PENGEMBANGAN METODOLOGI OPEN FREE RUNNING MODEL
TEST PADA PENGUJIAN PROTOTIPE KEMUDI BER-TAIL FLAP
*Rizky Hariseputra, **Aries Sulisetyono, ST., MASc., Ph.D.
*Mahasiswa Jurusan Teknik Perkapalan **Staff Pengajar Jurusan Teknik Perkapalan
Fakultas Teknologi Kelautan Institut Teknologi Sepuluh Nopember
SURABAYA
ABSTRAK
Dalam merancang sebuah kapal ada beberapa peraturan yang harus dipenuhi. Salah satunya adalah peraturan IMO (International Maritime Organization) ”Standard for Ship Maneuverability”, performa maneuverability kapal harus didesain sejak tahap perancangan agar memenuhi persyaratan yang ada. Untuk memprediksi gerak manuver kapal harus dilakukan pengujian free running model. Pengujian ini hanya bisa dilakukan oleh beberapa laboratorium hidrodinamika di Indonesia. Sehingga, diperlukan banyak biaya untuk dapat melakukan pengujian. Dalam penelitian ini metode pengujian free running model dikembangkan agar dapat dilakukan dengan biaya yang terjangkau dan efisien.
Metode yang dikembangkan ini kemudian digunakan untuk menguji performa tiga jenis kemudi, yaitu kemudi konvensional (biasa) selanjutnya disebut tipe A, kemudi konvensional (biasa) yang ditambahkan tail flap selanjutnya disebut tipe B, dan kemudi seri NACA 0018 yang dimodifikasi dengan tail flap dalam penelitian sebelumnya yang selanjutnya disebut tipe C. Metode yang digunakan disebut open free running model test karena dilakukan di kolam terbuka. Proses pengambilan data menggunakan kamera yang terdapat tepat di atas kolam sehingga dapat merekam semua gerakan manuver kapal dan menghasilkan data berupa video. Data yang ada diolah dengan melihat posisi kapal pada tiap frame. Pengolahan data ini disebut image processing.
Dari pengujian yang telah dilakukan diketahui bahwa performa kemudi tipe B mengalami peningkatan performa sebesar 13,04% (Portside) dan 14,5% (Starboard) dibanding kemudi tipe A. Sedangkan performa kemudi tipe C meningkat sebesar 8,23% (Portside) dan 7,18% (Starboard) dibanding kemudi tipe B atau apabila dibandingkan dengan kemudi tipe A, kemudi tipe C ini mengalami peningkatan perforrma sebesar 20,2% (Portside) dan 20,63% (Starboard).
Kata kunci: maneuverability, free running model test, image processing, tail flap.
1. PENDAHULUAN
Dalam merancang sebuah kapal perlu memperhatikan peraturan-peraturan yang ada, baik nasional maupun internasional. Salah satunya adalah peraturan IMO (International Maritime Organization) “Standards for Ship Maneuverability”, performa maneuverability kapal harus didesain sejak tahap perancangan agar memenuhi persyaratan yang ada. Oleh
karena itu, prediksi untuk mengetahui performa maneuverability harus dilakukan sejak awal tahap perancangan. Maneuverability kapal merupakan hal penting karena menentukan keselamatan kapal yang berlayar di laut, terutama di daerah pelayaran yang sempit seperti di pelabuhan. Kecelakaan akibat tabrakan kapal masih terjadi dan salah satu sebabnya adalah karena rendahnya kinerja sistem kemudi kapal, seperti kapal tidak mampu menghindar secara cepat terhadap kapal lainnya yang berjarak relatif dekat didepannya.
Saat ini telah ditemukan inovasi desain kemudi baru yang dapat meningkatkan performa maneuverability kapal, yaitu kemudi ber-tail flap. Secara perhitungan jenis kemudi ini sudah terbukti lebih baik dibanding jenis kemudi konvensional (biasa), namun hasil tersebut masih harus divalidasi dengan pengujian model pada kolam terbuka. Metode yang cocok untuk pengujian ini adalah pengujian free running model dimana gerakan model kapal dapat dikendalikan dari tepi kolam melalui sistem peralatan remote control dengan teknologi wireless.
Untuk mendapatkan data gerakan maneuver kapal ada beberapa pilihan metode yang dapat diterapkan pada penelitian ini, yaitu metode image processing, metode gelombang radio, dan metode gelombang satelit via GPS (Global Positioning System).
Beberapa instansi yang dapat melakukan free running model test menawarkan percobaan ini dengan harga yang cukup tinggi dan memakan waktu yang cukup lama. Oleh karena itu, penulis mengembangkan teknik free running model test yang lebih efisien dan praktis namun tetap memperhatikan dan memenuhi ketentuan ITTC tahun 2000 dan 2001 (23rd
Pengujian ini akan diaplikasikan untuk kasus membandingkan performa turning circle model kapal dengan tiga kemudi yang berbeda secara bergantian, yaitu kemudi konvensional (biasa), kemudi konvensional (biasa) yang ditambahkan dengan tail flap dan kemudi desain tail flap. Dari gerakan ini akan diketahui jarak advance, transfer, radius tactical diameter, dan turning diamter dari ketiga kemudi tersebut. Semakin kecil jaraknya semakin baik pula maneuverability model kapal.
ITTC Maneuvering Commission Report 2002).
2. TINJAUAN PUSTAKA
Free running model test merupakan salah satu jenis eksperimen yang sangat penting dalam bidang stabilitas dan dinamika gerak kapal. Menurut Lewis (1989) free running model test lebih praktis dengan memanfaatkan model kapal yang dilengkapi dengan propeler sendiri dengan skala tertentu. Sehingga dapat dilakukan gerakan manuver yang sebenarnya dan dapat ditentukan hal apa saja yang kurang.
Peralatan untuk melakukan free running model test yang digunakan oleh Umeda (1995) dan Hamamoto (1996) terdiri dari dua bagian besar, yaitu peralatan-peralatan yang terpasang di model kapal (on board equipments), dimana peralatan-peralatan ini ikut bergerak dengan model kapal, dan peralatan-peralatan yang tidak terpasang di kapal, yaitu peralatan-peralatan yang diletakkan di darat (ground facilities). Peralatan yang on board di model kapal antara lain terdiri dari peralatan untuk mengendalikan kemudi model kapal yang digerakkan dengan stepping motor, peralatan untuk merekam data posisi dari model kapal tersebut, dan juga motor untuk menggerakkan main propeller.
Free running model test memerlukan model dengan putaran propeller dan posisi control-surface yang dikontrol dan dicatat sebagai fungsi waktu. Free running model ini juga memerlukan kolam percobaan manouver yang cukup luas, untuk mendapatkan data koordinat sumbu X0 dan sumbu Y0
Dengan memakai model dalam skala tertentu yang diletakkan dalam kolam air, dalam beberapa saat dapat diketahui tinggi sarat haluan dan sarat buritan serta kemiringan yang terjadi dapat diukur. Standard pengujian dengan teknik free running model test mengacu pada ketentuan internasional yang telah disepakati bersama untuk memastikan kualitas serta ketersediaan hasil pengujian. Standart pengujian yang digunakan mengacu pada organisasi ITTC tahun 2000 dan 2001 (23
, keduanya sebagai fungsi dari waktu. Dengan menggunakan instruksi-instruksi diatas untuk kapal skala penuh, gerakan maneuver turning circle dapat dilakukan dengan dengan free running model dan hasil karakteristik dari manouver ini bisa digunakan. Untuk alasan inilah teknik free running model test masih tetap digunakan untuk memperkirakan karakteristik gerak manouver model kapal.
rd
Perlu diingat bahwa pengaruh skala pada manouver kapal belum diketahui secara pasti, semakin besar model kapal yang digunakan semakin kecil error yang timbul akibat penskalaan. Dan juga ukuran sesungguhnya dari kolam test dalam hubungannya dengan luas area test harus diperhatikan sehingga mampu untuk melakukan test peralatan pendukung lainnya. Dalam pemakaian model fisik untuk melakukan pengujian, hasil yang diperoleh harus dapat ditransfer dari skala model ke skala penuh.
ITTC Manouvering Committee Report, 2002).
2.1.Faktor Skala
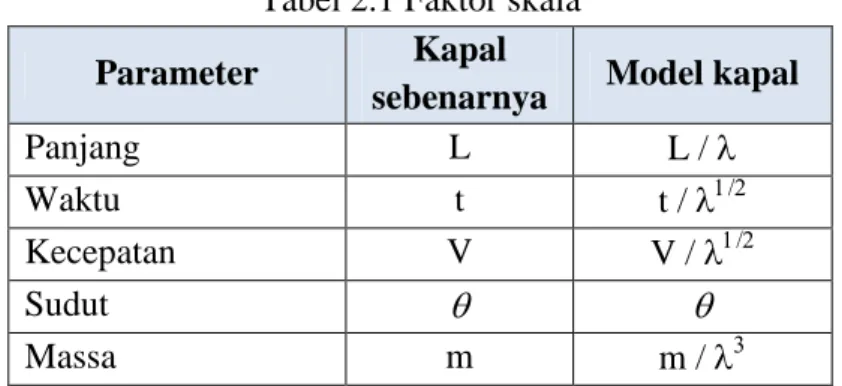
Untuk dapat memprediksi gerakan kapal dari pengujian model, maka antara model kapal yang digunakan dengan kapal sebenarnya haruslah memiliki kesamaan geometris yang sama. Perbandingan dimensi antara model kapal dengan kapal sebenarnya harus linea, perbandingan ini disebut faktor skala, λ. Contohnya seperti:
λ
Kesamaan dinamis juga harus diperhatikan seperti kecepatan, waktu, dan massa. Seperti tabel 2.1 di bawah ini:
Tabel 2.1 Faktor skala
Parameter Kapal
sebenarnya Model kapal
Panjang L L / λ Waktu t t / λ1/2 Kecepatan V V / λ1/2 Sudut θ θ Massa m m / λ3 2.2.Manoeuver Turning
Turning test dilakukan untuk mengetahui kemampuan turning sebuah kapal. Pengujian ini dilakukan dengan belok ke arah starboard sebesar 35° dan begitu pula
sebaliknya ke arah portside. Respon yang diterima kapal karena defleksi dan gaya serta momen yang dihasilkan kemudi dibagi menjadi dua bagian:
• Transien awal dimana terjadi percepatan surge, sway dan yaw.
• Bagian belok tetap (steady turning) dimana kecepatan belok dan kecepatan maju adalah tetap dan lintasan kapal adalah bulat (circular).
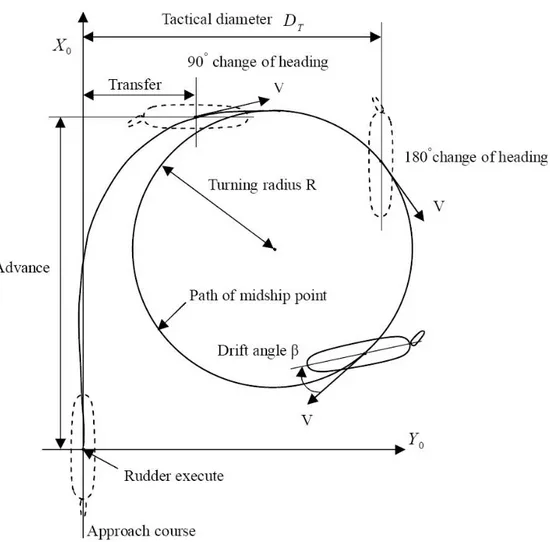
Umumnya lintasan belok kapal diklasifikasikan dalam 4 pengukuran numerik:
• Advance:
Jarak dari titik origin pelaksanaan, terhadap sumbu x kapal, bila sumbu telah berbelok 90°. Jarak maksimum advance yang diijinkan untuk gerak turning adalah tidak lebih atau sama dengan 4,5 LPP
• Transfer:
.
Jarak dari origin approach course terhadap origin kapal bila sumbu x telah berbelok 90°.
• Tactical Diameter:
Jarak dari approach course terhadap sumbu x kapal saat sumbu tersebut telah belok 180°. Tactical diameter maksimum yang diijinkan adalah tidak lebih atau sama dengan 5 Lpp.
• Steady Turning diameter.
Parameter lintasan belok kapal berguna untuk memberikan ciri maneuver di laut terbuka. juga menunjukkan posisi dari pivot point pada belok (steady turn). Titik ini menarik karena dari pengamatan saat kapal berbelok ini terlihat seperti bila kapal berputar terhadap sebuah titik, biasanya dibelakang badan kapal. Pada titik ini, karena kombinasi drift angle pada kapal dan rotasi kapal, aliran air yang melintasi kapal sejajar dengan sumbu x kapal.
Gerak manouver turning telah menjadi perhatian yang paling banyak dalam hal gerak manouver kapal. Salah satu alasannya adalah bahwa gerak turning merupakan gerak yang praktis dan penting dalam gerak manouver. Dan juga karena phase akhir dari gerak turning ini adalah steady-state manouver.
3. METODE PENELITIAN
3.1.Prosedur Pengambilan Data
Berikut ini adalah prosedur pengujian untuk mengambil data mulai dari peletakan peralatan di sekitar kolam hinggapengujian berlangsung :
• Menentukan kolam terbuka yang dapat digunakan untuk pengujian free running. Dalam pengujian ini kolam yang dipilih adalah kolam renang umum. Posisi kolam renang yang tepat berada di sebelah rumah pemiliknya memudahkan untuk mengatur letak web cam dari lantai 2.
• Mengatur posisi web cam agar berada tepat di atas kolam dengan cara meletakkan web cam pada papan triplek berukuran 20 x 20 cm yang kemudian di keempat ujungnya diikat tali yang nantinya akan dihubungkan dengan dinding-dinding yang ada di sekitar kolam.
• Setelah web cam sudah berada pada posisinya maka langkah selanjutnya mengatur koneksi web cam dengan laptop yang berada di pinggir kolam untuk monitoring dan meng-capture video.
• Kemudian 4 bola plastik yang diberi lampu led agar dapat dilihat jelas ketika lampu dipadamkan diatur posisinya di kolam sedemikian rupa agar dapat terekam oleh kamera. Bola plastik tersebut diatur menjadi bentuk persegi dan jaraknya dapat diukur dengan meteran. Nantinya persegi semu yang dibentuk oleh keempat bola plastik ini dijadikan patokan atau untuk mengkalibrasi gerakan model kapal.
• Sebelum pengujian di mulai, semua lampu yang berada di sekitar kolam dimatikan agar warna yang direkam oleh kamera adalah warna dari model kapal dan lampu led yang menjadi patokan untuk kalibrasi saja.
• Model kapal dijalankan dan direkam gerakan manuvernya.
3.2.Metode Pengolahan Data
• Setelah pengujian free running dilakukan, maka hasil yang didapat adalah gerakan turning circle berupa file video dengan format AVI. Video ini perlu dianalisa agar diameter dari gerakan turning circlenya dapat diketahui.
• Buka software windows movie maker. Kemudian import file video yang akan dianalisa.
• Capture tiap frame yang ada pada video dengan jarak waktu setiap 1 detik.
• Frame yang telah di capture dari video kemudian di skalakan dengan jarak aslinya. Software yang digunakan adalah autocad, software ini dapat mengimport file gambar (.jpeg) kemudian di skala dan di ambil datanya.
3.3.Jenis kemudi
Teknik pengujian diaplikasikan dengan menguji prototipe kemudi ber-tail flap dengan jenis sebagai berikut:
• Kemudi konvensional tanpa tail flap (Tipe A)
• Kemudi konvensional yang ditambahkan dengan tail flap (Tipe B) • Kemudi seri NACA 0018 yang ditambahkan dengan tail flap (Tipe C)
4. PENGUJIAN OPEN FREE RUNNING MODEL
Berikut adalah hasil pengujian free running model dengan skala model λ sebesar 85 untuk beberapa jenis kemudi. Metode pengujian yang digunakan telah dijelaskan pada bab sebelumnya.
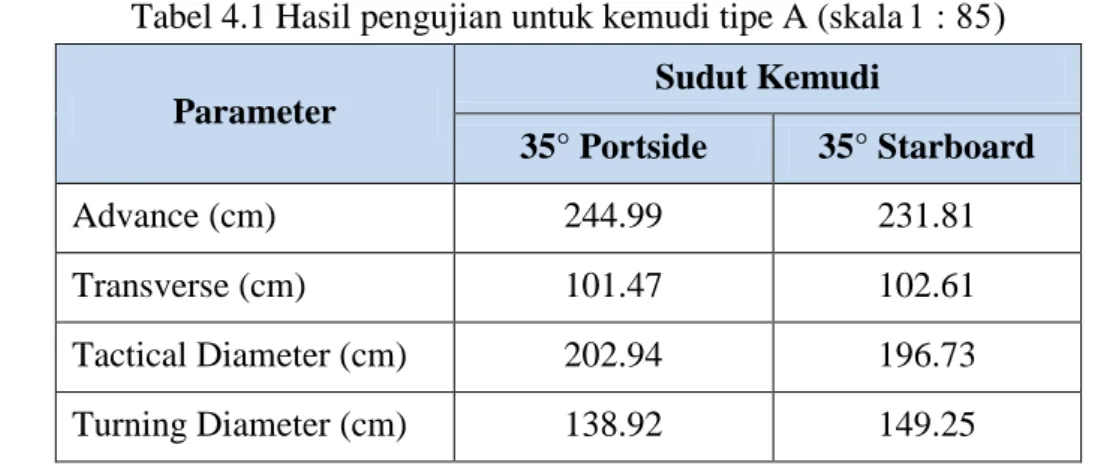
• Kemudi Tipe A
Tabel 4.1 Hasil pengujian untuk kemudi tipe A (skala 1 : 85)
Parameter Sudut Kemudi 35° Portside 35° Starboard Advance (cm) 244.99 231.81 Transverse (cm) 101.47 102.61 Tactical Diameter (cm) 202.94 196.73 Turning Diameter (cm) 138.92 149.25 • Kemudi Tipe B
Tabel 4.2 Hasil pengujian untuk kemudi tipe B ( sudut tail flap 10°) (skala 1 : 85)
Parameter Sudut Kemudi 35° Portside 35° Starboard Advance (cm) 213.05 198.21 Transverse (cm) 88.24 87.73 Tactical Diameter (cm) 176.48 168.22 Turning Diameter (cm) 120.81 127.62
• Kemudi Tipe C
Tabel 4.3 Hasil pengujian untuk kemudi tipe C ( sudut tail flap 10°) (skala 1 : 85)
Parameter Sudut Kemudi 35° Portside 35° Starboard Advance (cm) 195.50 183.98 Transverse (cm) 80.97 81.44 Tactical Diameter (cm) 161.95 156.14 Turning Diameter (cm) 110.86 118.46
5. ANALISA HASIL PENGUJIAN
Dari keterangan di atas dapat dilihat adanya perbedaan antara gerakan turning circle ke arah portside dan starboard. Hal ini disebabkan oleh arah putaran baling-baling ke kanan sehingga efek aliran yang melalui kemudi ketika belok ke arah portside dan starboard menjadi berbeda.
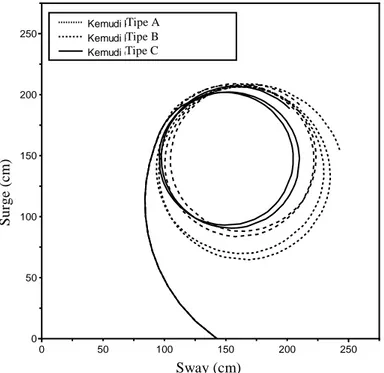
Perbedaan jenis kemudi juga menghasilkan turning diameter yang berbeda. Kemudi tipe B menghasilkan turning diameter yang lebih kecil dibandingkan dengan kemudi tipe A. Terjadi peningkatan sebesar 13,04 % (Portside) dan 14,5 % (Starboard). Desain kemudi tipe C juga menghasilkan turning diameter yang lebih baik dibandingkan kemudi tipe A. Peningkatan yang terjadi sebesar 20,2 % (Portside) dan 20,63 % (Starboard). Sedangkan jika dibandingkan dengan kemudi tipe B terjadi peningkatan sebesar 8,23 % (Portside) dan 7,18 % (Starboard). 0 50 100 150 200 250 0 50 100 150 200 250
Kemudi konvensional (biasa) Kemudi konvensional+ tail flap Kemudi desain tail flap
SW AY ( c m ) SURGE (cm)
Gambar 5.1 Grafik turning circle (35° starboard) untuk semua jenis kemudi Tipe A Tipe B Tipe C S u rg e ( cm ) Sway (cm)
6. KESIMPULAN DAN SARAN
6.1.Kesimpulan
• Prosedur pengujian yang dilakukan pada penelitian tugas akhir ini sudah memenuhi persyaratan untuk melakukan pengujian free running test di kolam terbuka.
• Jenis kemudi tipe B menghasilkan turning diameter yang lebih kecil dibandingkan dengan jenis kemudi tipe A. Peningkatan performa manuver yang terjadi sebesar 13,04 % (Portside) dan 14,5 % (Starboard).
• Desain kemudi tipe C terbukti memiliki performa manuver yang lebih baik daripada jenis kemudi tipe A. Turning diameter yang dihasilkan mengecil sampai 20,2 % (Portside) dan 20,63 % (Starboard).
6.2.Saran
• Untuk penelitian manuver selanjutnya agar menggunakan motor penggerak utama yang dapat dikendalikan kecepatannya sehingga nantinya hasil pengujian yang didapat bisa bervariasi dalam beberapa kecepatan.
• Model kapal yang digunakan harus diperhatikan kebersihannya agar tidak merusak lingkungan kolam tempat model tersebut diuji. Terutama bagian poros baling-baling yang biasanya memakai bahan yang berminyak untuk sistem kekedapannya.
• Gunakanlah GPS yang tingkat akurasinya tinggi sehingga dapat mendeteksi gerakan kurang dari 1 meter apabila ingin menggunakan GPS sebagai alat pengambilan datanya.
• Jika ingin menggunakan kamera sebagai alat pengambilan data gunakanlah kamera yang sudut jangkauannya besar sehingga area yang dapat direkam bisa lebih luas tanpa merubah jarak kamera secara signifikan.
• Perhatikan kondisi lingkungan kolam tempat pengujian secara cermat agar variabel-variabel yang berhubungan dengan kolam dapat mencapai nilai yang maksimal seperti faktor skala yang digunakan.
7. DAFTAR PUSTAKA
Abkowitz, M.A. (1998). “Stability and Control of Ocean Vehicle”. MIT Press, Cambridge, Mass.
Barnaby, Kenneth C. (1969). “Basic Naval Architechture”. Hutchinson Scientific and Technical, London.
Bhattacharyya, Rameswar. (1978). “Dynamics of Marine Vehicles”. John wiley & Sons, New York.
Edwards V. Lewis, Editor. (1989). “Principles of Naval Architecture Second Revision.
Volume III, Motions in Waves and Controllability”. The Society of Naval
Architecture and Marine Engineers, Jersey City.
Journee, J.M.J, dan Pinkster, jacob. (2002). “Introduction in Ship Hydromechanics”. Delft University of Technology.
Zaojian, Zou. (2006). “Ship Manoeuvering and Seakeeping”. Jiao Tong University, Shanghai.