8
Proses perancangan suatu alat ataupun mesin yang baik, diperlukan perencanaan yang cermat dalam perhitungan dan pemilihan bahan, kekuatan, ukuran dan harga. Teori-teori yang berhubungan dengan alat yang perlu dibuat perlu dijadikan landasan dalam proses merancang konstruksi alat atau mesin, sehingga menghasilkan rancangan alat atau mesin yang baik, kuat, aman dan yang pasti menghemat biaya.
Pada bab ini akan dibahas mengenai, dasar-dasar sistem pneumatik, PLC yang menjadi dasar dalam merancang alat pencetak tablet.
2.1 Sistem Pneumatik
Instalasi pneumatik mulai diterapkan di industri,misalnya pada mekanisasi pengendalian ataupun penggerakan mesin-mesin dan peralatan. Hal ini disebabkan karena sistem pneumatik mempunyai keunggulan-keunggulan sehingga memberikan keuntungan yang lebih dalam dunia industri yang menerapkannya.
a) Fluida kerja yang digunakan berupa udara yang mudah diperoleh karena jumlahnya tidak terhingga.
b) Udara bertekanan sangat mudah dipindahkan melalui pipa saluran sampai jarak yang jauh dan juga tidak diperlukannya saluran balik.
c) Penyimpanan sangat mudah sebab udara bertekanan dari kompresor dapat disimpan di dalam tabung, sehingga kompresor tidak bekerja terus menerus.
d) Udara bertekanan relatif tidak peka dengan perubahan temperatur, hal ini akan menjamin pengoperasian yang optimal.
e) Tidak mudah terjadi ledakan dan terbakar, dikarenakan udara bertekanan tidak mengandung resiko terbakar dan meledak.
f) Bersih dan kering, sebab udara bertekanan tanpa pelumasan adalah bersih, meskipun terjadi kebocoran tidak akan mencemari lingkungan sekitar. Hal inilah yang sangat diperlukan dalam industri obat-obatan, makanan, minuman, dll.
g) Konstruksinya yang sederhana, sehingga perawatannya mudah.
h) Dapat digunakan untuk kecepatan kerja yang tinggi, ini disebabkan udara bertekanan media kerja yang cepat sehingga dapat menghasilkan kecepatan kerja yang tinggi.
Disamping memiliki banyak keunggulan, instalasi pneumatik juga memiliki beberapa kekurangan, antara lain:
a) Pengadaan udara bertekanan harus bersih dari partikel debu dan kondensi untuk mencegah terjadinya keausan komponen-komponen pneumatik. b) Udara bertekanan hanya efisien untuk kebutuhan gaya tertentu, yaitu
sampai 30.000 Newton pada tekanan normal (4-8 bar).
c) Udara bertekanan dapat dimampatkan sehingga sulit untuk mendapatkan kecepatan yang konstan dan teratur.
d) Udara bertekanan menimbulkan suara bising, yang menyebabkan polusi suara.
2.1.1 Peralatan Pendukung Sistem Pneumatik
Peralatan pendukung dalam instalasi pneumatik terdiri dari kompresor dan unit pelayanaan udara (Air Service Unit).
2.1.1.1 Kompresor
Kompresor adalah alat untuk memampatkan udara dan gas. Prinsip dasar dari kompresor yaitu menghisap udara bebas dari atmosfer bebas, torak silinder bergerak bolak-balik untuk menghisap, menekan dan mengeluarkan gas secara berulang-ulang. Udara yang dihisap melalui filter, kemudian udara tersebut dipompakan ke dalam tangki penampung yang disebut reservoir sampai pada tekanan kerja yang dibutuhkan. Penggerak dari kompresor adalah motor listrik yang dikontrol dengan saklar (switch). Pengendalian tekanan yang
berhungan dengan penampung. Bila batas atas sudah dilampaui, kompresor berputar bebas tanpa beban. Selama tekanan turun di bawah nilai tertentu, maka kompresor terhubung kembali dengan keadaan beban penuh (daya penuh).
Gambar 2.1 Sistem Suplai Udara (www.google.co.id)
Penempatan instalasi kompresor yang akan dipasang perlu mempertimbangkan beberapa hal di bawah ini:
1. Instalasi kompresor harus sedekat mungkin dengan tempat-tempat yang membutuhkan udara bertekanan. 2. Daerah sekitar kompresor tidak boleh berdekatan dengan
gas yang mudah terbakar atau zat yang mudah terbakar. 3. Pemeriksaan dan pemeliharaan harus dapat dilakukan
dengan mudah.
4. Ruang kompresor harus terang, cukup luas dan mempunyai ventilasi yang baik.
2.1.1.2 Unit Pelayanan Udara (Air Service Unit)
Gambar 2.2 Unit Pelayanan Udara (www.google.co.id)
Unit pelayanan udara (Air Service Unit) adalah suatu gabungan atau kombinasi dari berbagai komponen penyedia udara bertekanan, yang terdiri dari empat komponen utama yaitu:
a. Penyaring Udara
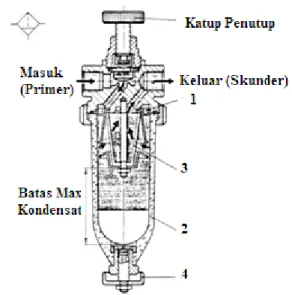
Pemilihan penyaring udara yang benar memegang peranan yang sangat penting dalam pengadaan udara bertekanan. Parameter penyaring udara adalah pada ukuran pori-porinya. Ukuran pori-pori penyaring menunjukkan ukuran partikel-partikel minimum yang dapat disaring dari udara bertekanan. Mangkuk saringan harus dibersihkan secara berkala, dari butiran-butiran debu dan karat. Hal ini untuk menghindari terjadinya penyumbatan pada saluran keluarnya. Karakteristik yang
terpenting dari penyaring udara adalah tingkat efisiensinya, yaitu banyaknya partikel yang tersaring dari aliran udara.
Gambar 2.3 Penyaring Udara dan Simbolnya (www.google.co.id) Keterangan
1. Lubang putaran angin 2. Mangkuk saringan 3. Filter cartridge 4. Baut
Prinsip kerja penyaring udara (gambar 2.3) adalah sebagai berikut :
Ketika udara memasuki penyaring, udara bertekanan harus mengalir melalui lubang-lubang putaran angin (1). Ini menyebabkan udara yang masuk berputar dahulu. Gerakan sentrifugal itu menyebabkan butiran air dan kotoran kotoran terlempar melawan dinding kemudian
mengalir dan terkumpul dibagian bawah mangkuk. Udara bertekanan mengalir melalui dinding saringan (filter cartridge) (3) ke saluran luar. Dalam saringan standar, lebar celah antara satu dengan yang lain berkisar antara 30-70 μm. Apabila cairan dan kotoran yang terkumpul pada bagian bawah mangkuk sudah mencapai batas maksimum yang ditentukan, maka cairan harus dikeluarkan dengan memutar baut (4) searah putaran jarum jam.
b. Pengatur Tekanan Udara
Tekanan udara yang keluar dari kompresor masih mempunyai tekanan tinggi, sehingga pengatur tekanan diperlukan untuk menjaga atau mengatur dari tekanan kompresor menjadi tekanan kerja. Perubahan tekanan dalam sistem pipa dapat berdampak negatif pada kerja katup dan langkah silinder. Tekanan yang konstan adalah salah satu syarat agar operasi kontrol pneumatik bebas dari kesalahan. Biasanya alat ini dipasang menjadi satu dengan penyaring udara.
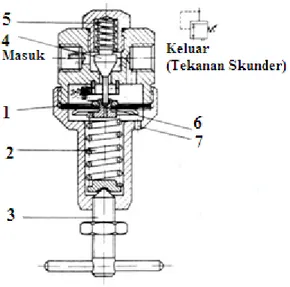
Gambar 2.4 Pengatur Tekanan dan Simbolnya (www.google.co.id) Keterangan: 1. Diafragma 2. Pegas 3. Baut penyetel 4. Tangkai katup 5. Cincin seal penutup 6. Dudukan katup 7. Lubang saluran
Prinsip kerja pengatur tekanan udara (gambar 2.4) adalah sebagai berikut :
Udara bertekanan mengalir kedalam pengatur tekanan dan bergerak atas dasar diafragma (1). Pegas (2) yang dapat disesuaikan gaya penekanannya dengan memutar knop (3) bergerak melawan sisi yang lain dari
diafragma. Jika udara bertekanan dipakai pada sisi sekunder, gaya gerakan pada diafragma (1) berkurang. Pegas penekan (6) menekan melawan batang katup (4) sehingga mengangkat cincin seal penutup (5) dari dudukan katup. Udara bertekanan dapat mengalir kedalam sampai keadaan keseimbangan sudah dicapai kembali.
Apabila tekanan sekunder (sisi kerja) naik sampai diatas harga yang disetel sebelumnya misal: akibat gaya luar bergerak pada bagian kerja atau pengaturan yang rendah dari pegas penekan (2), maka beban yang lebih besar pada diafragma akan mendorong pegas ke bawah. Maka batang katup (4) akan terangkat dari dudukan katup (8) dan udara bertekanan dari sisi sekunder dapat keluar melalui lubang pembuang (9). Udara bertekanan akan terus menerus keluar sampai pada batas yang disetel sebelumnya tercapai lagi. Lubang pembuangan tidak boleh tertutup, karena akan berakibat perlengkapan dalamnya tidak berfungsi. Lubang semprot pengimbang (7) akan mempercepat aliran udara sekunder dan tekanan udara turun berdasarkan diafragma, andaikata volume alirannya lebih tinggi. Hal ini dapat mencegah penurunan tekanan sekunder dengan angka aliran yang tinggi.
c. Pengukur Tekanan
Biasanya, pengatur tekanan dipasang atau dilengkapi dengan sebuah pengukur tekanan yang menunjukan besarnya tekanan udara yang mengalir sesudah melalui pengatur tekanan.
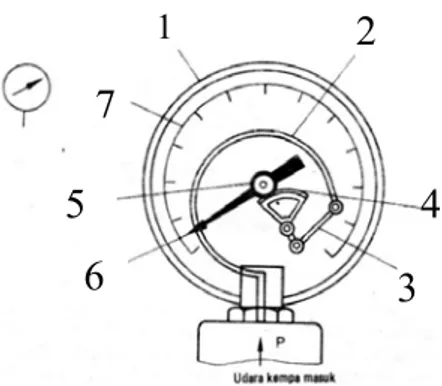
Gambar 2.5 Pengukur Tekanan dan Simbolnya (www.google.co.id) Keterangan :
1. Casing
2. Tabung bourdon 3. Tuas penghubung
4. Tembereng gigi penggerak 5. Pinion
6. Jarum penunjuk 7. Skala
Prinsip kerja pengukur tekanan udara (gambar 2.5) adalah sebagai berikut :
Udara mengalir masuk ke pengatur tekanan melalui lubang saluran P. Tekanan pada pipa bourdon (2) menyebabkan pipa memanjang. Tekanan yang lebih besar
3
2
4
15
6
7
menyebabkan belokan radius lebih besar. Kemudian pergerakan pemanjangan (belokan) diubah ke jarum penunjuk (6) melalui tuas penghubung (3), tembereng gigi penggerak (4) dan roda gigi yang digerakkan (pinion) (5). Sehingga tekanan pada saluran masuk dapat terbaca pada skala (7).
d. Pelumas (Lubricator)
Bagian-bagian yang bergerak dan menimbulkan gesekan memerlukan pelumasan, termasuk didalamnya komponen-komponen pneumatik (silinder dan katup). Untuk menjamin supaya bagian-bagian yang bergesekan pada komponen tersebut dapat bekerja dan dipakai terus menerus, maka harus diberi pelumas yang cukup. Minyak pelumas harus ditambahkan dengan jumlah tertentu ke udara bertekanan dengan memakai perangkat pelumasan (lubricator).
Keuntungan pelumasan adalah :
a. Memungkinkan terjadinya penurunan angka gesekan b. Dapat memberikan perlindungan dari korosi.
c. Umur pemakaian bagian-bagian pneumatik dapat lebih tahan lama.
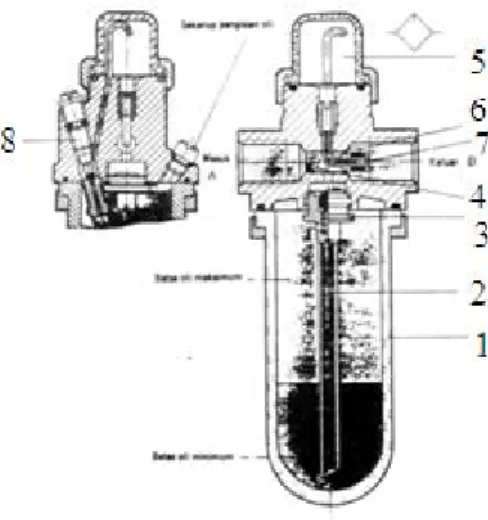
Gambar 2.6 Perangkat Pelumas (Lubricator) dan Simbolnya (www.google.co.id)
Keterangan :
1. Gelas mangkuk oli 2. Pipa oli 3. Bushing 4. Pembatas 5. Lengkungan penetes 6. Katup pengecek 7. Pipa 8. Sekrup pengatur
Prinsip kerja pelumas (gambar 2.6) adalah sebagai berikut :
Perangkat pelumasan (1ubricator) bekerja menurut prinsip venturi. Udara bertekanan mengalir melewati perangkat lumas melalui saluran masuk ke saluran keluar. Katup pengecek (6) menutup lintasan udara ketika tidak ada udara yang sedang mengalir. Sewaktu udara mengalir, katup pengecek (6) membuka dan udara bertekanan dapat mengalir dengan bebas ke saluran keluar.
Pembatas (4) dalam lintasan aliran menimbulkan penurunan tekanan. Ruang hampa terjadi disekitar lengkungan penetes (5) dan oli terhisap ke atas melalui pipa oli (2). Tetesan-tetesan oli terbawa dalam aliran udara melalui pipa (7) berbentuk kabut dan diteruskan menuju komponen-komponen pneumatik. Bushing (3) dan katup pengecek memungkinkan untuk menambah volume oli dalam gelas, sementara perangkat lumas sedang dalam keadaan bekerja.
Dengan sekrup pengatur, banyaknya oli yang dikabutkan dapat diatur. Gelas mangkuk oli harus dijaga selalu bersih, sehingga batas oli dalam gelas dapat selalu terlihat.
2.1.2 Unit Penggerak (Actuator)
Aktuator adalah suatu alat untuk mengubah sinyal output tertentu menjadi tenaga kerja yang dimanfaatkan. Dalam hal ini digunakan aktuator berupa motor listrik DC dan silinder pneumatik. Besarnya tenaga yang dihasilkan tergantung dari besarnya tekanan, luas penampang silinder dan gesekan yang timbul antara dinding dalam silinder dengan dinding luar torak silinder.
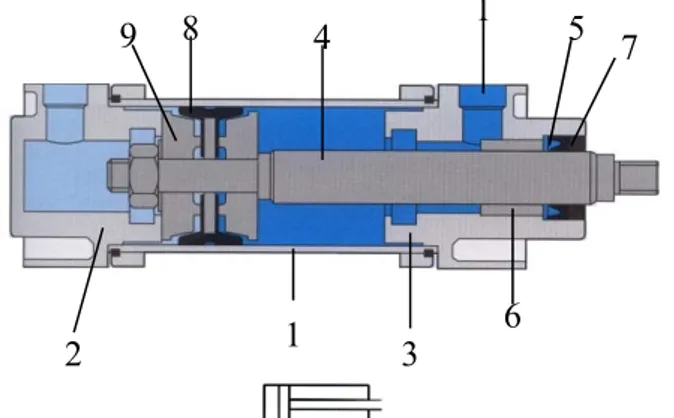
2.1.2.1 Silinder Penggerak Ganda (Double Acting Cylinder) Silinder kerja ganda digunakan terutama apabila torak diperlukan untuk melakukan kerja bukan hanya pada gerakan maju, tetapi juga pada gerakan mundur. Dengan memberikan udara bertekanan pada satu sisi pemukaan piston dan sisi yang lain terbuka. Silinder kerja ganda. memiliki dua saluran
Silinder kerja ganda mempunyai keuntungan yaitu bisa dibebani pada kedua arah gerakan batang pistonnya. Ini memungkinkan pemasangannya lebih fleksibel.
Gambar 2.7 Silinder Penggerak Ganda (www.google.co.id) Keterangan : 1. Silinder barel 2. Tutup 3. Tutup bearing 4. Batang torak 5. Sealing ring 6. Bearing bush 7. Scraping ring 8. Double packing 9. Round cord ring 10. Saluran udara 9 8 4 1 5 7 6 3 1 2
Untuk menghitung ukuran silinder yang diperlukan, dapat dipergunakan rumus :
Fa = A.P – Rr (Persamaan 2.1) Rr = 3% x 60,39 (N) = 1.811 (N)
Keterangan:
Fa= Gaya tekan silinder (N)
P = Tekanan Kerja (N/mm2)
A = Luas penampang silinder tanpa batang torak (mm²) d = Diameter dalam silinder (mm) Rr= gaya gesek (3-20% dari gaya terhitung) (N)
(Sugihartono,1985 : 94) Sedangkan untuk menghitung kebutuhan udara pada silinder double acting, dipergunakan rumus :
(Persamaan 2.1.1) Q = { (h.0,785.D²) + h.0,785. (D²-d²) }.n. Perbandingan kompresi Perbandingan kompresi = , ,
= , ,
Q = Debit udara yang dibutuhkan (cm3/menit) D = Diameter dalam silinder (mm) d = Diameter batang torak (mm) h = Panjang langkah silinder (mm)
2.1.2.2 Motor Listrik
Motor listrik adalah sebuah alat yang mengubah energi listrik menjadi energi gerak. Energi listrik yang diterima sebelumnya diubah menjadi elektromagnet melalui kumparan yang ada, elektromagnet yang timbul akan menggerakkan poros untuk bergerak linier maupun angular. Berdasarkan catu dayanya motor listrik memiliki dua jenis yaitu motor AC (Alternating Current) dan DC (Direct Current). Sedangkan berdasarkan arah gerak yang dihasilkan motor listrik memilki dua jenis yaitu motor linier yang menghasilkan gerak lurus dan motor angular yang menghasilkan gerak rotasi pada porosnya, motor jenis inilah yang umum dipakai.
Untuk menghitung daya dari motor listrik diperlukan, digunakan rumus :
P = Ft .
.
r (Persamaan 2.2) Kecepatan sudut ( )=
(Larry D Mitchel,1991) Dimana n didapat dari:=
Keterangan:P = Daya motor (W)
Ft = Gaya total (N)
=
Kecepatan sudut (rad/detik)d1 = Diameter puli penggerak (mm) d2 = Diameter puli yang digerakkan (mm) n1 = Putaran penggerak (rpm) n2 = Putaran yang digerakkan (rpm)
Untuk mendukung kedua aktuator tersebut, penulis menambahkan pegas, dimana spesifikasi dapat diperoleh dengan perhitungan sebagai berikut : (Persamaan 2.3)
Konstanta pegas (k) = .
. .
Gaya tarik pegas (F) = k.x Keterangan :
G = Modulus Geser (Kg/mm2) d = diameter coil pegas
n = jumlah lilitan aktif pegas ( N – 1,4 s/d 2 ) N = Jumlah seluruh lilitan
D = Diameter lilitan Pegas
(Sularso,2002:318)
2.1.3 Katup (Valve)
2.1.3.1 Katup Pengatur Satu Arah Aliran (Check Thortle Valve) Katup ini berfungsi sebagai pengatur debit aliran. Pada katup ini, aliran udara satu arah saja.
Gambar 2.8 Katup Kontrol Satu Arah dan Simbolnya (www.google.co.id)
Katup-katup ini digunakan untuk mengatur kecepatan pada silinder-silinder pneumatik. Jika memungkinkan katup check thortle hendaknya harus dipasang langsung dekat silinder.
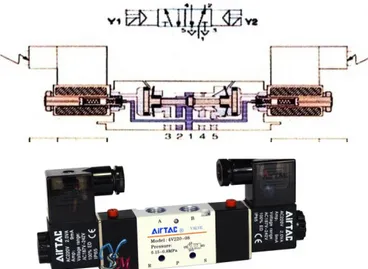
2.1.3.2 Katup 5/2 Solenoid Ganda Prinsip kerja solenoid :
Solenoid bekerja berdasarkan prinsip dasar electromagnet, apabila konduktor (kabel tembaga) dibentuk menjadi sebuah lilitan (koil) dan arus listrik mengalir melalui konduktor, maka terjadi Electromotive Force (EMF). Garis-garis gaya yang terjadi di sekitar konduktor terpusat dalam suatu kumparan.
Bentuk kumparan ini memusatkan EMF dalam satu arah, di mana arah aliran EMF terjadi sepanjang kumparan.
Dengan menambahkan jumlah lilitan konduktor, maka medan magnet yang terjadi akan menguat dan EMF meningkat. Untuk penggunaan solenoid, electromagnet terdiri dari kumparan sederhana yang tidak menghasilkan EMF yang cukup untuk menggerakan tuas dari katup. EMF akan meningkat dengan penggunaan arus listrik yang sama, apabila kumparan konduktor dililitkan pada inti dari besi dibandingkan lilitan tanpa inti.
Gambar 2.9 Prinsip Kerja Solenoid (www.google.co.id)
Seperti ditunjukan pada gambar 2.9, katup ini memiliki dua buah solenoid. Diasumsikan bahwa sinyal terakhir diaplikasikan pada solenoid Y1, aliran udara dari 1 menuju ke 2 dan keluar dari 4 kelubang 5. saat sinyal berpindah dari Y1 disk tetap seimbang dan tidak terjadi perubahan pada bagian saklar katup.
Sinyal diaplikasikan pada solenoid Y2 sehingga mendorong katup dan mengubah aliran udara dari 1 menuju 4 dan pembuangan pada 2 melalui 3.
Gambar 2.10 Katup 5/2 Dengan Penggerak Solenoid Ganda (www.google.co.id)
Lain lagi dengan pegas balik, katup solenoid ganda membalikan dengan posisi saklar terakhir, meskipun tenaga telah dipindahkan dari kedua solenoid, sampai sinyal posisi teraplikasikan. Dalam sirkuit elektro pneumatik mempunyai beberapa keuntungan, diantaranya hanya teraplikasikan durasi sinyal yang sangat cepat dengan sedikit sentuhan (10-25 ms) yang dibutuhkan saklar katup. Suplai tenaga listrik yang dibutuhkan bisa diperkecil. Dalam sirkuit dengan rangkaian aksi yang komplek, posisi silinder ditahan tanpa membutuhkan susunan saklar yang menyulitkan untuk mengancing katup dan posisi silinder.
2.2 Progammable Logic Controller (PLC)
PLC adalah kependekan dari Progammable Logic Controller. Programmable menunjukan kemampuanya dapat diubah-ubah sesuai dengan program yang dapat dibuat dan kemampuannya dalam hal memori program yang telah dibuat. Logic menunjukan kemampuanya dalam hal memproses input secara aritmatik (Aritmatic Logic Unit), yakni melakukan operasi negosiasi, mengurangi, membagi, mengalikan, menjumlahkan, dan membandingkan. Sedangkan Controller menunjukan kemampuannya dalam mengontrol dan mengatur proses sehingga menghasilkan keluaran yang diinginkan.
Bedasarkan IEC 1131, part 1 definisi PLC (Progammable Logic Controller) adalah sebagai berikut :
“PLC adalah suatu peralatan yang bekerja secara digital, yang didesain untuk peralatan industri, yang menggunakan sebuah memori yang dapat diprogram untuk penyimpanan internal dari pengguna yang berorientasi pada perintah-perintah untuk melakukan fungsi-fungsi khusus, seperti logic, sequencing, timing, counting, dan arithmetic, untuk mengotrol berbagai input dan output baik berupa digital maupun secara analog. PLC dan telah didesain sedemikian rupa sehingga keduanya dapat dengan mudah digunakan dalam sistem kontrol industri dan mudah dipergunakan dalam semua fungsi yang diinginkan.”
Pada dasarnya PLC merupakan suatu peralatan mikroprosesor serbaguna yang dirancang khusus untuk dapat bekerja di lingkungan industri yang cukup berat dan kasar, seperti kelembaban udara yang tinggi
dan tingkat polusi debu yang tinggi. Sistem kontrol industri yang menggunakan kontrol PLC mampu mengontrol proses kerja mesin-mesin dengan kehandalan, dayaguna, dan ketelitian yang tinggi.
Perangkat sistem PLC memiliki ciri-ciri sebagai berikut :
Pemrograman yang sangat sederhana.
Program dapat diubah tanpa mempengaruhi sistem.
Lebih ringkas, murah dan lebih mudah pengaturanya dibandingkan dengan sistem kontrol relay.
Sederhana dan mudah perawatannya.
PLC memiliki keunggulan sebagai berikut :
a) Perangkat keras PLC mampu diprogram dan diprogram ulang dengan cepat oleh pemakai dengan sedikit mungkin menimbulkan gangguan pada proses kerja mesin-mesin produksi.
b) Sistem kontrol PLC memiliki perawatan dan perbaikan yang mudah, dimana beberapa indikator dan peralatan bantu telah tersedia sebagai bagian dari sistem, sehingga mudah dalam melacak, menemukan, dan memperbaiki kerusakan.
c) Perangkat PLC lebih kecil dalam pemakaian ruang dan konsumsi daya listrik
d) PLC mampu berkomunikasi dengan sistem pusat pengumpul data untuk keperluan pemantauan operasi dari sentral.
e) Sinyal keluaran dari PLC mampu menjalankan penggerak mekanik motor listrik dan magnet solenoid valve dengan catu daya bolak balik sampai besar arus kerja tipikal maksimum 2A.
f) Perangkat keras sistem kontrol PLC memiliki konfigurasi yang dapat dikembangkan dengan sedikit mungkin perubahan pada sistem.
g) Struktur memori PLC menyediakan fasilitas yang dapat dikembangkan.
h) PLC lebih ekonomis dibandingkan dengan sistem kontrol elektromagnetik bila ditinjau dari segi harga dan biaya pengemasan.
Selain terdapat keunggulan diatas terdapat juga beberapa kekurangan yang dimiliki oleh sistem kontrol PLC : Diantaranya yaitu harganya yang mahal sehingga membutuhkan investasi yang besar. Keadaan lingkungan juga berpengaruh pada PLC, misal pada lingkungan yang memiliki panas yang tinggi. Pada vibrasi yang tinggi penggunaanya juga kurang cocok karena dapat merusak PLC.
2.2.1 Prinsip Kerja PLC
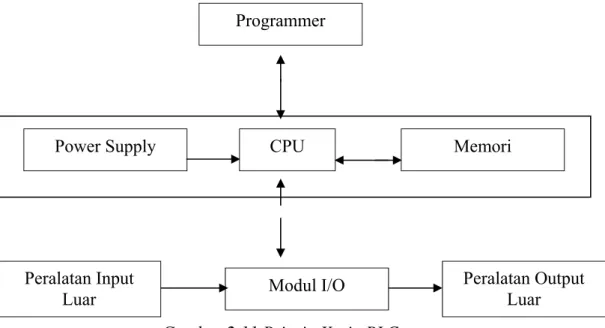
Pada prinsipnya sebuah PLC melalui modul input bekerja menerima data-data berupa sinyal-sinyal dari peralatan input luar (external input device) dari sistem yang dikontrol dan diperlihatkan oleh gambar 3.11. peralatan input dari luar antara lain berupa saklar, tombol dan sensor. Data-data masukan yang masih berupa sinyal analog akan diubah oleh input modul A/D (Analog to digital input module) menjadi sinyal digital. Selanjutnya oleh unit processor
sentral atau CPU (Central Processing Unit) yang ada dalam PLC sinyal digital itu diolah sesuai dengan program yang telah dibuat dan disimpan dalam ingatan (memori). Seterusnya CPU mengambil keputusan dan memberikan perintah melalui modul output dalam bentuk sinyal digital. Kemudian oleh modul output D/A (Digital to Analog Output Module) sinyal digital itu bila perlu diubah lagi menjadi sinyal analog. Pada akhirnya sinyal analog inilah yang mampu menggerakan peralatan output luar (External Output Device) dari sistem kontrol antara lain berupa kontaktor, solenoid valve, heater, alarm dimana nantinya dapat untuk mengoperasikan secara otomatis sistem kerja yang dikontrol tersebut.
Gambar 2.11 Prinsip Kerja PLC 2.2.2 Komponen-komponen PLC
PLC terdiri dari beberapa komponen, yaitu : a. Hardware
b. Software
Programmer
Peralatan Input
Luar Modul I/O
Memori CPU
Power Supply
Peralatan Output Luar
2.2.2.1Hardware
Hardware dalam PLC adalah modul input/output (I/O) yang terdiri dari dua bagian yaitu modul input dan modul output. Terminal masukan dihubungkan dengan sensor-sensor, sedangkan terminal keluaran dihubungkan dengan actuator dalam hal ini adalah katup dengan selenoid.
Beberapa tipe modul I/O antara lain 8, 12, atau 16 modul.
a. Modul input
Modul input dari sebuah PLC adalah modul yang merupakan sebuah penghubung dari sensor-sensor. Sinyal sensor akan dikirimkan ke pengolah sinyal yaitu perangkat komputer.
Modul input memiliki fungsi penting sebagai berikut : Mampu mendeteksi sinyal dengan baik.
Mengubah sinyal kontrol menjadi sinyal logika.
Melindungi komponen elektronik yang sensitif dengan tegangan balik.
Menyaring sinyal. b. Modul Output
Modul output menghubungkan sinyal dari programmer, dalam hal ini adalah sebuah perangkat komputer menuju elemen kendali akhir yaitu aktuator, yang bergantung pada perintah yang diberikan.
Berikut ini fungsi utama dari modul output :
Mengubah sinyal logika menjadi sinyal kontrol.
Melindungi komponen elektronik sensitif dari tegangan balik dari perangkat komputer.
Melindungi modul output dari hubungan arus pendek dan beban berlebih.
Meningkatkan daya untuk aktuasi elemen kendali akhir utama yaitu silinder pneumatik.
2.2.2.2 Software
Software yang dimaksudkan adalah bahasa pemograman yang dilakukan dalam membuat program perintah yang digunakan untuk mengontrol sistem pneumatik.
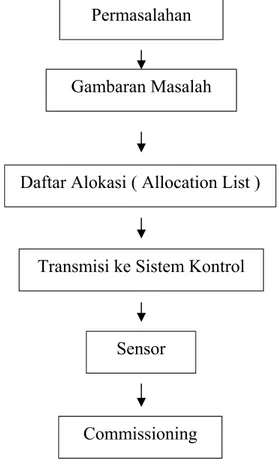
Dalam pembuatan program PLC harus diperhatikan prosedur dan urutan langkah yang harus dilakukan. Berikut ini merupakan diagram alir untuk prosedur pembuatan program.
Gambar 2.12 Diagram Alir Prosedur Pemrograman
Bahasa pemograman yang digunakan adalah sebagai berikut : a) Diagram ladder (LDR)
Diagram ladder (tangga) merupakan diagram kontrol pada PLC. Diagram ini dinamakan tangga karena bentuknya menyerupai tangga. Pada gambar 3.15 sebuah diagram ladder tersusun dari beberapa simbol-simbol kotak A, B, C dengan keluaran X dan Y. pada pengambaran diagram tangga dikenal dengan simbol-simbol sebagai berikut :
Permasalahan
Gambaran Masalah
Sensor
Transmisi ke Sistem Kontrol Daftar Alokasi ( Allocation List )
Saklar Normally Open (NO), saklar ini menandakan keadaan saklar yang normalnya pada posisi OFF / terbuka, dan akan ON / terhubung jika relay telah dialiri listrik.
Gambar 2.13 Simbol NO
Saklar Normally Closed (NC), saklar ini menandakan keadaan saklar yang normalnya pada keadaan ON / tertutup, jadi jika saklar tersebut jika diaktifkan maka akan menjadi OFF / terbuka.
Gambar 2.14 Simbol NC
Keluaran dapat berupa relay yang akan mengaktifkan kontak-kontak sensor NO dan NC.
a. Gerbang Logika
Pada bahasa pemograman PLC juga terdapat gerbang logika. Gerbang merupakan sebuah rangkaian dengan satu atau beberapa masukan yang akan menghasikan satu buah keluaran bila diberi masukan. Pada dasar nya gerbang logika dapat dianalogikan sebagai saklar. Saklar mempunyai dua buah keadaan yaitu ON
(terhubung) atau OFF (terputus). Pada sistem digital dikenal dengan keadaan “1” untuk keadaan ON dan “0” untuk keadaan OFF.
Gerbang AND
Gerbang logika AND dianalogikan seperti susunan beberapa buah saklar yang terhubung secara seri. Susunan saklar ini akan menghasilkan satu keluaran jika semua saklar masukan dalam keadaan terhubung.
Tabel 2.1 Tabel Kebenaran Gerbang Logika AND Input 1 Input 2 Input 3 0 0 1 1 0 1 0 1 0 0 0 1
Dari tabel akan terlihat bahwa output akan selalu 0 jika hanya ada satu input yang bernilai 1 dan output akan bernilai 1 jika kedua input bernilai 1. Bila gerbang logika AND diatas dituliskan sebagai suatu susunan diagram tangga dan statement list maka akan membentuk suatu susunan seperti gambar berikut ini :
IF INPUT 1 AND INPUT 2 THEN SET OUTPUT
Gambar 2.15 Ladder dan Statement list AND
Gerbang OR
Gerbang logika OR merupakan merupakan susunan beberapa buah saklar yang terhubung secara parallel. Susunan ini akan memberikan keluaran jika sesuatu atau lebih saklar tersebut terhubungkan .
Tabel 2.2 Tabel Kebenaran Gerbang Logika OR Input 1 Input 2 Input 3 0 0 1 1 0 1 0 1 0 1 1 1
Dari table datas terlihat output akan selalu bernilai 1 jika salah satu ataupun kedua input bernilai 1 dan output akan bernilai 0 jika kedua input bernilai 0.
Bila gerbang OR diatas dituliskan sebagai suatu susunan diagram tangga dan statement list maka akan terbutuk suatu susunan seperti gambar berikut ini :
Gambar 2.16 Ladder dan Statement list OR
Gerbang NAND (Not AND)
Gerbang NAND merupakan kebalikan dari gerbang AND.
Gerbang NAND merupakan gabungan antara gerbang AND dan NOT, yang berarti keluaran dari gerbang logika AND yang dibalik (invers).
Tabel 2.3 Tabel Kebenaran Gerbang Logika NAND Input 1 Input 2 Input 3 0 0 1 1 0 1 0 1 1 1 1 1
Dari table datas terlihat output yang bernilai 1 jika salah satu atau tidak kedua input bernilai 1 dan output akan bernilai 0 jika kedua input bernilai 1. Bila gerbang NAND diatas dituliskan sebagai suatu susunan diagram tangga dan statement list maka akan terbentuk suatu susunan seperti gambar berikut ini :
Gambar 2.17 Ladder dan Statement list NAND
Gerbang NOR (NOT OR)
Gerbang NOR merupakan kebalikan dari gerbang OR.
Gerbang NOR merupakan gabungan antara gerbang OR dan NOT, yang berarti keluaran dari gerbang logika OR yang dibalik (invers).
Tabel 2.4 Tabel Kebenaran Gerbang Logika NOR Input 1 Input 2 Input 3 0 0 1 1 0 1 0 1 1 0 0 0
Dari table datas terlihat output yang bernilai 1 jika kedua input bernilai 0 dan output akan bernilai 0 jika jika salah satu ataupun kedua input bernilai 1. Bila gerbang NOR diatas dituliskan sebagai suatu susunan diagram tangga dan statement list maka akan terbentuk suatu susunan seperti gambar berikut ini :
Gambar 2.18 Ladder dan Statement list NOR 2.2.3 Programmer
Programmer dalam PLC merupakan suatu perangkat dari computer yang terdiri dari monitor, Central Prosesing Unit (CPU), dan kelengkapanya. Pemrogram dapat berupa console.
Dengan menggunakan perangkat computer data akan diolah dalam CPU. CPU mengontrol dan menjalankan semua operasi dalam PLC. Pada dasarnya adalah sebuah unit yang berisi microprosesor yang menginterpretasikan sinyal-sinyal input dan tindakan pengontrolan, sesuai dengan program yang tersimpan dalam memori. Lalu mengkomunikasikan keputusan-keputusan yang diambilnya sebagai sinyal-sinyal kontrol ke modul output.
2.2.4 Sensor
Sensor pada PLC ada 2 macam : a) Dengan kontak (Roller)
Sensor ini berkotak lansung dengan aktuator. Pada alat pencetak tablet digunakan sensor kotak yang mempunyai penggerak tuas rol dan pengembali pegas. Sensor berfungsi sebagai saklar pembatas / limit switch yang bekerja jika diberi tekanan mekanik dan tidak bekerja jika tekanan mekanik dihilangkan.
Gambar 2.19 Limit switch (www.google.co.id)
b) Tanpa kontak (Proximity Switch)
Sensor ini bekerja tanpa berkotak langsung dengan aktuator. Contohnya sensor warna, sensor logam, sensor cahaya, dan lain-lain. Pada alat pencetak tablet ini tidak menggunakan sensor tanpa kotak.
Gambar 2.20 Proximity Switch (www.google.co.id)