BAB III
PERANCANGAN SISTEM
Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari algoritma robot.
3.1. Sistem Kontrol
3.1.1. Kontrol Actuator Robot
Robot GP ini memiliki 18 motor servo, dengan rincian 3 servo di setiap lengan dan 6 servo di setiap kaki. Dengan demikian robot akan memiliki 18 derajat kebebasan sehingga pergerakan robot akan menyerupai pergerakan dari manusia. 18 motor servo ini akan dikontrol menggunakan servo controller CM530.
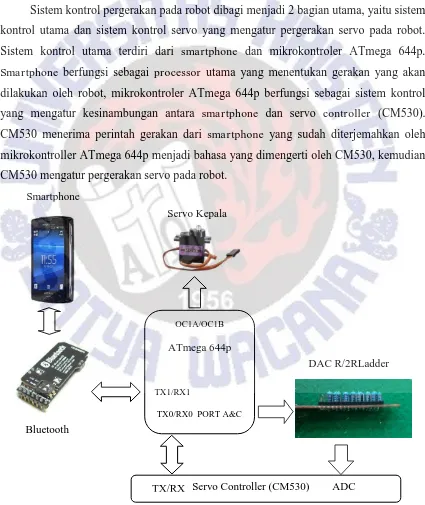
3.1.2. Kontrol Utama
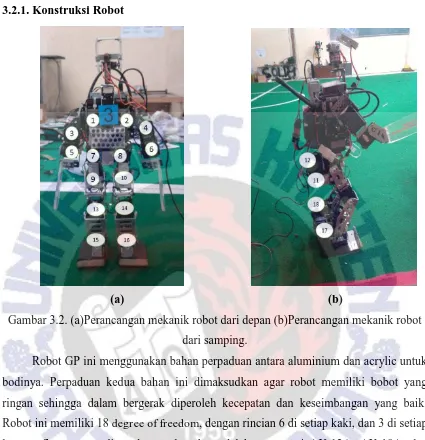
3.2. Desain Perangkat Keras 3.2.1. Konstruksi Robot
(a) (b)
Gambar 3.2. (a)Perancangan mekanik robot dari depan (b)Perancangan mekanik robot dari samping.
Tabel 3.1. Tabel Keterangan Mekanik Robot.
Kecepatan Tanpa Beban 59 rpm pada 12v
3.2.2. Mikrokontroler Tipe Atmega 644p
Mikrokontroller Atmega 644p digunakan untuk menerima perintah dari smartphone android melalui bluetooth. Perintah yang diterima yaitu perintah untuk mengatur gerak servo kepala dan gerak servo tubuh. Pergerakan servo tubuh diatur dengan cara mengirimkan paket gerakan ke CM-530.
3.2.3. Modul Bluetooth
Modul bluetooth digunakan untuk media pengiriman data yang berupa perintah dari smartphone android ke mikrokontroler. Perintah akan dikirimkan dari smartphone melalui bluetooth sehingga diperlukan modul bluetooth agar mikrokontroler dapat terhubung dengan smartphone dan menerima data yang dikirimkan.
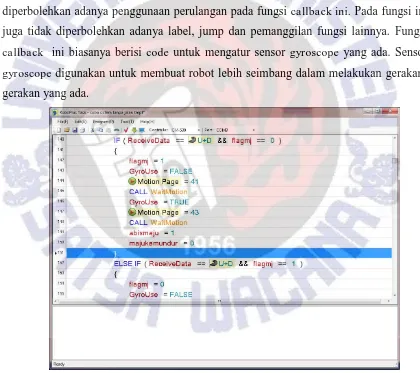
3.2.4. Sensor Gyroscope
Sensor gyroscope tipe GS-12 ini digunakan oleh CM-530 untuk mengatur keseimbangan robot GP. Sensor ini digunakan dengan cara memberikan offset pada kaki robot dengan id 11,12,17 dan 18 untuk axis x dan 13,14,15 dan 16 untuk axis y saat robot dalam kondisi yang tidak seimbang.
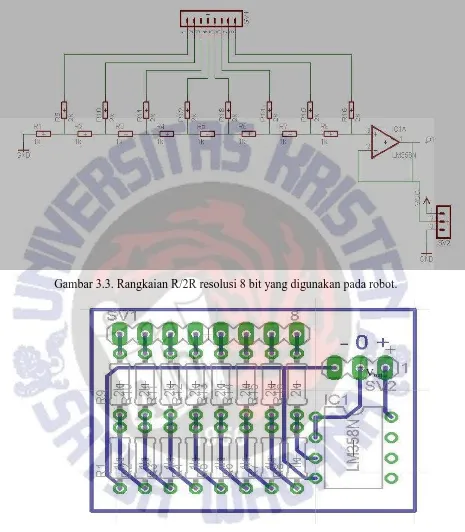
3.2.5. R/2R Ladder
Gambar 3.3. Rangkaian R/2R resolusi 8 bit yang digunakan pada robot.
Gambar 3.4. Rangkaian skematik R/2R resolusi 8 bit.
Vout
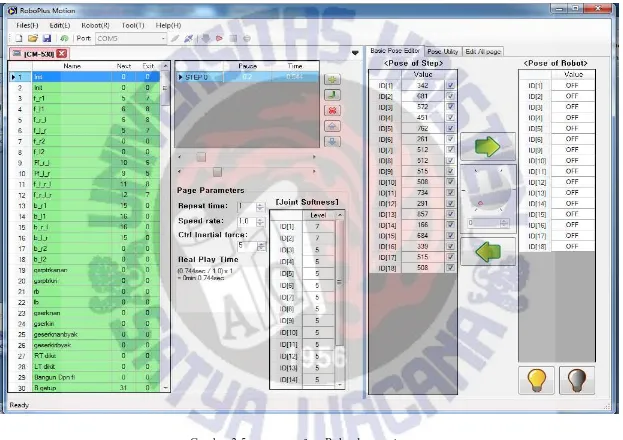
3.3. Bagian Software 3.3.1. Roboplus Motion
3.3.3. Roboplus Task
3.3.4. Algoritma CutMotion
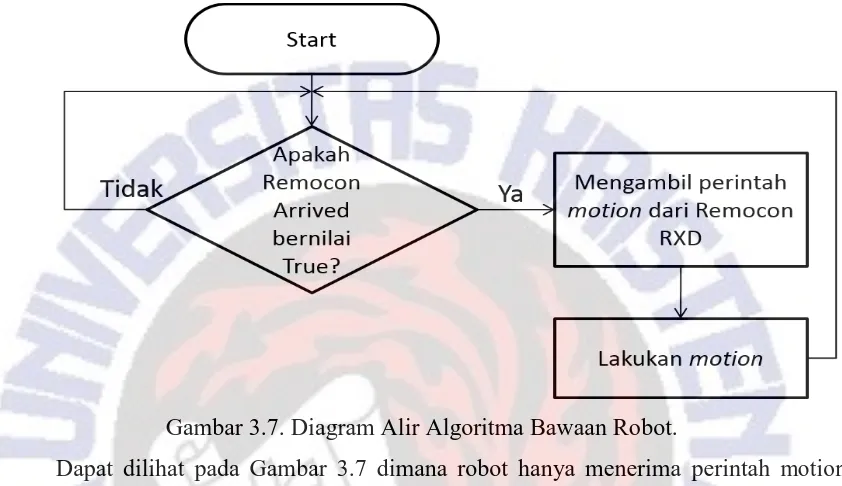
Pada bagian ini akan dijelaskan 2 buah flowchart yang digunakan untuk menggambarkan algoritma robot saat bergerak. Flowchart pertama merupakan flowchart yang digunakan tahun lalu saat robot pertama kali dibeli. Flowchart kedua merupakan flowchart yang digunakan sekarang dengan algoritma cut motion.
Gambar 3.7. Diagram Alir Algoritma Bawaan Robot.
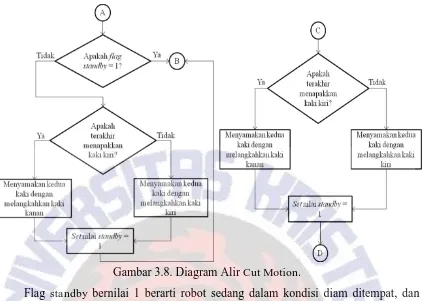
Gambar 3.8. Diagram Alir Cut Motion.
Flag standby bernilai 1 berarti robot sedang dalam kondisi diam ditempat, dan sebaliknya jika flag standby bernilai 0 berarti robot tidak dalam kondisi diam ditempat. Flowchart bagian A dan C berfungsi untuk menyamakan kaki kanan dan kaki kiri robot dan membuat flag standby bernilai 1 lagi. Perbedaan flowchart bagian A dan C yaitu pada flowchart bagian A masih ada kemungkinan jika flag standby bernilai 1, namun pada flowchart bagian C flag standby sudah pasti bernilai 0.
Pertama-tama flag standby bernilai 1. Robot menunggu perintah motion dari smartphone kemudian robot akan membandingkan apakah perintah motion berulang atau motion tidak berulang. Jika motion tidak berulang dan flag standby bernilai 1 maka robot akan langsung melakukan motion tersebut. Namun jika flag standby bernilai 0 maka robot akan masuk ke flowchart bagian C kemudian melakukan motion tersebut. Jika motion merupakan motion berulang dan flag standby bernilai 1 maka robot akan melakukan jalan di tempat terlebih dahulu kemudian melakukan motion berulang dengan kaki kanan atau kaki kiri terlebih dahulu tergantung oleh kaki yang terakhir menapak. Namun jika flag standby bernilai 0 maka robot akan langsung melakukan motion berulang tersebut yang dimulai dengan kaki kanan atau kaki kiri tergantung oleh kaki yang terakhir menapak.
![Tabel 3.2. Tabel Spesifikasi Servo AX-12A[8].](https://thumb-ap.123doks.com/thumbv2/123dok/920513.480286/4.595.100.502.206.630/tabel-tabel-spesifikasi-servo-ax-a.webp)