon step tanpa adanya perubahan beban untuk pengendalian level, sistem dapat mencapai setpoint dalam waktu 272 detik dengan maximum overshoot 0,12% dan kesalahan keadaan tunak 0,48% dibawah toleransi 2% (standar perfor-mansi).
Pada variasi pengujian lainnya seperti perubahan setpoint, noise
pengukuran, perubahan beban dan pengujian gabungan, menunjukkan bahwa pengendali fuzzy gain scheduling
PID dapat mengatasi semua perubahan dan gangguan yang terjadi secara lebih cepat dan toleransi kesalahan pada keadaan tunak lebih kecil.
Algoritma pengendali fuzzy gain scheduling PID pada loop pengendalian level, secara umum mampu memberikan performansi pengendalian yang lebih baik dari pada pengendali fuzzy statis maupun PID biasa.
Jurnal Sains dan Teknologi EMAS, Vol. 18, No. 4, November 2008 232
DAFTAR PUSTAKA
Abadi, I. (1999), Sistem Fuzzy, Jurusan Teknik Fisika FTI-ITS Surabaya. Gunterus, F. (1994), Falsafah Dasar:
Sistem Pengendalian Proses, Elex Media Komputindo, Jakarta.
Herawaty, R. (2002), Perancangan Sistem Pengendalian Level Boiler Dengan Metode Logika Fuzzy,
Teknik Fisika FTI-ITS Surabaya. Kosko, B. (1992), Neural Network and
Fuzzy System: A Dynamical System Approach to Machine Intellegence, Prentice-Hall, International Inc. Luyben, W.L. (1990), Process
Modelling, Simulation, and Control for Chemical Engineer, McGraw-Hill Publishing Company.
Marlin, T.E. (1995), Process Control: Designing Processes and Control
Systems for Dynamic Performance, McGraw-Hill Company.
Rochmanuddin, M. (2000), Fuzzy Control Systems, Laboratorium
Instru-mentasi dan Kontrol ITB.
Ogata, K. (1990), Modern Control Engineering, Prentice-Hall Interna-tional Edition.
Kusumadewi, S. (2002), Analisis dan Desain Sistem Fuzzy Menggunakan Toolbox Matlab, Graha Ilmu, Yogya-karta.
Winarno, A. (1999), Perancangan Sistem Pengendalian Level Boiler dengan Controller PID Plus Kompensator, Teknik Fisika.
Zhao, Z.Y., Tomizuka, M., and Isaka, S. (2003), Fuzzy Gain Scheduling of PID ControllerIEE Transactions On Systems. MAN, Cybernetics Vol. 23, No. 5, September/Oktober).