METODE KALIBRASI TIME DIFFERENT OF ARRIVAL
TDOA UNTUK SISTEM PASSIVE RADAR
TRAYEKTORI ROKET
Wahyu Wldada, Sri KliwatiPeneltti BI dang Tele met ri dan Muatan Roket. LAPAN E-mail: [email protected], [email protected]
ABSTRACT
Design passive ranging b a s e on radio with Time Different of Arrival TDOA (passive RADAR) have been developed for the application of tracking rocket trajectory. Calibration of t h e passive RADAR can be done in launching site for obtaining optimal position, however it is also require to be done in laboratory for testing the system algorithm. This article describes the calibration method of time delay calculation in laboratory u s i n g a n t e n n a cable with various of lengths. We obtain an accurate correlation results between time delay from m e a s u r e m e n t of oscilloscope and calculation TDOA with cross-correlation method. This method is practical a n d effective for calibration system in t h e development of passive RADAR.
Keywords : TDOA, Passive RADAR, Trajectory rocket, Calibration method, Cross-correlation
ABSTRAK
Disain passive ranging berbasis radio dengan metode Time Different of Arrival (TDOA) telah dikembangkan u n t u k aplikasi tracking trayektori roket. U n t u k melakukan kalibrasi passive RADAR ini d a p a t dilakukan di tempat p e l u n c u r a n u n t u k memperoleh posisi y a n g optimal, a k a n tetapi sebelumnya sangat perlu d i l a k u k a n di laboratorium u n t u k menguji algoritma sistem tersebut. Tulisan ini m e m b a h a s metode kalibrasi time
delay tersebut di laboratorium m e n g g u n a k a n kabel a n t e n a d e n g a n berbagai u k u r a n
panjang. Diperoleh hasil korelasi a k u r a t a n t a r a panjang kabel d a n time delay baik dari p e n g u k u r a n osiloskop d a n TDOA dengan cross-correlation. Metode ini terbukti efektif d a n praktis d i g u n a k a n u n t u k sistem kalibrasi dalam p e n g e m b a n g a n passive RADAR. Kata kunci: TDOA, Radio pasif, Lintasan terbang roket, Metode kalibrasi, Koreksi silang
1 PENDAHULUAN
LAPAN telah m e n g e m b a n g k a n berbagai j e n i s roket u n t u k keperluan penelitian d a n sistem p e r t a h a n a n . Untuk keperluan deteksi performa, m a k a sangat diperlukan sistem tracking. Sistem RADAR telah d i g u n a k a n dalam uji p e l u n c u r a n , a k a n tetapi teknologi tersebut relatif m a h a l jika dibeli secara u t u h , sehingga perlu a d a n y a pengem-bangan sistem tracking sejak awal.
Passive RADAR u n t u k keperluan tracking
roket, telah mulai didisain dan disimu-lasikan [Wahyu W., Sri Kliwati, dkk, 2008]. Salah s a t u p r o s e s yang sangat penling adalah pengujian di laboratorium
u n t u k m e n d a p a t k a n algoritma yang optimal. Passive RADAR dapat dirancang-b a n g u n dengan m e n g g u n a k a n array
antenna dengan posisi y a n g berbeda dan hardware u n t u k pemrosesan signal
ter-s e b u t (DSP). Beda waktu dari poter-siter-si a n t e n a y a n g berbeda ini digunakan u n t u k estimasi s u d u t azimuth dan elevasi. Mulai t a h u n 2 0 0 8 dikembangkan sistem RADAR tipe passive u n t u k keperluan pengembangan roket-roket j a r a k j a u h . Dimulai dengan analisa dan
simulasi sistem, selanjutnya a k a n dibuat
prototype hardware baik transmitter
m a u p u n receiver u n t u k uji performanya. Kelanjutan penelitian ini sangat penting, karena dimulai dari hal y a n g d a s a r dan
/
a k a n terus dilanjutkan u n t u k m e m -peroleh sistem y a n g h a n d a l d a n s e s u a i dengan k e b u t u h a n .
Tulisan ini m e m b a h a s metode pengujian TDOA di laboratorium d e n g a n m e n g g u n a k a n radio transmitter, digital osciloscope, d a n b e b e r a p a kabel coaxial d e n g a n panjang y a n g b e r b e d a - b e d a . Panjang kabel y a n g d i g u n a k a n a d a l a h dari 1,5 s a m p a i 3,3 meter. Faktor pro-p a g a s i k e c e pro-p a t a n gelombang elektro-m a g n e t i k di atelektro-mosfir d a n kabel coaxial sedikit berbeda, sehingga selain kalibrasi TDOA s e c a r a k e s e l u r u h a n , propagasi signal di kabel j u g a d a p a t d i k e t a h u i d e n g a n a k u r a t .
2 SISTEM PASSIVE RADAR
Sistem passive r a d a r y a n g telah didisain u n t u k trayektori roket a d a l a h seperti p a d a g a m b a r d i b a w a h y a n g terdiri dari transmitter d a n receiver
(2-2)
M a s i n g - m a s i n g delay w a k t u AT t e r s e b u t diestimasi dengan menggunakan algoritma
cross-correlation [Robert et al., 2000]. J i k a
koordinat t e m p a t p e n g u k u r a n y a n g s a t u a d a l a h (0, 0) d a n p e n g u k u r a n y a n g lain a d a l a h (0, D), m a k a koordinat roket d a p a t dihitung dengan p e r s a m a a n berikut. (2-3) Dari p e r s a m a a n (2-1) s a m p a i (2-3), m a k a koordinat trayektori roket d a p a t diestimasi dari p e r u b a h a n delay w a k t u p a d a masing-masing p a s a n g a n a n t e n n a .
3 METODE KALIBRASI
PASSIVE RADAR
TDOA
Seperti p a d a G a m b a r 3 - 1 , sistem kalibrasi ini terdiri dari transmitter (RF generator), a n t e n a , kabel coaxial, digital
osciloscope, d a n PC. Sinyal dari
gene-rator diterima dengan beberapa a n t e n a dengan panjang kabel yang berbeda-beda. Seperti p a d a Gambar 2-1 jika m e n g g u n a k a n osiloskop, m a k a peng-u k peng-u r a n d a p a t dilakpeng-ukan secara ber-s a m a a n . S k e m a Gambar 3-1 j u g a d a p a t digunakan u n t u k kalibrasi j a r a k propa-gasi u d a r a dengan m e n g g u n a k a n j a r a k a n t a r a n t e n a d a n panjang kabel yang sama. Akan tetapi m u n g k i n a k a n di-p e n g a r u h i oleh di-p a n t u l a n signal dari sekeliling, sehingga dapat j u g a dilakukan secara l a n g s u n g dengan m e n g g u n a k a n kabel, seperti p a d a s k e m a G a m b a r 3-2.
G a m b a r 3 - 1 : Sistem kalibrasi TDOA dengan panjang kabel (£,,
1$, L3) secara simultan
dengan digital osciloscope d a n PC
G a m b a r 3-2: Sistem kalibrasi TDOA d e n g a n p a n j a n g k a b e l (L\,
L2, L3) s e c a r a s i m u l t a n
d e n g a n digital oscilloscope d a n PC
Metode kalibrasi d e n g a n panjang kabel lebih presisi, k a r e n a p a n t u l a n sinyal radio t i d a k a d a . Panjang k a b e l ini a k a n disesuaikan dengan frekuensi sinyal y a n g d i p a n c a r k a n d a n sampling d a t a
dari osiloskop. Alat-alat yang digunakan a d a l a h seperti p a d a Tabel 3 - 1 .
Tabel3-1:ALAT UJI KALIBRASI YANG DIGUNAKAN Instrument RF Generator Osiloskop Coaxial Tipe
Rhode 8& Schwarz Textronik T D S 2 0 2 4 RG58
Generator sinyal m e m p u n y a i k e m a m p u a n hingga 3,3 MHz, s e d a n g k a n osiloskop h a n y a s a m p a i 2 0 0 MHz dengan sampling data 2 G / s . Kabel coaxial y a n g d i g u n a k a n m e m p u n y a i faktor r a m b a t a n kira-kira 0.6-0.8 (tergantung tipenya) di-b a n d i n g k a n d e n g a n r a m di-b a t a n d i u d a r a .
4 TIME DELAY ESTIMATION
Metode time delay ini telah s u k s e s d i g u n a k a n d a l a m aplikasi RADAR, sistem sonar d a n Iain-lain. J i k a sinyal yang diterima p a d a a n t e n a ke 1 a d a l a h x\(t) d a n X2(tj a d a l a h p a d a a n t e n a ke 2, m a k a d a p a t ditulis d e n g a n p e r s a m a a n berikut: x1( 0 = a , 5 ( 0 + n , ( 0 x2( 0 = a25 ( 0 + «2(r) (4-1) (4-2) Disini a a d a l a h a t e n u a s i sinyal di atmosfir, s(t) adalah sinyal dari transmitter,
n(t) a d a l a h sinyal noise p a d a m a s i n g
-masing a n t e n a , d a n T a d a l a h delay masing-masing sinyal. Cross-correlation a n t a r a k e d u a sinyal d i a t a s a d a l a h
Algoritma correlation ini lebih lama, w a k t u prosesnya, sehingga d a p a t p u l a dilakukan p a d a domain frekuensi meng-g u n a k a n FFT (Fast Fourier Transform). Langkah berikutnya a d a l a h m e n g h i t u n g
peak p a d a p e r s a m a a n (4-3), yang d a p a t
ditulis d e n g a n p e r s a m a a n b e r i k u t :
Disini A7i2 a d a l a h nilai estimasi b e d a w a k t u k e d u a sinyal t e r s e b u t di atas. Gambar 4-1 menunjukkan ilustrasi algoritma dari p e r s a m a a n (4-1) s a m p a i d e n g a n p e r s a m a a n (4-4).
G a m b a r 4 1 : Ilustrasi algoritma p e r s a -m a a n (4-1) s a -m p a i (4-4) P e m r o s e s a n TDOA ini s e p e n u h -nya d i l a k u k a n p a d a PC, selain MATLAB y a n g m u d a h d i g u n a k a n d a p a t p u l a d e n g a n p r o g r a m aplikasi Visual Basic.
Komunikasi d a t a a n t a r a osiloskop d a n PC d i l a k u k a n d e n g a n kabel serial RS232. Kontrol p e r i n t a h d a n akusisi dilakukan secara m u d a h dan cepat, serta l a n g s u n g d a p a t m e m p r o s e s d a t a - d a t a t e r s e b u t s e c a r a realtime.
G a m b a r 4-2: S e t u p kalibrasi TDOA d e n g a n RF sinyal generator d a n digital osiloskop 2 G s / s
5 KALIBRASI TDOA DENGAN KABEL COAXIAL
Setup kalibrasi a d a l a h seperti p a d a Gambar 3-2, s e d a n g k a n foto s e t u p
sinyal generator d a n digital osiloskop terlihat seperti Gambar 4-2. Panjang kabel
Li dan L2 dipotong s a m a p a n j a n g 0,5
meter u n t u k referensi sinyal. S e d a n g k a n panjang kabel L3 diganti-ganti d e n g a n panjang y a n g b e r b e d a - b e d a (1,5 meter s a m p a i 3,3 meter). J i k a p a n j a n g kabel a d a l a h L, m a k a delay w a k t u a d a l a h sebagai berikut: (5-1) Misalnya p a n j a n g L adalah 10 Meter, m a k a AT a d a l a h 10/3x108 = 33 nanosecond. Data dari osiloskop setelah ditransfer ke PC via kabel RS232 d e n g a n kecepatan transfer 19200 bps, kemudian d a t a t e r s e b u t diproses u n t u k menghi-t u n g menghi-time delay secara realmenghi-time dengan p e r s a m a a n (4-3) d a n (4-4) di a t a s . Dib a n d i n g k a n d e n g a n propagasi di a t m o s -fer, m a k a propagasi gelombang radio di kabel tipe RG58 y a n g d i g u n a k a n a d a l a h 0.66 kali lebih lambat.
6 PERCOBAAN DAN DISKUSI
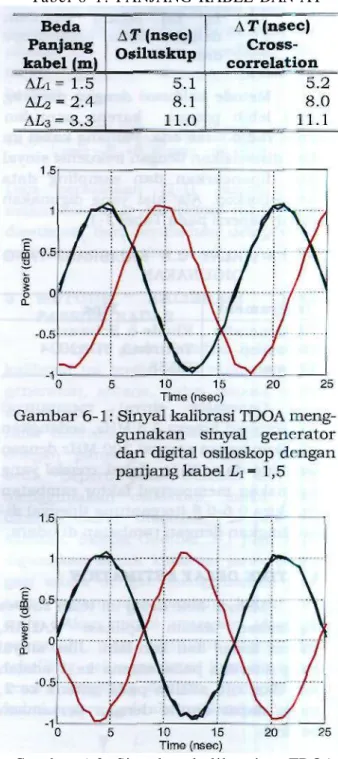
S e t u p p e r c o b a a n a d a l a h seperti Gambar 3-1 dan 4-2. Digital osccilloscope y a n g a d a a d a l a h 2 Giga s a m p l i n g / d e t i k , sehingga resolusi time delay y a n g d a p a t dideteksi a d a l a h 0,5x10-9 a t a u 5 x l 01 0 detik. Minimum j a r a k agar delay w a k t u d a p a t dideteksi a d a l a h 5x10-9x3x108 = 0 . 1 5 meter. Tabel 6-1 a d a l a h tabel h a s i l kalibrasi a n t a r a panjang kabel, delay w a k t u dari osiloskop d a n dari algoritma TDOA. F r e k u e n s i radio dari sinyal gene-r a t o gene-r a d a l a h 60 MHz d e n g a n panjang w a k t u p e n g u k u r a n 25 nsec di osiloskop. G a m b a r 4-2 s a m p a i 6-3 a d a l a h delay w a k t u k i r a - k i r a 5 , 8 , d a n 1 1 n s e c . Hasil p e r h i t u n g a n a n t a r a osiloskop d a n algo-r i t m a TDOA a d a p e algo-r b e d a a n sekitaalgo-r 0.1 n s e c . Hal ini d i s e b a b k a n oleh sampling osiloskop y a n g t e r b a t a s h a n y a 2 G s / s , j i k a lebih b a n y a k lagi (misal 20 G s / s ) ,
m a k a hasilnya a k a n lebih a k u r a t . Peningkatan a k u r a s i j u g a d a p a t d i b a n t u dengan m e n g g u n a k a n t e k n i k sinyal
processing, seperti menggunakan algoritma
interpolasi data, digital filtering.
Tabel 6 - 1 : PANJANG KABEL DAN AT
G a m b a r 6-2: Sinyal kalibrasi TDOA m e n g g u n a k a n sinyal gene-r a t o gene-r d a n digital osiloskop d e n g a n p a n j a n g kabel Li =
2,4
Sinyal RADAR yang paling cocok a d a l a h tidak m e n g g u n a k a n sinyal sinusoidal, a k a n tetapi sinyal yang m e m p u n y a i modulasi frekuensi, a t a u
g a b u n g a n d e n g a n modulasi amplitudo. Sinyal t e r s e b u t misalnya chirp pulse, a k a n tetapi sinyal generator y a n g di-g u n a k a n tidak d a p a t m e m b u a t sinyal RADAR tersebut, sehingga perlu m e m b u a t disain d a n implementasi r a n g k a i a n elektronik tersendiri. Dalam k e s e m p a t a n lain a k a n k a m i disain d a n d i b u a t
prototipe sebagai bagian d a r i RADAR transmitter d a n a k a n k a m i b a h a s lebih
detil d a l a m t u l i s a n tersendiri.
25 5 10 15
Time (nsec)
G a m b a r 6-3: Sinyal kalibrasi TDOA m e n g g u n a k a n sinyal gene-r a t o gene-r d a n digital osiloskop d e n g a n p a n j a n g kabel L\ =
3,3
Selain algoritma TDOA b e r b a s i s w a k t u (time domain), m a k a a d a p u l a algoritma berbasis frekuensi (frequency
domain) menggunakan Fourier Transform
K e h a n d a l a n m a s i n g - m a s i n g algoritma t e r s e b u t a k a n k a m i uji u n t u k d a p a t m e n e n t u k a n sinyal RADAR d a n sistem
receiver y a n g paling optimal.
7 KESIMPULAN
Telah d i r a n c a n g metode kalibrasi TDOA u n t u k p e n g e m b a n g a n sistem
passive RADAR yang a k a n diaplikasikan
u n t u k tracking trayektori roket. J a r a k posisi a n t e n a d a p a t diwakili d e n g a n panjang kabel, sehingga s a n g a t p r a k t i s d a n m u d a h d i l a k u k a n d i laboratorium. Hasil kalibrasi kabel j u g a d a p a t diguna-k a n u n t u diguna-k parameter sistem RADAR yang
m e n g g u n a k a n panjang kabel a n t e n a yang berbeda. Perbedaan delay waktu dari osiloskop dan algoritma sinyal prosesing a d a l a h sekitar 0.1 nsec. Hasil ini c u k u p baik d a n d a p a t ditingkatkan lagi dengan m e n g g u n a k a n sampling d a t a y a n g lebih banyak a t a u dengan algoritma interpolasi d a n filtering. Penelitian beri-k u t n y a adalah mengembangberi-kan algoritma d a n sinyal RADAR yang s e s u a i d e n g a n k e m a m p u a n hardware a g a r memperoleh hasil y a n g optimal.
DAFTAR RUJUKAN
W a h y u Widada; d a n Sri Kliwati, 2 0 0 8 .
Disain Sistem Passive RADAR Radio UHF Untuk Aplikasi Uji Terbang Roket,
Posiding SITIA ITS-Surabaya. Robert J. Purdy et al, 2000.Radar Signal
Processing, Lincoln Laboratory
J o u r n a l Volume 12, N u m b e r 2. Wahyu Widada; Sri Kliwati, dkk, 2 0 0 7 .
Metode Tracking 3 Dimensi Trayek-tori Roket dengan Kombinasi Altimeter dan Circular Array-Antenna
Crossed-Yagi, JANAS September.
S a t r i a G u n a w a n Zain; Adi S u s a n t o ; T. Sri Widodo; Sri Kliwati; Wahyu Widada, 2 0 0 8 . Prediksi Sudut
Terima Antena Radio Tracking Dari Pemancar di Payload Roket, Seminar
Nasional SITIA ITS S u r a b a y a .
Wahyu Widada, 1994. Rancangbangun
Robot Pencari Asal Arah Suara Berbasis Jaringan Saraf Tiruan,
Thesis Sarjana Engineering Waseda University, Tokyo JAPAN.
Donald F. Breslin, Adaptive Antenna
Arrays Applied To Position Location,
Master Thesis Virginia Polytechnic Institute a n d State University.
Maria Kelly, 2 0 0 6 . Compact, Low-Cost
Direction-Finding Using Time to Digital Converters", 3rd EMRS DTC