Bab 2
STUDI LITERATUR
Uji Model Fisik Pemecah Gelombang Tipe Tiang Pancang Bertirai2.1 Model Uji Fisik
Untuk dapat memecahkan permasalahan teknik para insinyur teknik bergantung pada tiga teknik yang berbeda namun saling terkait satu dengan yang lainnya, teknik-teknik ini adalah:
• Observasi dan pengukuran lapangan, • Observasi dan pengujian laboratorium • Kalkulasi matematis.
2.1.1 Prinsip Pemodelan Fisik
Studi laboratorium pada umumnya dinamakan model fisik karena menggunakan reproduksi miniatur dari sebuah sistem fisik. Pemodelan Fisik tidak diperlukan selama pemodelan numerik dapat menggambarkan fenomena fisik yang sebenarnya. Belum semua fenomena fisik dapat di-matematika-kan sampai saat ini
Jadi Pemodelan Fisik dapat dilakukan apabila:
1. Fenomena yang akan dilihat adalah fenomena kestabilan dari bangunan pantai. 2. Data kalibrasi lapangan untuk pemodelan matematika tidak tersedia.
3. Area yang dimodelkan tidak terlalu luas dimana maksimum skala pemodelan adalah maksimum 1:40. Apabila pemodelan dengan skala lebih kecil dari 1:40 semisal 1:50, maka terdapat kondisi dimana efek tegangan permukaan air dapat berakibat besar terhadap proses pemodelan di laboratorium.
4. Tidak ada model matematika untuk memodelkan suatu permasalahan.
Selanjutnya apabila terjustifikasi bahwa uji fisik harus dilaksanakan, maka harus ditentukan wahana uji fisik mana yang cocok untuk suatu kasus. Wahana yang ada adalah:
1. Pada saluran gelombang 2-D 2. Pada kolam gelombang 3-D
Uji Fisik dilakukan pada saluran gelombang 2-D bila didapatkan:
1. Pemodelan dilakukan untuk mengamati kestabilan suatu bangunan pantai.
2. Pemodelan dilakukan untuk pengamatan detail dengan skala besar yakni lebih besar dari 1:10, sehingga efek skala bisa diminimalisir.
Prinsip Pemodelan Fisik adalah :
1. Menentukan variabel yang berpengaruh dalam suatu fenomena di lapangan seperti tinggi gelombang, kemiringan struktur dll.
2. Melakukan penyederhanaan variabel pada point (1) di atas untuk memudahkan identifikasi pemodelan yang diperlukan. Proses penyederhanaan variabel adalah dengan cara analisa dimensi.
3. Setelah analisa dimensi dilakukan maka diidentifikasikan variabel apa saja yang akan digunakan dan diubah-ubah nilainya, hal ini juga mengingat keterbatasan biaya dan kemampuan laboratorium.
4. Melakukan pen-skala-an dari prototipe menjadi model yakni meminiaturkan prototipe menjadi lebih kecil untuk diletakkan di laboratorium, untuk itu digunakan prinsip bahwa parameter bilangan Froude antara prototipe dan model harus sama.
2.1.2 Tujuan Pemodelan Fisik
Svendsen (1985) membuat tiga tujuan yang dapat dikejar menggunakan model fisik (atau eksperimen laboratorium):
1. Mencari pendekatan kualitatif ke dalam fenomena yang belum terdefinisikan atau dipahami (seperti formasi turbulensi ketika gelombang pecah, formasi dari lubang
scour/gerusan pada struktur pantai).
2. Mendapatkan pengukuran untuk memverifikasi sebuah hasil teoritis (seperti gelombang nonlinear pada arus searah atau gelombang nonlinear yang saling berinteraksi).
3. Mendapatkan pengukuran untuk fenomena yang begitu rumitnya hingga tidak dapat didekati secara teoritis (seperti stabilitas breakwater rubble-mound atau suspensi sedimen pada dasar laut ripple (ripple bed)).
2.1.3 Keuntungan dari Model Fisik
Model-model fisik dibangun dan dioperasikan dengan skala yang dikurangi, menawarkan sebuah pilihan dalam hal memeriksa fenomena pantai yang berada jauh di luar kemampuan analisa kita. Dalrymple (1985) menyatakan dua keuntungan yang dapat diperoleh dengan menggunakan model fisik untuk mereplikasi proses pantai (nearshore):
1. Ukuran model yang kecil mengijinkan pengumpulan data yang lebih mudah sepanjang peraturan pada biaya yang dikurangi, dimana pengumpulan data lapangan lebih mahal dan sulit, dan simulasi pengukuran lapangan sangat sulit dicapai.
2. Eksperimen dapat kita kendalikan sesuai kemampuan laboratorium. 3. Dapat melihat umpan balik secara langsung.
2.1.4 Kerugian dari Model Fisik
Meskipun terdapat beberapa keuntungan yang terlihat jelas dalam eksperimen dan pemodelan fisik, model fisik hidraulik memiliki beberapa efek serius, terutama:
1. Efek skala
Efek skala yang umum terjadi pada model pantai adalah gaya viskos/kekentalan yang relatif lebih besar pada model berskala dibandingkan pada kondisi prototipenya. Semakin kecil skala (di atas 1:40) maka efek viskositas, ataupun efek tegangan permukaan air akan menjadi besar terhadap keseluruhan eksperimen.
2. Efek laboratorium
Efek laboratorium dapat mempengaruhi proses yang disimulasikan pada tingkatan dimana pendekatan yang layak dari prototipe tidak dapat dipenuhi. Efek laboratorium seperti ini muncul dari ketidakmampuan untuk menciptakan kondisi gaya yang realistis dan pengaruh batasan model ketika disimulasikan. Sebuah efek laboratorium yang umum muncul ketika gelombang acak dibangkitkan di dalam model untuk memperkirakan arah gelombang yang terjadi pada kondisi yang sebenarnya di alam. Terkadang semua fungsi gaya dan kondisi batas yang berlaku di alam, tidak dilibatkan di dalam model fisik, dan fungsi serta kondisi yang hilang ini harus dibuat penilaian dan diperhitungkan dalam
evaluasi dari hasil model. Sebagai contoh, tegangan geser angin yang bekerja pada permukaan bebas dapat membangkitkan sirkulasi arus dekat pantai yang signifikan di alam, yang tentunya tidak ditemukan pada model, yang hanya melibatkan pembangkitan gelombang mekanik.
2.2 Analisa Dimensi
Analisa dimensi adalah alat konseptual yang sering diterapkan dalam ilmu teknik untuk memahami keadaan fisik yang melibatkan besaran fisik yang berbeda-beda untuk memeriksa ketepatan penurunan persamaan, Jadi, Konsep dasar analisa dimensi adalah menyederhanakan jumlah variabel terpisah yang tercakup dalam suatu sistem fisik tertentu menjadi grup variabel tak berdimensi dengan jumlah yang lebih kecil. Susunan grup variabel dipilih sedemikian rupa sehingga masing-masing grup menggambarkan karakteristik fisik yang signifikan.
Dalam Sistem Internasional, semua parameter fisik dalam teknik kelautan dapat dinyatakan dalam tiga dimensi dasar yakni massa (M), panjang (L), waktu (T).
Variabel dapat dibedakan berdasarkan dimensinya menjadi Geometris dengan dimensi L
Kinematis dengan dimensi L,T Dinamis dengan dimensi M,L,T Variabel Tak Berdimensi
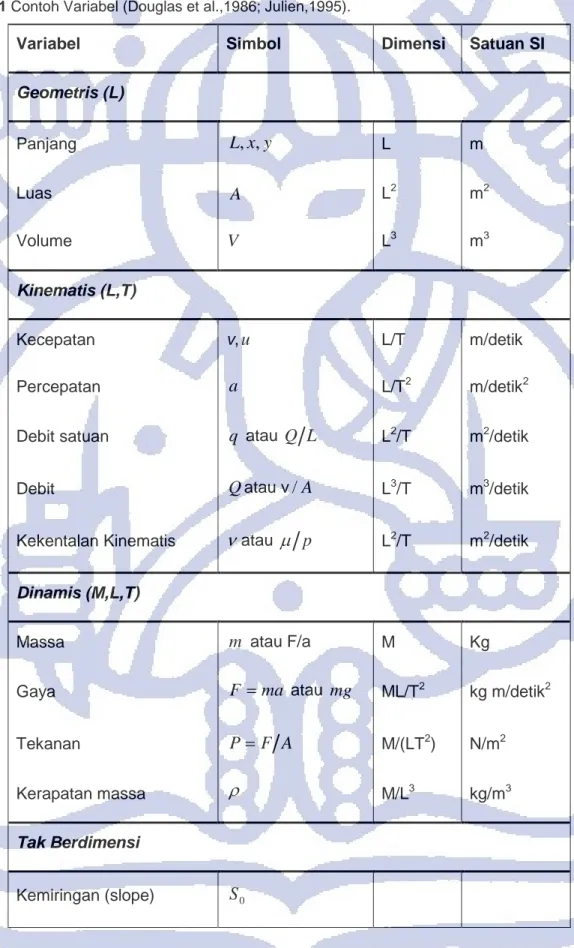
Tabel 2. 1 Contoh Variabel (Douglas et al.,1986; Julien,1995).
Variabel Simbol Dimensi Satuan SI
Geometris (L) Panjang
L
,
x
,
y
L m Luas A L2 m2 Volume V L3 m3 Kinematis (L,T) Kecepatan v,u
L/T m/detik Percepatana
L/T2 m/detik2Debit satuan q atau
Q
L
L2/T m2/detikDebit Qatau v/A L3/T m3/detik
Kekentalan Kinematis
ν
atauµ
p
L2/T m2/detikDinamis (M,L,T)
Massa
m
atau F/a M KgGaya F =ma atau mg ML/T2 kg m/detik2
Tekanan
P
=
F
A
M/(LT2) N/m2Kerapatan massa
ρ
M/L3 kg/m3Tak Berdimensi
Variabel Simbol Dimensi Satuan SI
Specific Gravity
G
=
γ
sγ
airBilangan Reynolds
R
e=
uh
ν
Bilangan Froude
F
r=
ν
gy
Teori analisa dimensi adalah murni matematika dimensi dan kuantitas, yang terdiri dari metoda pembentukan variabel-variabel yang signifikan ke dalam grup yang tak berdimensi.
Satu langkah pertama dalam analisa dimensi dalam satu fenomena fisik adalah memutuskan variabel fisik apa saja yang berpengaruh dalam fenomena fisik yang ditinjau. Setelah variabel fisik ini ditentukan maka dapat dilakukan eksperimen di laboratorium untuk menentukan hubungan antara variabel ini. Terhadap variabel ini dilakukan analisa dimensi untuk diperoleh variabel tak berdimensi yang merupakan kombinasi antara variabel-variabel fisik ini. Sehingga jumlah variabel yang ditinjau dalam satu eksperimen menjadi berkurang. Alasan mengapa analisa dimensional digunakan adalah:
1. Hasil model fisik bersifat umum, dapat berlaku di lapangan, dan tidak tergantung pada sistem unit satuan tertentu (SI, American Units, dll).
2. Lebih sedikit variabel yang dikerjakan.
Konsep dasar analisa dimensi adalah menyederhanakan jumlah variabel terpisah yang tercakup dalam suatu sistem fisik tertentu menjadi grup variabel tak berdimensi dengan jumlah yang lebih kecil. Susunan grup variabel dipilih sedemikian rupa sehingga masing-masing grup menggambarkan karakteristik fisik yang signifikan. Teori analisa dimensi adalah murni matematik dan kuantitas, yang terdiri dari metoda pembentukan variabel-variabel yang signifikan ke dalam grup yang tidak berdimensi. Salah satu teori analisa dimensi yang akan dibicarakan dalam hal ini adalah Metoda Buckingham-π. Analisis dimensi meliputi langkah-langkah:
1. Identifikasi variabel independen yang penting yang mempengaruhi proses. 2. Pilih variabel mana yang akan menjadi variabel dependen.
3. Tentukan berapa banyak produk variabel tak berdimensi yang diperoleh dengan analisa dimensi.
Apabila kita lihat langkah 4. di atas, kita dapat mengetahui bahwa pihak peneliti akan lebih mudah meng-analisa suatu kejadian dengan hanya tergantung pada variabel yang lebih sedikit. Hal lain yang berguna apabila kita bekerja dengan variabel tak berdimensi adalah generalisasi dari penggunaan hasil dari penelitian untuk diterapkan di lapangan, dimana pada hasil yang dipresentasikan dalam bentuk variabel tak berdimensi berlaku tanpa perlu memperhatikan sistem satuan atau lokasi seperti plot di bawah ini.
Gambar 2. 1 Variabel tak berdimensi A dan B dari hasil eksperimen, dan grafik ini berlaku untuk seluruh sistem satuan.
Satu fenomena yang bentuk persamaannya tak tergantung dari unit pengukuran, persamaan tersebut dapat direduksi menjadi produk variabel tak berdimensi yang masing-masing variabel tak berdimensi tersebut terbentuk dari variabel-variabel berdimensi.
Metode Buckingham Phi (π)
Metoda Buckingham-π menyatakan bahwa kuantitas fisik sejumlah n dengan dimensi dasar r secara umum dapat disusun menjadi hanya (n-r) grup dimensi independent yang dikenal dengan nisbah (ratio) π. Jika jumlah variabel ditulis dengan n, dan dimensi dasar ditulis dengan r, maka jumlah variabel non-dimensional (
δ
) yang dihasilkan dari analisa dimensional adalah,
δ
= −
n r
...(2.1) Secara umum, aturan pemakaian metoda ini adalah:1. Variabel yang terpilih harus variabel fisik yang terpenting 2. Variabel yang terpilih harus meliputi semua dimensi
3. Variabel independen yang tidak berulang sedapat mungkin harus dimasukkan 4. Variabel aliran dasar yang relevan harus dimasukkan, yaitu:
Variabel geometris (L) Variabel kinematis (L,T) Variabel dinamis (L,T,M)
Langkah-langkah pemakaian adalah: 1. Mereduksi data
Buat daftar semua variabel fisik yang terkait dalam suatu sistem berdasarkan tipenya: variabel geometris, kinematis, dan dinamis.
2. Matrik dimensi satuan
Buat matrik dimensi satuan dari variabel fisik pada point (1). 3. Tentukan Jumlah produk non-dimensional
Menggunakan persamaan (2.1) 4. Turunkan nisbah (ratio) π
[ ] [ ] [ ] [ ]
kn n k k kV
V
V
V
3 3...
2 2 1 1=
δπ
...(2.2) Selesaikan persamaan (2.2) Didasarkan mendapatkan variabel independen dan dependen yang diinginkan.
2.3 Penskalaan
2.3.1 Skala Model
Skala model dapat dibedakan berdasarkan, 1. Karakteristiknya
i. model fisik
a. model hidrolis model b. model non-hidrolis ii. model numerik
2. Gaya yang dominan i. model Reynolds ii. model Froude iii. model Newton iv. model Euler
3. Jenis dasar model
i. model dasar tetap (fixed bed model)
ii. model model dasar berubah (moveble bed model) 4. Jenis aliran, dan kompressibilitas fluida.
2.3.2 Menentukan Skala Model
Skala dasar untuk sembarang model hidrolis adalah skala geometris, yaitu nisbah antara dimensi panjang dalam model dan dimensi panjang dalam prototipe. Pemilihan skala geometris yang cocok tergantung pada tipe sistem fluida yang akan distudi, dan bergantung pada ruang yang tersedia untuk membuat model.
Namun demikian persyaratan kesetaraan dinamis dapat dipakai juga untuk menentukan skala model yang lain. Hal ini diperlukan untuk mendapatkan model yang memenuhi kesetaraan dinamis sehingga pengukuran yang dilakukan pada model dapat digunakan untuk menentukan harga-harga dalam prototipe.
Walaupun kriteria skala bergantung pada hukum model khusus yang harus diikuti, prosedur yang dipakai untuk menentukan skala tidak berubah. Oleh karena itu disini hanya akan dibahas dua macam hukum yang paling banyak dipakai dalam model hidrolika, yaitu hukum model untuk gaya gravitasi dan gaya viskositas. Sedangkan skala model berdasarkan gaya-gaya yang lain akan diberikan resumenya dalam tabel.
Kriteria Froude
Jika gaya gravitasi dominan dalam suatu sistem, maka skala model yang dipakai berdasarkan Bilangan Froude. Bilangan Froude harus sama antara model dan prototipe.
( ) ( )
F
r m=
F
r p ... (2.3) p mgL
v
gL
v
=
... (2.4)dimana subskrip
m
dan pmenunjukkan model dan prototipe. Dengan menganggap bahwa percepatan gravitasi adalah konstan diseluruh muka bumi, maka2 1
=
p m p mL
L
v
v
... (2.5)Dalam hal ini Lm/Lp dinamakan skala geometri. Dalam pembahasan disini skala geometris selalu diberikan dalam bentuk Lm/Lp, dan nisbah dinyatakan dengan satuan penyebutnya.
Persamaan (2.5), dan skala-skala lain yang akan diuraikan, dapat dinyatakan dalam 2 (dua) cara. Pertama dipakai untuk menentukan kecepatan dimana model harus dioperasikan untuk menjamin bahwa model akan mensimulasi kecepatan prototip secara akurat.
p m v v = 2 1
p mL
L
... .(2.6)Kedua, kombinasi yang lebih umum, yaitu dipakai untuk memprediksi kecepatan prototip berdasarkan kecepatan yang diukur dari model.
m p v v = 2 1
m pL
L
... (2.7)Skala lain dapat diturunkan dengan menstransformasikan persyaratan Froude kedalam bentuk yang lain. Transformasi untuk menentukan komponen skala waktu dilakukan dengan cara: T L v∝ ... sehingga (2.8) 2 1
=
p m p mL
L
T
T
atau 2 1 r rL
T
=
... (2.9)Skala gaya ditentukan dengan cara yang sedikit berbeda. Karena gaya inersia selalu diperhitungkan pada semua sistem fluida, maka pada umumnya skala gaya didasarkan pada nisbah antara gaya terukur dan gaya inersia, atau
p m
L
v
F
v
L
F
=
2 2 2 2ρ
ρ
... .(2.10) sehingga, 2 2
=
p m p m p m p mv
v
L
L
F
F
ρ
ρ
... (2.11)Jika model dan prototip menggunakan media fluida yang sama, nisbah rapat massa sama dengan unity, sehingga persamaan (2.11) menjadi
3 = p m p m L L F F atau
F
r=
L
3r ... .(2.12) Skala ReynoldsSkala untuk model yang melibatkan gaya viskositas dikembangkan dengan cara persis diatas, hanya disini digunakan gaya viskositas:
p m
v
vL
v
vL
=
... (2.13) atau p m p m p mL
L
v
v
v
v
=
... .(2.14) Selanjutnya, waktu dan gaya dapat diturunkan sebagai berikut:m p p m p m p m
L
L
v
v
L
L
T
T
=
atau 2 = p m p m p m L L v v T T ... (2.15) dan 2 = p m p m p m v v F Fρ
ρ
... (2.16)Jika pada model dipakai fluida yang sama, dan dioperasikan pada kondisi yang sama, maka rapat massa dan viskositas antara model dan prototip adalah sama, sehingga persamaan-persamaan (2.15) dan (2.16) berturut-turut menjadi,
2 = p m p m L L T T atau
T
r=
L
2r ... (2.17)1
=
p mF
F
atauF
r=
L
or... (2.18)Besaran-besaran yang lain dapat diturunkan dengan cara yang sama. Tabel 2.2 memperlihatkan skala model untuk parameter geometris, kinematis, dan dinamis berdasarkan hukum Froude, Reynolds, Weber, dan Cauchy.
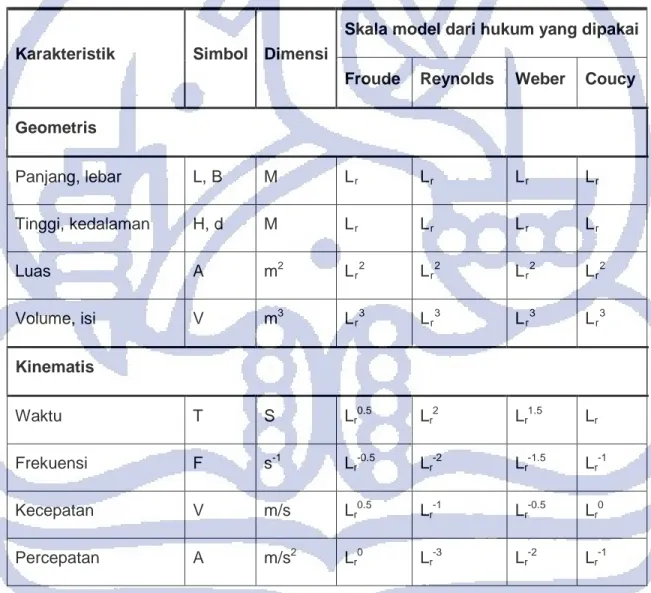
Tabel 2. 2 Skala model berdasar kriteria yang dipakai.
Karakteristik Simbol Dimensi
Skala model dari hukum yang dipakai
Froude Reynolds Weber Coucy
Geometris Panjang, lebar L, B M Lr Lr Lr L Tinggi, kedalaman r H, d M Lr Lr Lr L Luas r A m2 Lr2 Lr2 Lr2 Lr Volume, isi 2 V m3 Lr3 Lr3 Lr3 Lr Kinematis 3 Waktu T S Lr0.5 Lr2 Lr1.5 Lr Frekuensi F s-1 Lr-0.5 Lr-2 Lr-1.5 Lr-1 Kecepatan V m/s Lr0.5 Lr-1 Lr-0.5 Lr0 Percepatan A m/s2 Lr0 Lr-3 Lr-2 Lr-1
Karakteristik Simbol Dimensi
Skala model dari hukum yang dipakai
Froude Reynolds Weber Coucy Gravitasi G m/s2 Lr0 Lr-3 Lr-2 Lr-1 Debit Q m3/s Lr2.5 Lr Lr1.5 Lr2 Debit/satuan lebar Q m3/s.m Lr1.5 Lr0 Lr0.5 Lr Dinamis Massa m kg Lr3 Lr3 Lr3 Lr3 Impulse Fi kg.m/s Lr3.5 Lr2 Lr2.5 Lr3 Viskositas dinamis μ kg.m/m Lr1.5 Lr0 Lr0.5 Lr Rapat massa Ρ kg/m3 Lr0 Lr0 Lr0 Lr0 Gaya (Berat) F N Lr3 Lr0 Lr Lr2 Kerja W Nm Lr4 Lr Lr2 Lr3 Momen M Nm Lr4 Lr Lr2 Lr3 Energi E Nm Lr4 Lr Lr2 Lr3 Tegangan permukaan Σ N/m Lr2 Lr-1 Lr0 Lr1 Tekanan P N/m2 Lr Lr-2 Lr-1 Lr0 Berat spesifik
γ
N/m3 Lr0 Lr-3 Lr-2 Lr-1 Tenaga P Nm/jam Lr3.5 Lr-1 Lr0.5 Lr2 Keterangan : Lr = Lm/LpDalam pemodelan fisik bangunan pengaman pantai, yang digunakan adalah skala dengan kriteria Froude.
2.3.3 Model Terdistorsi
Dalam beberapa kasus, diperlukan pembuatan model yang tidak setara benar dengan prototipnya. Khususnya untuk model-model yang sangat luas, misalnya sungai, estuari, pelabuhan, proses pantai, dan lain-lain, model tidak dapat dibuat sebesar yang seharusnya. Dari segi biaya dan ruang, lebih diinginkan pembuatan model yang lebih kecil. Namun hal ini menyebabkan kedalaman akan menjadi hanya beberapa millimeter, demikian juga kekasaran permukaan, sehingga kondisi turbulen tidak dapat tercapai. Oleh karena itu diperlukan jalan keluar untuk memenuhi kedua persyaratan tersebut dan sekaligus pertimbangan biaya dan ruang. Jalan keluar yang dapat ditempuh adalah pembuatan model terdistorsi, yaitu suatu model dimana skala dimensi vertikal tidak sama dengan skala dimensi horizontal.
Ada beberapa alasan yang dapat dikemukakan, mengapa kita perlu memakai model terdistorsi, yaitu:
Mengurangi biaya Memperkecil ruang
Mempercepat kecepatan aliran
Memperpendek waktu pengetesan model Meningkatkan Bilangan Reynolds dalam model
Memperbaiki secara relatif tingkat akurasi pengukuran Mengurangi kehilangan air dalam model
Model terdistorsi vertikal adalah alat untuk mencapai sedekat mungkin kesetaraan terhadap proses alamiah dengan memperhatikan parameter karakteristik tertentu yang dominan. Model ini selalu dipakai ketika kesetaraan geometri model tidak terdistorsi secara teknis tidak dapat dibuat.
Disamping alasan pemilihan model terdistorsi tersebut diatas, ada beberapa keterbatasan dalam membuat model terdistorsi, yaitu:
Ketersediaan ruang dalam laboratorium membatasi ukuran maksimum model yang akan dibuat (scale-limit space).
Toleransi maksimum yang diperkenankan dalam membuat model juga membatasi batas maksimum skala model yang mungkin dibuat.
Untuk menghindari kekasaran model yang berlebihan, kekasaran model
K
m tidak boleh lebih dari sepuluh kali dari kekasaran prototipe Kp. Ketentuan ini juga berperan ikut menentukan skala model. Km Kp =Ks. Jika material granular tidak kohesif (non-cohesive) dipakai untuk model dasar tidak tetap (moveble bed), ukuran partikel harus cukup besar untuk mencegah terjadinya transportasi partikel tersebut oleh aliran (smoothness limit).
Kapasitas debit maksimum pada laboratorium juga mungkin menjadi penentu skala model yang dibuat (discharge limit).
Dalam model terdistorsi dikenal apa yang disebut faktor distorsi atau laju distorsi “
n
” yang menyatakan hubungan antara skala horizontal terhadap skala vertikal,n
=
L
HL
V>
1
untuk model terdistorsi vertikal, dann
=
L
HL
V=
1
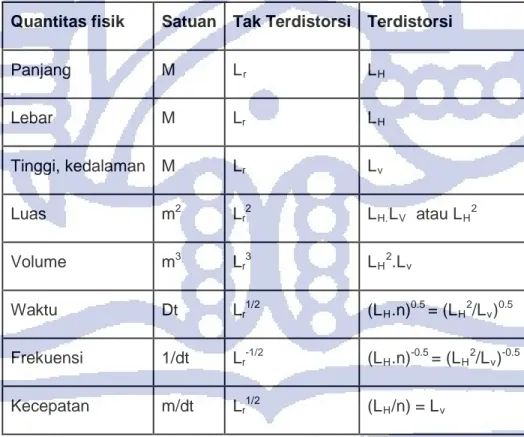
untuk model tidak terdistorsi. Perbandingan kuantitas fisik untuk model terdistorsi dan tidak terdistorsi berdasarkan hukum model Froude disajikan dalam Tabel 2.3 berikut,Tabel 2. 3 Perbandingan Skala Model Antara Model Terdistorsi dan Tak Terdistorsi. Quantitas fisik Satuan Tak Terdistorsi Terdistorsi
Panjang M Lr L Lebar H M Lr L Tinggi, kedalaman H M Lr L Luas v m2 Lr2 LH.LV atau LH Volume 2 m3 Lr3 LH2.L Waktu v Dt Lr1/2 (LH.n)0.5 = (LH2/Lv) Frekuensi 0.5 1/dt Lr-1/2 (LH.n)-0.5 = (LH2/Lv) Kecepatan -0.5 m/dt Lr1/2 (LH/n) = Lv
Percepatan m/dt2 Lr0 1/n = Lv/L Debit H m3/dt Lr2.5 (LH2.5/n1.5) = LH/Lv Gaya 1.5 N Lr3 - Tekanan N/m2 Lr LH/n = Lv Berat spesifik N/m3 Lr0 1/n = Lv/LH Bilangan Reynolds - Lr1.5 (LH/n)1.5 = Lv1.5
Sumber: Robert J Kodoatie, 2002.
Di dalam pembahasan selanjutnya perbandingan antara skala model:skala prototipe untuk suatu kuantitas tertentu dilambangkan denganN,
m r L p m V p
L
L
N
L
V
N
V
dsb
=
=
=
Dimana