LAPORAN AKHIR
PENELITIAN UNGGULAN ITS
(Penelitian Terapan Multi-Disiplin)
DANA ITS TAHUN 2020
(TAHUN PERTAMA DARI TIGA TAHUN)
PENGEMBANGAN SEARCH AND RESCUE BOAT (IBOAT):
STRUKTUR DESAIN DAN STRATEGI PRODUKSI
Tim Peneliti :
Ketua : Prof. Ir. Achmad Zubaydi, M.Eng., Ph.D. (Teknik Perkapalan, FTK)
Anggota 1 : Sufian Imam Wahidi, S.T., M.Sc.
(Teknik Perkapalan, FTK)
Anggota 2 : Danu Utama, S.T., M.T.
(Teknik Perkapalan, FTK)
Anggota 3 : Hasan Iqbal Nur S.T., M.T.
(Teknik Perkapalan, FTK)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Daftar Isi
Daftar Isi ... i
Daftar Tabel ... ii
Daftar Gambar ... iii
Daftar Lampiran ... iv
BAB I RINGKASAN ... 1
BAB II HASIL PENELITIAN... 2
2.1. Umum ... 2
2.2. Analisis perhitungan reverse engineering ... 3
2.3. Analisis Kekuatan lambung kapal iboat ... 9
2.4. Penentuan Strategi Metode Produksi ... 11
2.5. Perencanaan produksi kapal ... 16
2.6. Penambahan pegangan dan pijakan sebagai akses korban dilaut ... 17
2.7. Penambahan pegangan dan pijakan sebagai akses korban dilaut ... 18
BAB III STATUS LUARAN... 21
BAB IV PERAN MITRA ... 22
BAB V KENDALA PELAKSANAAN PENELITIAN ... 23
BAB VI RENCANA TINDAK LANJUT PENELITIAN ... 24
BAB VII DAFTAR PUSTAKA ... 25
BAB VIII LAMPIRAN... 26
DAFTAR TABEL
Tabel 2. 1. Perhitungan pembebanan pada lambung [1]. ... 5
Tabel 2. 2. Hasil nilai perhitungan pembebanan ... 5
Tabel 2. 3. Faktor koreksi area pembebanan ... 6
Tabel 2. 4. Persamaan perhitungan beban area geladak ... 6
Tabel 2. 5. Persamaan ketebalan pelat kapal ... 6
Tabel 2. 6. Nilai perhitungan ketebalan pelat ... 7
Tabel 2. 7. Ukuran minimum konstruksi penumpu kapal ... 7
Tabel 2. 8. Rencana Produksi kapal ... 16
Tabel 3. 1 Status Luaran ... 21
DAFTAR GAMBAR
Gambar 2. 1. Diagram alir penelitian secara umum ... 2
Gambar 2. 2. Desain kapal rescue boat ... 3
Gambar 2. 3. Proses desain linesplans lambung ... 4
Gambar 2. 4. Bagian konstruksi kapal rescue boat ... 7
Gambar 2. 5. Visualisasi 3D perhitungan scantling konstruksi lambung ... 8
Gambar 2. 6. General Arrangement kapal rescue boat ... 8
Gambar 2. 7. Kondisi kapal lambung muatan kosong tanpa ballast dan engine ... 9
Gambar 2. 8. Kondisi kapal lambung muatan kosong tanpa ballast dan engine ... 10
Gambar 2. 9. Tegangan maksimum dari lambung kapal ... 10
Gambar 2. 10. Deformasi maksimum dari lambung kapal ... 11
Gambar 2. 11. Proses Fabrikasi Kapal ... 13
Gambar 2. 12. Proses Assembly kapal ... 14
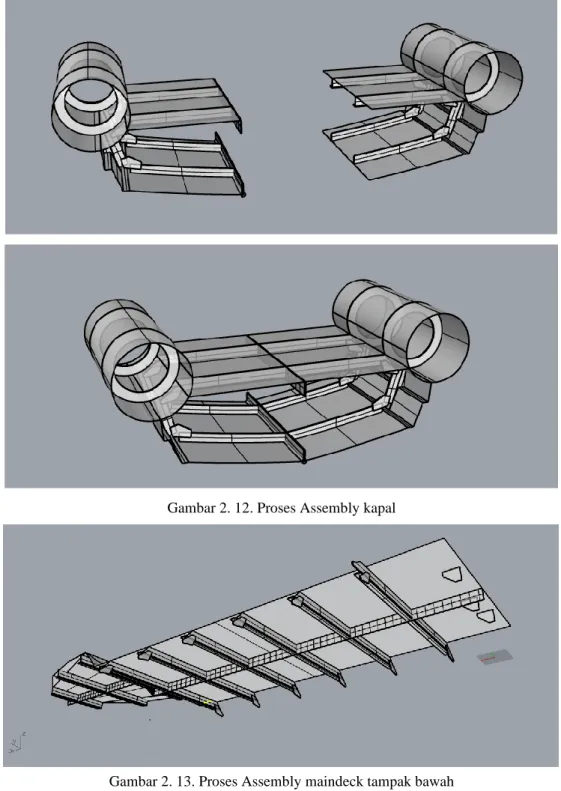
Gambar 2. 13. Proses Assembly maindeck tampak bawah ... 14
Gambar 2. 14. Konstruksi side Tube ... 15
Gambar 2. 15. Konstruksi scantling bottom ... 15
Gambar 2. 16. Konstruksi bagian dalam lambung ... 15
Gambar 2. 17. Tampak depan desain pijakan ... 17
Gambar 2. 18. Gambar pijakan tampak samping ... 18
Gambar 2. 19. Gambar pijakan tampak atas ... 18
Gambar 2. 20. Letak pelampung hidrolis ... 19
Gambar 2. 20. Pelampung Hidrolis pada saat kapal terbalik ... 19
Gambar 2. 20. Pelampung hidrolis memberikan gaya angkat untuk memberikan momen pengembali ... 19
Daftar Lampiran
Lampiran 1. Perhitungan Berat ... 26 Lampiran 2. Gambar 3D perkiraan berat ... 27 Lampiran 3. Draft Paten (1) ... Lampiran 3. Draft Paten (2) ...
BAB I RINGKASAN
Rescue boat adalah salah satu jenis kapal yang digunakan sebagai alat transportsi
keselamatan di permukaan air. Rescue boat berfungsi sebagai alat pengangkut untuk alat keselamatan di perairan serta untuk mengangkut penumpang/korban yang terjatuh dari kapal/perahu ke dalam air. Ukuran kapal yang tidak terlalu besar memungkinkan kapal tipe ini untuk dapat digunakan sewaktu-waktu dalam keadaan darurat dan dapat diangkut oleh kapal yang lebih besar yang mempunyai potensi terhadap kecelakaan di laut.
Dalam misi penyelamatan tertentu seperti dalam kondisi gelombang tinggi, rescue boat cukup beresiko atau bahkan hampir tidak memungkinkan untuk dioperasikan oleh manusia. Selain itu untuk misi pencarian korban, kapal tipe ini akan lebih efektif dan efisien jika bekerja tanpa manusia. Oleh karena itu, pada penelitian ini dikembangkan autonomous search and rescue boat yang dapat dikendalikan tanpa awak untuk memenuhi misi-misi sulit tersebut. Penelitian ini berfokus pada pengembangan desain struktur dan strategi produksi dari kapal autonomous search
and rescue boat.
Penggunaan konstruksi melintang pada kapal autonomous tipe rescue boat, dibuat untuk mempermudah produksi dan dari sisi lain dari segi panjang tidak lebih dari 12 meter. Material seperti fiberglass dan alumunium dipertimbangkan untuk mendapatkan kekuatan dan ketahanan pada operasionalnya, dimana kapal rescue boat harus memiliki ketahanan terhadap beban kejut gelombang ketika dijatuhkan ke permukaan air laut dan menembus api ketika berusaha menyelamatkan korban. Selanjutnya didapatkan pemilihan bahan alumunium karena dirasa paling sesuai dengan kriteria tersebut. Untuk perhitungan scantling didapatkan ukutan konstruksi profil,
web frame, shell dan keel untuk kapal iboat.
Oleh karena itu pada penelitian ini, konstruksi kapal dengan jenis alumunium dipilih karena memiliki berat jenis kapal yang tidak terlalu berat dan memiliki kemudahan dari segi produksi. Inovasi yang diberikan pada iboat ini ditekankan pada kemampuan stabilitas dan alat penyelamatan korban. Pengembangan desain self-right stability didesain menggunakan pelampung yang mampu memberikan gaya pembalik pada kapal sehingga kapal memiliki kemampuan stabilitas yang lebih baik. Selain itu untuk memudahkan penyelamatan korban, desain pijakan pada sisi kanan dan kiri diberikan pada kapal sehingga memungkinkan korban untuk meraih dan memudahkan naik ke atas kapal yang tanpa awak untuk melakukan penyelamatan diri dari kondisi yang berbahaya.
Ringkasan penelitian berisi latar belakang penelitian,tujuan dan tahapan metode penelitian, luaran yang ditargetkan, kata kunci
BAB II HASIL PENELITIAN
2.1. UmumSesuai dengan tujuan khsuus penelitian ini beberapa hal yang ingin dicapai dalam penelitian ini adalah membuat desain konstruksi yang memenuhi dari segi kekuatan, membuat desain gambar produksi sesuai dengan perhitungan konstruksi dengan memperhatikan kemudahan segi produksi kapal agar menjadi produk yang aplikatif dalam kebutuhan perancangan desain kapal search and
rescue (SAR) autonomous boat sebagai tujuan akhir penelitian. Optimalnya sebuah konstruksi dan
kemudahan produksi ditetapkan dari beban, daerah operasional yang direncanakan untuk mendapatkan material properties dan perhitungan kekuatan konstruksi agar kapal mampu beroperasi pada desain operasional yang telah dirancanakan [1]. Adapun tahapan-tahapan yang dilakukan untuk mendapatkan konstruksi yang sesuai dengan kriteria yang diinginkan sesuai gambaran umum penelitian pada Gambar 2.1.
Gambar 2. 1. Diagram alir penelitian secara umum
Pada penelitian ini memiliki dua objek penelitian, pertama studi dilakukan pada kapal rescue boat sebagai objek pertama. Metode untuk mengetahui karakteristik kapal adalah dengan melakukan proses reverse engineering. Proses reverse engineering adalah mengaji desain untuk mendapat referensi kekuatan desain konstruksi kapal dari segi penggunaan material dan desain untuk pertimbangan dalam mengoptimalkan konstruksi pada desain baru. Selain itu hal ini dilakukan untuk menunjang riset ini lebih ke arah aplikatif. Hal ini dilakukan pada lambung kapal
autonomous desain versi pertama [2]. Tujuan Langkah ini digunakan untuk mengetahui estimasi
berat, kekuatan konsteuksi lambung serta sebagai referensi dalam mendesain kapal kedua agar dapat menjalankan misi penyelamatan dengan gambar kapal rescue boat pada gambar 2.2.
Gambar 2. 2. Desain kapal rescue boat
2.2. Analisis perhitungan reverse engineering
Reverse Engineering ini dimulai dengan melakukan redesain gambar kapal existing utnuk
mendapatkan bentuk lambung yang sesuai digunakan untuk perhitungan tahapn selanjutnya, untuk mendefinisikan hal tersebut dilakukan pengukuran secara langsung dimensi kapal [3]. Metode ini dilakukan dengan cara mengukur ulang dimensi kapal dan jarak gading pada kapal desain awal. Dari proses pengukuran kapal pertama didapatkan ukuran utama kapal dapat dilihat pada Tabel 2.1.
Tabel 2. 1. Ukuran lambung kapal No. Deskripsi Ukuran Satuan
1 Length Overall (LoA) 4.70 meter 2 Breadth (B) 2.08 meter 3 Height (H) 0.75 meter 4 Draft Design (T) 0.30 meter
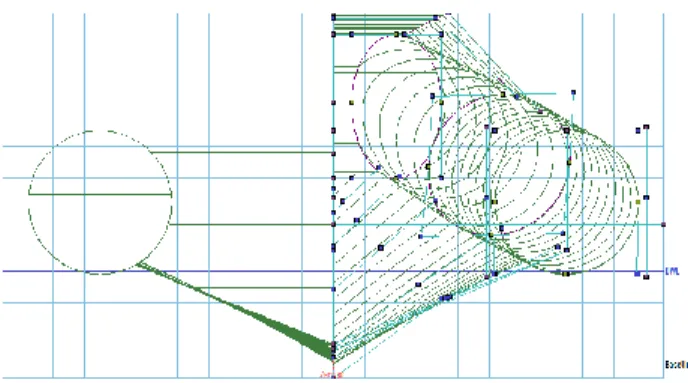
Selanjutnya untuk setelah dilakukan pengukuran, kapal dimodelkan untuk mengetahui karakteristik kapal, menghitung scantling konstruksi dan membuat gambar keyplan untuk proses produksi. Pemodelan lambung dari data-data hasil pengukuran dimodelkan menggunakan software Maxsurf modeler advanced. Model didefinisikan dari data garis-garis awal yang didapatkan masih belum streamline sehingga harus ditambahkan control point dan pengaturan ukuran untuk
mendapatkan hasil desain yang sesuai diinginkan. Proses pembuatan desain linesplans dapat dilihat pada Gambar 2.3. (a) (b) (c)
Proses desain dilakukan dengan mengatur control point dari maxsurf dengan data gambar yang didapatkan dari foto kapal dan pengukuran, disesuaikan bentuk dari tampak depan Gambar 2.3 (a), tampak atas (b) dan tampak samping (c). Berdasarkan gambar-gambar tersebut didapatkan model kapal yang mendekati sebagai referensi untuk melakukan perhitungan scantling untuk mengetahui kapal memenuhi ukuran konstruksi yang didesain.
Proses pengukuran ini digunakan sebagai masukkan data untuk menghitung ulang kebutuhan minimum ketebalan pelat dan ukuran scantling dari gading kapal. Perhitungan ulang konstruksi dilakukan didasarkan dengan [4]. dimana perhitungan ini dilakukan sebagai pendekatan untuk mendapatkan ukuran yang sesuai dengan persamaan pembebanan yang digunakan. Dilakukan perhitungan persamaan menggunakan persamaan pada Tabel 2.1.
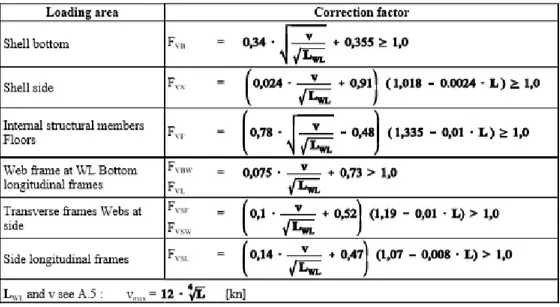
Tabel 2. 1. Perhitungan pembebanan pada lambung [4].
Persamaan yang digunakan untuk menghitung beban adalah pada jenis motor craft karena tidak terdapat layar pada desain kapal. Sehingga didapatkan hasil beban pada lambung bawah bagian depan dan bagian belakang serta kulit sisi bagian depan den bagian belakang dengan nilai masing-masing dapat dilihat pada Tabel 2.2.
Tabel 2. 2. Hasil nilai perhitungan pembebanan
No. Deskripsi Ukuran Satuan
1 Pdouble bottom
(fore) 15.98 kN/m
2
2 Pdouble bottom (aft) 12.78 kN/m2
3 P side shell (fore) 10.60 kN/m2
4 P side shell (aft) 8.46 kN/m2
Perhitungan beban dilanjutkan dengan koreksi faktor dari penentuan lokasi area sesuai dengan persamaan koreksi faktor pada Tabel 2.3.
Tabel 2. 3. Faktor koreksi area pembebanan
Perhitungan area pembebanan digunakan untuk mendapatkan tebal pelat dan besar modulus penumpu melintang pada daerah bottom, dan sisi pada setiap koreksi area yang telah dihitung. Selanjutnya dilakukan perhitungan beban untuk mendapatkan pembebanan pada deck dengan persamaan pada Tabel 2.4.
Tabel 2. 4. Persamaan perhitungan beban area geladak
Setelah nilai beban – beban didapat, nilai beban tersebut digunakan untuk menghitung ketebalan pelat di setiap area dengan persamaan pada Tabel 2.5.
Dari persamaan-persamaan diatas didapatkan nilai ketebalan pelat pada masing-masing bagian konstruksi kapal disajikan pada Tabel 2.6.
Tabel 2. 6. Nilai perhitungan ketebalan pelat
No. Deskripsi Tebal Satuan
1 Plate deck 4 mm 2 Webfloor 4 mm 3 Shell bottom 6 mm 4 Shell Side 4.35 mm
Perhitungan pendekatan perhitungan pelat disesuaikan dengan pengecekan pada ketebelan pelat bottom dan dari hasil pengukuran pelat pada kapal didapati ketebalan pelat bottom memiliki nilai sesuai desain perencanaan yaitu adalah 5.5 mm. Sehingga dapat dilanjutkan dengan perhitungan besar ukuran minimum pada bottom transverse kapal rescue boat dan didapatkan ukuran konstruksi minimum sebagai support disajikan pada Tabel 2.7.
Tabel 2. 7. Ukuran minimum konstruksi penumpu kapal
No. Deskripsi Ukuran Satuan
1 Floors 50 x 7 mm 2 Bottom transverse 50 x 5 mm 3 Deck beam 60 x 40 x 5 mm 4 Deck Girder 50 x 5 mm 5 Bar keel 95 mm
Sehingga dapat dilihat tiap bagian konstruksi kapal eksisting pada Gambar 2.4.
Gambar 2. 4. Bagian konstruksi kapal rescue boat
Dari penentuan konstruksi berikut dapat diperkirakan estimasi berat kapal dengan menggunakan perhitungan pendekatan dan didapatkan nilai berat kapal sebesar 375.75 kg dengan material alumunium 5083 untuk pelat lambung dan alumunium 6082 untuk profile dan pipe. Berat
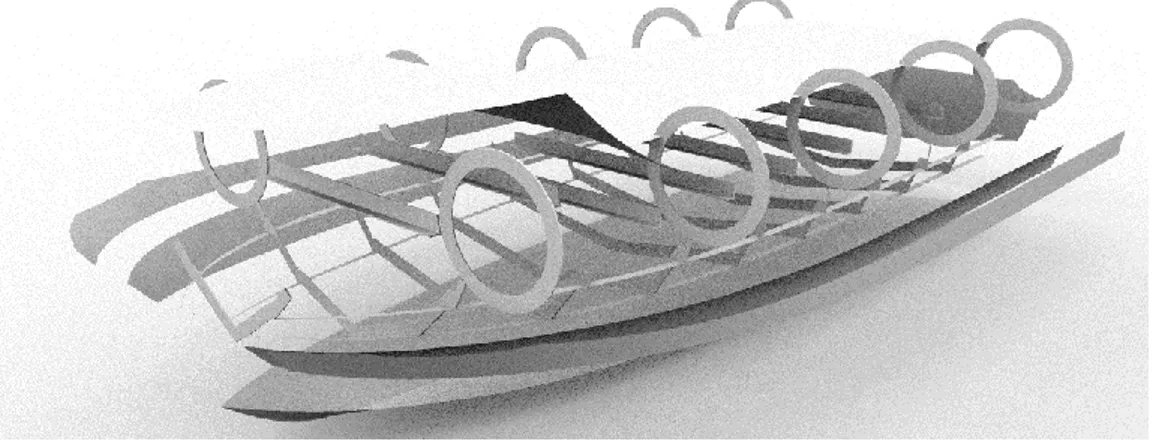
material dihitung dari tebal kulit, frame, floor, bottom transverse, deck girder dan bar keel. Dengan visualisasinya dapat dilihat pada Gambar 2.5.
Gambar 2. 5. Visualisasi 3D perhitungan scantling konstruksi lambung
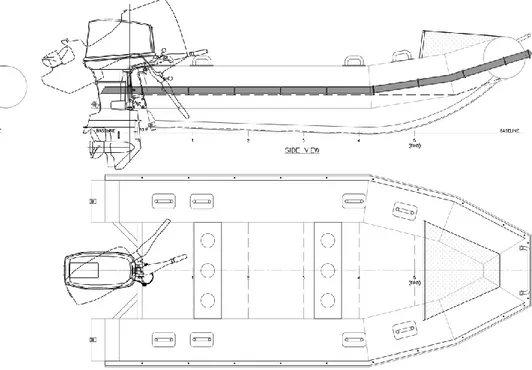
dari lines plans dan perhitungan scantling dilakukan penentuan letak pemasangan mesin pada kapal ini dapat dilihat pada Gambar 2.6.
Gambar 2. 6. General Arrangement kapal rescue boat
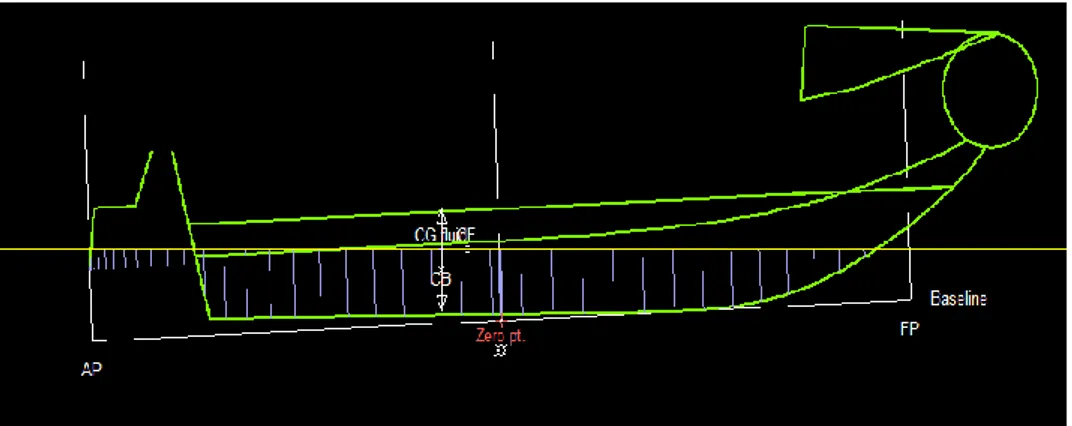
Berdasarkan gambar general arrangement tersebut dilakukan perhitungan titik berat untuk mengetahui letak LCG kapal sebelum dilakukan pemasangan sistem kendali pada tripod guna memasang perlengkapan iboat. Kemudian didapatkan posisi kapal dengan kondisi kosong dapat dilihat pada Gambar 2.7.
Gambar 2. 7. Kondisi kapal lambung muatan kosong tanpa ballast dan engine
Kondisi ini merupakan kondisi dimana kapal dengan segala perlengkapannya membawa muatan penuh.. Kondisi ini sangat perlu diperhitungkan terutama untuk trim dan stabilitasnya karena kondisi ini merupakan kondisi saat kapal berlayar dan beroperasi. Maka saat proses perhitungan, kriteria-kriteria dari IMO haruslah dipenuhi. Perhitungan trim dan stabilitas nantinya akan disesuaikan dengan peraturan [5].
Data-data beban dari komponen yang ada (diambil dari hasil perhitungan berat dan titik berat) [6]. Data-data yang dibutuhkan untuk beban-beban pada komponen tersebut antara lain berat komponen, LCG komponen, VCG komponen, dan TCG. Setelah beban dimasukkan, selanjutnya dilakukan proses analisis. Hasil analisis menunjukkan besaran longitudional center gravity (LCG) kapal adalah sebesar 0.22 m dibelakang midship dan vertical center gravity (VCG) sebesar 0.025 m.
2.3. Analisis Kekuatan lambung kapal iboat
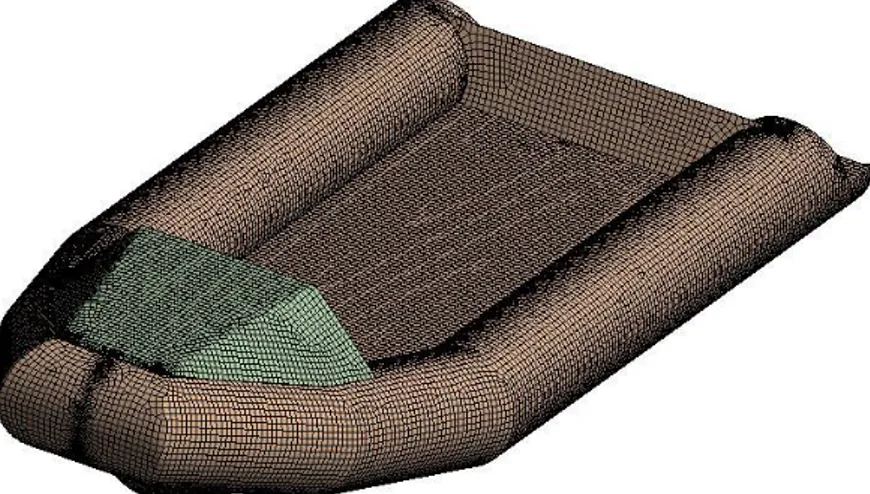
Selanjutnya setelah nilai scantling didapatkan dilakukan analisis finite element untuk mengetahui tegangan yang terjadi ketika kapal mendapatkan beban hydrostatic dari air laut. Beban hidrostatik diperhitungkan dengan melihat air yang menabrak pada permukaan pelat kapal. Data yang diperlukan adalah densitas air laut yaitu sebesar 1025 kg/m3 dan kecepatan pada kapal pada desain adalah 20 knot atau 10.28 m/s. dengan data tersebut pergerakan i-boat diasumsikan dengan percepatan 2 m/s pada kecepatan maksimum dan didistribusikan pada bagian lambung kapal. Proses pemodelan kekuatan dilakukan dengan memasukkan data 3D kapal untuk dilakukan diskritisasi [7]. Pendekatan pembagian elemen-elemen dimodelkan pada struktur lambung kapal iboat, jenis elemen yang digunakan adalah element 3 dimensi dapat dilihat pada Gambar 2.8.
Gambar 2. 8. Kondisi kapal lambung muatan kosong tanpa ballast dan engine
Hasil analisis struktur dari kondisi beban hydrostatic terhadap tegangan dan deformasi pada kapal iboat dapat dilihat pada Gambar 2.9 dan Gambar 2.10.
Gambar 2. 10. Deformasi maksimum dari lambung kapal
Tegangan terjadi akibat hidrostatik pressure pada lambung adalah sebesar 26 MPa dan deformasi lambung sebesar 0.73 mm, maka dengan analisis ini lambung kapal telah memenuhi persyaratan kekuatan konstruksi untuk beroperasi dengan kecepatan 20 knot. Pemenuhan tegangan dapat diperkirakan dari nilai tegangan yang didapatkan dengan tegangan tersebut dapat ditentukan apabila kapal telah memenuhi tegangan ijin [8].
2.4. Penentuan Strategi Metode Produksi
Dalam pembangunan kapal rescue pada penelitian ini, terdapat 3 tahapan yang dilakukan, yaitu [9]:
▪ Persiapan
Tahap persiapan produksi merupakan satuan proses yang harus dilakukan sebelum melakukan proses produksi. Tujuan dari tahap ini yaitu mengatur keadaan yang bersifat perencanaan sehingga pada waktu yang ditentukan pekerjaan pembangunan kapal dapat dilaksanakan dan ditetapkan. Ruang lingkup tahap ini yaitu :
1. Dokumen produksi (umum) yang meliputi gambar dan daftar material, perkiraan kebutuhan tenaga kerja dan perkiraan kebutuhan material.
2. Tenaga kerja yang terlibat dalam kaitannya dengan kualifikasi dan jumlah tenaga kerja dan pekerjaan lain.
3. Material yang dipersiapkan dengan mempertimbangkan : keadaan atau stok gudang pemakaian material untuk pekerjaan sekarang, pemesanan/pembelian material dari luar (jumlah dan waktu pembelian)
4. Fasilitas dan sarana produksi yang meliputi kemampuan bengkel produksi, kapasitas mesin-mesin, alat-alat angkat yang tersedia (jumlah, kapasitas, macam dan tempat) keadaan building berth/floating dock.
Pada tahap ini untuk pertama kalinya spesifikasi kapal yang ditentukan sesuai dengan kontrak/pesanan diterjemahkan dalam bentuk basic design. Spesifikasi kapal yang dimaksudkan misalnya jenis kapal, bobot mati, kecepatan, radius pelayaran dan lain-lain. Pada basic design yang dipersiapkan antara lain :
- Lines Plan
- General Arrangement
- Midship Section
Pekerjaan selanjutnya adalah planning yang merupakan pembuatan rencana produksi yang terdiri dari pembuatan Schedule pembanguanan (penjadwalan tiap tahap dan keseluruhan) hingga alokasi standart kerja (kebutuhan dan kualitas tenaga kerja) dan juga penanganan raw material dengan proses Straightening, Blasting, Premier Coating, dan
Material Handling [10].
▪ Fabrikasi
Fabrikasi merupakan tahapan awal dalam proses produksi konstruksi kapal (steel
construction), dan menghasilkan sebagian besar komponen yang membentuk struktur kapal
tersebut. Untuk melakukan fabrikasi material dibutuhkan gambar produksi yang merupakan pengembangan dari Key Plan dan Detail Plan. Proses fabrikasi dapat dilihat pada Gambar 2.11.
Gambar 2. 11. Proses Fabrikasi Kapal
Gambar-gambar ini (Production Drawings) adalah gambar-gambar detail per sub-komponen yang merupakan kelanjutan dari Detail Plan setelah diberi informasi teknis untuk pengerjaan di lapangan (bengkel assembly). Disamping gambar-gambar produksi ini, juga dibuatkan piece list (daftar komponen) lengkap dengan ukurannya masing-masing.
Design/Production Drawing selain digunakan untuk pekerjaan praktis di lapangan, juga
untuk mengontrol pekerjaan produksi kapal (production control). material yang dibutuhkan untuk pembuatan kapal tersebut yang meliputi: pelat baja lembaran, profil, expended metal, dan lainnya. Material tersebut pada fabrikasi akan melaui proses marking, cutting, dan
bending sesuai kebutuhan dan bentuk bagian kapal yang akan digunakan dalam
pembangunan kapal. ▪ Assembly
Assembly adalah lanjutan dari proses fabrikasi dimana bagian-bagian pelat dan profil
penguat yang telah dirakit sebelumnya, digabungkan dengan bagian-bagian lain sehingga menjadi satu bangunan tiga dimensi yang lebih besar dan kompak yang sering disebut sebagai blok. Proses-proses yang dilakukan pada tahap assembly meliputi Fitting, Welding,
Fairing, Grinding, dan Material Handling.
Raw Plate
Gambar 2. 12. Proses Assembly kapal
Gambar 2. 14. Konstruksi side Tube
Gambar 2. 15. Konstruksi scantling bottom
2.5. Perencanaan produksi kapal
Dalam proses pembangunan kapal maka perlu menganalisa waktu penyelesaian pembangunan kapal maka harus dilakukan perencanaan dan penjadwalan. Tujuan dari perencanaan adalah menetapkan keadaan - keadaan tersebut dalam suatu proses menjadi suatu urutan kerja yang efisien, sedangkan tujuan penjadwalan adalah mengatur keadaan – keadaan tersebut dalam suatu batasan waktu yang ditentukan. Berikut ada perkiraan jadwal pembangunan dari kapal yang diteliti, yaitu selama 3 minggu pengerjaan.
Tabel 2. 8. Rencana Produksi kapal
Jadwal Produksi
Tahap item Pekerjaan Minggu 1 Minggu 2 Minggu 3
1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 Preparation Raw Plate
Straightening Material Handling Fabrication Main Deck Marking Cutting Bending Grinding Material Handling Side Shell Marking Cutting Bending Grinding Material Handling Bottom Marking Cutting Bending Grinding Material Handling Assembly
Fitting dengan GMAW Welding
Machine
Welding dengan GTAW Welding
Machine Fairing Grinding Material Handling Installation Machinery Electricity Navigation Outfitting Launching/Trial
2.6. Penambahan pegangan dan pijakan sebagai akses korban dilaut
Pembuatan kapal penyelamat autonomous dengan territory perairan terbatas memerlukan tingkat keamanan yang lebih, dalam hal ini dapat memperhatikan tahapan penyelamatan korban adapun hal yang perlu diperhatikan dimana korban yang sedang mengalami kecelakaan terapung pada kondisi yang sudah kehilangan tenaga, dengan desain grip existing untuk diraih korban memerlukan energi lebih besar, untuk itu dilakukan desain pijakan untuk penyelamatan korban secara mandiri. kapal pencari korban kecelakaan adalah salah satu jenis kapal yang digunakan sebagai sarana pencarian korban yang mengapung di atas permukaan laut. Ukuran dari kapal ini tidak terlalu besar, sehingga dapat digunakan sewaktu-waktu dalam keadaan darurat. Kapal ini biasa dibawa atau diangkut oleh kapal yang berukuran lebih besar yang mempunyai potensi terhadap kecelakaan di laut.
Sistem autokendali pada kapal tipe kapal penyelamat, dibuat untuk mempermudah pengoperasian kapal, bahkan tidak perlu adanya operator atau kru pada kapal tersebut. Sehingga pada aplikasinya, kapal tersebut akan beroperasi mencari korban tanpa dikendalikan oleh operator atau kru kapal. Oleh sebab itu, untuk memudahkan korban memindahkan diri dari permukaan laut ke atas kapal penyelamat diperlukan adanya akses berupa pegangan dan pijakan yang dipasang di sisi kiri dan kanan pada kapal pencari korban kecelakaan autokendali (iboat).
Inovasi ini melihat celah pada uji coba kapal tersebut, terlihat korban mengalami kesulitan untuk dapat naik ke atas badan kapal. Sehinggga desain penambahan pijakan dan pegangan sebagai akses ini dapat mempermudah korban naik tanpa bantuan kru. Material pegangan dan pijakan direncanakan menggunakan bahan stainless steel dengan diameter 1 inch untuk pijakan. Pijakan dipasang pada bagian sisi portside dan starboard kapal. Pegangan dan pijakan dipasang dibawah garis air sehingga korban mudah untuk meraihnya.
Gambar 2. 18. Gambar pijakan tampak samping
Gambar 2. 19. Gambar pijakan tampak atas
2.7. Penambahan pegangan dan pijakan sebagai akses korban dilaut
Rescue Boat merupakan kapal yang berfungsi untuk mencari dan menolong serta mengangkut orang yang mengalami kecelakaan di laut. Kapal tipe ini terdiri dari beberapa kelas yang dibagi berdasarkan ukurannya. Ukuran terkecil dapat mencapai kurang dari 10 meter panjangnya. Rescue boat dengan ukuran kecil biasanya hanya mampu mengangkut orang sampai dengan 5 orang. Bahan dari lambung rescue boat juga bermacam-macam, dapat dibuat dari karet, baja, fiberglass, maupun aluminium.
Seiring berkembangnya ilmu dan teknologi, telah banyak diciptkaan kapal yang beroperasi otomatis, tanpa awak, ataupun dioperasikan dengan kontrol dari jarak jauh, termasuk kapal tipe
lingkungan tertentu, ini akan sangat merugikan ketika kapal yang dioperasikan otomatis namun justru terbalik dan tenggelam tanpa ada yang mengawaki kapal tersebut. Dari permasalahan tersebut maka ditawarkan sebuah pilihan untuk menambahkan alat yang dapat mengembalikan posisi rescue boat yang terbalik ke kondisi normal sehingga tetap dapat beroperasi secara otomatis atau dikontrol dari jarak jauh.
Gambar 2. 20. Letak pelampung hidrolis
Prinsip kerja pelampung ini memberikan dorongan pada kapal ketika kapal terbalik. Pelampung akan terbuka dengan sistem hidrolis sehingga kapal mendapatkan gaya angkat tambahan dari pelampung. Dengan membuka kejut pada bagian pelampung tersebut diharapkan mampu mengembalikan kapal pada kondisi semula.
BAB III STATUS LUARAN
Sesuai dengan ketentuan yang telah ditetapkan progress target luaran pada penelitian ini dapat dilihat pada Tabel 3.1.Status luaran tersebut didukung dengan bukti kemajuan ketercapaian luaran pada bagian Lampiran.
Tabel 3. 1 Status Luaran
No. Deskripsi Luaran Progress Status
1
Produk unggulan ITS yang dipatenkan (paten 1):
Penambahan Pegangan dan Pijakan di Sisi Kiri dan Kanan pada Kapal Pencari Korban
Kecelakaan Autokendali (Iboat) sebagai Akses Korban di Laut
Dalam proses
pengajuan Submitted
2
Produk unggulan ITS yang dipatenkan (paten 2):
Pelampung dengan Sistem Hidrolik Otomatis untuk Mengembalikan Rescue Boat (panjang < 10 meter) yang Terbalik ke Kondisi Normal
Dalam proses
BAB IV PERAN MITRA
Adapun beberapa Kerjasama yang telah dilakukan oleh mitra sebagai berikut:
▪ Kerjasama fabrikasi oleh galangan Gapura dan BTS di Madura dalam bentuk pengelasan dan riset bersama untuk ukuran lambung kapal pertama sebagai referensi desain kapal pembanding
▪ Kerjasama diberikan oleh jotun sebagai pihak penyedia untuk melakukan coating pada kapal autonomous rescue boat
BAB V KENDALA PELAKSANAAN PENELITIAN
Sesuai dengan ketentuan yang telah ditetapka progress target luaran pada penelitian ini dapat dilihat pada Tabel 3.2.
Tabel 3. 2 Kendala dan solusi penelitian
No. Kendala Solusi
1 Diperlukan analisis lebih lanjut untuk memilih material yang ditentukan
Material ditentukan berdasarkan mill certificate material untuk memilih jenis material pada lambung kapal
2
Diperlukan analisis lebih lanjut memperhitungkan proses fabrikasi dan produksi
Dilakukan penjadwalan dengan jadwal yang ketat dan terkontrol untuk mitigasi keterlambatan produksi lambung
BAB VI RENCANA TINDAK LANJUT PENELITIAN
Berdasarkan hasil yang diperoleh dari penelitian ini ada pengembangan yang masih dapat dilakukan untuk mendapatkan produk lambung dan proses fabrikasi yang lebih cepat untuk dibuat produk masal. Pengembangan penggunaan material pendukung seperti misalnya adalah HDPE untuk mendapatkan efisiensi cost production dan peningkatan keselamatan dan kenyamanan dengan ditambahkan pijakan untuk akses korban ke atas kapal, pijakan ini akan memudahkan korban sehingga korban dapat lebih mudah naik ke atas lambung kapal. Kapal rescue selain itu membutuhkan tingkat keamanan yang tinggi, peningkatan keamanan pada kapal rescue ini ditambahkan pelampung dengan sistem hidrolis otomatis untuk mengembalikan lambung kapal yang terbalik pada kondisi semula. Dengan penambahan pijakan dan pelampung ini merupakan inovasi untuk meningkatkan kemudahan akses bagi korban dan peningkatan segi kemanan kapal mengingat semua sistem pada kapal menggunakan unmanned sehingga diperlukan sistem keselamatan mandiri dari kapal tersebut sehingga kapal dapat berjalan beroperasi dengan baik.BAB VII DAFTAR PUSTAKA
[1] H. Schneekluth and V. Bertram, Ship Design for Efficiency and Economy, Oxford: Butterworth-Heinemann, 1998.
[2] D. Hardianto and W. D. Aryawan, "Pembuatan Konsep Desain Unmanned Surface Vehicle (USV) untuk Monitoring Wilayah Perairan Indonesia," Jurnal Teknik ITS, vol. VI, no. 2, pp. G65-G71, 2017.
[3] L. P. Perera, "Industrial IoT to Predictive Analytics: A Reverse Engineering Approach from Shipping," in In Proceedings of the 3rd Norwegian Big Data Symposium (NOBIDS), Trondheim, Norway, 2017.
[4] BKI, Rules for Small Vessel Up to 24 m, Jakarta: Biro Klasifikasi Indonesia Head Office, 2013.
[5] IMO, Intact Stability Code. Assembly Res. A. 749, London: International Maritime Organization, 2008.
[6] Hasanudin, T. Yulianto and R. C. Ariesta, "Modifikasi Kapal Purse Seine 30 GT dengan Menambahkan Cadik untuk Meningkatkan Survival of Intact Stability," Marine Fisheries, vol. 10, no. 2, pp. 205-213, 2019.
[7] D. L. Logan, A First Course in the Finite Element Method, Fourth Edition, Kanada: Thomson, 2007.
[8] S. Ilmiah and A. Zubaydi, "Analisis Tegangan Lambung Kapal Tanker Akibat Tubrukan,"
JURNAL TEKNIK ITS, vol. VIII, no. 2, pp. G180-G187, 2019.
[9] M. Kang, J. Seo and H. Chung, "Ship block assembly sequence planning considering productivity and welding deformation," International Journal of Naval Architecture and
Ocean Engineering, vol. X, no. 4, pp. 450-457, 2018.
[10] S. I. Wahidi, V. Virmansyah and T. Pribadi, "Study on Implementation of Activity Based Costing (ABC) System on Determination of Indirect Costs in Ship Production," Jurnal Ilmu
BAB VIII LAMPIRAN
Lampiran 1. Perhitungan BeratPlate Data Maxsurf Structure
Name of part Assembly Qty Material Type Area (m^2) Perimeter Weight (ton) CG. Longpos (m) CG Offset (m) CG Height
Collar_Outside_Upper 1-Collar 2 Aluminium 5083-H116 1.705 10.508 0.027 2.267 0.755 0.736
Collar_Inside_Upper 1-Collar 2 Aluminium 5083-H116 1.525 9.743 0.024 2.035 0.517 0.719
Collar_Inside_Bottom 1-Collar 2 Aluminium 5083-H116 1.628 9.872 0.026 1.913 0.519 0.42
Collar_Ouside_Bottom 1-Collar 2 Aluminium 5083-H116 1.817 10.636 0.029 2.147 0.76 0.443
Hull_Bottom 2-Hull 2 Aluminium 5083-H116 2.38 8.731 0.038 1.951 0.284 0.213
Transom_Hull 2-Hull 2 Aluminium 5083-H116 0.331 2.752 0.005 0.15 0.265 0.462
Transom_Hull 2-Hull 2 Aluminium 5083-H116 0.331 2.752 0.005 0.15 0.265 0.462
Transom_Tube 2-Hull 2 Aluminium 5083-H116 0.265 1.876 0.004 -0.201 0.75 0.527
Deck 2-Hull 2 Aluminium 5083-H116 1.751 8.159 0.028 1.823 0.25 0.45
Front_Cover 2-Hull 2 Aluminium 5083-H116 0.502 3.035 0.008 3.581 0.274 1.051
Total 24.469 136.13 0.386 1.934 0 0.499
Pendekatan Modeler Sinkage Ship WSA x Massa Jenis Alumunium
WSA = 23.807 m^2 Alumunium = 2698 Berat = 0.375753 ton 375.75 kg Deviasi Hitungan 2.65% Frame Data
No. Frame A Volume Berat (kg) Berat (ton) LCG (m) VCG (m) TCG (m)
1 1 0.701 0.00410085 11.0640933 0.011064093 0.66 0.2473 0 2 2 0.6998 0.00409383 11.04515334 0.011045153 1.26 0.2506 0 3 3 0.6814 0.00398619 10.75474062 0.010754741 1.86 0.2654 0 4 4 0.6516 0.00381186 10.28439828 0.010284398 2.46 0.2723 0 5 5 0.5666 0.00331461 8.94281778 0.008942818 3.06 0.2497 0 6 6 0.4048 0.00236808 6.38907984 0.00638908 3.66 0.2004 0 58.48028316 0.058480283 12.96 1.4857 0 Frame LCG 0.221613 VCG 0.025405
Lampiran 3. Draft Paten (1)
Deskripsi
PENAMBAHAN PEGANGAN DAN PIJAKAN DI SISI KIRI DAN KANAN PADA KAPAL PENCARI KORBAN KECELAKAAN AUTOKENDALI (IBOAT) SEBAGAI AKSES KORBAN DI LAUT
Bidang Teknik Invensi
Invensi ini mengenai penambahan pegangan dan pijakan pada sisi kiri dan kanan pada kapal pencari korban kecelakaan (iboat) sebagai akses korban di laut. Lebih khusus lagi, invensi ini berhubungan dengan pembuatan kapal pencari korban kecelakaan autokendali (iboat) untuk mempermudah korban menyelamatkan diri tanpa bantuan awak kapal.
Latar Belakang Invensi
kapal pencari korban kecelakaan adalah salah satu jenis kapal yang digunakan sebagai sarana pencarian korban yang mengapung di atas permukaan laut. Ukuran dari kapal ini tidak terlalu besar, sehingga dapat digunakan sewaktu-waktu dalam keadaan darurat. Kapal ini biasa dibawa atau diangkut oleh kapal yang berukuran lebih besar yang mempunyai potensi terhadap kecelakaan di laut.
Sistem autokendali pada kapal tipe kapal penyelamat, dibuat untuk mempermudah pengoperasian kapal, bahkan tidak perlu adanya operator atau kru pada kapal tersebut. Sehingga pada aplikasinya, kapal tersebut akan beroperasi mencari korban tanpa dikendalikan oleh operator atau kru kapal. Oleh sebab itu, untuk memudahkan korban memindahkan diri dari permukaan laut ke atas kapal penyelamat diperlukan adanya akses berupa pegangan dan pijakan yang dipasang di sisi kiri dan kanan pada kapal pencari korban kecelakaan autokendali (iboat).
Uraian Singkat Invensi
Invensi ini merupakan inovasi pada Penambahan alat pegangan pada kapal pencari korban kecelakaan autokendali yang telah diujicobakan sebelumnya. Pada pelaksanaan uji coba tersebut, korban yang akan diselamatkan mengalami kesulitan dalam memindahkan diri dari permukaan air laut ke atas kapal. Sehingga dengan penambahan pegangan dan pijakan sebagai akses,
dapat mempermudah korban menaiki kapal tanpa bantuan operator atau kru.
Uraian Singkat Gambar
Gambar 1, adalah gambar tampak atas kapal search and rescue
autonomous boat (iboat) yang telah dilengkapi dengan pegangan
dan pijakan pada sisi kapal.
Gambar 2, adalah gambar tampak samping kapal search and rescue
autonomous boat (iboat) yang telah dilengkapi dengan pegangan
dan pijakan pada sisi kapal.
Gambar 3, adalah gambar tampak depan kapal search and rescue
autonomous boat (iboat) yang telah dilengkapi dengan pegangan
dan pijakan pada sisi kapal. Uraian Lengkap Invensi
Invensi ini akan secara lengkap diuraikan dengan mengacu kepada gambar-gambar yang menyertainya.
Mengacu pada Gambar 1, yang memperlihatkan gambar detail tampak depan secara lengkap penambahan pegangan dan pijakan pada sisi kiri dan kanan pada kapal pencari korba kecelakaan autokendali yang dipasang pada bagian atas hingga sebelum garis sarat air, yang terdiri dari pipa dengan bahan stainless steel, aluminium, dan lain-lain dengan diameter 1 inch untuk pegangan dan pijakan. Mengacu pada Gambar 2, yang memperlihatkan gambar detail tampak samping secara lengkap penambahan pegangan dan pijakan pada sisi portside dan starboardside pada search and rescue
autonomous boat (iboat) yang dipasang pada bagian atas hingga
sebelum garis sarat air, yang terdiri dari pipa dengan bahan
stainless steel, aluminium, dll dengan diamter 1 inch untuk
pegangan dan pijakan.
Mengacu pada Gambar 3, yang memperlihatkan gambar detail tampak atas secara lengkap penambahan pegangan dan pijakan pada sisi
portside dan starboardside pada search and rescue autonomous boat (iboat),yang terdiri dari pipa dengan bahan stainless steel, aluminium, dll dengan diamter 1 inch untuk pegangan dan
pijakan.
Mengacu pada gambar 1 hingga gambar 3 pegangan dan pijakan untuk korban dipasang pada sisi portside dan starboardside dengan bahan pipa stainless steel, aluminium, dll dengan diamter 1 inch. Pipa pegangan dipasang secara melintang kapal pada sisi atas perahu karet hingga tepat diatas garis sarat
air. Pipa pijakan dipasang secara memanjang kapal pada posisi diatas garis air.
Dari uraian diatas jelas bahwa hasil dari invensi ini dapat memberi manfaat bagi penyempurnaan desain search and rescue
autonomous boat (iboat). Dengan adanya penambahan pegangan dan
pijakan ini, korban yang berada di laut dapat lebih mudah memindahkan diri ke dalam perahu penyelamat tanpa bantuan operator atau kru. Dan invensi ini benar-benar menyajikan suatu penyempurnaan yang sangat praktis khususnya pada pengembangan desain search and rescue autonomous boat (iboat).
Klaim
Pegangan dan pijakan merupakan tambahan pada kapal search and
rescue autonomous boat (iboat) untuk membantu korban yang
berada di laut agar dapat lebih mudah memindahkan diri ke dalam perahu penyelamat tanpa bantuan operator atau kru. Dalam paten ini di klaim pemasangan pegangan dan pijakan adalah sebagai berikut
1. Suatu pegangan dan pijakan di sisi portside dan starboardside pada search and rescue autonomous boat (iboat) terdiri dari pipa berbahan aluminium, stainless steel, dll berdiameter 1 inch.
2. Pegangan dan pijakan dipasang pada daerah midhsip dan
parallel middle body yang dipasang pada bibir kapal hingga
diatas sarat air kapal.
3. Pegangan dan pijakan dipasang pada kedua sisi portside dan starboardside.
Abstrak
PENAMBAHAN PEGANGAN DAN PIJAKAN DI SISI KIRI DAN KANAN PADA KAPAL PENCARI KORBAN KECELAKAAN AUTOKENDALI (IBOAT) SEBAGAI
AKSES KORBAN DI LAUT
Invensi ini mengenai penambahan pegangan dan pijakan pada sisi kiri dan kanan pada kapal pencari korban kecelakaan autokendali sebagai akses korban di laut. Lebih khusus lagi, invensi ini berhubungan dengan pembuatan akses pada kapal pencari korban kecelakaan autokendali untuk mempermudah korban menyelamatkan diri tanpa bantuan awak kapal.
Invensi ini merupakan inovasi pada desain kapal kapal pencari korban kecelakaan autokendali yang telah diujicobakan sebelumnya. Pada pelaksanaan uji coba tersebut, korban yang akan diselamatkan mengalami kesulitan dalam memindahkan diri dari permukaan air laut ke atas kapal. Pegangan dan pijakan di sisi kiri dan kanan pada kapal pencari korban kecelakaan autokendali yang terdiri dari pipa berbahan aluminium, stainless steel, dan lain-lain berdiameter 1 inch. Akses ini dipasang pada daerah midhsip dan parallel middle body yang dipasang pada bibir kapal hingga diatas sarat air kapal.
Gambar 1.
Gambar 2.
Gambar 3. 2
Lampiran 4. Draft Paten (2)
Deskripsi
PELAMPUNG DENGAN SISTEM HIDROLIK OTOMATIS UNTUK MENGEMBALIKAN RESCUE BOAT (PANJANG < 10 METER) YANG TERBALIK KE KONDISI NORMAL Bidang Teknik Invensi
Invensi ini berhubungan dengan alat untuk mengembalikan posisi lambung rescue boat, dengan panjang kurang dari 10 meter, yang terbalik ke kondisi normal. Alat tersebut berupa pelampung yang dipasang pada konstruksi hidrolik yang dilengkapi dengan sistem otomatis untuk mendeteksi posisi lambung kapal jika terbalik.
Latar Belakang Invensi
Rescue Boat merupakan kapal yang berfungsi untuk mencari dan menolong serta mengangkut orang yang mengalami kecelakaan di laut. Kapal tipe ini terdiri dari beberapa kelas yang dibagi berdasarkan ukurannya. Ukuran terkecil dapat mencapai kurang dari 10 meter panjangnya. Rescue boat dengan ukuran kecil biasanya hanya mampu mengangkut orang sampai dengan 5 orang. Bahan dari lambung rescue boat juga bermacam-macam, dapat dibuat dari karet, baja, fiberglass, maupun aluminium.
Seiring berkembangnya ilmu dan teknologi, telah banyak diciptkaan kapal yang beroperasi otomatis, tanpa awak, ataupun dioperasikan dengan kontrol dari jarak jauh, termasuk kapal tipe rescue boat. Rescue boat yang berukuran kecil cukup rawan terbalik akibat gelombang atau kondisi lingkungan tertentu, ini akan sangat merugikan ketika kapal yang dioperasikan otomatis namun justru terbalik dan tenggelam tanpa ada yang mengawaki kapal tersebut. Dari permasalahan tersebut maka ditawarkan sebuah pilihan untuk menambahkan alat yang dapat mengembalikan posisi rescue boat yang terbalik ke kondisi normal sehingga tetap dapat beroperasi secara otomatis atau dikontrol dari jarak jauh.
Ringkasan Invensi
Rescue boat tanpa awak dengan ukuran panjang dibawah 10 meter rawan terbalik akibat gelombang atau cuaca laut yang ekstrim. Pelampung hirolik dengan sistem otomatis diklaim dapat mengembalikan posisi lambung rescue boat yang terbalik ke kondisi normal sehingga tetap dapat beroperasi dalam cuaca ektrim di laut.
Uraian Singkat Gambar
Gambar 1 adalah tampak atas, tampak samping dan tampak depan dari sebuah rescue boat dengan dilengkapi pelampung (1) dengan
Gambar 2 adalah posisi ketika rescue boat terbalik, secara otomatis sistem hidrolik (1) mendorong kerangka konstruksi (2) dan pelampung (3) pada posisi turun ke bawah, sehingga mendapatkan gaya tekan ke atas dari air.
Gambar 3 adalah gambaran posisi rescue boat dalam proses Kembali dari posisi terbalik.
Uraian Lengkap Invensi
Invensi yang diajukan adalah pemasangan sebuah pelampung pada kerangka konstruksi yang dilengkapi dengan sistem hidrolik pada lambung kapal rescue boat berukuran di bawah 10 meter yang difungsikan untuk mengembalikan posisi lambung kapal ke kondisi normal jika lambung kapal terbalik akibat kondisi lingkungan saat operasi di laut. Rescue boat yang dimaksud adalah rescue boat yang dioperasikan secara otomatis dari jarak jauh atau tanpa awak.
Pada saat lambung rescue boat terbalik, maka sensor akan memacu pompa hidrolik untuk menekan kerangka konstruksi kea rah bawah, sehingga posisi pelampung semakin masuk ke dalam air. Gaya tekan ke atas yang diterima pelampung yang letaknya condong ke salah satu sisi kapal, akan menekan lambung kapal untuk berputar, sehingga kapal akan mempunyai momen pengembali akibat bergesernya letak titik apung. Ketika momen pengembali sudah cukup maka lambung kapal akan Kembali ke kondisi normal. Dari kondisi semula yang terbalik.
Kerangka konstruksi penyangga pelampung dan hidrolik, harus dibuat dengan material yang seringan mungkin, namun tetap memiliki kekuatan untuk menahan gaya tekan ke atas yang diterima oleh pelampung. Begitu juga dengan pelampung, harus memiliki volume yang cukup untuk menggeser titik pusat gaya tekan ke atas oleh air, sehingga mampu menghasilkan momen pengembali untuk membalikkan lambung kapal ke kondisi normal.
Klaim
Penambahan pelampung dengan sistem hidrolik otomatis, dapat memberikan manfaat untuk kapal kecil seperti rescue boat. Dalam paten ini di klaim pemasangan pelampung dengan sistem hidrolik otomatis pada rescue boat sebagai berikut:
Sistem hidrolik yang dilengkapi dengan sistem pendetaksi otomatis bekerja saat lambung kapal terbalik.
Posisi pelampung yang terletak di salah satu sisi lambung
rescue boat ketika didorong kebawah oleh sistem hidrolik maka
dapat mengembalikan lambung yang terbalik.
Konstruksi dari sistem pelampung hidrolik harus seringan mungkin, namun tetap harus kuat menahan beban dari gaya angkat pelampung.
Abstrak
PELAMPUNG DENGAN SISTEM HIDROLIK OTOMATIS UNTUK MENGEMBALIKAN RESCUE BOAT (PANJANG < 10 METER) YANG TERBALIK KE KONDISI NORMAL
Rescue Boat merupakan kapal yang berfungsi untuk menolong dan mengangkut orang yang mengalami kecelakaan di laut. Terdapat berbagai macam ukuran rescue boat, dari yang besar maupun yang kecil dengan panjang di bawah 10 meter. Inovasi terbaru dari rescue boat yaitu rescue boat yang dioperasikan tanpa awak atau dalam kata lain otomatis atau dioperasikan dari jarak jauh. Kapal dengan ukuran kecil seperti rescue boat ini sangat mudah terbalik akibat gelombang laut, apalagi ketika tidak ada awak kapal yang menangani langsung di kapal tersebut. Pelampung dengan sistem hidrolik otomatis ditawarkan untuk memberikan solusi saat lambung rescue boat terbalik akibat cuaca tak terduga di laut. Ketika rescue boat terbalik, maka sistem hidrolik akan mendorong pelampung kearah bawah sehingga menambah gaya apung pada salah satu sisi rescue boat. Ketika rescue boat sudah memiliki momen pengembali akibat bergesernya titik berat dan titik gaya angkat air, maka lambung rescue boat akan kembali ke kondisi normal.
Gambar 1.
Gambar 2.
LAMPIRAN 1 Tabel Daftar Luaran
Program : Penelitian Unggulan ITS
Nama Ketua Tim : Prof. Ir. Achmad Zubaydi, M.Eng., Ph.D.
Judul : Pengembangan Search And Rescue Boat (Iboat):
Struktur Desain Dan Strategi Produksi
1.Artikel Jurnal
No Judul Artikel Nama Jurnal Status Kemajuan*)
1
*) Status kemajuan: Persiapan, submitted, under review, accepted, published 2. Artikel Konferensi
No Judul Artikel Nama Konferensi (Nama
Penyelenggara, Tempat, Tanggal)
Status Kemajuan*)
1
*) Status kemajuan: Persiapan, submitted, under review, accepted, presented 3. Paten
No Judul Usulan Paten Status Kemajuan
1 Penambahan Pegangan Dan Pijakan Di Sisi Kiri Dan Kanan Pada Kapal Pencari Korban Kecelakaan Autokendali (Iboat) Sebagai Akses Korban Di Laut
submitted
2 Pelampung Dengan Sistem Hidrolik Otomatis Untuk Mengembalikan Rescue Boat (Panjang < 10 Meter) Yang Terbalik Ke Kondisi Normal
submitted
*) Status kemajuan: Persiapan, submitted, under review 4. Buku
No Judul Buku (Rencana) Penerbit Status Kemajuan*)
*) Status kemajuan: Persiapan, under review, published 5. Hasil Lain
No Nama Output Detail Output Status Kemajuan*)
6. Disertasi/Tesis/Tugas Akhir/PKM yang dihasilkan
No Nama Mahasiswa NRP Judul Status*)

![Tabel 2. 1. Perhitungan pembebanan pada lambung [4].](https://thumb-ap.123doks.com/thumbv2/123dok/4505367.3261336/10.893.140.792.481.668/tabel-perhitungan-pembebanan-pada-lambung.webp)