5
BAB II
DASAR TEORI
Pada bab ini akan dibahas beberapa dasar teori yang menjadi dasar dan acuan untuk membuat dan merealisasikan sistem. Teori tersebut terdiri dari kajian pustaka, aturan dasar pertandingan, landasan teori yang membahas mengenai mikrokontroler ATmega324A, infrared proximity sensor, ultrasonik sensor SRF04, sensor garis dan konsep dasar sistem.
2. KAJIAN PUSTAKA DAN LANDASAN TEORI
Berikut adalah beberapa kajian pustaka dan landasan teori yang dapat mendukung pembuatan skripsi.
2.1. Tinjauan Pustaka
a. Ultrasonic and Infrared Sensors Performance in a Wireless Obstacle Detection System [5](Baharuddin Mustapha, Aladin Zayegh, Rezaul K. Begg 2013)
Pada jurnal ini, penulis berusaha untuk membuat prototipe alat yang dapat mendeteksi obstacle / penghalang menggunakan sensor ultrasonik dan sensor infrared. Alat ini dibuat bagi orang yang sudah tua dan bagi yang memiliki kesulitan dalam melihat sehingga memudahkan mereka untuk mengetahui bila di depannya ada penghalang. Hasilnya, sudah mampu mendeteksi benda dengan warna yang berbeda-beda maupun material yang berbeda-beda dengan tingkat akurasi mencapai 95 persen sesuai dengan tabel 2.1.
Tabel 2.1. Pengelompokkan Tinjaun Pustaka
Judul dan event Penulis Tujuan dan Metode Hasil Ultrasonic and Infrared Sensors Performance in a Wireless Obstacle Detection System 1. Baharuddin Mustapha 2. Aladin Zayegh 3. Rezaul K. Begg Mendeteksi jarak obstacle / penghalang tanpa menyentuh penghalang tersebut menggunakan sensor ultrasonik dan sensor infrared.
Berhasil mendeteksi penghalang
dengan warna dan material yang berbeda-beda dengan akurasi 95 %.
b. Obstacle Detection and Avoidance Autonomous Car [6](K. Vasavi M. V. S. Praveen 2014)
6
Jurnal ini berisi mengenai pendeteksian obstacle yang diterapkan pada mobil untuk meningkatkan keamanan dalam berkendara. Penerapan sistem deteksi ini baru diterapkan pada prototipe mobil otomatis yang mendapat sumber energi dari baterai dan panel surya. Pendeteksian obstacle menggunakan IR sensor dan data diolah dengan mikrokontroller 8051, kemudian outputnya berupa relay untuk mengendalikan motor. Obstacle sudah dapat dideteksi dengan baik dengan menggunakan IR sensor. Untuk pengembangan ke depannya dapat untuk mengetahui jarak dengan menggunakan senso r ultrasonik dan untuk mengenali bentuk object dengan menggunakan image processing.
c. Desain Pe rangkat Lunak Pengukuran Jarak antara Bidang Kame ra dan Objek Target Menggunakan Metode Triangulasi Computer Stereo Vision[7](Andri Bangun Raharjo 2014)
Pada Jurnal ini, dibuat sebuah perangkat lunak untuk mengukur jarak kamera dan objek sebenarnya dengan metode triangulasi komputer stereo vision. Komputer stereo vision adalah metode mengekstraksi informasi data dari gambar digital yang didapat dari kamera dengan membandingkan objek dari sudut pandang yang berbeda maka dapat diperoleh informasi 3d dari objek. Dengan menggunakan stereo vision maka sensor-sensor lain pada robot dapat dikurangi dengan tidak mengurangi fungsi dari robot. Pengambilan citra objek target dari sebuah kubus hitam dengan layar putih menggunakan webcam dengan posisi membentuk segitiga. Hasilnya didapat bahwa kamera dapat mendeteksi layaknya mata manusia dimana bila terlalu dekat atau jauh gambar akan blur, disini didapat gambar paling optimal bila benda berada sejauh 36 cm dari kamera.
2.2. Landasan Teori
2.2.1. Metode Triangulasi dan Scanning
Dalam trigonometri dan geometri dasar, triangulasi adalah proses mencari koordinat dan jarak sebuah titik dengan cara menghitung panjang sisi segitiga yang berhadapan dengan titik yang dicari tersebut dengan bantuan dua buah titik referensi, dan mengukur kedua sudut antara garis pada titik referensi dan garis panjang sisi segitiga yang menuju titik yang dicari. Prinsip triangulasi pada sensor ditunjukkan pada gambar 2.1. berikut.
7
Gambar 2.1. Prinsip Triangulasi [8]
La = Jarak lensa sensor ke objek boneka A. Lb= Jarak lensa sensor ke objek boneka B. A = Jarak antara transmitter dan receiver. f = Jarak lensa ke receiver.
X = Jarak titik lensa ke pantulan di Position Sensing Detector (PSD)
Dengan menerapkan prinsip bahwa segitiga sebangun memiliki perbandingan sisi yang sama maka didapat : ………..……….…(2.1)
Sehingga didapat rumus 2.2 dari persamaan rumus 2.1 sebagai berikut :
X =
…….………..…….………..….(2.2) A La Lb f X
8
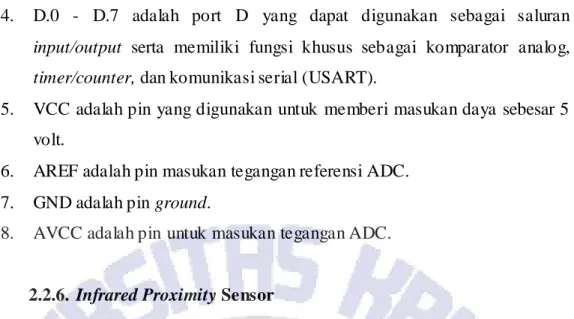
Gambar 2.2. Penerapan Triangulasi pada Robot
Gambar 2.2 menunjukkan penerapan metode triangulasi pada robot. Prinsip peletakkan sensor secara triangulasi dapat ditentukan dengan menghitung koordinat dan jarak yang diinginkan dari robot ke boneka agar robot tidak menabrak boneka. Dari sudut deteksi maksimal sensor infrared proximity kiri didapat sudut α , dan sensor infrared proximity kananmendapatkan sudut β.
Gambar 2.3. Hukum Sinus
Dengan hukum sinus seperti pada gambar 2.3. , maka pada gambar 2.2. dapat ditentukan jarak antar sensor, dimana bila sudut titik yang dicari adalah γ, maka sisi L (jarak antara sensor) dapat dicari dengan rumus 2.3 berikut:
………. (2.3)
………. (2.4)
=………. (2.5)
L = ………. (2.6)Dengan mensubstitusikan rumus 2.4 ke rumus 2.3, didapat rumus 2.5 yang dapat diubah menjadi rumus 2.6, untuk mencari nilai L digunakan rumus 2.6.
γ
9 d = jarak robot ke boneka.
L = jarak antar dua buah sensor infrared proximity.
γ = sudut yang terbentuk dari sinar pantul dan sinar datang. = sudut antara sensor dengan sisi robot.
Metode Scanning adalah metode mendeteksi suatu objek dengan mengambil data terus menerus dari berbagai sudut yang berbeda. Metode ini dapat diterapkan sbb :
Untuk pengukuran jarak
Mapping: dengan melakukan scan dengan sensor ultrasonik secara memutar. (untuk memetakan objek disekitar robot)
Gambar 2.4. Scanning Sensor Ultrasonik SRF04 dan Grafik Hasil Scanning [9]
Didapat hasil bahwa bila kursi yang ada di dekat robot terdeteksi maka kembalian nilai SRF04 kecil dan ketika SRF04 depan menghadap ke pintu maka nilai kembaliannya besar sesuai dengan grafik pada gambar 2.4.
2.2.2. Aturan Pertandingan
KRPAI 2016 dilaksanakan berdasarkan aturan yang diadopsi dari Trinity College Fire Fighting Home Robot Contest (TCFFRC) dimana aturan tersebut berbeda dengan aturan pada tahun 2015 kemarin yang menggunakan sistem battle. Berikut adalah aturan yang terdapat pada peraturan TCFFCR [1] :
1. Model perlombaan menggunakan sistem time trial dimana robot yang tercepat memadamkan api yang akan menang, selain itu ada pula nilai bonus yang bisa diambil.
chair
Robot
chair Doorway
Scan moving from left to right
Le ngt h of E c ho
10
2. Menggunakan sebuah lapangan yang terdiri dari 4 buah room seperti terlihat di Gambar 3.5.
3. Bonus-bonus yang dapat diambil untuk memperkecil nilai waktu adalah : a. Dua buah mode start dengan score yang berbeda yaitu non arbitrary start
atau arbitrary start (opsional / score *0.6).
b. Selain itu ada bonus lain seperti room factor, dengan aturan :
-terdapat api pada room pertama yang dikunjungi (score*1) -terdapat api pada room kedua yang dikunjungi (score*0.85) -terdapat api pada room ketiga yang dikunjungi (score*0.5) -terdapat api pada room keempat yang dikunjungi (score*0.35) Sedangkan bila mengambil arbitrary start maka room start dianggap room pertama dan room factor diitung bila robot sudah masuk lebih dari setengah badan robot.
c. Non-air extinguisher adalah bonus score*0.75 yang akan didapat bila memadamkan lilin selain menggunakan angin.
d. Furniture bersifat opsional dan bila diambil akan memperoleh bonus score*0.75.
e. Return Trip dinyatakan berhasil dan memperoleh bonus score*0.8 apabila robot dapat kembali ke tempat asal, dengan syarat bila mengecek room yang bukan homenya maka robot tidak boleh masuk lebih dari setengah bagian badan robot.
4. Lapangan terbuat dari papan multipleks dengan tebal 2 cm. Bentuk dan ukuran lapangan pertandingan dapat dilihat pada gambar 2.5.
11 2.2.3. Dog Obstacle
Aturan pertandingan mengadopsi dari aturan Trinity College Fire Fighting Home Robot Contest. Obstacle yang digunakan berupa boneka anjing atau kucing yang akan menghalangi 50 – 70% lebar lorong sesuai dengan aturan dari Trinity College Fire Fighting Home Robot Contest. Disini obstacle wajib ada bukan merupakan bonus yang bisa diambil atau tidak. Jika menyentuh boneka tidak ada penalti, tetapi menggeser boneka lebih dari 1 cm akan mendapat penalti. Jika melewati boneka maka akan didiskualifikasi. Berat boneka 500 gr. Hanya terdapat 1 boneka pada tiap kali trial dengan kandidat letak boneka yang dapat dilihat pada gambar 2.6 [2].
Gambar 2.6. Bentuk dan Kandidat Letak Boneka
2.2.4. Furniture
Furniture merupakan sebuah pilihan atau opsional, namun bila diambil akan mendapat bonus pengkali sebesar 0.75. Furniture bertujuan untuk mensimulasikan benda-benda yang berada di suatu ruangan dan untuk menguji kemampuan maneuver robot di dalam suatu ruangan dalam rangka bergerak mendekati api. Furniture berbentuk silinder berwarna kuning terang (R:255 , G:255 , B:0) terbuat dari potongan pipa PVC/paralon berdiameter 11 cm dengan tinggi 30 cm. Silinder paralon ini kemudian dicor dengan adukan semen dan pasir supaya menjadi berat dan agar tidak mudah tergeser/jatuh jika tertabrak robot. Gambar 2.7 menunjukkan bentuk dan warna dari furniture yang digunakan. [2]
12
Gambar 2.7. Bentuk, Ukuran dan Warna Furniture
Di bagian bawah furniture akan diberi alas yang berfungsi mendeteksi pergeseran furniture saat tertabrak robot dimana bila furniture bergeser lebih dari 5 cm maka akan dikenakan pinalti. Alas ini berbentuk lingkaran berdiameter 21 cm terbuat dari plat alumunium (tebal 1.5 – 2 cm) yang bagian atasnya dilapisi karbon berwarna hitam dop (R:0 , G:0 , B:0) dan bagian bawahnya dilapisi alas karet anti slip. Alas furniture berjumlah 4 buah sesuai dengan gambar 2.8 berikut [2].
Gambar 2.8. Bentuk, Ukuran dan Warna Alas Furniture
2.2.5. Mikrokontroler ATmega324A
Mikrokontroler adalah sebuah chip kecil yang memiliki fungsi spesifik dibandingkan dengan personal computer (PC). Chip tersebut terdiri dari Central Processing Unit (CPU), Random Access Memory (RAM), Read Only Memory (ROM), I/O Port, Serial I/O, timer dan clock circuit.
30 cm
11 cm
(R:255, G:255, B:0)
Tampak atas
Tampak samping
Kertas karton hitam (0,5 mm) Plat aluminium (1,5-2 mm) Alas karet anti slip (1 mm) 4 mm (maks)
13
Pada tugas akhir digunakan mikrokontroler ini dikarenakan spesifikasi yang dimiliki cukup untuk dapat memproses sensor maupun mengolah algoritma dari robot. Spesifikasi yang dimiliki oleh ATmega324A adalah sebagai berikut [10]:
1. Memori flash sebesar 32 KB. 2. 1 KB EEPROM.
3. 2 KB SRAM.
4. Tiga buah timer/counter. 5. Delapan saluran 10-bit ADC. 6. Serial USART.
7. Interupsi internal/external.
8. 32 saluran input/output (PORTA, PORTB, PORTC, PORTD).
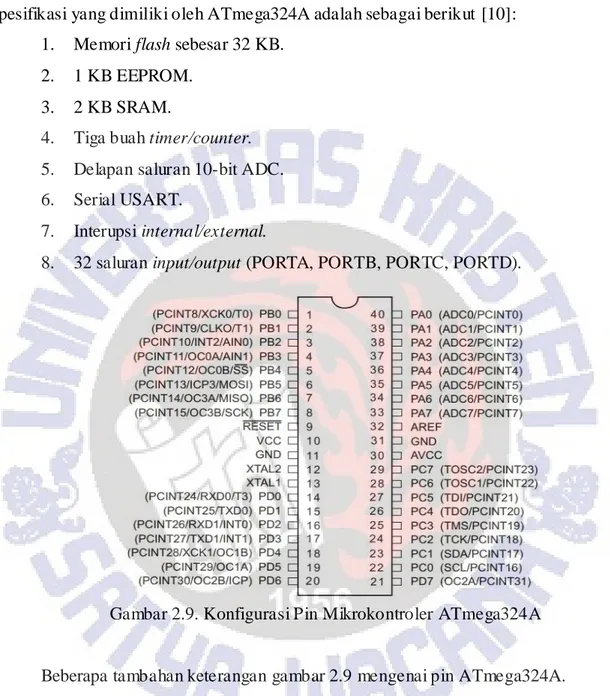
Gambar 2.9. Konfigurasi Pin Mikrokontroler ATmega324A
Beberapa tambahan keterangan gambar 2.9 mengenai pin ATmega324A. 1. A.0-A.7 adalah port A yang dapat digunakan sebagai saluran input/output
serta memiliki fungsi khusus sebagai port Analog to Digital Converter (ADC).
2. B.0-B.7 adalah port B yang dapat digunakan sebagai saluran input/output serta memiliki fungsi khusus seperti SPI, chip clock oscilator dan timer/counter.
3. C.0-C.7 adalah port C yang dapat digunakan sebagai saluran input/output serta memiliki fungsi khusus sebagai komunikasi protokol I2C.
14
4. D.0 - D.7 adalah port D yang dapat digunakan sebagai saluran input/output serta memiliki fungsi khusus sebagai komparator analog, timer/counter, dan komunikasi serial (USART).
5. VCC adalah pin yang digunakan untuk memberi masukan daya sebesar 5 volt.
6. AREF adalah pin masukan tegangan referensi ADC. 7. GND adalah pin ground.
8. AVCC adalah pin untuk masukan tegangan ADC.
2.2.6. Infrared Proximity Sensor
Infrared Proximity Sensor adalah sensor yang dapat merasakan keberadaan suatu benda tanpa menyentuh benda tersebut yaitu dengan menggunakan infrared. Sensor ini hanya dapat mendeteksi apakah ada benda yang menghalangi atau tidak ada, sensor tidak dapat mengetahui jarak ke benda tersebut. Transmiter dan receiver yang ada di dalam sensor tersebut menghadap kearah yang sama, dimana receiver akan menerima pantulan sinar infrared dari transmitter. Gambar 2.10 menunjukkan bentuk sensor infrared proximity yang digunakan.
Spesifikasi Infrared Proximity Sensor sebagai berikut [11]: Jarak deteksi 3cm – 80cm.
Sudut Deteksi : 150 atau kurang Tegangan 5 volt DC.
Waktu Respon < 2 ms Arus beban maks 100mA.
Diameter : 18mm, panjang : 45mm. Bekerja pada temperature : -25 -70 oC Merah +5v, Kuning Sinyal, Hitam GND
15
2.2.7. Distance Ultrasonic Sensor (SRF04)
SRF04 adalah sensor yang dapat mengukur jarak benda atau objek yang ada di depannya. Sensor ini bekerja dengan sinyal ultrasonik (40KHz) dengan mengirimkan pulsa selama 10 mikrodetik. Sinyal akan dipantulkan ke objek yang ada di depan sensor tersebut dan akan diterima oleh modul yang sama. Waktu yang ditempuh untuk proses pemancaran sinyal disebut echo. Echo berbentuk sinyal high pada keluaran modul sensor, lamanya sinyal echo ini akan menunjukkan jarak benda terhadap sensor. Lebar pulsa echo antara 100 mikrodetik – 18 milidetik dan sebanding dengan jarak 3 sentimeter – 3 meter.
Sensor jarak SRF04 digunakan sebagai sensor untuk mengetahui dimana letak boneka. Sensor ini dipilih karena mempunyai spesifikasi yang sesuai dengan kebutuhan tugas akhir ini. Gambar 2.11 menunjukkan bentuk sensor yang digunakan. Spesifikasi yang dimiliki SRF04 diantaranya [12]:
1. Bekerja pada level tegangan 5 volt.
2. Arus yang dibutuhkan 30 - 50 miliampere. 3. Mengukur jarak antara 3 sentimeter – 3 meter. 4. Keluaran berupa tegangan TTL.
5. Dimensi 43 mm x 20 mm x 17 mm.
Gambar 2.11. Distance Ultrasonic Sensor (SRF04) Data – data dari sensor SRF04 ini adalah sebagai berikut:
Tabel 2.2. Data-Data Sensor SRF04 dalam cm.
Jarak Benda (c m) Data Sensor Data Sensor (c m) Perbedaan (c m) Jarak Benda (c m) Data Sensor Data Sensor (c m) Perbedaan (c m) 3 47 3,2 0,2 32 482 32,8 0,8 4 62 4,2 0,2 33 495 33,6 0,6 5 73 4,9 0,1 34 510 34,7 0,7 6 92 6,2 0,2 35 523 35,6 0,6
16 7 107 7,3 0,3 36 540 36,7 0,7 8 120 8,2 0,2 37 550 37,4 0,4 9 132 9 0 38 561 38,2 0,2 10 153 10,4 0,4 39 580 39,4 0,4 11 165 11,2 0,2 40 591 40,2 0,2 12 181 12,3 0,3 41 616 41,2 0,2 13 198 13,4 0,4 42 625 42,5 0,5 14 212 14,4 0,4 43 640 43,5 0,5 15 219 14,8 0,2 44 660 44.9 0,9 16 235 16 0 45 673 45,8 0,8 17 250 17 0 46 690 46,9 0,9 18 268 18,2 0,2 47 704 47,9 0,9 19 283 19,2 0,2 48 719 48,9 0,9 20 296 20,1 0,1 49 730 49,6 0,6 21 317 21,6 0,6 50 749 50.9 0.9 22 330 22,4 0,4 60 895 60,9 0,9 23 345 23,5 0,5 70 1040 70.7 0,7 24 359 24,4 0,4 80 1186 80.6 0,6 25 370 25,2 0,2 90 1345 90,3 0,3 26 387 26,3 0,3 100 1485 100.9 0,9 27 400 27,2 0,2 110 1640 111.5 1.5 28 420 28,6 0,6 120 1805 122.7 2.7 29 435 29,6 0,6 130 1956 133.2 3.2 30 444 30,2 0,2 140 2106 143.2 3.2 31 462 31,4 0,4 150 2255 153,3 3,3
Data sensor dalam cm tersebut didapat rumus perhitungan sebagai berikut :
17
2. Contoh perhitungan pada jarak 30 cm.
3. Contoh perhitungan pada jarak 100 cm.
Perbedaan ralat yang cukup jauh dikarenakan adanya ralat penggaris dan ralat mata dari pengukur. Selain itu juga dikarenakan adanya pembulatan saat perhitungan serta nilai dari SRF04 disimpan pada tipe data integer sehingga angka dibelakang koma tidak ditampilkan sehingga semakin jauh jarak yang diukur ralat juga semakin besar, hal ini terlihat pada table untuk jarak > 1 meter maka ralat perbedaan semakin besar pula. Namun karena ralat untuk jarak dibawah 1 meter masih dibawah 1 cmdan untuk jarak > 1 meter ralat beberapa cm tersebut tidak akan terlalu membuat perbedaan maka sensor ini sudah cukup baik untuk melakukan wall following.
2.2.8. Sensor Garis
Sensor garis menggunakan photodioda dan LED serta rangkaian resistor seperti pada gambar 2.12. Fungsi dari sensor ini adalah mendeteksi garis putih yang diibaratkan seperti pintu pada room yang berbeda dengan lantai ruang ataupun lorong yang berwarna hitam atau abu-abu.
Gambar 2.12. Rangkaian Sensor Garis.
Pada rangkaian diatas, apabila LED memancarkan cahaya ke permukaan bidang berwarna hitam maka intensitas cahaya yang akan diterima photodioda kecil
18
dikarenakan warna hitam bersifat menyerap cahaya. Hal ini menyebabkan resistansi pada photodioda akan menjadi besar (diasumsikan tak terhingga) dan mengakibatkan tidak ada arus yang masuk ke output. Sedangkan sebaliknya, bila cahaya memantul pada bidang putih maka intensitas cahaya yang diterima photodioda besar sehingga menyebabkan resistansi pada photodioda akan menjadi kecil dan mengakibatkan ada arus yang masuk ke output. Sehingga, akan ada tegangan pada output yang bermacam- macam tergantung pada warna permukaan bidang yang dipantulkan oleh LED dan diterima photodioda[8].
Tegangan-tegangan output yang bermacam- macam ini akan diolah datanya dengan Atmega324. Dengan memanfaatkan fasilitas ADC 10-bit pada Atmega324, tegangan output yang analog akan dikonversikan ke digital. Sehingga, nilai- nilai tiap mengenai permukaan tertentu akan terbaca.
Pada robot digunakan 7 buah sensor garis yang diletakkan sepanjang tubuh robot, dan berada pada bagian bawah robot. Penggunaan tujuh buah sensor garis supaya robot mudah membedakan antara garis putih pintu ruangan atau juring Home. Untuk sensor depan kiri (persegi) dipindahkan ke bagian depan (lingkaran) karena dengan peletakkan sensor yang jauh di depan lebih memudahkan dalam pendeteksian home maupun garis, dimana bila terdapat garis maka warna hitam akan terdeteksi oleh sensor depan kemudian akan dicek sensor yang lain apakah ada putih atau tidak sementara untuk home, warna putih yang didapat oleh sensor depan. Peletakan tujuh buah sensor garis dapat dilihat pada gambar 2.13.
19
Gambar 2.13. Letak 7 Buah Sensor Garis. Keterangan sebagai berikut :
1. Sensor Depan
2. Sensor Depan Kanan 3. Sensor Depan Tengah 4. Sensor Tengah Kiri 5. Sensor Tengah Kanan 6. Sensor Belakang Kiri 7. Sensor Belakang Kanan
X. Sensor Depan Kiri yang telah dipindahkan ke bagian depan (No. 1)
X
1
2
3
4
5
6
7
20
Sensor garis tersebut dibaca pada mikrokontroller melalui adc 10 bit dengan menggunakan vref sebesar 5v. Keluaran tersebut dibaca dan menghasilkan range antara 0-1023 dimana 0 berarti tegangan hasil dari sensor adalah 0v yang mana diperoleh ketika sensor membaca kondisi putih dan 1023 bila hasil tegangan dari sensor sebesar 5v dimana ketika itu sensor sedang membaca hitam. Data berikut memiliki satuan sampel per sekon.
Data – data yang didapat dari sensor garis adalah sebagai berikut: Tabel 2.3. Data-Data Sensor Garis.
Depan Depan Kanan Depan Tengah Tengah Kiri Tengah Kanan Belakang Kiri Belakang Kanan Putih 697 738 583 265 461 251 460 Hitam 958 937 939 895 896 884 963 Abu 946 948 922 887 905 851 920
Dari data didapat bahwa warna hitam dan putih sudah dapat dibedakan oleh ketujuh sensor tersebut, yang menjadi masalah adalah nilai sensor tersebut cukup dekat untuk warna hitam dan abu-abu. Oleh karena itu, tidak digunakan untuk mendeteksi abu-abu.
2.3. Konsep Dasar Sistem
Berikut adalah penjelasan mengenai blok diagram sistem beserta penjelasannya yang digunakan untuk tugas akhir. Bagian dari diagram blok berikut yang akan di gunakan untuk tugas akhir adalah bagian yang ditandai dengan background warna biru. Sedangkan untuk bagian kuning sudah dikerjakan oleh Jati Wasesa (612011018) serta untuk bagian abu-abu telah dikerjakan oleh Christian Dani (612011005).
21 2.3.1. Diagram Blok
Gambar 2.14. Diagram Blok Sistem
Sistem Pendeteksi boneka dan furniture oleh Adi Gunawan /612012011
Sistem Pengenalan Ruang oleh Jati Wasesa /612011018
Motion dengan Servo Controller SSC-32 oleh Christian Dani /612011005
Blok diagram pada gambar 2.14 dibagi menjadi beberapa bagian dimana terdapat pengendali mikrokontroler utama sebagai pengolah algoritma dan pengendali utama dan mikrokontroler sensor sebagai pengolah data sensor, selain itu terdapat pula penggerak / aktuator dan sumber daya listrik serta extinguisher.
Mikrokontroler Servo Controller (SSC-32) 18 Servo Motor White Line Detector Sensor Jarak SRF04 UVTron Infrared Proximity Sensor TPA81 dan Flame Sensor Extinguisher (Water Sprayer) Mikrokontroler Utama Mikrokontroler Sensor Photodiode Array Battery Lipo 3s 2200 mAh Mic Stop Start Compass
22 1. Mikrokontroler Utama
Fungsi dari mikrokontroler ini adalah sebagai pengendali utama / otak bagi robot yang memproses algoritma serta menerima data digital dari mikrokontroler sensor kemudian mengeksekusi perintah dengan menggerakkan aktuator dan memberikan feedback ke mikrokontroler sensor melalui jalur USART1
(pin TX ke RX).
2. Mikrokontroler Sensor
Mikrokontroler ini berfungsi untuk mengolah data yang didapat oleh sensor-sensor kemudian mengirimkannya berupa data digital ke mikrokontroler utama melalui jalur USART1 (pin TX ke RX). Berikut adalah beberapa perangkat keras sensor yang diolah datanya pada mikrokontroler ini :
a. Tombol Start / Stop dan Sound Activation
Tombol menggunakan switch kaki 2 yang akan tersambung bila ditekan, start digunakan untuk menggerakkan robot bila sound activation tidak berfungsi, sementara stop digunakkan untuk menghentikan robot. Untuk sound activation menggunakan mic yang dihubungkan dengan driver yang akan menangkap suara dengan frekuensi antara 3.7 - 3.9 KHz. b. Sensor Jarak
Terdapat 2 buah sensor jarak yaitu :
- Sensor ultrasonik (SRF04) ini digunakan untuk mendeteksi adanya dinding, sehingga berguna bagi robot untuk dapat melakukan wall following.
- Infrared Proximity Sensor
Sensor IR ini digunakan untuk mendeteksi adanya obstacle.
Data dari sensor ini akan dibaca dan diolah di mikrokontroler sensor.
c. Sensor Garis
Digunakan untuk mendeteksi garis putih yang merupakan tanda dari adanya room. Sensor garis menggunakan photodiode dan LED warna putih. Data dari sensor ini akan diolah oleh mikrokontroler sensor.
d. Sensor Pendeteksi Api
23
-TPA81 digunakan untuk mengetahui titik api, mengembalikan nilai analog, modul sensor ini diakses dengan jalur i2c. Digunakan untuk pointing karena jangkauan sensor memusat pada daerah yang kecil. -UVtron digunakan untuk mengetahui ada atau tidak api di dalam suatu room. Mengembalikan nilai 1 bila terdeteksi api dan 0 bila tidak ada api. Jangkauan luas sehingga robot bisa mendeteksi api walaupun hanya sebagian badan robot yang masuk room.
-Flame Sensor digunakan untuk membantu mendeteksi api pada jarak yang jauh dan jangkauan yang kecil, sehingg dari jauh robot bisa mengetahui kira-kira letak dari api lilin.
3. Penggerak / aktuator
Penggerak berupa 18 buah servo yang dikontrol menggunakan Servo Controller dan menggunakan ATmega8 sebagai pengolah proses penghitungan. Servo controller akan mendapatkan perintah dari pengendali utama untuk melakukan suatu gerak tertentu, yang mana perintah tersebut akan diproses oleh ATMega8 untuk dikalkulasi, lalu akan memberikan perintah kepada SSC-32 yang akan mengirimkan sinyal kepada servo untuk bergerak menuju sudut yang telah didapat dari perhitungan.
4. Pemadam Api
Pemadaman api menggunakan extinguisher berupa water sprayer. Water sprayer tersebut dikendalikan oleh sebuah driver yang akan memberikan arus langsung dari sumber listrik bila mendapat logika high dari mikrokontroler.
5. Sumber Daya
Sumber daya keseluruhan menggunakan sebuah battery LiPo 3s 2200mAh yang dibagi menjadi 2 bagian, bagian pertama akan masuk ke UBEC atas untuk diregulasi tegangannya menjadi 5 volt, tegangan 5 volt akan digunakan untuk menyuplai mikrokontroler dan sensor – sensor sedangkan tegangan 6 volt digunakan untuk menyuplai servo.
![Gambar 2.1. Prinsip Triangulasi [8]](https://thumb-ap.123doks.com/thumbv2/123dok/2380297.2201819/3.893.149.759.145.874/gambar-prinsip-triangulasi.webp)
![Gambar 2.4. Scanning Sensor Ultrasonik SRF04 dan Grafik Hasil Scanning [9]](https://thumb-ap.123doks.com/thumbv2/123dok/2380297.2201819/5.893.133.788.278.867/gambar-scanning-sensor-ultrasonik-srf-grafik-hasil-scanning.webp)
![Gambar 2.5. Bentuk dan Ukuran Lapangan [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2380297.2201819/6.893.144.768.88.1088/gambar-bentuk-dan-ukuran-lapangan.webp)