Diajukan Guna Melengkapi Sebagian Syarat dalam mencapai Gelar Sarjana Strata Satu ( S1 )
Di susun oleh :
NAMA : EKO YULIYANTO
NIM : 41405120072
PROGRAM STUDI : TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA JAKARTA
2008
Nama : Eko Yuliyanto
NIM : 41405120072
Jurusan : Teknik Elektro Fakultas : Teknologi Industri
Judul Skripsi : Modifikasi Sistem Kontrol Mesin Compressor Screw Menggunakan PLC Omron Di PT.
Gajah Tunggal Tbk.
Dengan ini menyatakan bahwa hasil penulisan skripsi yang saya buat ini merupakan hasil karya sendiri dan benar keasliannya. Apabila ternyata dikemudian hari penulisan skripsi ini merupakan plagiat atau penjiplakan terhadap karya orang lain, maka saya bersedia mempertanggungjawabkan sekaligus bersedia menerima sanksi berdasarkan aturan tata tertib di Universitas Mercu Buana. Demikian pernyataan ini saya buat dalam keadaan sadar dan tidak dipaksakan.
Jakarta, Desember 2008
Eko Yuliyanto
Nama : Eko Yuliyanto
NIM : 41405120072
Jurusan : Teknik Elektro Fakultas : Teknologi Industri
Judul : MODIFIKASI SISTEM KONTROL MESIN
COMPRESSOR SCREW MENGGUNAKAN PLC OMRON DI PT. GAJAH TUNGGAL TBK.
Jakarta, Desember 2008 Menyetujui,
Pembimbing Koordinator Tugas Akhir
( Ir. Budi Yanto Husodo, MSc. ) ( Ir. Yudhi Gunardi, MT. )
Mengetahui,
Ketua Jurusan Teknik Elektro
( Ir. Budi Yanto Husodo, M.Sc. )
sangat penting bagi kelangsungan hidup manusia. Begitu pula penerapan udara pada dunia industri, pemanfaatan udara banyak sekali ragamnya contoh kesil mulai dari pengisian udara ke dalam ban sampai pemanfaatan udara didalam sistem pneumatic.
Udara yang dipakai dalam dunia teknologi bukan tanpa proses, karena udara yang dibutuhkan adalah udara dalam kondisi bertekanan. Mesin penghasil udara tekan dinamakan kompresor yang akan mengambil udara dari atmosfir ( luar ) dengan cara diisap kedalam kompresor, kemudian ditempung kedalam tanki penampungan. Mesin kompresor sendiri untuk saat ini digolongkan menjadi beberapa jenis salah satunya berjenis sekrup ( screw ).
Mesin kompresor screw yang ada di PT. Gajah Tunggal Tbk mempunyai sistem kontrol konvensional yaitu pemanfaatan banyak relay sebagai prosesor dari sistem kontrol tersebut, disamping kelemahan dari sistem ini yaitu dengan tidak ditunjang dengan buku panduan dari sistem kontrol sehingga memakan waktu yang cukup lama didalam menangani permasalahan yang terjadi.
Pada tulisan ini penulis mencoba untuk memodifikasi sistem kontrol yang ada dengan yang baru dengan pemanfaatan PLC sebagai prosesor dari sistem kontrol dengan tujuan mempersingkat waktu perbaikan dan mempermudah perbaikan disaat terjadi masalah.
rahmat dan karunia-Nya yang selalu dilimpahkan kepada semua makhluk ciptaan- Nya. Shalawat serta salam tercurah kepada Nabi Muhammad SAW, nabi pembawa rahmat untuk alam semesta, bagi keluarga, sahabat serta orang-orang yang mengikutinya dengan istiqomah sampai akhir zaman.
Dengan segala nikmat-Nya, sehingga penulis dapat menyelesaikan Tugas Akhir ini. Tugas Akhir ini penulis beri judul: “Modifikasi Sistem Kontrol Mesin Compressor Screw Menggunakan PLC OMRON Di PT Gajah Tunggal Tbk.”. Dengan selesainya penulisan ini, penulis harapkan dapat bermanfaat, khususnya bagi penulis dan umumnya bagi pembaca yang budiman. Tak lupa penulis ucapkan terima kasih sedalam-dalamnya kepada :
1. Kedua orang tua, saudara-saudaraku dan para sahabat yang telah memberikan dukungan secara moral dan material.
2. Rekan-rekan dari Departemen Joint Maintenance Utility PT Gajah Tunggal Tbk.,baik mekanik maupun elektrik .
3. Bapak Ir.Budi Yanto Husodo MSc, selaku Ketua Jurusan Teknik Elektro Pksm Universitas Mercubuana
4. Bapak Ir. Yudhi Gunardi, MT,selaku Koordinator Tugas akhir Jurusan Teknik Elektro Pksm Universitas Mercubuana.
5. Kepada semua pihak yang tidak mampu saya sebutkan semuanya disini.
sehingga banyak kekurangan dalam Tugas Akhir ini, dan untuk itu penulis mohon maaf dari pembaca yang budiman. Dan penulis menunggu saran serta kritik yang membangun untuk kesempurnaan Tugas Akhir ini.
Jakarta, Desember 2008
Penulis
HALAMAN JUDUL LEMBAR PERNYATAAN LEMBAR PENGESAHAN ABSTRAK
KATA PENGANTAR... i
DAFTAR ISI... iii
DAFTAR GAMBAR... vii
DAFTAR TABEL ... x
BAB I PENDAHULUAN... 1
1.1 Latar Belakang ... 1
1.2 Tujuan ... 2
1.3 Batasan Masalah ... 3
1.4 Metode Penyelesaian Masalah ... 3
1.5 Sistematika Penulisan ... 4
BAB II LANDASAN TEORI... 6
2.1 Umum... 6
2.2 Pengetahuan Dasar Kompresor ... 6
2.2.1 Klasifikasi Kompresor ... 9
2.2.1.1 Kompresor Displacement Jenis Bolak - Balik... 9
2.2.1.2.b Kompresor Sekrup ( Screw ).... 12
2.2.1.3 Kompresor Turbo ( Centrifugal ) ... 14
2.2.2 Penggerak Kompresor... 15
2.2.2.1 Motor Listrik ... 16
2.2.2.2 Motor Bakar Torak... 16
2.2.3 Transmisi Daya Poros Kompresor ... 17
2.2.3.1 Sabuk – V ... 17
2.2.3.2 Kopling Tetap ... 17
2.2.3.3 Rotor Terpadu ( Direct Rotor )... 18
2.2.3.4 Kopling Gesek... 18
2.3 Programmable Logic Control ( PLC )... 18
2.3.1 Bagian – bagian PLC ... 22
2.3.1.1 Input / Output ... 22
2.3.1.2 Control Processing Unit ( CPU )... 24
2.3.1.2.a Prosesor ... 26
2.3.1.2.b Memori... 28
2.3.1.2.c Power Supply ... 28
2.3.2 Instruksi Pemrograman ... 31
2.3.3 Instruksi Dasar ... 32
2.3.4 Ladder Diagram dan Mnemonic Code... 33
2.3.8 Kombinasi Logika AND, AND NOT, OR dan OR
NOT ... 39
2.3.9 OUT dan OUT NOT ... 40
2.3.10 END ... 41
2.3.11 AND LOAD ... 42
2.3.12 OR LOAD ... 43
2.3.13 Timer ... 44
2.4 Pengaman ... 45
2.4.1 Molded Case Circuit Breaker ( MCCB )... 45
2.4.2 Miniatur Circuit Breaker ( MCB ) ... 47
2.4.3 Thermal Overload Relay ... 47
2.4.4 Ampere Meter ... 48
BAB III SISTEM KONTROL KOMPRESOR ... 50
3.1 Rangkaian Daya ... 50
3.2 Loading dan Unloading ... 53
3.3 Sistem Kontrol Lama ... 55
3.3.1 Kelemahan – kelemahan ... 55
3.3.2 Sistem Pengaman Pada Sistem Kontrol Lama ... 56
3.4 Sistem Kontrol Baru ... 61
3.4.1 Deskripsi Kerja ... 61
3.4.3.2 Power Supply ... 64
3.4.3.3 Thermal Overload Relay ... 65
3.4.3.4 Ampere Meter ... 65
3.4.3.5 Komponen Kontrol Pengaman Tekanan Dan Temperaut Oli ... 66
3.4.3.6 Komponen Kontrol Pengaman Aliran Air . 68 3.4.3.7 Engine Hour ... 69
3.4.3.8 Lampu Indikator... 70
3.4.3.9 Saklar Pilih ... 71
3.5 Desain Sistem Kontrol Baru... 71
3.5.1 Pengalamatan Input – Output PLC ... 73
3.5.2 Langkah Pembuatan Program Pada PLC ... 75
BAB IV PENGUJIAN DAN ANALISA SISTEM... 83
4.1 Pengujian Rancangan ... 83
4.2 Analisa ... 85
BAB V PENUTUP ... 88
5.1 Kesimpulan ... 88
5.2 Saran ... 88 DAFTAR PUSTAKA
LAMPIRAN
2. Gambar 2.2 Contoh Alat Dengan Prinsip Kerja Sama Dengan
Kompresor... 8
3. Gambar 2.3 Unit Kompresor... 9
4. Gambar 2.4 Ilustrasi Pemampatan Udara Pada Kompresor Putar ... 10
5. Gambar 2.5 Ilustrasi Putaran Roda Gigi ... 12
6. Gambar 2.6 Azas Pemampatan Udara Pada Kompresor Screw... 13
7. Gambar 2.7 ( a ) Konstruksi Kompresor Screw... 14
( b ) Rotor Kompresor Screw ... 14
8. Gambar 2.8 Konstruksi Kompresor Turbo ( Centrifugal )... 15
9. Gambar 2.9 Blok Diagram Programmable Logic Control ... 22
10. Gambar 2.10 Input / Output Interface ... 24
11. Gambar 2.11 CPU Unit PLC Omron Sysmax C200HX ... 26
12. Gambar 2.12 Blok Diagram Prosesor ... 27
13. Gambar 2.13 ( a ) Power Supply PLC Jenis Rack ... 29
( b ) Power Supply PLC Jenis Fixed ... 30
14. Gambar 2.14 ( a ) Penggunaan PC Untuk Menulis Program Pada PLC . 32 ( b ) Programmable Console ... 32
15. Gambar 2.15 Ladder Diagram PLC ... 34
16. Gambar 2.16 Kondisi Normally Open Dan Normally Close ... 35
17. Gambar 2.17 Penggunaan Instruksi Logika LOAD dan LOAD NOT.... 37
Dalam Suatu Ladder Diagram... 38
20. Gambar 2.20 Kombinasi Instruksi Logika AND, OR dan AND NOT ... 39
21. Gambar 2.21 Instruksi Logika OUT ... 40
22. Gambar 2.22 Instruksi Logika OUT NOT ... 41
23. Gambar 2.23 Instruksi Logika END ... 42
24. Gambar 2.24 Instruksi Logika AND LOAD... 42
25. Gambar 2.25 Instruksi Logika OR LOAD... 43
26. Gambar 2.26 Instruksi Logika Timer... 44
27. Gambar 2.27 Molded Case Circuit Breaker ( MCCB )... 46
28. Gambar 2.28 Miniatur Circuit Breaker ( MCB )... 47
29. Gambar 2.29 Thermal Overload Relay ( TOR ) ... 48
30. Gambar 2.30 Ampere Meter ... 49
31. Gambar 3.1 Flowchart Rangkaian Daya Sistem Kontrol Lama... 52
32. Gambar 3.2 Throttle Isap ... 54
33. Gambar 3.3 Blok Diagram Sistem Kontrol Lama... 55
34. Gambar 3.4 Rangkaian Kontrol Sistem Lama ... 56
35. Gambar 3.5 Karakteristik Thermal Overload Relay ... 57
36. Gambar 3.6 Komponen – komponen Pada Motor ... 59
37. Gambar 3.7 Blok Diagram Sistem Kontrol Baru ... 62
38. Gambar 3.8 Rangkaian Kontrol Sistem Baru... 62
42. Gambar 3.12 ( a ) TCU ... 68
( b ) PT 100 ... 68
43. Gambar 3.13 Flow Switch ... 69
44. Gambar 3.14 Engine Hour ... 70
45. Gambar 3.15 Lampu Indikator... 70
46. Gambar 3.16 Saklar Pilih ... 71
47. Gambar 3.17 Langkah Mengaktifkan Driver PLC... 76
48. Gambar 3.18 Driver Aktif ... 77
49. Gambar 3.19 Langkah Awal Memulai Pembuatan Program ... 77
50. Gambar 3.20 Combo Box Change PLC... 78
51. Gambar 3.21 Work Sheet... 79
52. Gambar 3.22 Langkah Mengganti Tulisan Program Ke Dalam Mnemonic Code ... 79
53. Gambar 3.23 Work Online... 81
54. Gambar 3.24 Pemilihan Kondisi Kerja PLC... 81
55. Gambar 3.25 Transfer Data Program Dari PC Ke PLC ... 82
56. Gambar 4.1 Grafik Perbandingan Waktu Perbaikan... 85
2. Tabel 2.2 PLC Memori Map ... 32
3. Tabel 2.3 Mnemonic Code... 36
4. Tabel 2.4 Mnemonic Code Instruksi LOAD Dan LOAD NOT... 37
5. Tabel 2.5 Mnemonic Code Instruksi AND Dan AND NOT... 38
6. Tabel 2.6 Mnemonic Code Instruksi OR Dan OR NOT... 39
7. Tabel 2.7 Mnemonic Code Kombinasi Instruksi AND, OR Dan AND NOT... 40
8. Tabel 2.8 Mnemonic Code Instruksi Logika OUT ... 41
9. Tabel 2.9 Mnemonic Code Instruksi Logika OUT NOT ... 41
10. Tabel 2.10 Mnemonic Code Instruksi END... 42
11. Tabel 2.11 Mnemonic Code Instruksi AND LOAD ... 43
12. Tabel 2.12 Mnemonic Code Instruksi OR LOAD ... 44
13. Tabel 2.13 Mnemonic Code Instruksi Timer ... 45
14. Tabel 3.1 Pengalamatan Input PLC ... 73
15. Tabel 3.2 Pengalamatan Output PLC... 74
16. Tabel 4.1 Permasalahan dan Penyebab Terjadinya... 84
17. Tabel 4.2 Perbandingan Waktu Perbaikan Antara Sistem Kontrol Lama dan Baru ... 84
BAB I PENDAHULUAN
1.1 Latar Belakang
Proses pembuatan ban motor atau mobil melewati banyak tahapan mulai dari mesin banbury, open mill, ekstruder, bead gromed, bias cutting, building, venting dan curing. Setiap tahapan proses tersebut mempunyai karakteristik proses dan hasil yang berbeda-beda.
Setiap hasil dari tahapan proses tersebut sangat mempengaruhi kualitas akhir dari suatu ban mobil ataupun motor. Semua tahapan produksi tersebut memerlukan dukungan berbagai macam energi seperti steam, angin, daya listrik, dsb. Yang kesemua energi tersebut disupply oleh departemen pendukung yaitu UTILITY.
Mesin compressor didalam departemen utility berperan sangat vital demi tersedianya angin yang sangat dibutuhkan didalam setiap proses produksi. Mesin compressor yang digunakan di PT. GAJAH TUNGGAL Tbk memiliki dua jenis yaitu tipe screw compressor dan turbo compressor, Mesin compressor yang
masih sangat dibutuhkan untuk menunjang tersedianya kebutuhan angin di PT GAJAH TUNGGAL Tbk, dengan status mesin lama maka dari segi sistem baik itu prinsip kerja, sistem kontrol ataupun performa mesin masih tertinggal jauh dari tipe turbo. Apalagi ditambah dengan rumitnya rangkaian konvensional yang tidak disertai buku panduan jika terjadinya “troubleshooting” sehingga membutuhkan waktu yang cukup lama untuk memperbaikinya, dengan berbagai alasan tersebutlah yang menelatarbelakangi penulisan ini.
Latar belakang penulisan tugas akhir ini juga untuk memperkenalkan kepada para pembaca mengenai penggunaan Programmable Logic Control atau yang lebih dikenal dengan PLC yang mendukung jenis tipe pemrograman Ladder Diagram. Sehingga jika pada rangkaian konvensional mesin kompresor tersebut membutuhkan begitu banyak relay maka dengan menggunakan PLC hal itu dapat dikurangi. Selain itu juga untuk mengurangi tingkat tingginya biaya ( cost down ) apabila mendatangkan sebuah mesin kompresor baru.
1.2 Tujuan
Tujuan Penulisan Tugas akhir ini adalah :
¾ Mempersingkat waktu perbaikan.
¾ Mempermudah perbaikan saat terjadinya masalah.
¾ Penerapan sistem kontrol berbasis PLC.
Agar pembahasan tugas akhir ini menjadi lebih terarah, maka perlu adanya pembatasan masalah. Penulis memfokuskan pada hal-hal yang meliputi:
a. Penentuan spesifikasi komponen listrik yang digunakan dalam perancangan.
b. Pengalamatan Input dan Output (I/O), serta cara pengawatan peralatan pada PLC OMRON.
c. Langkah pembuatan program pada PC.
d. Sistem Kontrol pada mesin kompresor screw di PT Gajah Tunggal Tbk.
1.4 Metode Penyelesaian Masalah
Metode yang digunakan dalam penyelesaian penulisan tugas akhir ini adalah sebagai berikut :
a. Metode kajian pustaka.
Penulis menggunakan buku-buku literature, majalah, diktat-diktat kuliah serta sumber-sumber pendukung lainnya dalam mencari landasan teori yang berhubungan dengan pokok pembahasan Tugas akhir ini.
b. Metode Eksperimen
Penulis melakukan serangkaian percobaan untuk mengetahui hasil dari rancangan yang dibuat, sehingga dapat diketahui secara pasti apakah alat ini bisa bekerja sesuai fungsinya atau tidak.
Untuk mendapatkan gambaran secara umum tentang pokok pembahasan dalam laporan tugas akhir ini, maka penulis membagi pokok pembahasan tersebut dalam beberapa bab yang secara garis besarnya adalah sebagai berikut :
BAB I PENDAHULUAN
Pada bab ini akan diuraikan tentang latar belakang, maksud dan tujuan, batasan masalah, metode serta sistematika penulisan.
BAB II LANDASAN TEORI
Pada bab ini akan dibahas tentang teori dasar dan teori pendukung, yang menunjang dalam penulisan tugas akhir ini, antara lain mengenai penulisan prinsip kerja mesin kompresor screw, pengenalan PLC, pengenalan pengaman, pengenalan peralatan input dan output.
BAB III PERANCANGAN
Pada bab ini akan membahas tentang perbandingan sistem kontrol lama dengan sistem kontrol kompresor yang baru, penjelasan mengenai prinsip kerja mesin kompresor screw serta langkah-langkah perancangan, yaitu dimulai dari penentuan spesifikasi komponen, wiring / pengawatan rangkaian daya &
rangkaian kontrol PLC, membuat program PLC.
BAB IV PENGUJIAN RANCANGAN DAN ANALISA DATA HASIL PENGUJIAN
Pada bab ini akan membahas tentang perbandingan analisa antara sistem kontrol lama dengan sistem kontrol baru dan pengujian sistem kontrol baru.
Pada bab ini berisi tentang kesimpulan dan saran mengenai rancangan kontrol mesin kompresor screw yang dibuat oleh penulis.
BAB II
LANDASAN TEORI
2.1 U M U M
Pada bab ini akan dijelaskan mengenai teori dasar yang melandasi permasalahan dan penyelesaiannya yang diangkat didalam tugas akhir ini. Teori dasar yang dijelaskan meliputi prinsip dasar kerja kompresor, klasifikasi kompresor, penggerak kompresor, transmisi daya poros kompresor, Programable Logic Control ( PLC).
2.2 PENGETAHUAN DASAR KOMPRESOR
Compressor atau kompresor merupakan suatu mesin yang digunakan untuk memampatkan udara atau gas yang diisap dari atmosfir atau udara bebas. Bila suatu gas atau udara didalam suatu ruangan tertutup diperkecil volumenya maka gas atau udara tersebut akan mengalami kompresi, kompresor yang bekerja
berdasarkan prinsip kerja tersebut disebut dengan kompresor jenis perpindahan ( displacement ), yang secara prinsip dilukiskan seperti pada gambar 2.1
Gambar 2.1 Prinsip Kerja Kompresor Displacement.
Pada gambar 2.1 tersebut torak bergerak secara bolak-balik didalam sebuah silinder dan berfungsi sebagai pengisap, penekan dan pendorong gas untuk keluar dari silinder secara berulang-ulang. Cincin torak yang dipasang pada torak berfungsi sebagai perapat dimana didalam kondisi atau proses kerja udara atau gas yang ditekan tidak boleh keluar atau bocor melalui celah antara dinding torak dan dinding silinder yang saling bergesekan.
Didalam kehidupan sehari-hari kita dapat jumpai contoh nyata dari kompresor jenis displacement yaitu pada pompa ban sepeda ( sepeti pada gambar 2.2 ), dimana pada alat ini bila kita menarik pegangan ke atas maka torak akan bergerak ke atas dan tekanan didalam silinder bawah torak akan menjadi negatif ( lebih kecil dari tekanan atmosfir atau udara luar ) sehingga udara akan masuk
melalui celah katup isap yang terbuat dari kulit dan dipasang langsung pada torak juga berfungsi sebagai perapat torak.
Gambar 2.2 Contoh Alat Dengan Prinsip Kerja Sama Dengan Kompresor.
Apabila torak ditekan ke bawah, volume udara yang terkurung di bawah torak akan mengecil sehingga tekanan udara akan naik dan katup isap akan tertutup yang ditandai dengan merapatnya celah anatara torak dengan dinding silinder, semakin torak di tekan maka semakin kecil volume dan semakin besar tekanan didalam silinder yang akan melebihi tekanan didalam ban sehingga udara akan terdorong masuk ke dalam ban melalui pentil yang berfungsi sebagai katup keluar. Kompresor jenis perpindahan ( displacement ) terbagi menjadi dua jenis berdasarkan pendorong yang digunakan di dalam silinder, yaitu kompresor jenis bolak-balik dan kompresor jenis putar ( rotary ).
2.2.1 Klasifikasi Kompresor
Secara umum kompresor terbagi berdasarkan pada volume dan tekanan yang dihasilkan, sebutan kompresor dipakai untuk bertekanan tinggi, blower ( peniup ) untuk yang bertekanan agak rendah, sedang fan ( kipas ) untuk yang bertekanan sangat rendah. Namun biasanya kompresor terbagi berdasarkan cara pemampatannya yaitu kompresor jenis turbo dan kompresor jenis perpindahan.
2.2.1.1 Kompresor Displacement Jenis Bolak-Balik
Pada umumnya setiap kompresor menggunakan motor sebagai prime mover atau penggerak utama, motor tersebut dihubungkan dengan poros engkol dimana katup isap dan katup keluar dipasang pada kepala silinder. Tangki udara yang digunakan pada kompresor jenis ini berfungsi sebagai penyimpan energi dan dapat disamakan dengan ban pada implementasi pompa ban. Gambar 2.3 merupakan gambaran sebuah unit kompresor displacement jenis bolak-balik.
Gambar 2.3 Unit Kompresor.
Kekurangan yang terdapat pada kompresor jenis ini yaitu tidak dapat dioperasikan pada putaran tinggi, hal ini dikarenakan getaran yang timbul dari gaya inersia saat kompresor tersebut bekerja.
2.2.1.2 Kompresor Displacement Jenis Putar ( Rotary ) 2.2.1.2.a Kompresor Sudu Luncur
Kompresor jenis putar ini terbagi menjadi dua, yaitu kompresor jenis sudu luncur dan kompresor jenis sekrup ( screw ). Kompresor sudu luncur memiliki sebuah rotor bersudu dan berputar di dalam stator berbentuk silinder, rotor dipasang secara eksentrik ( tidak bersumbu ) terhadap silinder. Sudu – sudu dipasang pada alur – alur di sekeliling rotor dan ditekan ke dinding silinder oleh pegas di dalam alur. Jika rotor berputar maka sudu akan ikut berputar sambil meluncur di permukaan dalam dinding silinder.
Gambar 2.4 Ilustrasi Pemampatan Udara Pada Kompresor Putar.
Gambar 2.4 mengilustrasikan bagaimana cara pemampatan gas atau udara pada kompresor putar, pada gambar tersebut bentuk permukaan rotor yang seharusnya berbentuk lingkaran disederhanakan menjadi lurus dan dilengkapi dengan sudu – sudu ( baling – baling ) yang akan menekan permukaan silinder karena tekanan di dalalm alur rotor. Dinding dalam silinder disederhanakan pula menjadi lurus dan miring sehingga ruang antara rotor dan silinder menyempit ke arah kanan.
Ketika rotor di gerakkan ke kanan, udara atau gas yang ada diantara dinding rotor dan silinder dan yang di kurung di dalam ruang ( diantara dua sudu, misal di ruang 1 ) akan terbawa ke kanan dimana ruang ankan semakin mengecil ( ke arah 2, 3, dst ). Sehingga udara atau gas akan diisap dari kiri ke kanan sambil di mampatkan lalu dikeluarkan di sebelah kanan dengan tekanan yang lebih tinggi, sebaliknya jika digerakkan ke sebelah kiri maka gas atau udara akan diisap dari kanan ke kiri sambil dikembangkan lalu dikeluarkan.
Kompresor sudu luncur menghasilkan getaran yang relatif kecil bila dibandingkan dengan kompresor torak dan kompresor ini juga tidak memiliki katup seperti pada kompresor torak, namun kerugian dari kompresor sudu luncur terletak pada masalah kerugian gesek, keausan dan kebocoran yang besar pada sisi – sisi sudu, sedangkan jika dilihat dari performansinya kompresor sudu luncur akan menjadi buruk jika perbandingan tekanan kerja tidak sesuai dengan nilai atau harga optimumnya artinya tekanan yang dihasilkan dari kompresor tidak sama dengan tekanan di pipa keluar.
2.2.1.2.b Kompresor Sekrup ( Screw )
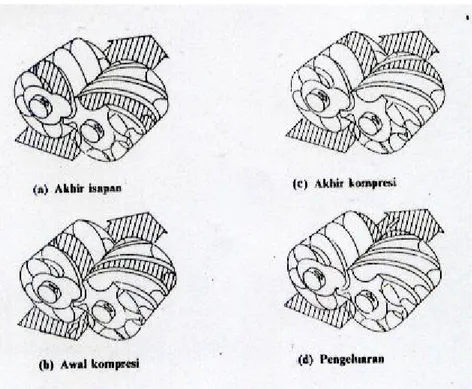
Kompresor putar jenis sekrup memiliki sepasang rotor berbentuk sekrup yang secara serempak berputar ke arah yang berlawanan dan saling mengait seperti roda gigi. Putaran serempak ini dapat berlangsung karena kaitan gigi rotor itu sendiri atau dengan perantaraan sepasang roda gigi penyerempak putaran yang diperlihatkan pada gambar 2.5.
Gambar 2.5 Ilustrasi Putaran Roda Gigi.
Pada gambar tersebut digambarkan aliran udara yang berada di dalam silinder seolah – olah di dorong oleh rotor bersudu dimana semua tinggi sudu adalah tetap. Sedangkan azas pemampatan gas atau udara dalam kompresor sekrup diperlihatkan dalam bagan pada gambar 2.6, dimana gas atau udara yang berada dalam ruang sudu tersebut belum mengalami kompresi sewaktu dari kiri ke kanan namun setelah gas atau udara di keluarkan ke sisi keluar yang memiliki tekanan lebih barulah terjadi kompresi.
Gambar 2.6 Azas Pemampatan Udara Pada Kompresor Screw.
Kerugian pada kompresor jenis sekrup terletak pada performansinya yang akan menurun cepat bila di operasikan pada perbandingan tekanan yang tinggi, selain itu karena proses kompresi tidak dilakukan di dalam silinder maka kompresor ini akan menghasilkan pulsasi dan bunyi yang besar. Konstruksi dan rotor kompresor screw diperlihatkan pada gambar berikut.
( a )
( b )
Gambar 2.7 ( a ) Konstruksi Kompresor Screw.
( b ) Rotor Kompresosr Screw.
2.2.1.3 Kompresor Turbo ( Centrifugal )
Prinsip kerja kompresor jenis turbo yaitu menaikkan tekanan dan kecepatan gas atau udara didalam silinder dengan gaya sentrifugal yang ditimbulkan oleh impeller, atau dengan gaya angkat ( lift ) yang ditimbulkan oleh sudu. Impeller
yang digunakan pada kompresor turbo digerakan oleh motor listrik dan dihubungkan langsung pada rotor motor tersebut, gambar berikut memperlihatkan konstruksi dari kompresor turbo.
Gambar 2.8 Konstruksi Kompresor Turbo ( Centrifugal ).
2.2.2 Penggerak Kompresor
Jika pada pompa ban, torak digerakkan secara manual oleh pergerakan tuas yang mengikuti pergerakan tangan, namun pada kompresor umumnya menggunakan motor sebagai alat penggerak dari torak maupun sudu. Motor yang digunakan biasanya beragam dan memiliki konstruksi yang disesuaikan dengan kompresor itu sendiri, dalam pengaplikasiannya kompresor menggunakan dua jenis motor yaitu motor listrik dan motor bakar torak ( motor berbahan bakar ).
2.2.2.1 Motor Listrik
Motor listrik dapat dikelompokkan secara kasar atas motor induksi ( motor asinkron ) dan motor sinkron. Arus awal suatu motor induksi sangatlah besar namun karena harga yang relatif murah dan pemeliharaannya yang mudah motor jenis ini banyak sekali diimplementasikan dibanding motor sinkron meskipun pada motor sinkron memiliki factor daya dan efisiensi yang tinggi.
Berdasarkan jenis rotor yang digunakan motor induksi terbagi menjadi dua jenis, yaitu motor rotor sangkar bajing ( squirrel cage ) dan motor rotor lilit ( wound rotor ), motor listrik dapat distart dengan berbagai cara. Pada tabel 2.1 diperlihatkan karakteristik motor listrik yang meliputi momen awal, arus awal ( starting ), cara start dan harga.
2.2.2.2 Motor Bakar Torak
Motor bakar torak biasanya digunakan sebagai penggerak kompresor bila tidak tersedia sumber listrik di tempat pemasangannya atau bila kompresor tersebut merupakan kompresor portable. Untuk motor bakar torak berbahan bakar bensin dapat dipakai pada kompresor berdaya kecil sampai 5,5 kW dan untuk penggunaan daya yang lebih besar ( diatas 5,5 kW ) dapat digunakan motor berbahan bakar diesel.
2.2.3 Transmisi Daya Poros Kompresor
Untuk mentransmisikan ( mengirim ) daya dari rotor pada motor ke poros kompresor ada beberapa cara yaitu jika penggerak menggunakan motor listrik maka transmisinya dapat menggunakan sabuk-V, kopling tetap, dan rotor terpadu.
Untuk penggerak dengan motor bakar torak maka dapat menggunakan transmisi berupa sabuk-V, kopling tetap atau kopling gesek.
2.2.3.1 Sabuk-V
Keuntungan menggunakan cara transmisi ini adalah pada putaran kompresor yang dapat dipilih bebas sehingga dapat dipakai motor putaran tinggi. Dan kerugian bila mengaplikasikan sistem transmisi ini ialah dapat menimbulkan kerugian daya yang disebabkan oleh slip antaraq puli dan sabuk, serta kebutuhan ruanganyang lebih besar untuk pemasangan. Namun sistem transmisi ini biasanya digunakan untuk kompresor berukuran kecil dengan daya kurang dari 75 kW.
2.2.3.2 Kopling Tetap
Transmisi dengan kopling tetap memberikan efisiensi keseluruhan yang tinggiseerta pemeliharaan yang mudah. Tapi kerugian dari sistem transmisi ini yaitu memerlukan motor dengan putaran rendah, dan biasanya motor dengan putaran rendah memiliki harga yang mahal, karena itu cara ini hanya sesuai diterapkan pada kompresor berdaya antara 150 sampai 450 kW.
2.2.3.3 Rotor Terpadu ( Direct Rotor )
Transmisi ini menggunakan poros engkol kompresor menjadi satu dengan poros motor, sehingga ukuran mesin menjadi lebih ringkas dan tidak memerlukan banyak ruang. Pemeliharaan transmisi ini lebih mudah namun memerlukan jenis motor yang didesain atau dibuat secara khusus.
2.2.3.4 Kopling Gesek
Cara ini dipakai untuk menggerakkan kompresor kecil dengan motor bakar torak, dimana motor dapat distart tanpa beban dengan membuka hubungan kopling. Namun untuk jenis kompresor dengan fluktuasi momen puntir yang besar diperlukan kopling yang dapat meneruskan momen puntir yang besar pula.
2.3 PROGRAMMABLE LOGIC CONTROL ( PLC )
Programmable Logic Control atau yang biasa disebut PLC merupakan suatu alat yang beroperasi secara digital dengan menggunakan programmable memori untuk menyimpan berbagai macam instruksi fungsi spesifik seperti logika, timing, sekuensial, algoritma dan counting untuk mengendalikan secara analog ataupun digital input atau output sebagai tipe mesin. Keberadaan PLC merupakan tuntutan akan kebutuhan suatu sistem kontrol yang murah, dapat digunakan untuk segala kondisi dan mudah dalam pengoperasiannya, PLC didesain untuk menggantikan hardware relay dan timer logic dengan menggunakan sistem kontrol berdasarkan CPU ( Central Processing Unit ) yang menggunakan perangkat keras dan memori
untuk mengendalikan proses, didalam program PLC sendiri sudah terdapat fungsi internal seperti timer, counter dan shift register.
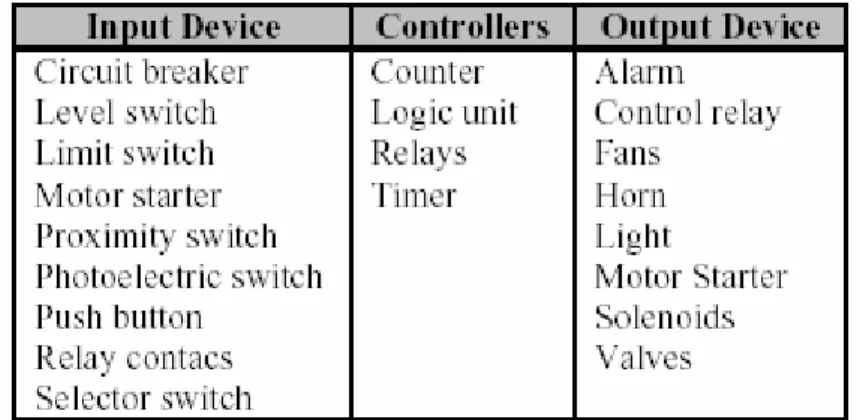
CPU yang terdapat pada PLC berfungsi sebagai pusat hubungan dari setiap blok diagram ( input device, controller, output device ) untuk menerima sinyal masukkan dari peralatan input yang dinamakan Input Device yang masuk ke PLC, sinyal input yang masuk ke PLC tersebut dinamakan input poin, dimana input poin ini ditempatkan dalam lokasi memori yang telah ditentukan statusnya on atau off. Lokasi memori ini biasanya disebut dengan bit, CPU dalam suatu siklus proses normal akan memantau status keadaan dari input poin dan menjalankan on atau off sesuai dengan input bitnya. Demikian pula dengan output bit dalam memori dimana output poin pada unit yang telah ditentukan mengirim sinyal output kepada output device. Output bit akan on untuk mengirimkan sebuah sinyal ke peralatan output melalui output poin dan CPU secara periodik menjalankan output poin on atau off sesuai dengan status dari output bitnya.
Penggunaan PLC dan berbagai macam komponen peralatan I / O device yang digunakan pada suatu rangkaian untuk mengontrol sistem eksternal dinamakan dengan sistem kontrol. Pada tabel 2.1 diperlihatkan sensor atau komponen – komponen yang termasuk de dalam input device, controller dan output device.
Tabel 2.1 Peralatan Iput, Output, serta Controller dari PLC.
Dalam pengoperasiannya biasanya pengguna atau User terlebih dahulu menentukan program yang akan dieksekusi atau dijalankan oleh PLC, program ini biasanya berbentuk diagram tangga atau sering disebut dengan Ladder Diagram.
Penggunaan PLC banyak diaplikasikan pada sistem kontrol berbagai proses industri, misalnya pada proses pengepakan, penanganan bahan, perakitan otomatis dan sebagainya. Dengan kata lain, hampir semua aplikasi yang memerlukan kontrol listrik atau elektronik membutuhkan PLC.
Bila ditinjau dari segi fungsi PLC, maka kita dapat melihat beberapa kelemahan dari penggunaan sistem kontrol konvensional, antara lain :
Î Perlu kerja keras saat melakukan proses pengkabelan
Î Terdapat kesulitan saat dilakukan penggantian dan, atau perubahan Î Kesulitan saat dilakukan pelacakan kesalahan ( Troubleshooting )
Î Saat terjadi masalah biasanya memakan waktu yang lama dan tidak menentu
Sedangkan dengan penggunaan sistem kontrol menggunakan PLC, kita
Î Jumlah kabel yang dibutuhkan dapat dieliminir atau dikurangi hingga sekitar + 80 %
Î PLC mengkonsumsi daya yang relatif lebih rendah dibandingkan dengan sistem kontrol menggunakan relay ( konvensional )
Î Fungsi diagnostik pada sebuah kontroler PLC memungkinkan pendeteksian kesalahan yang mudah dan cepat
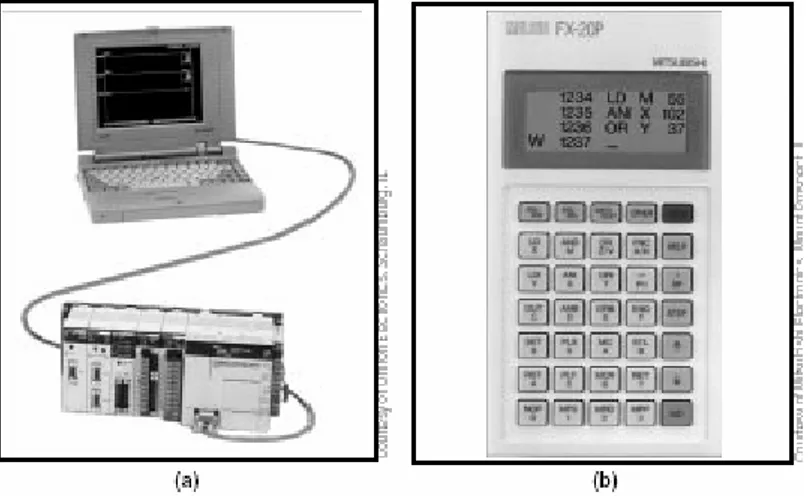
Î Perubahan pada sebuah aplikasi atau proses dapat dilakukan dengan mudah ( hanya dengan merubah suatu program ), melalui sebuah alat pemrogram khusus ( mini programmer unit ) atau komputer PC, seperti pada gambar 2.14
Î Tidak membutuhkan spare part yang banyak
Î Lebih murah bila dibandingkan menggunakan sistem kontrol konvensional, khususnya didalam penggunaan instrumen I / O yang cukup banyak dan fungsi operasional memiliki kompleksitas yang tinggi Î Ketahanan PLC jauh lebih baik bila dibandingkan dengan relay auto-
mekanik
Î Kemampuan PLC beroperasi pada lingkungan yang keras
Î PLC tahan terhadap noise dan memiliki fluktuasi temperature yang besar ( 00C – 600C )
Î Konstruksi plug in yang memungkinkan penggantian atau penambahan unit input atau output secara mudah ( khusus untuk PLC berbentuk rack ) Î Bahasa pemrograman yang mudah dipahami
Î Kemudahan pemrograman dan pemrograman ulang
Blok diagram PLC secara umum dapat kita lihat pada gambar 2.9 dan pada gambar 2.14 (a) diperlihatkan pemrograman pada PLC yang dilakukan dengan menggunakan komputer PC sedang pada gambar 2.14 (b) diperlihatkan alat pemrogram PLC yang disebut mini programmer unit.
Gambar 2.9 Blok Diagram Programmable Logic Control.
2.3.1 Bagian - bagian PLC
Sesungguhnya PLC merupakan sistem mikrokontroler yang dirancang khusus untuk industri, artinya separangkat perangkat lunak dan keras yang diadaptasi untuk keperluan aplikasi dalam dunia industri. PLC terbagi ke dalam tiga bagian utama yaitu : bagian input / output ( I / O ), Central Processing Unit ( CPU ), dan bagian perangkat pemrograman ( programming device ).
2.3.1.1 Input / Output
Input / output device atau unit input / output merupakan bagian penghubung mikroelektrik PLC dengan dunia luar, untuk itu diperlukan suatu rangkaian pengkondisian sinyal dan isolasi yang memungkinkan PLC untuk dihubungkan langsung pada actuator proses dan tranduser tanpa memerlukan sirkuit perantara.
Sinyal I / O dari PLC dikonversikan pada I / O unit untuk berbagai keperluan, hal ini merupakan bentuk standar dari berbagai saluran I / O yang diisolasi secara elektris dari proses kontrol menggunakan opto isolator I / O modul.
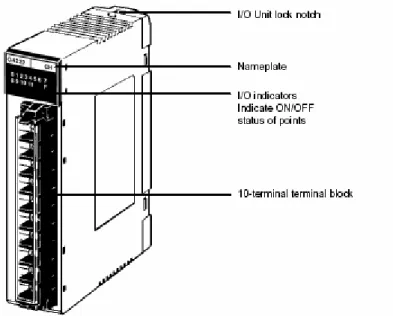
Setiap PLC, I / O poin terletak pada suatu tempat yang semua input dan output dari suatu tipe adalah sama. Ini dikarenakan supply dari pembuat ( maker ) adalah untuk fungsi standar dengan tujuan agar lebih ekonomis, dalam berbagai kasus, unit I / O dibuat untuk memudahkan hubungan proses antara tranduser dengan actuator ke PLC. Berdasarkan tujuan tersebut semua PLC dibuat dengan terminal atau I / O interface yang telah distandardisasi ( seperti ditunjukkan pada gambar 2.10 ), sehingga memudahkan dan menyederhanakan pelepasan serta penggantian I / O card yang mengalami gangguan atau rusak ( error ).
Setiap I / O poin mempunyai suatu alamat ( address ) tersendiri atau nomor saluran yang digunakan selama pembuatan ataupun pengembangan suatu program untuk menentukan pengawasan I / O dalam program tersebut. Indikasi kondisi dari saluran I / O dilakukan dengan bantuan LED yang terdapat pada PLC sehingga pengawasan I / O PLC dalam membangun atau membuat suatu program dapat dengan mudah dikontrol.
Gambar 2.10 Input / Output Interface.
2.3.1.2 Central Processing Unit ( CPU )
Didalam sebuah CPU ditempatkan sebuah prosesor, dimana pada saat operasinya ( PLC ), CPU bertugas untuk mengendalikan dan mengawasi opearsi PLC pada saat mengeksekusi atau menjalankan instruksi yang telah terprogram dalam memorinya ( CPU ). Informasi yang akan dan dari CPU, memori, I / O unit dibawa melalui sebuah bus sistem atau jalur komunikasi internal dibawah kontrol CPU.
Pengaturan kerja CPU sendiri diatur melalui frekuensi clock dari kristal waktu eksternal atau isolator RC ( yang biasanya memiliki range antara 1 – 8 MHz ). Kemampuan frekuensi clock tersebut ditentukan dari mikroprosesor yang digunakan dan arena penggunaannya. Clock menggambarkan kecepatan operasi PLC dan menyediakan pewaktu atau sinkronisasi untuk berbagai elemen sistem.
Secara garis besar CPU terdiri dari tiga komponen utama yaitu :
Î Prosesor Î Sistem memori Î Sistem power supply
Secara garis besar prinsip kerja CPU dapat kita simpulkan ke dalam tiga bagian, yaitu :
Î Membaca : CPU akan membaca atau menerima data dari input device yang terletak di luar sistem PLC melalui input interface
Î Menjalankan : CPU akan menjalankan kontrol program yang telah disimpan pada sistem memori
Î Menulis : CPU akan menambahkan perbaikan – perbaikan data terbaru untuk kondisi dari sebuah output device melalui output interface
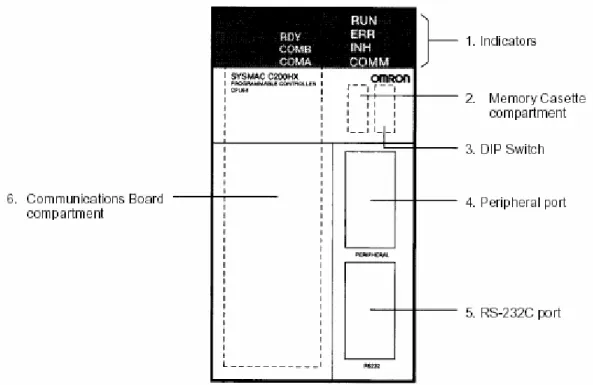
Berikut ini merupakan sebuah gambaran CPU unit dari sebuah PLC :
Gambar 2.11 CPU Unit PLC Omron Sysmax C200HX.
2.3.1.2.a Prosesor
Sistem CPU yang ada pada saat ini umumnya menggunakan mikro, dalam beberapa PLC bertipe besar ada yang menggunakan mikroprosesor tambahan untuk mengontrol penggunaan waktu yang kompleks. Prosesor yang terdapat pada PLC mempunyai fungsi untuk menyimpan dan menjalankan program yang telah disimpan pada sistem memori PLC.
Umumnya prosesor bekerja berdasarkan pada memori yang menyimpan program untuk kondisi I / O terbaru. Kondisi input disimpan didalam input tabel yang merupakan bagian dari memori prosesor, dimana setiap satu modul input dibagian I / O telah ditentukan satu lokasi tersendiri dalam input image tabel
untuk mencatat kondisi akhir dari suatu output, dimana kondisi input dan output adalah beda.
Arah aliran informasi pada CPU ketika akan mengambil instruksi dari memori user program ke dalam CPU adalah sebagai berikut :
Î Mengambil informasi I / O dari image dan data numerik dari variabel data memori
Î Menjalankan instruksi
Î Pembuatan keputusan logic mengenai keadaan yang sebenarnya dari output dan muncul dalam output image tabel
Lokasi yang terdapat pada I / O dari image modul dikenali dengan alamat, masing – masing lokasi memiliki alamat yang berbeda, dan setiap PLC memiliki metode tersendiri didalam menentukan sebuah alamat-alamat.
Bagian memori prosesor hanya digunakan untuk menyimpan instruksi – instruksi user program. Sebelum PLC mulai beraktivitas, user harus memasukkan kode – kode instruksi yang merupakan user program dan cara ini disebut dengan programming.
Gambar 2.12 Blok Diagram Prosesor.
2.3.12.b Memori
Memori merupakan suatu elemen yang berupa IC ( Integral Circuit ), karakter dari memori ini dapat dengan mudah dihapus hanya dengan mematikan catu daya. Memori digolongkan ke dalam beberapa tipe yaitu :
Î RAM ( Random Acces Memory ), merupakan tipe memori yang fleksibel artinya dapat membaca atau menulis data yang digunakan untuk menyimpan suatu program
Î ROM ( Read Only Memory ), merupakan tipe memori yang hanya dapat dibaca data yang terdapat didalamnya, namun tidak dapat ditulisi karena termasuk data non volatile yang tersedia secara permanen
Î EPROM ( Erasable Programmable Only Memory ), merupakan jenis memori yang dapat diprogram secara elektis dan dihapus dengan menggunakan sinar ultraviolet dan termasuk jenis media penyimpan yang permanen untuk ladder program
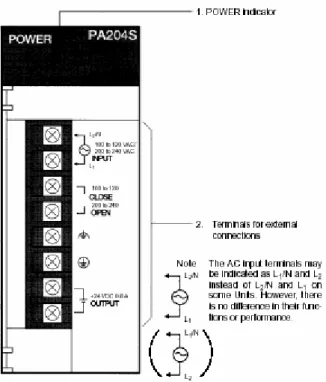
2.3.1.2.c Power Supply
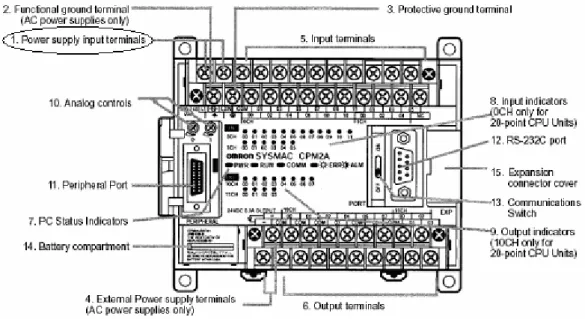
Power supply atau catu daya merupakan suatu unit yang berfungsi khusus untuk memberikan pasokan daya dari suatu sumber ke seluruh komponen PLC ( CPU, Memori, I / O Interface ) baik itu berupa arus bolak – balik ( AC ) ataupun searah ( DC ). Untuk nominal tegangan, biasanya PLC bekerja pada tegangan 24 Vdc atau 220 Vac. Bentuk fisik dari catu daya atau power supply pada setiap PLC berbeda – beda tergantung dari jenis PLC itu sendiri ( bentuk fixed atau rack ).
PLC berjenis rack umumnya memiliki kondisi fisik yang besar sedangkan yang
berjenis fixed umumnya memiliki kondisi fisik yang sedang atau kecil. Berikut gambaran catu daya ( power supply ) untuk PLC jenis rack ( gambar 2.13 ( a ) ) dan fixed ( gambar 2.13 ( b ) ).
Gambar 2.13 ( a ) Power Supply PLC Jenis Rack.
Gambar 2.13 ( b ) Power Supply PLC Jenis Fixed.
Umumnya pengguna harus menentukan besar nilai arus yang diambil dari modul keluaran atau masukkan untuk memastikan catu daya yang bersangkutan menyediakan sejumlah arus yang memang dibutuhkan. Biasanya tipe modul yang berbeda akan menyediakan sejumlah arus listrik yang berbeda.
Catu daya listrik ini biasanya tidak digunakan untuk memberikan catu daya langsung ke dalam masukkan ataupun keluaran, yang artinya masukkan dan keluaran murni merupakan saklar ( baik relai ataupun opto isolator ). Pengguna atau User harus menyediakan catu daya yang terpisah untuk masukkan atau keluaran pada PLC. Dengan demikian maka lingkungan industri dimana PLC tersebut digunakan tidak akan merusak PLC itu sendiri karena memiliki catu daya terpisah dengan masukkan atau keluarannya.
2.3.2 Instruksi Pemrograman
Unruk memudahkan memasukkan program ke dalam sebuah PLC tentukan terlebih dahhulu daftar seluruh peralatan input dan output beserta lokasi I / O bitnya dan penempatan lokasi word dalam penulisan data.
Didalam memprogram suatu PLC, alangkah baiknya bila mengenal atau mengetahui terlebih dahulu tentang organisasi memori yang terdapat didalamnya.
Ilustrasi dari organisasi memori yaitu sebagai peta memori ( memory map ) yang space atau ruangnya terdiri dari kategori user programmable dan data tabel.
User program adalah suatu program Logic Ladder dimana ia dimasukkan dan disimpan yang berupa instruksi – instruksi dalam format Logic Ladder. Setiap instruksi memerlukan satu word didalam memori. Data tabel terbagi ke dalam dua kategori yaitu status data dan numbers atau codes. Status data merupakan informasi on / off yang dipresentasikan sebagai “I” atau “O” , yang disimpan didalam bit location. Sedangkan informasi number atau code dipresentasikan sebagai group bit dari yang dalam byte atau word location. Data tabel dibagi menjadi tiga seksi tergantung menurut jenis informasinya, yaitu input image, timer dan counterstorage. Ilustrai dari memori map dapat dilihat pada tabel 2.2 berikut ini.
Tabel 2.2 PLC Memori Map.
Dari tabel input dan output, maka dapat dilihat bahwa dalam mengerjakan suatu program, prosesor akan membaca semua inputan yang mana proses tersebut dinamakan program scan. Penulisan program dilakukan dalam bentuk ladder diagram dengan menggunakan bantuan PC ( Syswin Software ) atau dengan kode mnemonic dengan menggunakan Programming Concole.
Gambar 2.14 (a) Penggunaan PC Untuk Menulis Program Pada PLC.
(b) Programming Console.
2.3.3 Instruksi Dasar
Instruksi dasar pada PLC biasanya terdiri dari LOAD, LOAD NOT, AND, AND NOT, OR, OR NOT. Dan biasanya penulisan instruksi – instruksi tersebut
didalam bentuk ladder diagram diwakili oleh suatu gambar identitas masing – masing.
( LOAD ) ( LOAD NOT )
( AND ) (AND NOT )
( OR ) ( OR NOT )
2.3.4 Ladder Diagram dan Mnemonic code
Ladder Diagram atau diagram tangga terdiri dari garis vertikal ke bawah yang terletak pada bagian kiri diagram dan memiliki cabang berupa garis horizontal ke kanan. Garis vertikal yang terletak pada bagian kiri biasanya disebut busbar, garis instruksi, garis cabang atau anak tangga.
Garis instruksi tersebut dikondisikan sebagai pusat dari semua instruksi – instruksi ladder diagram yang terdapat di bagian kanan dari tiap – tiap jalur diagram, sedangkan pembacaan logika untuk tiap – tiap rangkaian ditentukan dengan cara bagaimana rangkaian tersebut dijalankan mulai dari kiri ( garis
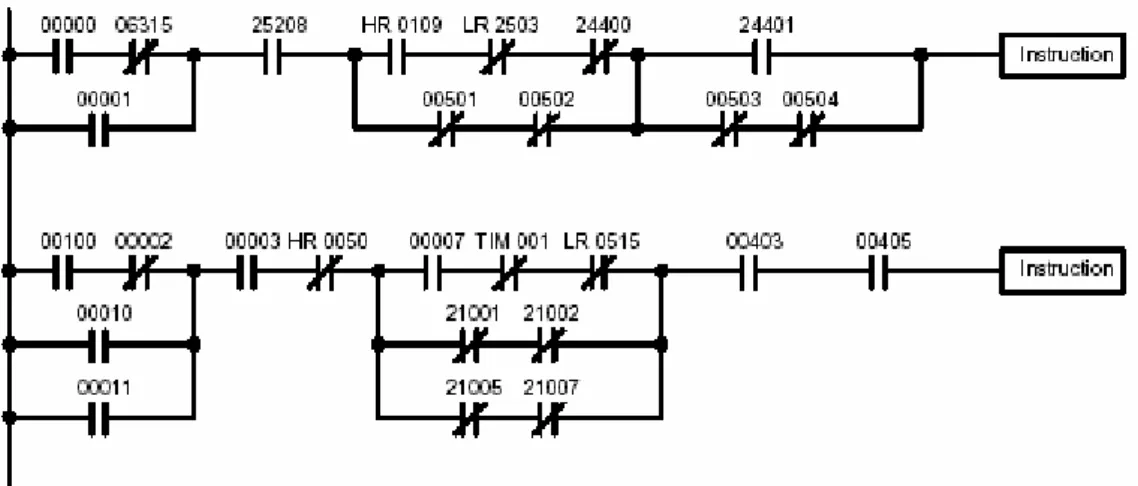
instruksi ) ke kanan ( simbol output ). Gambaran ladder diagram diperlihatkan pada gambar 2.15 di bawah ini :
Gambar 2.15 Ladder Diagram PLC.
Gambar diatas memperlihatkan bahwa tiap – tiap cabang yang terdapat pada setiap jalur instruksi dapat dipisah atau berdiri sendiri dan dapat pula digabungkan, dan setiap garis vertikal yang terdapat pada jalur instruksi dinamakan dengan kondisi.
Kondisi yang tidak dilengkapi dengan garis diagonal dinamakan kondisi Normally Open ( NO ) biasanya kondisi terebut berlaku pada instruksi LD, AND dan OR, sedangkan kondisi yang dilengkapi dengan garis diagonal dinamakan kondisi Normally Close ( NC ) yang biasanya berlaku pada instruksi LD NOT, AND NOT dan OR NOT.
Angka – angka yang tertera pada setiap kondisi mengindikasikan operand bit pada masing – masing instruksi, angka – angka tersebut juga
program ketika dieksekusi ( running program ) agar sesuai dengan perintah yang diinginkan. Setiap kondisi pada suatu ladder diagram sebenarnya terdiri dari ON dan OFF tergantung pada status operand bit yang dituliskan untuk suatu program ( ladder diagram ), kondisi normally open akan ON bila status operand bit adalah ON, dan akan OFF ketika operand bit berstatus OFF.
Sedangkan pada kondisi normally close akan berstatus ON ketika operand bit berstatus OFF dan akan OFF bila operand bit berstatus ON. Umumnya, kondisi normally open ( NO ) digunakan pada saat akan melihat nilai dari suatu bit yang bekerja ( ON ) ketika program tersebut dieksekusi atau dijalankan, dan sebaliknya untuk kondisi normally close ( NC ) digunakan pada saat akan melihat nilai dari suatu bit yang mati ( OFF ) ketika program tersebut diberhentikan ( stop ).
Gambar 2.16 Kondisi Normally Open dan Normally Close.
Untuk menulis suatu program ke dalam PLC dengan menggunakan programming console maka terlebih dahulu ladder diagram sebuah instruksi terlebih dahulu diubah ke dalam bentuk tabel yang biasa disebut mnemonic code.
Didalam penulisan program dalam bentuk mnemonic code ada beberapa hal yang harus diperhatikan yaitu : penulisan program dengan bentuk ini sangat tidak
efektif untuk program yang memiliki tingkat kekompleksan yang tinggi dan sangat disarankan untuk user pemula untuk tidak membuat program dalam bentuk ini, tabel mnemonic code terdiri dari tiga tabel ( pada tipe PLC OMRON ) yaitu :
Î Address ; kolom untuk menentukan alamat dari suatu bit operand.
Î Instruction ; kolom untuk menandakan jenis instruksi logika yang digunakan pada suatu bit operand.
Î Operands ; kolom untuk menentukan jenis keluaran dari suatu cabang instruksi.
Sedangkan baris pada suatu tabel mnemonic code, untuk menentukan jumlah dari keseluruhan alamat yang ada pada satu rangkaian program penuh.
Tabel 2.3 Mnemonic Code.
2.3.5 LOAD dan LOAD NOT
Untuk mengawali suatu kondisi logika dalam setiap penulisan instruksi dimulai dengan LOAD atau LOAD NOT, contoh penggunaan didalam ladder diagram adalah sebagai berikut :
Gambar 2.17 Penggunaan Instruksi Logika LOAD dan LOAD NOT.
Tabel 2.4 Mnemonic Code Instruksi LOAD Dan LOAD NOT.
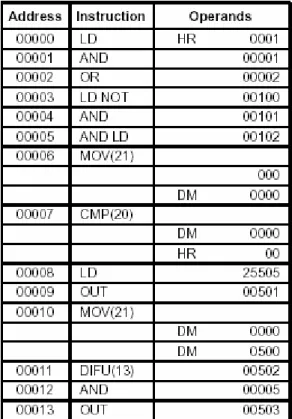
2.3.6 AND dan AND NOT
Instruksi logika ini digunakan untuk membuat hubungan seri diantara dua instruksi logika didalam suatu instruksi ladder diagram, biasanya penulisannya setelah instruksi LOAD atau LOAD NOT, contoh penggunaan dalam ladder diagram :
Gambar 2.18 Penggunaan Instruksi Logika AND dan AND NOT Dalam Suatu Ladder Diagram.
Tabel 2.5 Mnemonic Code Instruksi AND Dan AND NOT.
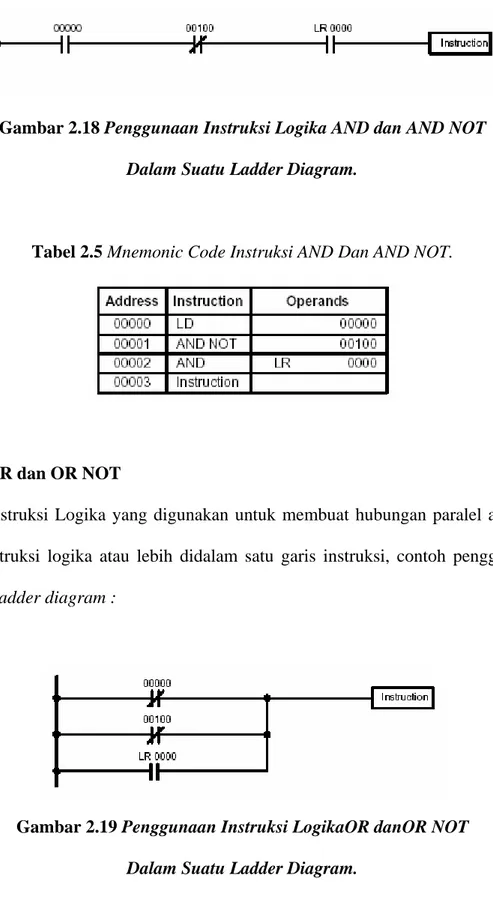
2.3.7 OR dan OR NOT
Instruksi Logika yang digunakan untuk membuat hubungan paralel anatara dua instruksi logika atau lebih didalam satu garis instruksi, contoh penggunaan dalam ladder diagram :
Gambar 2.19 Penggunaan Instruksi LogikaOR danOR NOT Dalam Suatu Ladder Diagram.
Tabel 2.6 Mnemonic Code Instruksi OR Dan OR NOT.
2.3.8 Kombinasi Logika AND, AND NOT, OR dan OR NOT
Ketika instruksi logika AND, AND NOT, OR atau OR NOT digunakan didalam satu jalur instruksi, maka ladder diagram instruksi tersebut akan menjadi majemuk atau kompleks. Didalam penggunaannya, masing – masing instruksi logika tersebut harus diperhatikan agar tidak terjadi kegagalan sistem ketika program dijalankan, contoh penggunaan dalam ladder diagram :
Gambar 2.20 Kombinasi Instruksi Logika AND, OR Dan AND NOT.
Tabel 2.7 Mnemonic Code Kombinasi Instruksi AND, OR Dan AND NOT.
2.3.9 OUT dan OUT NOT
Instruksi ini merupakan tahapan terakhir dari suatu jalur instruksi, instruksi inilah yang menentukan dan mengontrol kondisi output yang diinginkan dari sebuah program.
Instruksi logika OUT memiliki symbol sebuah lingkaran dan memiliki kondisi kerja ON selama jalur instruksi bertegangan ( ON ) dan akan OFF bila jalur instruksi tidak bertegangan ( OFF ).
Instruksi logika OUT NOT memiliki symbol sebuah lingkaran yang dilengkapi dengan garis diagonal dan memiliki kondisi kerja OFF selama jalur instruksi bertegangan ( ON ), ia akan ON bila jalur instruksi tidak bertegangan ( OFF ).
Gambar 2.21 Instruksi Logika OUT.
Tabel 2.8 Mnemonic Code Instruksi Logika OUT.
Gambar 2.22 Instruksi Logika OUT NOT.
Tabel 2.9 Mnemonic Code Instruksi Logika OUT NOT.
2.3.10 END
Instruksi END merupakan instruksi terakhir dari semua rangkaian ladder diagram. Ketika CPU membaca program, ia akan menjalankan semua instruksi dari atas ( insruksi pertama ) sampai bawah ( instruksi terakhir ), yaitu instruksi END.
Instruksi END adalah instruksi yang berdiri sendiri dan tidak dapat digabungkan dengan instruksi logika apapun, jika instruksi ini tidak ditulis atau tidak ada pada suatu program secara keseluruhan maka program tidak dapat dijalankan sama sekali.
Gambar 2.23 Instruksi END.
Tabel 2.10 Mnemonic Code Instruksi END.
2.3.11 AND LOAD
Instruksi ini merupakan suatu instruksi logika blok ( Block Logic Instruction ), instruksi ini dipergunakan bila ingin menuliskan dua buah rangkaian blok atau lebih yang dihubungkan secara seri.
Gambar 2.24 Instruksi AND LOAD.
Tabel 2.11 Mnemonic Code Instruksi AND LOAD.
2.3.12 OR LOAD
Sama dengan instruksi AND LOAD, instruksi ini termasuk ke dalam instruksi logika blok yang digunakan untuk menggabungkan dua rangkaian blok atau lebih secara parallel.
Gambar 2.25 Instruksi OR LOAD.
Tabel 2.12 Mnemonic Code Instruksi OR LOAD.
2.3.13 Timer
Digunakan sebagai alat penunda waktu kerja, timer bekerja bila mendapatkan pulsa tegangan dengan penundaan waktu tertentu yang dapat di atur ( setting ) sesuai kebutuhannnya. Timer akan non aktif bila sumber tegangan di putus ( off ).
Gambar 2.26 Instruksi Timer.
Tabel 2.13 Mnemonic Code Instruksi Timer.
2.4 PENGAMAN
2.4.1 Molded Case Circuit Breaker ( MCCB )
Pengaman yang digunakan untuk mengamankan jalur daya atau rangkaian daya pada sebuah rangkaian. Pengaman ini bekerja dengan dua cara yaitu : secara thermal dan secara magnetic.
¾ Operasi Thermal :
Operasi dari MCCB yang terjadi diakibatkan arus yang mengalir pada MCCB melebihi batas nominal yang diijinkan sehingga bimetal pada MCCB menjadi panas, karena perbedaan muai panjang antara logam yang satu dengan yang lain maka bimetal akan melengkung sehingga bimetal akan menekan tuas pemutus kontak. Akibat tertekannya tuas pemutus kontak maka mekanisme pengunci kontak akan mengendur dan pegas akan menarik lengan kontak sehingga arus terputus, pemutus secara thermal atau thermis ini berlangsung secara lambat.
¾ Operasi Magnetik :
Operasi pada MCCB jika terjadi hubung singkat atau short circuit. Bila terjadi hubung singkat maka arus yang melalui MCCB menjadi sangat besar sehingga pada kumparan akan timbul medan magnet yang sangat kuat. Medan magnet ini akan menarik angker besi lunak yang terdapat pada MCCB sehingga aliran arus akan terputus. Pemutusan secara magnerik ini akan menimbulkan bunga api yang akan langsung diarahkan ke peredam.
Pada jenis – jenis tertentu MCCB ada yang menggunakan micrologic yang berfungsi sebagai pengatur arus nominal yang diijinkan pada rangkaian, waktu pemutusan beban lebih dan pada saat starting, serta sebagai pengatur arus pada saat starting.
Gambar 2.27 Molded Case Circuit Breaker ( MCCB ).
2.4.2 Miniatur Circuit Breaker ( MCB )
Pengaman yang digunakan untuk mengamankan rangkaian kontrol, MCB digunakan untuk mengamankan arus dengan rating dibawah 100 A. operasi kerja pada MCB sama dengan operasi pada MCCB, menurut cara pemasangannya MCB digolongkan ke dalam dua bagian yaitu MCB satu Phasa, MCB dua Phasa dan MCB tiga phasa.
Gambar 2.28 Miniatur Circuit Breaker ( MCB ).
2.4.3 Thermal Overload Relay ( TOR )
Thermal Overload Relay merupakan pengaman arus lebih yang ditujukan untuk mengamankan motor, TOR ini bekerja berdasarkan operasi thermis saja karena ia tidak bisa mendeteksi arus hubung singkat. Umumnya TOR dipasang pada jalur kabel motor setelah kontaktor.
Gambar 2.29 Thermal Overload Relay ( TOR ).
2.4.4 Ampere Meter
Sebenarnya alat ini merupakan alat penunjuk beban mesin yang sedang beroperasi dan penunjukkannya berupa arus ( ampere ), ampere meter yang digunakan berbasis digital dan mempunyai kontak bantu seperti pada perlatan sensor ( pressure switch, load cell, dsb ).
Arus yang dideteksi oleh ampere meter ditentukan dari arus pengenal pada current trafo yang digunakan, pembatasan beban yang boleh ditanggung motor pada saat kompresor bekerja ( keadaan loading ) dapat disetel sesuai dengan arus nominal motor yang tertera pada name plate motor yang digunakan.
Gambar 2.30 Ampere Meter.
BAB III
SISTEM KONTROL KOMPRESOR
3.1 Rangkaian Daya
Rangkaian daya ( power line ) merupakan jalur distribusi sumber daya listrik dari panel sumber yang dialirkan melalui kontaktor untuk menggerakkan motor sebagai prime mover.
Panel sumber yang diambil daya listriknya berfungsi sebagai pemberi daya utama, yaitu dari Main Distribution Board ( MDB ) yang mana tegangannya telah diturunkan terlebih dahulu dari 20 KV menjadi 400 V melalui trafo step down atau trafo penurun tegangan. Aliran daya yang diambil dari MDB kemudian dialirkan ke dalam rangkaian daya setelah terlebih dahulu melewati pengaman utama yang menggunakan Molded Case Circuit Breaker ( MCCB ).
Sistem pengasutan motor yang digunakan menggunakan sistem star – delta connection ( hubungan bintang – segitiga ), yaitu dengan menerapkan tiga buah kontaktor yang memiliki tiga fungsi berbeda, satu kontaktor berfungsi sebagai kontaktor utama ( main contactor ) sedangkan yang dua lagi masing – masing
contactor ).
Prinsip kerja pada sistem pengasutan ini diatur pada sistem kontrol, dimana pada saat starting kontaktor utama dan bintang bekerja bersamaan, kemudian setelah tiga detik kontaktor bintang akan off dan kemudian digantikan oleh kontaktor segitiga, penggantian atau peralihan kontaktor dari bintang ke segitiga diatur oleh timer yang telah diesetel waktu penyalaan kontaknya ( dalam sistem ini disetel 3 detik ).
Aliran daya yang telah melewati kontaktor utama kemudian dilewatkan kembali kedalam thermal overload relay sebelum dihubungkan pada terminal motor.
Gambaran rangkaian daya dan pengasutan motor akan diilustrasikan pada diagram alur ( flowchart ) pada gambar 3.1.
Penerapan rangkaian daya pada sistem kontrol baru terlihat perbedaannya dengan jelas pada pemasangan current trafo ( CT ) sebagai sensor arus yang terbebani pada motor yang kemudian dihubungkan ke ampere meter pada panel motor. Fungsi dari ampere meter selain sebagai monitoring beban yang sedang ditanggung oleh motor, juga berfungsi sebagai pemutus aliran sumber daya listrik pada panel mesin melalui sistem kontrol.
Arus yang sedang mengalirkan daya ke motor akan dibaca pada ampere meter melalui sinyal yang dikirim dari CT, kemudian bila arus yang ditanggaun oleh motor melebihi dari nilai setelan yang telah ditetapkan pada ampere meter, maka ampere
menghentikan sistem yang sedang beroperasi tetapi juga akan menyalakan lampu indikator yang berfungsi sebagai tanda untuk memberitahukan kepada operator terhadap permasalahan yang sedang terjadi.
Gambar 3.1 Flowchart Rangkaian Daya Sistem Kontrol Lama.
ON T Y
1 UTAMA NFB ON
1 TRIP
K1 & K2
1
TIMER ON ( 3 “ ) K1 & K3
TOR
TRIP
MOTOR ON Y
Y
T
T
T Y MDB
Keterangan : 1. Kondisi Stand By
Pengertian loading ialah kondisi disaat kompresor sedang beroperasi dan menghisap udara luar ke dalam ruang kompresi untuk dimampatkan atau dikompresikan hingga menghasilkan udara tekan kemudian dikumpulkan ke dalam tangki pengumpul udara sebelum didistribusikan untuk proses produksi. Secara umum kondisi ini disebut juga kondisi berbeban, sedang pengertian unloading ialah kondisi dari kompresor yang tidak menghisap udara luar baik itu sedang beroperasi atau tidak dan tidak menghasilkan udara tekan.
Pengoperasian kedua kondisi ini diatur oleh operator mesin melalui saklar pilih ( selector switch ) yang terpasang pada panel kontrol, saat mesin beroperasi secara normal yaitu dari keadaan off, kondisi kompresor harus dalam keadaan unloading hal ini bertujuan untuk membantu motor dalam melewati kondisi starting. Kondisi kompresor baru bisa dipilih ke keadaan loading setelah motor melewati kondisi starting atau kondisi ideal untuk menanggung beban,
Kondisi ideal yang dimaksud ialah kondisi dimana motor telah beroperasi pada hubungan delta sehingga tidak menambah nilai dari arus starting ( inrush current ) yang dapat mencapai tujuh kali dari nilai nominal motor dan timbul setiap saat pertama kali mesin dihidupkan. Selector switch yang diputar pada posisi loading akan mengalirkan arus ke bagian input modul pada PLC untuk memberi perintah PLC agar menghidupkan atau memberi perintah kepada solenoid valve ( SLV ) katup 3 / 2 untuk bekerja, SLV akan bekerja mengalirkan angin untuk mengerjakan piston
menggunakan prinsip pneumatic dan disebut dengan throttle isap.
Ketika piston throttle isap telah bekerja maka udara luar akan dihisap masuk ke dalam air intake filter ( penyaring udara ) dan kemudian dibawa ke dalam ruang kompresi untuk dimampatkan sebelum dikumpulkan ke dalam tangki pengumpul udara. Saat kompresor beroperasi kondisi loading – unloading dapat bekerja secara otomatis tergantung pada tekanan udara yang dihasilkan oleh kompresor, jika udara yang dihasilkan telah melewati setelan pada pressure switch yang terpasang ( 9 Bar ), maka kontak dari pressure switch akan memutus aliran listrik ke koil SLV dan mengakibatkan throttle isap menutup sehingga udara luar tidak masuk ke dalam ruang kompresi. Terlepas dari bekerjanya pressure switch, ketika kompresor akan dimatikan ( shutdown ) maka kondisi loading harus diubah ke kondisi unloading agar beban yang tertanggung pada motor menjadi berkurang dan waktu penyalaan kemudian motor tidak langsung terbebani.
Gambar 3.2 Throttle Isap.
3.3.1 Kelemahan – kelemahan
Sistem kontrol lama masih menggunakan sistem konvensional, yaitu masih menggunakan banyak relay sebagai komponen pengatur proses kerja dari sistem kontrol kompresor.
Gambar 3.3 Blok Diagram Sistem Kontrol Lama.
Dengan penggunaan banyak relay maka sistem kontrol kompresor ini menjadi rumit, selain itu kondisi ini diperparah dengan tidak dilengkapinya penomoran pada kabel yang berfungsi sebagai penanda jalur kabel dan modul atau buku pedoman yang mewakili sistem kontrol ini sehingga akan memakan waktu yang lama pada saat perbaikan ketika terjadinya troubleshooting.
S E N S O R
KUMPULAN RELAY I
N P U T
D E V I C E
O U T P U T
D E V I C E
Gambar 3.4 Rangkaian Kontrol Sistem Lama.
3.3.2 Sistem Pengamanan Pada Sistem Kontrol Lama
Bila ditinjau dari segi sistem pengamanan mesin yang difokuskan kepada prime mover ( motor ), sistem kontrol lama hanya mengandalkan pada breaker utama ( MCCB ) dan thermal overload relay ( TOR ) sebagai komponen pengamanan aliran daya terhadap beban lebih, karakteristik dari TOR menggunakan system thermis atau panas pada kontak yang dimilikinya sebagaimana yang terlihat pada gambar 3.5, sedangkan MCB yang digunakan berfungsi sebagai pengaman terhadap jalur sistem kontrol. Pressure switch dan pressure gauge digunakan sebagai sensor pengaman dan indikator terhadap tekanan dan temperatur oli.
Namun pada penerapannya sistem pengaman pada sistem kontrol lama sangat bergantung pada tingkat kejelian dari operator mesin didalam menemukan masalah
terjadi pada motor sering mengakibatkan kondisi breakdown, yaitu kondisi dimana mesin berhenti secara tiba – tiba dan tidak melalui proses yang normal dan sangat mempengaruhi kepada proses produksi yang sedang berlangsung.
Gambar 3.5 Karakteristik Thermal Overload Relay.
Permasalahan yang kerap terjadi pada motor adalah rusaknya bearing yang merupakan salah satu dari komponen motor dan terpasang pada rotor. bearing berfungsi sebagai penopang rotor, penjaga kestabilan dan kelancaran perputaran rotor ketika motor bekerja. Kerusakan pada bearing dibagai menjadi tiga tingkatan
tingkatan kerusakan sedang ) dan high damage ( tingkatan kerusakan serius ).
Tingkat kerusakan ringan ( low damage ) merupakan tingkat kerusakan pada bearing yang tidak menimbulkan dampak kerusakan yang cukup serius, biasanya pada tingkat kerusakan ini, kerusakan yang dialami bearing hanya berupa kurangnya pelumasan pada bola – bola peluru didalamnya sehingga putaran rotor sedikit tersendat atau tidak lancar. Perbaikan kerusakan pada tingkat kerusakan ringan, cukup diberikan tambahan pelumasan pada bearing khususnya pada bola – bola peluru agar bergerak lancar.
Gambar 3.6 Komponen – Komponen Pada Motor.
Tingkat kerusakan sedang ( medium damage ) merupakan tingkat kerusakan yang terjadi pada bearing yang bukan saja hanya mengalami penurunan pada kadar pelumasannya, tetapi bola – bola peluru yang berfungsi sebagai bantalan dan
kedudukannya pada rel cincin telah goyang. Perbaikan yang harus dilakukan pada tingkatan ini yaitu bearing harus diganti karena tingkat kerusakan ini sangat berpotensi menjadi tingkatan kerusakan serius ( high damage ).
Tingkat kerusakan serius ( high damage ) merupakan tingkat kerusakan yang sangat fatal karena dapat mengakibatkan kondisi breakdown dan memakan waktu perbaikan yang lama, pada tingkat ini kondisi bearing yang telah rusak tak menentu bentuknya tergantung pada material pembuatnya, kondisi bearing dengan material yang bagus jika terjadi kerusakan dengan tingkat ini akan mengakibatkan bearing menjadi macet sedangkan kondisi bearing dengan material pembuat yang kurang bagus umumnya kondisi bearing langsung menjadi hancur atau rusak. Dan apapun kondisi kerusakan bearing pada tingkat kerusakan serius dapat mengakibatkan gulungan stator pada motor mengalami short circuit atau menjadi terbakar, perbaikan yang dilakukan pada tingkat kerusakan ini selain mengganti bearing motor juga harus menggulung ulang stator motor dan hal ini akan membutuhkan biaya perbaikan yang tidak sedikit jumlahnya.
3.4.1 Deskripsi Kerja
Sistem kontrol baru telah mengadopsi teknologi PLC sebagai pusat dari segala aktivitas proses kontrol pada mesin kompresor, ditinjau dari deskripsi kerja antara sistem kontrol baru dengan sistem kontrol lama sebenarnya tidak jauh berbeda, perbedaannya terlihat jelas pada teknologi yang diadopsi. Pada sistem kontrol lama menggunakan sistem konvensional dengan menggunakan relay – relay sebagai prosesor atau otak sistem kontrol sedangkan pada sistem kontrol baru menggunakan teknologi PLC.
Sistem kontrol baru yang diterapkan pada mesin bisa dioperasikan jika lampu indikator ready operation yang terdapat pada panel kontrol mesin telah menyala, lampu indikator ini menyala bila tidak adanya sensor – sensor yang mendeteksi adanya gangguan yang dialami oleh mesin seperti tekanan oli kurang, aliran air tidak ada atau temperatur oli yang terlalu berlebihan dari nilai setelan. Mesin dapat beroperasi ketika selector switch diputar ke posisi ON oleh operator, selanjutnya sinyal input yang berupa aliran listrik akan dikirim oleh selector switch kepada input modul yang terdapat pada PLC. PLC akan mengatur dan mengirim aliran sinyal tersebut ke dalam alamat – alamat yang telah ditentukan ( sesuai dengan program yang telah dituliskan ) kepada output modul untuk kemudian didistribusikan, kontaktor utama ( main ) dan bintang ( star ) akan bekerja pertama kali pada proses
timer yang terintegrasi menjadi satu didalam PLC akan bekerja dan mematikan kontaktor bintang dan menghidupkan kontaktor segitiga ( delta ) dan pada saat ini motor telah bekerja dengan hubungan segitiga dan telah berada pada kondisi ideal untuk menanggung beban.
Gambar 3.7 Blok Diagram Sistem Kontrol Baru.
3.4.2 Keunggulan Sistem Kontrol Baru
Gambar 3.8 Rangkaian Kontrol Sistem Baru.
I N P U T
O U T P U T
CPU
Msebagai prosesor sistem kontrol telah diterapkan, maka sistem kontrol baru ini memiliki beberapa keunggulan jika dibandingkan dengan sistem kontrol lama.
Beberapa keunggulan sistem baru disbandingkan dengan sistem kontrol lama yaitu : 1. Penggunaan komponen kontrol yang relatif sedikit, karena fungsi dari
komponen – komponen tersebut terwakili dengan teknologi yang terdapat pada PLC, seperti contoh fungsi relay, timer, counter, dsb.
2. Dibuatnya penomoran kabel dan buku pedoman sistem kontrol sehingga mempermudah saat perbaikan ketika troubleshooting sedang terjadi.
3. Dengan tambahan pemasangan alat proteksi tambahan, maka kondisi breakdown dapat di antisipasi, sehingga seandainya terjadi kerusakan waktu dan biaya perbaikan dapat ditekan.
3.4.3 Pemilihan Komponen Kontrol 3.4.3.1 PLC
PLC yang digunakan adalah OMRON dengan tipe CPM1A, PLC ini menggunakan tegangan kerja 220 Vac yang diambil langsung dari MCB sebagai pengaman utama kontrol.