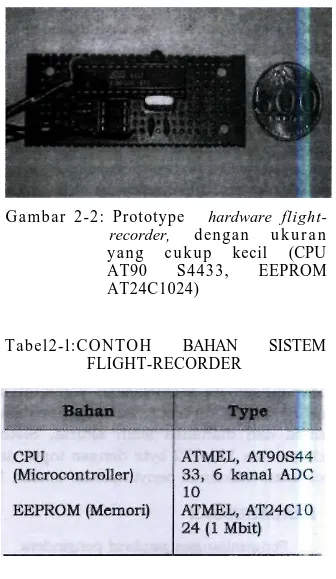
RANCANG-BANGUN SISTEM FLIGHT-RECORDER SEDERHANA UNTUK PELUNCURAN ROKET
Teks penuh
Gambar
Dokumen terkait
Memperoleh informasi yang lengkap mengenai diagnosis, asesmen medis, rencana perawatan, detail kontak yang dapat dihubungi, dan informasi relevan lainnya mengenai rencana
Evaluasi dilakukan terhadap hasil percontohan yang telah dilakukan pada usaha puyuh dan ayam broiler (1) wawasan terkait teknis yang sesuai standar GFP, perbaikan
Pengujian tersebut dilakukan dengan tujuan untuk menguji apakah hipotesis penelitian yang hanya diuji dengan data sampel dapat diberlakukan untuk populasi atau
Pada bab ini dijelaskan tentang landasan teori yang terdiri dari sistem tenaga listrik, sistem transmisi tenaga listrik, aliran daya, kestabilan sistem tenaga
Bibit tanaman hasil iradiasi sinar gamma dengan dosis 32,5 Gy yang ditanam dalam 5 botol hanya menghasilkan 43 tanaman yang hidup.. HasH pengukuran bagian-bagian bunga disajikan
Jenis pendidikan yang satu ini dilakukan atas kesadaran serta rasa tanggung jawab dari siswa itu sendiri. Jalur pendidikan yang satu ini dilakukan secara mandiri. Hal
NPM NAMA MAHASISWA
Pada penelitian ini akan di analisa perbandingan algortima pengurutan data, yaitu: bubble sort, merge sort, dan quick sort untuk mendapatkan waktu proses yang baik dalam
