ALIH TEKNOLOGI DUNIA PADA SISTEM ROBOTIKA BIDANG PERTAHANAN KEAMANAN NASIONAL
DI PUSLIT TELIMEK LIPI
Hendri Maja Saputra, Sapdo Utomo, Rifa Rahmayanti
Pusat Penelitian Tenaga Listrik dan Mekatronik - LIPI
Komplek LIPI, Jl. Cisitu No. 21/154D, Gd. 20, Bandung, 40135, Telp. (022) 2503055 hend018@lipi.go.id
ABSTRAK
Adanya isu politik dan ekonomi menjadi salah satu faktor ancaman pertahanan keamanan (hankam) negara. Ancaman tersebut diantisipasi denganmeningkatkan kemandirian nasional dalam bidang hankam. Salah satu upaya dalam mencapai hal tersebut adalah dengan meningkatkan alih teknologi agar mudah digunakan dan disesuaikan dengan kebutuhan. Saat ini robot banyak digunakan sebagai pengganti peran manusia terutama di lingkungan yang berbahaya, hal tersebut juga menjadi tren pada teknologi militer dunia.
Berdasarkan isu-isu yang ada dan permintaan dari pengguna di bidang hankam, maka telah diiplementasikan MobileRobot untuk aplikasi robot penjinak bom (Morolipi V1 dan Morolipi V2) dan Remote Controlled Weapon System (RCWS) sebagai salah satu hasil alih teknologi militer yang diperlukan oleh Indonesia saat ini. Morolipi dapat berfungsi untuk mengevakuasi benda berbahaya dan juga dapat dikirim untuk memantau teroris.
Morolipi juga telah dikolaborasikan dengan RCWS, sehingga dapat digunakan pada garda belakang maupun garda depan. Purwarupa RCWS yang dihasilkan mengadopsi teknologi yang banyak digunakan pada kendaraan tempur, hanya saja spesifikasinya dan kemampuannya masih terbatas karena perbedaan yang signifikan terkait anggaran yang digunakan. Alih teknologi ini diharapkan dapat menjadikan kemandirian alutsista dengan memaksimalkan komponen-komponen dalam negeri dan sumber daya manusia yang ada.
Kata Kunci: alih teknologi ,hankam, morolipi, robotika, RCWS
PENDAHULUAN
Pesatnya perkembangan teknologi di semua bidang di negara maju menjadi salah satu faktor acuan teknologi di negara berkembang. Hal tersebut memberikan dampak positif dan negatif pada masyarakat. Dampak positifnya adalah terjadinya alih teknologi di berbagai bidang sehingga dapat meningkatkan kualitas perkembangan teknologi industri dan ekonomi dari negara tersebut. Dampak negatifnya adalah adanya ancaman terhadap pertahanan dan keamanan Negara dan penjajahan modern di bidang ekonomi.
Pertahanan militer Amerika telah sukses menggunakan robot secara luas di bidang hankam, seperti untuk mengumpulkan informasi pengintaian, pendukung sistem logistik, melaksanakan operasi tempur, melindungi personel bahkan untuk mengevakusi personel yang terluka (Barnes et al., 2014). Tantangan teknologi dunia di masa depan di bidang hankam adalah merancang human-robot yang cerdas, otonom, sederhana, mudah dioperasikan dan meminimalisasikan beban kerja operator (Chen & Barnes, 2013).Saat ini kendaraan darat tanpa awak (UGV) secara aktif dikembangkan sejalan dengan teknologi robotika yang lain untuk meminimalisasi peran manusia baik untuk keperluan sipil ataupun militer di lingkungan yang berbahaya (Gage, 1995; Lee, 2012).Sebagai persiapan dalam melakukan inovasi di masa depan maka diperlukan pengekplorasian serta pengindetifikasian potensi masalah dari isu-isu yang ada dan mensimulasikannya sehingga dapat dikembangkan suatu robot yang belum pernah ada (Swiecicki, Elliott, &
Wooldridge, 2015). Berdasarkan hukum kemanusian internasional, hingga saat ini belum ada peraturan internasionaltentang pelarangan terhadap perkembangan robot otonom dan remote weapon system(Liu, 2012).
Saat ini untuk mengimbangi pesatnya perkembangan teknologi hankam di dunia maka diadakan percepatan penelitiaan dan pengembangan penguasaan teknologi dengan cara alih teknologi, fordward engineering dan reverse engineering(Kementrian Riset dan Teknologi, 2006). Salah satu tujuan nasional Republik Indonesia adalah kemampuan untuk menyediakan alat peralatan pertahanan keamanan dari industri dalam negeri yang mandiri (DPR dan Presiden Republik Indonesia, 2012).
Makalah ini membahas tentang alih teknologi dunia pada bidang hankam khususnya dalam bidang robotika yang telah ditelitioleh Pusat Penelitian Tenaga Listrik dan Mekatronik, Lembaga Ilmu Pengetahuan Indonesia.Alih teknologi ini diharapkan
dapat menjadikan kemandirian alutsista dengan memaksimalkan komponen-komponen dalam negeri dan sumber daya manusia yang ada (Mirdanies et al., 2013).
METODOLOGI
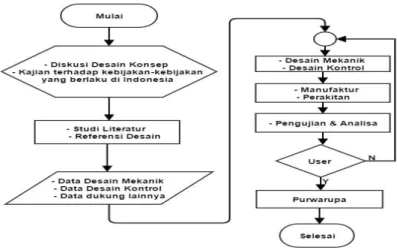
Penelitian rancang bangun robotik di bidang hankam dimulai dengan diskusi desain konsep yang dibutuhkan oleh pengguna (TNI atau Polri) serta pengkajian kebijakan-kebijakan yang berlaku di Indonesia. Setelah desain konsep disepakati, selanjutnya dilakukan studi literatur dan survei untuk menentukan rancangan yang tepat dengan komponen-komponen yang tersedia dipasaran, proses manufaktur, perakitan, pengambilan data hasil dari eksperimen, uji coba lapangan,evaluasi, dan perbaikan disertai penyempurnaan desain manufaktur jika diperlukan.
Studi literatur selain dengan analisa teori dan analisa persamaan yang digunakan juga dilakukan melalui survei data mengenai teknologi yang telah ada khususnya yang telah dibuat oleh suatu perusahaan. Data-data yang didapatkan kemudian digunakan sebagai acuan untuk perancangan desain sistem dan simulasi. Bersamaan dengan proses tersebut, dilakukan juga proses evaluasi awal terhadap purwarupa dengan pendataan ulang komponen serta klarifikasi untuk pemilihan komponen mana yang akan tetap digunakan dan juga mana komponen yang memerlukan peningkatan kualitasnya.
Pada saat perbaikan, penyempurnaan desain manufaktur dan optimasi akan dilakukan sejalan dengan proses uji coba terutama jika terjadi kerusakan atau pada saat dibutuhkan penyesuaian untuk peningkatan spesifikasi dari purwarupa yang dibuat.
Gambar 1 menjelaskan alur kegiatan penelitian yang telah dilakukan.
Gambar 1. Alur penelitian bidang hankam Puslit Telimek
HASIL DAN PEMBAHASAN
Kegiatan penelitian alih teknologi di bidang hankam yang telah dilakukan maka diperoleh hasil antara lain: Morolipi, Robot Bersenjata, dan Remote Controlled System (RCWS), seperti diilustrasikan pada Gambar 2.
Gambar 2. Alih teknologi yang telah dikembangkan
Penelitian alih teknologi bidang hamkam dilakukan dengan membandingkan teknologi pembuatan robot militer yang telah ada dengan kebutuhan yang diperlukan, terlihat pada Gambar 2 yang menjadi acuan dari pembuatan purwarupa morolipi, robot bersenjata, dan RCWS.
Morolipi
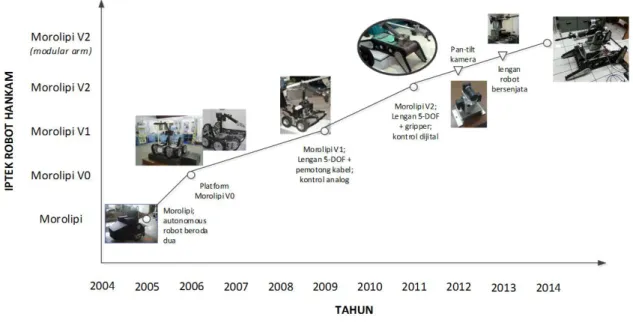
Penelitian tentang teknologi yang dimiliki yaitu mobil robot penjinak bom morolipi ini dimulai sejak tahun 2004 sampai tahun 2014, perkembangan teknologi dan fitur alih teknologi dari morolipi diilustrasikan pada Gambar 3. penelitian dimulai
darirobot otonom beroda dua hingga nantinya akan digabungkan dengan robot lengan bersenjata.
Gambar 3. Perkembangan morolipi
Morolipi terdiri dari lengan 5- DOF, gripper yang dapat digunakan sebagai pemotong kabel dan juga memindahkan barang, kontrol digital, dan pan-tilt kamera.
Morolipi ini juga memiliki kemampuan untuk menaiki dan menuruni tangga dengan kemiringan sampai 45O dengan tinggi anak tangga sampai 30 cm, dengan sistem pan-tilt kamera morolipi dapat mentrack berbagai macam bentuk objek bergerak sesuai dengan yang dipilih di awal proses tracking.
Gambar 4. Purwarupa morolipi V1
Tabel 1. Spesifikasi purwarupa morolipi V1
Gambar 5. Purwarupa Morolipi V2
Spesifikasi Satuan
PxLxT 1050x920x1200 mm
Berat Kotor 190 kg
Daya Angkut 100 kg
Daya Angkat 5 kg
Sistem Penggerak 4 – roda 2-track / FIX
Ketinggian Maksimum Manipulator 1500 mm
Ground Clearence 5 cm
Flippers 4 statik Flippers / FIX
Manipulator 5 DOF
End Effector Wire cutter
Stair Climbing 16 degree / depend on friction
Obstacles 150 mm (height)
Kecepatan Maksimum 2 km/h
Derajat Kemiringan Pendakian 16o / tergantung pada penampang jalur
Rintangan 150 mm (tinggi)
Tabel 2. Spesifikasi purwarupa morolipi V2
Robot Bersenjata
Robot bersenjata merupakan teknologi lanjutan dari morolipi dengan pemasangan lengan bersenjata 2-DOF (azimut-elevasi) atau yang disebut turret menggantikan lengan 5-DOF. Lengan bersenjata ini dilengkapi dengan kamera yang dipasangkan secara paten pada platform sebagai identifikasi sasaran (objek/benda) yang diinginkan untuk selanjutnya menembak sasaran tersebut.
Gambar 6. Purwarupa morolipi V2 dengan lengan bersenjata 2-DOF
Spesifikasi Satuan
PxLxT 800 x 450 x 300 mm
Berat Keseluruhan 81 kg
Daya Angkut 100 kg
Daya Angkat 5 kg
Sistem Penggerak 8 – roda /4-track/2-track /drive (modular) Ketinggian Maksimum Manipulator 2000 mm
Ground Clearence 5 cm
Flippers 4 statik Flippers
Manipulator 5 DOF
End Effector Gripper
Stair Climbing 16 degree / depend on friction
Obstacles 150 mm (height)
Kecepatan Maksimum 7.2 km/h
Derajat Kemiringan Pendakian 16o / tergantung pada penampang jalur
Rintangan 150 mm (tinggi)
Remote Controlled Weapon System (RCWS)
Pada RCWS digunakan mekanisme 2-DOF (azimut-elevasi) untuk senapan mesin sedang dengan kaliber 7.62 mm yang dapat dikendalikan secara manual dan otomatis menggunakan joystick, dapat mendeteksi target dari sisi warna atau bentuk target dan adanya stabilisasi lengan terhadap platform sehingga lengan dapat mengkompensasi pergerakan platform ketika beroperasi.
Gambar 7. Purwarupa Remote Controlled Weapon System
Skema Kerja Sama
Gambar 8. (a) Skema kolaborasi periode 2010-2014, (b) Skema kolaborasi periode 2015-2019
Pada Gambar 8 (a) Pusat Penelitian Tenaga Listrik dan Mekatronik mengambil data dari pihak TNI/POLRI dan juga dari Litbang. Data yang diperoleh kemudian
digunakan sebagai acuan untuk pembuatan purwarupa yang sesuai dengan kebutuhan dari pengguna. Harapannya dari purwarupa yang telah teruji pada skala lab dapat diproduksi oleh pihak industry, sehingga memudahkan pengguna untuk memanfaatkannya.
Kenyataan yang terjadi dilapangan adalah skema kolaborasi belum dapat berjalan dengan baik karena adanya kendala dengan pihak industri.
Pada periode 2015-2019 ini, dirancangkan skema kolaborasi yang baru dimana Pusat Penelitian Tenaga Listrik dan Mekatronik akan melakukan penelitian berdasarkan permintaan dari industri. Permintaan industri tersebut juga dipengaruhi dari kebutuhan pihak TNI/POLRI sebagai pihak pengguna.
KESIMPULAN DAN SARAN
Telah dilakukan alih teknologi Mobile Robot, Lengan bersenjata dan Remote Controlled Weapon System (RCWS) kaliber 7.62 mm yang diharapkan dapat digunakan dan juga sebagai bahan acuan untuk perkembangan sistem persenjataan lebih lanjut di bidang pertahanan. Selain itu juga memberikan dampak dari segi ekonomi yaitu pengurangan tingkat ketergantungan terhadap produk impor sehingga dapat menghemat devisa negara dan juga apabila sistem ini dapat diintegrasikan dan dikembangkan sampai tahap produksi di dalam industri, harapannya dapat membuka lapangan perkerjaan sehingga terjadi peningkatan kesejahteraan. Selain itu juga diharapkan dapat membantu meningkatkan kemampuan TNI yang secara teknis menjadikan alutsista lebih kuat dan efektif sehingga dapat mengurangi kekhawatiran terhadap embargo oleh negara lain.
REKOMENDASI
Selama ini terjadi kendala dalam hal pengujian lapangan dikarenakan keterbatasan akses dibidang hankam, sehingga data yang didapatkan belum sesuai dengan kebutuhan pengguna. Harapannya, pada penelitian selanjutnya mendapatkan dukungan penuh dari pengguna (TNI dan Polri), sehingga hasil penelitian dapat benar-benar dimanfaatkan langsung oleh pengguna.
UCAPAN TERIMA KASIH
Terima kasih yang sebesar-besar kami sampaikan kepada Kelompok Penelitian Mekatronik di Pusat Penelitian Tenaga Listrik dan Mekatronik, Lembaga Ilmu Pengetahuan Indonesia atas kerjasama yang sangat solid sehingga mampu menghasilkan purwarupa-purwarupa yang menjadi tonggak penelitian di masa yang akan datang.
DAFTAR PUSTAKA
Barnes, M. J., Chen, J. Y. C., Jentsch, F., Oron-Gilad, T., Redden, E., Elliott, L., & Evans, A. W.
(2014). Designing for Humans in Autonomous Systems: Military Applications, (January), 1–30.
Chen, J. Y. C., & Barnes, M. J. (2013). Human-Agent Teaming for Multi-Robot Control : A Literature Review, (February).
DPR dan Presiden Republik Indonesia. Undang-undang Republik Indonesia No. 16 Tahun 2012 tentang Industri Pertahanan, Pub. L. No. 16 Tahun 2012 (2012). Indoneisa.
Gage, D. W. (1995). UGV HISTORY 101: A Brief History of Unmanned Ground Vehicle (UGV) Development Efforts. Unmanned Systems, 13(3), 9–32. Retrieved from
http://oai.dtic.mil/oai/oai?verb=getRecord&metadataPrefix=html&identifier=AD A422845
Kementrian Riset dan Teknologi. (2006). Indonesia 2005 - 2025 Buku Putih. Jakarta.
Lee, J. P. (2012). Future unmanned system design for reliable military operations. International Journal of Control and Automation, 5(3), 173–186.
Liu, H.-Y. (2012). Categorization and legality of autonomous and remote weapons systems.
International Review of the Red Cross, 94(886), 627–652.
http://doi.org/10.1017/S181638311300012X
Mirdanies, M., Saputra, H. M., Subekti, R. A., Susanti, V., Nugraha, A. S., Rijanto, E., &
Hartanto, A. (2013). Kajian Kebijakan Alutsista Pertahanan dan Keamanan Republik Indonesia. (A. Hartanto, Ed.). Jakarta: Lipi Press.
Swiecicki, C. C., Elliott, L. R., & Wooldridge, R. (2015). Squad-Level Soldier-Robot Dynamics : Exploring Future Concepts Involving Intelligent Autonomous Robots, (February).