Setelah mengikuti perkuliahan ini di
harapkan mahasiswa dapat :
1. Dapat menjelaskan aksi kendali elemen pengendali P, I, D, PI, PID
Kendali otomatis adalah membandingkan
harga yang sebenarnya dari keluaran plant
dengan harga yang diinginkan, menentukqn
deviasi dan menghasilkan suatu sinyal
Cara kendali otomatis menghasilkan sinyal
Klasifikasi kendali otomatis di
industri
1.
Kendali dua posisi atau on – off
2.
Kendali Proporsional
3.
Kendali Integral (I)
4.
Kendali Proporsional Integral ( PI )
5.
Kendali Proporsional Deferensil ( PD)
Sebagian besar kendali Otomatis di industri
menggunakan listrik atau fluida tekan
Gambar 1.Diagram Blok Kendali Otomatis
dengan elemen ukur
Dari gambar 1 :
Kendali terdiri dari detektor kesalahan dan
penguat.
Elemen ukur adalah perangkat yang merubah
variabel keluaran menjadi besaranlain yang
sesuai, seperti perpindahan, tekanan atau sinyal
listrik sehingga dapat digunakan untuk
membandingkan antara sinyal keluaran dengan
sinyal masukan acuan.
Penguat berfungsi untuk memperkuat sinyal
kesalahan yang selanjutnya akan dimasukkan
ke aktuator.
Aktuator berfungsi untuk merubah masukan
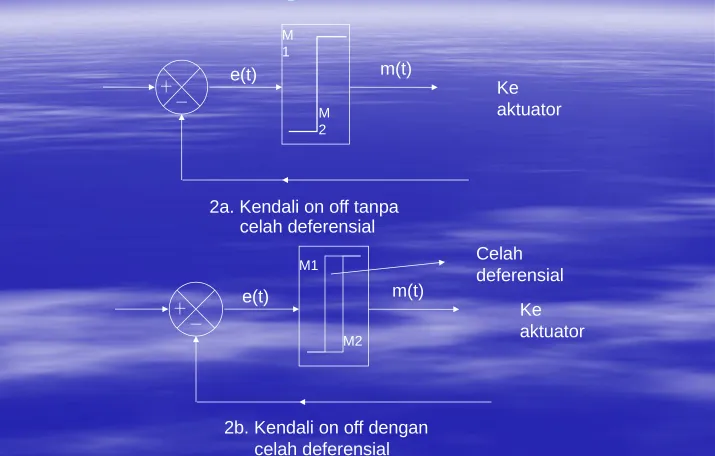
Kendali dua posisi atau ON OFF
Kendali dua posisi adalah kendali yang
Dari Gambar 2
Sinyal keluaran kendali adalah m(t) sinyal
kesalahan penggerak adalh e(t). Pada
kendali dua posisi, sinyal m(t) akan tetap
pada harga maksimum atau minimum
tergantung sinyal kesalahan penggerak,
positip atau negatif, sehingga
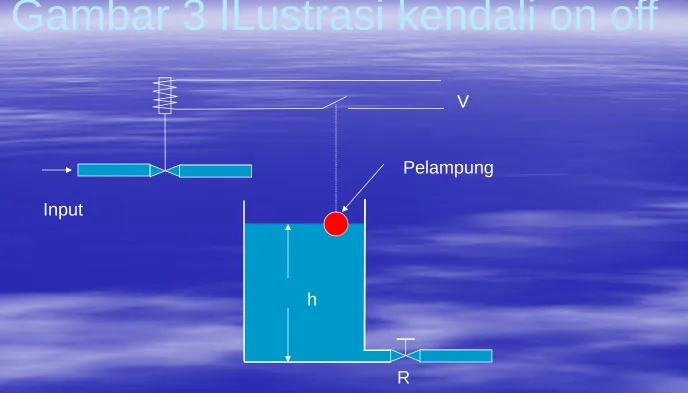
Gambar 3 ILustrasi kendali on off
R
V
Pelampung
Input
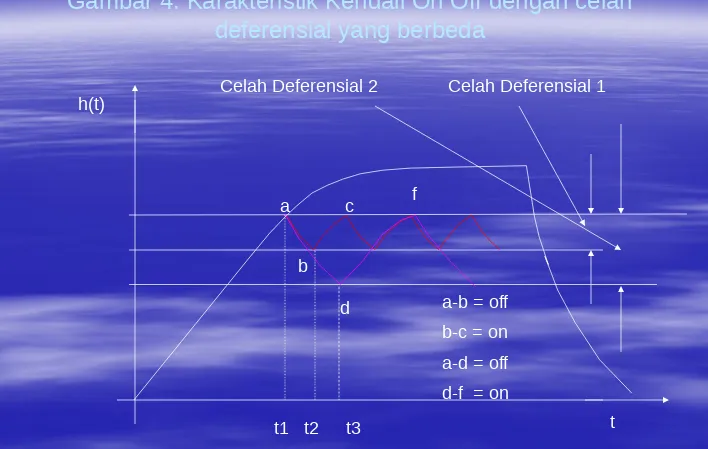
Gambar 4. Karakteristik Kendali On Off dengan celah deferensial yang berbeda
h(t)
t Celah Deferensial 1
a Celah Deferensial 2
t1 t2 d
f
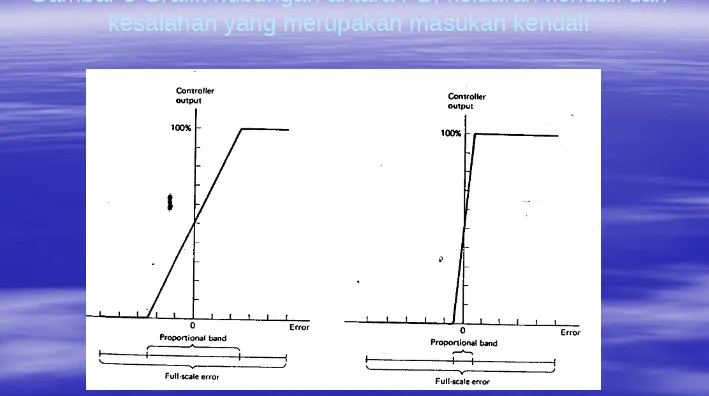
KENDALI PROPORSIONAL
Kendali Proporsional adalah kendali yang memilki
keluaran yang sebanding/proporsional dengan
besarnya sinyal kesalahan.
kendali proporsional memiliki 2 parameter, pita
proporsional (
proportional band
) dan konstanta
proporsional. Daerah kerja kontroller efektif
dicerminkan oleh Pita proporsional (PB), sedangkan
konstanta proporsional (Kp) menunjukkan nilai
Hubungan antara pita proporsional (PB)
dengan konstanta proporsional (Kp)
ditunjukkan secara prosentasi oleh persamaan
berikut:
PB =
1
x
100
%
Dari Gambar 5 terlihat bahwa ketika
konstanta proporsional bertambah semakin
tinggi, pita proporsional menunjukkan
Perubahan pada sinyal masukan akan segera menyebabkan sistem
secara langsung merubah keluarannya sebesar konstanta pengalinya.
Ke
aktuator E(s) M(s)
Kp
Dari Gambar 6 maka nilai Kp adalah Kp = M(s)/E(s) atau M(s) = Kp . E(s)
Dimana Kp adalah Konstanta Proporsional, dari
persamaan tersebut terlihat pada kendali proporsional nilai E (s) tidak boleh sama dengan nol, untuk itu pada kendali proporsional M(s) selalu diperlukan sarat awal, agar kendali proporsional dapat mulai beroperasi
Dari Gambar 6 jika sinyal error E(s) bernilai positif akan mempercepat tercapainya hargayang diinginkan jika negatif akan memperlambat tercapainya harga yang diinginkan.
Karakteristiknya :
overshoot tinggi
waktu penetapan besar periode osilasi sedang
adanya offset/droop/steady-state error ( offset adalah
selisih antara setpoint atau sinyal masukan acuan dengan sinyal akhir terkendali atau control point )
Konstanta Proporsional Kp sangat mempengaruhi error,
Seperti teleh dijelaskan bahwa pada kendali
proporsional selalu terjadi offset
Perhatikan diagram blok berikut ini :
E(s) M(s)
Kp A
R(s)
Sistem dengan transfer fungsi A di kendalikan oleh
kendali proporsional dengan penguatan Kp. Dari
Diagram Blok diperoleh transfer fungsi
keseluruhan adalah :
R ( s )
Jika fb = 1 maka persamaan akan menjadi
R(s)
M(s) = Jika Kp.A = X maka
R(s) M(s) =
Perhatikan nilai didalam kurung tidak pernah diperoleh hasil 1
selalu < 1
Perhatikan Tabel berikut
Misal Setpoint , R(s) = 5 maka diperoleh M(s)
sebagai berikut
X M(s) Offset
0.01 0.0495 4.9505 0.1 0.4545 4.5455 0.5 1.6667 3.3333 1 2.5000 2.5000 2 3.3333 1.6667 3 3.7500 1.2500 10 4.5455 0.4545 50 4.9020 0.0980 100 4.9505 0.0495 1000 4.9950 0.0050 10000 4.9995 0.0005
Terlihat bahwa Besar sinyal terkendali M(s) tidak
pernah sama dengan nilai setpoint ( 5 )
Rangkaian Elektronika Kendali
Proporsional
Keterangan Gambar
Dari gambar rangkaian elektromika kendali
proporsional Op amp U1 menghasilkan sinyal ( e =
SP-PV ; SP = set point ; PV= process variable).
Op amp U2 berfungsi sebagai kendali
proporsional.
Op amp U3 berfungsi untuk membalik keluaran
U2.
Dioda zener berfungsi untuk membatasi tegangan
Biasanya Rf = Ros sehingga :
Dari gambar rangkaian elektronika kendali
proporsional maka tegangan keluaran
adalah
:Vos
Ros
Rf
Verror
Ri
Rf
Pada saat tidak ada error
Verror = 0 Vout = Vos
Tegangan ini di
tunjukkan pada posisi e pada gafik tansfer
Kemiringan dari kurva fungsi transfer
ditentukan oleh besarnya penguatan yang
diterima oleh Verror oleh inverting amplifier
m= Rf/Ri
Latihan1
Dari gambar rangkaian elektronika untuk kendali
proporsional diketahui :
Vsp = 6 Volt
Vos = 5 Volt
Ros = Rf = 100 K ohm
Ri = 22 K ohm
Vz ( tegangan output maksimum) = 10 Volt
Hitung :
a.
Vout pada Vpv = 5,5 Volt
Penyelesaian
a.
Verror = Vsp – Vpv
= 6 – 5,5
= 0,5 Volt
Vout = ((Rf/Ri) x Verror) + Vos
= ((100/22)x0,5) + 5
b.
Verror = Vsp – Vpv
= 6 – 4
= 2 Volt
Vout = ((Rf/Ri) x Verror) + Vos
= ((100/22)x2) + 5
= 14 Volt
Karena tegangan output dibatasi oleh
tegangan maksimum pada dioda zener
Latihan2
Design sebuah kendali proporsional dengan
ketentuan sebagai berikut :
Proporsional band ( pita proporsional) = 67 %
Error maksimum = 3 Volt
Skala maksimum tegangan keluaran = 16 Volt
Zero error berada pada titik 25% dari keluaran
Penyelesaian
Jika pada saat error tegangan keluaran adalah 25% maka
tegangan out adalah
Vout = 0,25 X 16 Volt = 4 Volt Error maksimum = 3 volt
Sehinggga skala error maksimum adalah 6 volt Nilai penguatan (m) adalah
m= Rf/Ri = Vout(FS)/(PB x Verror(FS)
= 16 Volt /(67% x 6 Volt ) = 3,98 ~ 4
Untuk menentukan nilai komponen, Ros=Rf = 100 K ohm
pada saat
Verror = 0 berlaku
Vos= Vout = 4 Volt ( 25 % dari keluaran maksimum )
Dengan data Vos = 4 Volt dan m (Kp)= 4
Maka kurva transfer dapat kita gambar sbb :
Vos = 4 volt ; Verror=0
Y = 4
(sumbu Vout)
Karena nilai potensiometer R1 jauh lebih kecil
dibandingkan Ros agar nilai tegangan offset (Vos) dapat kita atur maka kita tetapkan nilai petensiometer R1= 5 K ohm
m= Rf/Ri
Ri= Rf/m = 100/ 4 = 25 K ohm
Karena nilai Ri dan seri dengan R1 maka dicari nilai R total
yang mendekati 25 K ohm antara potensiometer R1 dan Ri.
KENDALI INTEGRAL
kendali integral mempunyai beberapa karakteristik berikut ini:
Keluaran kendali membutuhkan selang waktu
tertentu, sehingga kendali integral cenderung
memperlambat respon.
Ketika sinyal kesalahan berharga nol, keluaran
kendali akan bertahan pada nilai sebelumnya.
Jika sinyal kesalahan tidak berharga nol, keluaran
akan menunjukkan kenaikan atau penurunan
yang dipengaruhi oleh besarnya sinyal kesalahan
dan nilai Ki
Konstanta integral Ki yang berharga besar akan
Transfer fungsi dari kendali integral
M(s)/E(s) = Ki/s
Ke
aktuator E(s) M(s)
• Dari gambar terlihat bahwa semakin besar error maka
keluaran kendali integral akan semakin curam ( error ab > error bc > error cd)
• Pada error de bernilai = 0 keluaran kendali sama dengan harga sebelumnya yaitu harga maksimum keluaran kendali dari titik error cd
• Pada error fg bernilai = 0 keluaran alat kendali sama
dengan harga sebelumnya yaitu harga minimum keluaran kendali titik error ef
• Keluaran alat kendali akan naik jika error bernilai positif ( titik error abcd dan g)
• Keluaran alat kendali akan naik jika error bernilai positif ( titik error abcd dan g)
Diagram Kotak Alat Kendali
Ki/s
E(s) M(s)
E(s) M(s)
E(s) U M(s)
Hubungan masukan dan
keluaran alat kendali integral
E (%)
Semakin besar
konstanta integrasi Ki maka semakin besar pula laju keluaran alat kendali dengan kata lain kecuraman
•
Dari gambar maka hubungan
tegangan dan arus pada kapasitor
adalah :
•
Dengan mensubstitusikan
persamaan arus ketegangan
didapat :
•
Ki adalah konstanta integrasi ( per
detik )
KENDALI PROPORSIONAL
INTEGRAL
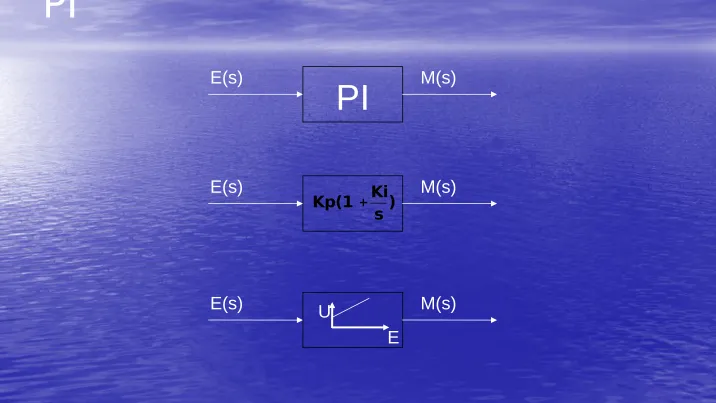
•
Alat kendali proporsional integral (PI)
adalah kombinasi dari kendali Proporsional
dan integral. Persamaan dari kendali PI
Maka fungsi alih dari
pengendalian PI adalah :
Gambar Diagram Blok Kendali
PI
PI
E(s) M(s)
E(s) M(s)
E(s) U M(s)
E
•
Jika masukan pengendalian diberikan
sinyal dengan fungsi step maka
tanggapan yang terjadi pada
keluaran kendali adalah kendali
proporsional akan memberikan
respon awal dan dilanjutkan oleh
kendali integal hingga keadaan stabil
dan error berhasil dihilangkan,
Respon alat kendali PI dengan
sinyal step
E (%)
Waktu %
Kp 2Kp
KENDALI DEFERENSIAL
•
Keluaran kontroler diferensial
memiliki sifat seperti halnya suatu
operasi derivatif. Perubahan yang
mendadak pada masukan kontroler,
akan mengakibatkan perubahan
yang sangat besar dan cepat.
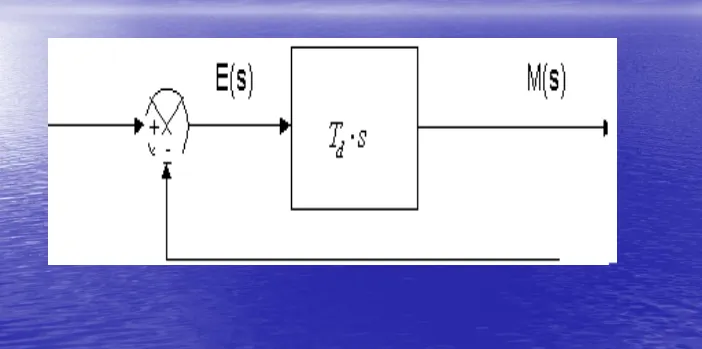
Gambar berikut ini menunjukkan blok
diagram yang menggambarkan
•
Gambar berikut ini menyatakan hubungan antara sinyal masukan dengan sinyal keluaran kontroler diferensial. Ketika masukannya tidak mengalami perubahan, keluaran kontroler juga tidakmengalami perubahan, sedangkan apabila sinyal masukan berubah mendadak dan menaik
(berbentuk fungsi step), keluaran menghasilkan sinyal berbentuk impuls. Jika sinyal masukan
berubah naik secara perlahan (fungsi ramp),
keluarannya justru merupakan fungsi step yang besar magnitudnya sangat dipengaruhi oleh
kecepatan naik dari fungsi ramp dan faktor
Karakteristik kontroler
diferensial adalah sebagai
berikut:
– Kontroler ini tidak dapat menghasilkan keluaran bila tidak ada perubahan pada masukannya (berupa sinyal kesalahan).
– Jika sinyal kesalahan berubah terhadap waktu, maka
keluaran yang dihasilkan kontroler tergantung pada nilai Td dan laju perubahan sinyal kesalahan. (Powel, 1994, 184).
– Kontroler diferensial mempunyai suatu karakter untuk mendahului, sehingga kontroler ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi kontroler diferensial dapat
mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan
•
Berdasarkan karakteristik kontroler
tersebut, kontroler diferensial umumnya
dipakai untuk mempercepat respon awal
suatu sistem, tetapi tidak memperkecil
kesalahan pada keadaan tunaknya. Kerja
kontrolller diferensial hanyalah efektif
pada lingkup yang sempit, yaitu pada
Kontroler PID
•
Setiap kekurangan dan kelebihan darimasing-masing kontroler P, I dan D dapat saling menutupi dengan menggabungkan ketiganya secara paralel menjadi kontroler proposional plus integral plus diferensial (kontroller PID). Elemen-elemen
kontroller P, I dan D masing-masing secara
keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan
Penalaan Paramater
Kontroler PID
• Penalaan parameter kontroller PID selalu didasari atas
tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum penalaan parameter PID itu dilakukan. Karena penyusunan model
matematik plant tidak mudah, maka dikembangkan suatu metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak diperlukan lagi, karena dengan menggunakan data yang berupa kurva krluaran, penalaan kontroler PID telah dapat dilakukan.
Penalaan bertujuan untuk mendapatkan kinerja sistem
Metode Ziegler-Nichols
•
Ziegler-Nichols pertama kali
memperkenalkan metodenya pada
tahun 1942. Metode ini memiliki dua
cara, metode osilasi dan kurva
reaksi. Kedua metode ditujukan
untuk menghasilkan respon sistem
dengan lonjakan maksimum sebesar
25%. Gambar berikut ini
Kurva respons tangga satuan yang
memperlihatkan 25 % lonjakan
Metode Kurva Reaksi
•
Metode ini didasarkan terhadap reaksi
sistem untaian terbuka. Plant sebagai
untaian terbuka dikenai sinyal fungsi
tangga satuan. Kalau plant minimal tidak
mengandung unsur integrator ataupun
pole-pole kompleks, reaksi sistem akan
berbentuk S. Gambar 13 menunjukkan
kurva berbentuk S tersebut. Kelemahan
metode ini terletak pada
ketidakmampuannya untuk plant
integrator maupun plant yang memiliki
pole kompleks.
Respon tangga satuan
sistem
•
Kurva berbentuk-s mempunyai dua konstanta,waktu mati (dead time) L dan waktu tunda T. Dari gambar kurva s terlihat bahwa kurva reaksi
berubah naik, setelah selang waktu L. Sedangkan waktu tunda menggambarkan perubahan kurva setelah mencapai 66% dari keadaan mantapnya. Pada kurva dibuat suatu garis yang
bersinggungan dengan garis kurva. Garis
singgung itu akan memotong dengan sumbu absis dan garis maksimum. Perpotongan garis
singgung dengan sumbu absis merupakan ukuran waktu mati, dan perpotongan dengan garis
•
Penalaan parameter PID didasarkan
perolehan kedua konstanta itu.
Zeigler dan Nichols melakukan
eksperimen dan menyarankan
parameter penyetelan nilai Kp, Ti,
dan Td dengan didasarkan pada
kedua parameter tersebut. Tabel 1
merupakan rumusan penalaan
Penalaan paramater PID
dengan metode kurva reaksi
Tipe
Kontroler Kp Ti Td
P T/L ~ 0
PI 0,9 T/L L/0.3 0
Metode Osilasi
•
Metode ini didasarkan pada reaksi sistem untaian tertutup. Plant disusun serial dengan kontroller PID. Semula parameter parameter integrator disetel tak berhingga dan parameter diferensial disetel nol (Ti = ~ ;Td = 0). Parameterproporsional kemudian dinaikkan bertahap. Mulai dari nol sampai mencapai harga yang
mengakibatkan reaksi sistem berosilasi. Reaksi sistem harus berosilasi dengan magnitud
Sistem untaian tertutup
dengan alat kontrol
•
Nilai penguatan proportional pada
saat sistem mencapai kondisi
sustain
oscillation
disebut
ultimate gain
Ku.
Periode dari
sustained oscillation
disebut
ultimate period
Tu
(Perdikaris, 1991, 433). Gambar
•
Penalaan parameter PID didasarkan terhadap kedua konstanta hasil eksperimen, Ku dan Pu. Ziegler dan Nichols menyarankan penyetelan nilai parameter Kp, Ti, dan Td berdasarkan rumus yang diperlihatkan pada Tabel berikutTipe Kontroler Kp Ti Td
P 0,5.Ku
PI 0,45.Ku 1/2 Pu
Metode
Quarter - decay
•
Karena tidak semua proses dapat mentolerirkeadaan osilasi dengan amplituda tetap, Cohen-coon berupaya memperbaiki metode osilasi
dengan menggunakan metode quarter amplitude decay. Tanggapan untaian tertutup sistem, pada metode ini, dibuat sehingga respon berbentuk
quarter amplitude decay (Guterus, 1994, 9-13).
Quarter amplitude decay didefinisikan sebagai respon transien yang amplitudanya dalam