PROPOSAL
PENELITIAN UNGGULAN TERAPAN ITS
DANA ITS TAHUN 2020
User Interface (UX) dan Remote Command Control
untuk Platform Mobil Otonomous
Tim Peneliti:
Dr. Ir. Endroyono, DEA (Manager Kawasan Inovasi TIK & Robotika ITS) Cand Dr. Muhtadin, ST. MT (DepartemenT. Komputer/FTEIC/ITS)
Dr. Hendra Kusuma (Departemen Teknik Elektro/FTEIC/ITS) Cand Dr. Michael Ardhita, ST. MT ((Mahasiswa S3/FTEIC/ITS)
VITO Rahmaditya (Mahasiswa S1/DTE//FTEIC/ITS) Firza Erian Nadza (Mahasiswa S1/DTE/ /FTEIC/ITS)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA 2020
D
DAFTAR ISI
HALAMAN SAMPUL ………. i
DAFTAR ISI ………. ii
DAFTAR TABEL ……… iii
DAFTAR GAMBAR ……… iv
DAFTAR LAMPIRAN ……… v
BAB I. RINGKASAN ……… 1
BAB II LATAR BELAKANG ……… 2 BAB III. TINJAUAN PUSTAKA ……… 4
III.1 Roadmap Pengembangan Autonomous Vehicle dan ITS ……… 4
III.2 PROTOCOL & USER INTERFACE ……… 5
BAB IV METODE ……….. 8
BAB V JADWAL ………. 11
BAB VI DAFTAR PUSTAKA ……….. 13 BAB VII LAMPIRAN ……….. 14
DAFTAR TABEL
Tabel 1: Kebutuhan Anggaran Total Pengembangan Elektronika 12
DAFTAR GAMBAR
Gambar 1. Dua disain awal iCAR ITS atau AVITS (Autonomous Vehicle ITS) 3 Gambar 2. Roadmap Pengembangan Autonomous Vehicle dan ITS 5 Gambar 3. Protokol Konektifitas autonomous vehicle dengan Jaringan Eksternal 6
Gambar 4. Hubungan antar Node dan Stasiun 7
Gambar 5. Detail Protocol Layer 7
Gambar 6 Alur Proses Penelitian 8
Gambar 7. User Interface sebagai bagian dari Autonomous Vehicle 9 Gambar 8. User Interface vs Taksonomi Automated Driving 9
Gambar 9 Metode Pengembangan IX dan UX 10
DAFTAR LAMPIRAN
Lampiran 1: Biodata Tim Peneliti 14
Lampiran 2: SURAT PERNYATAAN KESEDIAAN MITRA 18
BAB I. RINGKASAN
Judul:
User Interface (UX) dan Remote Command Control untuk Platform Mobil Otonomous
Presiden Jokowi, [CNBC, 2020] mempunyai mimpi merealisasikan ibukota negara baru modern yang salah satunya ditandai dengan sistem transportasi massal yang automous. Dengan tujuan efisiensi, presiden berharap diterapkannya teknologi ART (Autonomous Rail Rapid Transit), hingga electric vehicle yang otonomous untuk angkutan umum (BUS) dan angkutan pribadi.
ITS sebagai salah satu perguruan tinggi unggul, telah mendapat mandat dari pemerintah melalui BRIN untuk mengembangkan kendaraan listrik dan otonomous dalam rangka melanjutkan pengembangan mobil listrik ITS, yang selama ini dilakukan melalui PUI SKO dan Kawasan Inovasi Otomotif. Melalui sinergi antar laboratorium, Pusat Penelitian, Pusat Kajian dan Kawasan Sains dan Teknologi yang ada, ITS bertekat mewujudkan produk rujukan mobil otonomous nasional mulai dari aspek disain platform, sistem penggerak dan kestabilan kendaraan, sistem navigasi dan keselamatan, sistem komunikasi hingga sistem aplikasi pengguna dan pengendalian jarak-jauh, melalui produk Flag-ship PRN iCAR dan iBoat. Dari berbagai aspek yang dikembangkan oleh Team Otonomous Vehicle ITS, proposal ini mengusulkan satu aspek penting, yaitu terkait “user interface yang menjalankan fungsi aplikasi pengguna dan pengendalian jarak jauh”. Sebagai bagian ekosistem elektronik yang melibatkan teknologi informasi, akses nirkabel dan IoT, maka sistem harus dirancang untuk tidak melanggar peraturan (regulasi), tidak bertentangan dengan standard-standard (protokol dan interface) yang berlaku, serta memanfaatkan teknologi yang paling tepat untuk memperoleh hasil sistem yang optimal, efektif dan efisien.
Dengan demikian, maka melalui penelitian ini diharapkan akan dapat dikontribusikan hal-hal berikut:
• Kontribusi model dan metode operasional dari sebuah sistem autonomous vehicle (AV) dengan memperhatikan proses bisnis, regulasi dan teknologi; khususnya untuk aplikasi diIndonesia, dengan ITS sebagai area prototyping.
• Adanya prototype aplikasi melalui “aplikasi smart-phone dan program aplikasi lain” yang memungkinkan protoype AV dapat melayani permintaan pengguna melalui user interface yang dirancang khusus agar memungkinkan sistem dikendalikan secara on-demand, dan memungkinkan pengambil-alihan oleh command center pada kondisi darurat. Kajian fokus terkait penerapan sistem di jaringan 5G akan menjadi bagian penting dari penelitian ini.
• Kontribusi penelitian pada kontrak kinerja ITS, yang meliputi publikasi ilmiah standard internasional, adanya prototype ITS di level nasional dan didapatkannya HKI disain maupun patent.
Dengan dukungan peneliti yang cukup kompeten di bidangnya dan dengan dukungan pendanaan yang memadai, semoga semua bisa berjalan dengan baik, mempunyai kemajuan sesuai jadwal yang ditetapkan.
BAB II LATAR BELAKANG
Presiden Jokowi, [CNBC, 2020] mempunyai mimpi merealisasikan ibukota negara baru modern yang salah satunya ditandai dengan sistem transportasi massal yang automous. Dengan tujuan efisiensi, presiden berharap diterapkannya teknologi ART (Autonomous Rail Rapid Transit), hingga electric vehicle yang otonomous untuk angkutan umum (BUS) dan angkutan pribadi.
ITS sebagai salah satu perguruan tinggi unggul, telah mendapat mandat dari pemerintah melalui BRIN untuk mengembangkan kendaraan listrik dan otonomous dalam rangka melanjutkan pengembangan mobil listrik ITS, yang selama ini dilakukan melalui PUI SKO dan Kawasan Inovasi Otomotif. Melalui sinergi antar laboratorium, Pusat Penelitian, Pusat Kajian dan Kawasan Sains dan Teknologi yang ada, ITS bertekat mewujudkan produk rujukan mobil otonomous nasional mulai dari aspek disain platform, sistem penggerak dan kestabilan kendaraan, sistem navigasi dan keselamatan, sistem komunikasi hingga sistem aplikasi pengguna dan pengendalian jarak-jauh, melalui produk Flag-ship PRN iCAR dan iBoat.
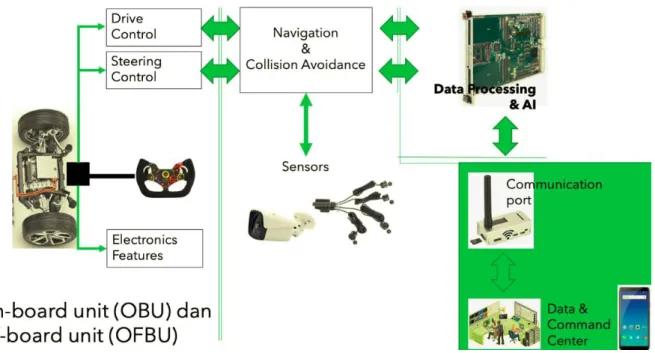
Di bidang Intelligent Transportation System, ITS telah mempunyai pengalaman yang cukup panjang melalui Laboratorium yang dipunyai, Pusat Penelitian, Pusat Kajian dan Pusat Unggulan Inovasi (PUI), termasuk yang dulakukan melalui kawasan STP. Di bidang manajemen lalu-lintas, team ITS telah berkontribusi pada penerapan pengatur lalu-lintas cerdas Surabaya (S-ITS) dan e-Tilang/ e-TLE yang menjadi percontohan di Indonesia. Pengembangan sepeda motor listrik dan mobil listrik oleh PUI SKO juga menjadi contoh kontribusi ITS di bidang transportasi elektronik. Di dunia internasional team Robot ITS atau team Autonomous ITS telah berjaya baik untuk robot Darat, robot Air maupun robot Udara; sehingga tidak ada alasan lagi bagi team ITS untuk tidak melakukan penelitian unggulan terapan yang berujung pada terciptanya autonomous vehicle yang diterapkan di darat, laut atau bahkan udara. Di tahun 2020, ITS berniat mempunyai prototype otonomous vehicle yang diperasikan di darat (iCAR) maupun yang dioperasikan di Laut (iBOAT). Kedua vehicle ini secara sistem membutuhkan platform (mobil dan kapal); sistem kontrol di kendaraan (on-board unit) yang membawa dua fungsi yakni fungsi pengendalian kendaraan (drive control & steering control) dan fungsi navigasi, termasuk fungsi pencegahan tabrakan (anti collision system); serta fungsi kendali jarak-jauh yang memungkinkan operator memonitor kondisi kendaraan dan termasuk melakukan pemanggilan secara on-line & on-demand.
Gambar 1. Dua disain awal iCAR ITS atau AVITS (Autonomous Vehicle ITS)
Untuk merealisasikan adanya kendaraan autonomous di ITS dalam waktu singkat jelas membutuhkan strategi yang tepat, diantaranya akan dilakukan dengan pengembangan secara paralel, antara platform (kendaraan dan penggeraknya) dan sistem pengendali elektronik, mekatronika hingga sistem navigasi cerdasnya.
BAB III. TINJAUAN PUSTAKA
III.1 Roadmap Pengembangan Autonomous Vehicle dan ITS [IEEE ITS Jurnals &
Magazine]
Apabila dilihat secara makro, penelitian di bidang Autonomous Vehicle selalu berawal dari proses elektrifikasi kendaraan. ITS melalui sinergi antar laboratorium, Pusat Penelitian, Pusat Kajian dan Kawasan Sains dan Teknologi telah terbukti mampu melahirkan berbagai protoype motor dan mobil listrik melalui penelitian Molina dan penelitian lain yang melibatkan departemen teknik mesin, departemen teknik elektro, departemen material dan departemen lain melalui Pusat Penelitian dan PUI terkait.
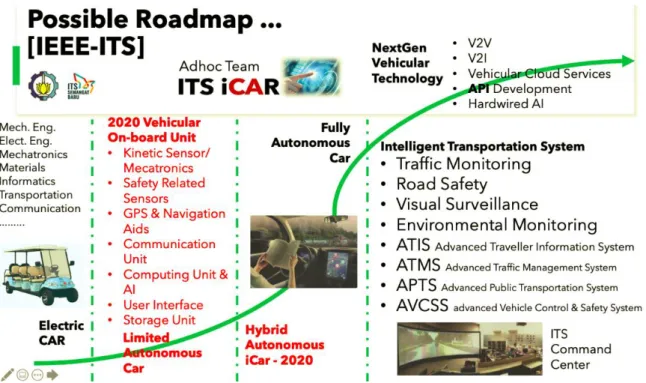
Gambar 2 memberikan gambaran sejauh mana, kendaraan listrik (electric vehicle, EV) dapat dikembangkan. Dengan potensi yang ada, ITS telah melewati tahap pertama merealisasikan prototype motor dan mobil listrik, dan bahkan sudah siap untuk dipasarkan. Maka kini saatnya ITS masuk ke tahap “mobil cerdas”, yaitu mobil yang tidak saja sudah ditenagai oleh tenaga listrik, tetapi juga sebuah mobil yang dilengkapi dengan perangkat mekatronik dengan berbagai sensor kinetik yang membuat mobil semakin nyaman dan aman dikendarai. Pada tahap berikutnya kendaraan perlu diperlengkapi dengan berbagai sensor lingkungan yang memungkinkannya untuk lebih aman, termasuk adanya anti collision system, anti tabrakan. Dalam rangka mewujudkan kendaraan yang mampu menjalani route secara otonom, maka peran GPS dan alat bantu navigasi menjadi semakin penting. Apabila dikombinasikan dengan sistem komunikasi dan pengolah informasi yang semakin cepat, maka minimal sudah akan dapat terwujud adanya satu atau dua prototype autonomous vehicle. Operasional di jalan jelas sangat tergantung pada regulasi, sehingga apakah kendaraan mau dioperasikan hybrid autonomous atau fully autonomous sangat tergantung pada regulasi.
Dengan demikian, menjadi jelas bahwa pada penelitian untuk Batch 1 tahun 2020 ini, fokus diarahkan pada aspek dasar dari sebuah kendaraan autonomous, mulai dari memahami kinetik sensor, mekatronika, sensor-sensor keselamatan, pemanfaatan GPS dan sensoe lain dalam navigasi, pengembangan unit komputer dan artificial intelligent, hingga pengembangan user
interface dan sistem memori yang memungkinkan kendaraan minimal otonomous di level 3 dan atay 4.
Gambar 2. Roadmap Pengembangan Autonomous Vehicle dan ITS
Pada tahapan selanjutnya, autonomous car hanyalah satu entitas dari lingkungan dan populasi yang besar dari autonomous vehicle. Permasalahan yang kemudian harus diselesaikan akan bagaimana antar kendaraan dapat saling berkomunikasi dan memahami (V2V), bagaimana kendaraan dapat belajar dari informasi lingkungan (V2I). Apabila V2V dan V2I sudah terealisasi dengan baik, maka aspek informasi (vehicular cloud services) dan aplikasi (pengembangan API dan hardwired AI) akan menjadi subjek penelitian yang semakin banyak. Pada akhirnya, pengembangan lingkungan berbasis kecerdasan yang harus semakin dipersiapkan dan dikembangkan dalam kerangka Inteligent Transportation System, seperti Traffic monitoring, road safety system, surveillance system, environmental monitoring, advanced traveler information system, advanced traffic managemen system, advanced public transportation system, hingga advanced vehicle control & savety system. Jelas sistem pengedalian (command center) menjadi bagian penting yang harus dikembangkan.
Tidak dapat dipungkiri, berbicara tentang autonomous di era ini, berarti juga harus berbicara tentang protocol dan interface di sisi yang lain. Sebagai contoh konektifitas sebuah mobil otonomous ke jaringan akan membutuhkan adanya komunikasi dengan dunia luar, seperti dalam rangka membentuk ITS ad hoc network, melakukan Access ke network (ITS access network, public access network, private access network) dan berkomuikasi melalui Core network (e.g. the Internet). Dengan demikian, autonomous vehicle harus dikondisikan menjadi sebuah NODE yang mempunyai hak akses ke ITS adhock network dan ITS access network untuk kemudian berkomunikasi juga ke domain eksternal seperti jairngan akses publik dan internet.
Gambar 3. Protokol Konektifitas autonomous vehicle dengan Jaringan Eksternal
Mengacu kepada protocol diatas, maka dimungkinkan dalam sistem akan ada kendaraan autonomous (vehicle station), penumpang (personal station), halte (roadside station); dan central station. Dan secara hardware, akan dibutuhkan ad hoc router; mobile router; access router; dan access network gateway. Akhirnya untuk mendukung operasional sistem otonomous, harus dirancang jaringan yang sesuai, sebagaimana contoh gambar berikut.
Gambar 4. Hubungan antar Node dan Stasiun
Hubungan antar node, secara aplikasi diatur menggunakan protocol bertingkat yang diilustrasikan sebagai gambar berikut. Dengan protocol tersebut, maka diperlukan pengembangan beberapa program dan interface, baik yang berhubungan dengan aplikasi, manajemen sistem, security, hingga interface komunikasi di lapis transport, jaringan dan akses.
Gambar 5. Detail Protocol Layer
Dengan memahami protocol dan standard interface yang dibutuhkan, maka pada penelitian ini perlu dikembangkan khusus user interface yang paling optimal untuk aplikasi autonomous vehicle yang sedang dikembangkan.
BAB IV METODE
Metode atau cara untuk mencapai tujuan yang telah ditetapkan. Bagian ini dilengkapi dengan diagram alir penelitian yang menggambarkan apa yang sudah dilaksanakan dan yang akan dikerjakan selama waktu yang diusulkan Bagan penelitian harus dibuat secara utuh dengan penahapan yang jelas, mulai dari awal bagaimana proses dan luarannya, dan indikator capaian yang ditargetkan. Di bagian ini harus juga mengisi tugas masing-masing anggota pengusul sesuai tahapan penelitian yang diusulkan.
Secara sederhana urutan proses dari penelitian ini adalah sebagai berikut.
Gambar 6 Alur Proses Penelitian
Sebelum mendetailkan metode yang digunakan, maka perlu diperjelas, bahwa judul ini adalah satu bagian dari rangkaian sub-system yang saling berhubungan dalam sebuah platform autonomous vehicle, yang terjelaskan di gambar berikut ini (bagian yang diarsir).
Gambar 7. User Interface sebagai bagian dari Autonomous Vehicle
Penelitan pendahuluan telah dilakukan melalui penelitian On-board Unit ITS [ITS 2018-2019], yang membahas tentang bagaimana disain awal untuk komunikasi antara vehicle dengan base station dapat berjalan dengan optimal. Pada dasarnya fungsi dari interface ini adalah dalam rangka menampilkan berbagai parameter dan produk aplikasi dengan melakukan pemilihan informasi mengacu pada taksonomi standard kendaraan [IEEE ITS] dan kemudian melakukan programming sesuai kebutuhan tersebut untuk membuat semua informasi menjadi user friendly.
Gambar 8. User Interface vs Taksonomi Automated Driving
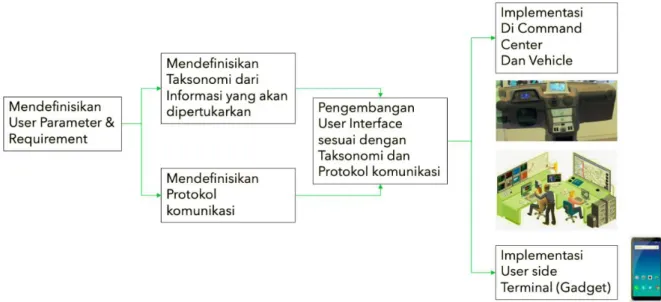
Gambar 9 Metode Pengembangan IX dan UX
Pada semua kasus kendaraan otonomus, maka pendefinisian parameter dan keinginan user menjadi bagian yang sangat penting. Dari definisi tersebut, akan dapat dilakukan pendetailan, berupa pendefinisian taksonomi informasi yang akan dipertukarkan. Dalam terminologi autonomous vehicle, terdapat beberapa kelas taksonomi, mulai yang terkait dengan data kendaraan (posisi, kondisi tenaga battery, dsb), kondisi penumpang (jumlah, ukuran, sikap, kebutuhan dan faktor resiko lain), kondisi lingkungan (posisi kendaraan di ruang, pemahaman kendaraan terhadap tanda, rambu, cuaca, dan tanda-tanda lain seperti kemacetan), serta nantinya taksonomi yang terkait dengan komunikasi antar kendaraan otonomous (V2V) dan antar kendaraan dengan lingkungan informasi (V2I). Diharapkan di tahap nerikutnya kendaran akan mempunyai kemampuan untuk mendeteksi batasan-batasan peraturan, berkomunikasi dengan traffic light adaptive dan seterusnya.
Dan dengan menetapkan taksonomi informasi yang dipertukarkan, maka dapat dilakukan pengembangan protokol komunikasi optimal untuk proses tersebut. Dengan demikian, maka langkah selanjutnya dari pengembangan user interface lebih pada aspek pemrograman dan coding. Tahap berikutnya, adalah implementasi di command center dan di kendaraan, selain implementasi di user terminal yang biasanya berupa gadget atau smart-phone.
Dengan demikian, pengembangan user interface adalah bagian akhir dari pengembangan dengan syarat, kendaraan telah dapat berjalan baik berkat sistem mekatronika yang terpasang, kendaraan telah mampu mengikuti perintah terkait route dan mampu menghindari tabrakan secara sistematis, sehingga akhirnya user tinggal memberikan perintah melalui user interface.
BAB V JADWAL
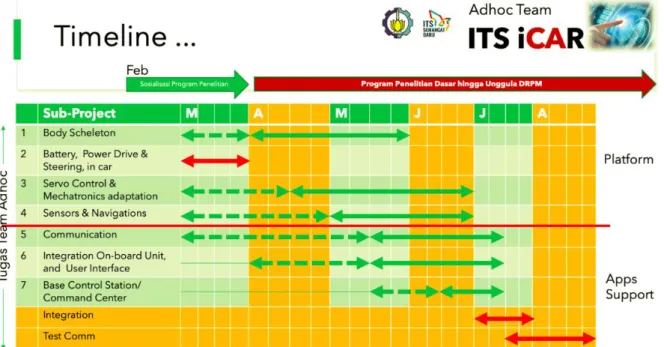
Penelitian ini, menjadi bagian dari penelitian besar, dengan jadwal sebagai berikut:
Gambar 10 Jadwal Total Penelitian
Dari jadwal diatas, terlihat bahwa pengembangan user interface baru akan dapat dilakukan secara fisik apabila telah terwujud produk dan infrastruktur dasar dari kendaraan autonomous. Pada dasarnya pengembangan User Interface akan bersamaan dengan pengembangan sistem komunikasi, integrase on-board unit dan ditutup dengan pengembangan Base Control Station atau command center.
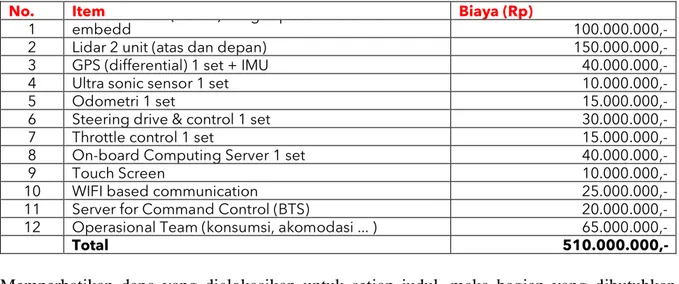
Adapun kebutuhan biaya dari pekerjaan ini adalah sebagai betiku;t Tabel 1: Kebutuhan Anggaran Total Pengembangan Elektronika
No. Item Biaya (Rp)
1 Kamera 4 unit (4 arah) - high speed – vision cam – embedd 100.000.000,- 2 Lidar 2 unit (atas dan depan) 150.000.000,- 3 GPS (differential) 1 set + IMU 40.000.000,- 4 Ultra sonic sensor 1 set 10.000.000,- 5 Odometri 1 set 15.000.000,- 6 Steering drive & control 1 set 30.000.000,- 7 Throttle control 1 set 15.000.000,- 8 On-board Computing Server 1 set 40.000.000,- 9 Touch Screen 10.000.000,- 10 WIFI based communication 25.000.000,- 11 Server for Command Control (BTS) 20.000.000,- 12 Operasional Team (konsumsi, akomodasi ... ) 65.000.000,-
Total 510.000.000,-
Memperhatikan dana yang dialokasikan untuk setiap judul, maka bagian yang dibutuhkan untuk melaksanakan judul penelitian ini adalah:
Tabel 2: Kebutuhan Khusus Pengembangan IX/UX
No. Item Biaya (Rp)
1 Touch Screen 10.000.000,- 2 WIFI based communication 25.000.000,- 3 Server for Command Control (BTS) 20.000.000,- 4 Biaya pengembangan sistem & perangkat support 55.000.000,-
BAB VI DAFTAR PUSTAKA
Daftar Pustaka disusun dan ditulis berdasarkan sistem nomor sesuai dengan urutan pengutipan. Hanya pustaka yang disitasi pada laporan kemajuan yang dicantumkan dalam Daftar Pustaka. 1. CNBC, “Autonomous Vehicle Bakal Jadi Kendaraan di Ibu Kota Baru”, CNBC Indonesia,
16 Januari 2020
2. Y Du et al., “Velocity Control strategies to improve automated vehicle driving comfort” IEEE Intelligent Transportation System, Volume 10 Number 1, 2018
3. Phillipe Xu, et al., “System Architecture for a driverless electric car in the grand cooperative driving challenge”, IEEE Intelligent Transportation System, Volume 10 Number 1, 2018
4. S. Han et al., “From software defined vehicle to self-driving vehicle: a report … “, IEEE Intelligent Transportation System, Volume 11 Number 1, 2019.
5. A. Thakur et al., “Fog Computing for detection vehicular congestion, an internet of vehicular based approach: a review”, IEEE Intelligent Transportation System, Volume 11 Number 2, 2019.
6. C Zhang, “Trayectory planning and tracking for autonomous vehicle based on state lattice and model predictive control”, IEEE Intelligent Transportation System, Volume 11 Number 2, 2019.
7. Alex Zyner et al., “ACFR Five Roundabouts Dataset: naturalistic driving at unsignalized intersection”, IEEE Intelligent Transportation System, Volume 11 Number 4, 2019
8. E. Marti et al., “A review of sensor technologies for perception in automated driving”, IEEE Intelligent Transportation System, Volume 11 Number 4, 2019.
9. J. WU, “Automated Lane identification using the roadside LIDAR Sensor”, IEEE Intelligent Transportation System, Volume 12, Number 1, 2020.
10. Z. Chen, “Building an autonomous lane keeping simulator, using real-world data and end-to-end learning”, IEEE Intelligent Transportation System, Volume 12, Number 1, 2020.
BAB VII LAMPIRAN Biodata Tim Peneliti
1. Ketua
1. Nama Lengkap : Dr. Ir. Endroyono, DEA
2. NIP/NIDN : 196504041991021001/ 0004046508 3. Fungsional/Pangkat/Gol. : Lektor/Penata/IIIC
4. Bidang Keahlian : Teknik Elektro Telekomunikasi Multimedia 5. Departemen/Fakultas : Teknik Elektro/ FTEIC
6. Alamat Rumah dan No. Telp. : Perumahan ITS Blok T/46 Keputih Sukolilo SBY Phone: 081259782001
7. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan
• “Penelitian Pengembangan Sistem Routing Multi Platform Untuk Mendukung Sistem Transportasi Publik Cerdas”, (2018), Penelitian PUPT, Sebagai Ketua • “Analisis Teknik Mitigasi Efek Distorsi Non Linier High Power Amplifier (Hpa)
Pada Sistem Mimo-GFDM”, (2019), Penelitian Pasca Sarjana Pendukung Penelitian Unggulan,Sebagai Anggota
8. Publikasi (2) yang paling relevan
• “Nonlinear Distortion Cancellation using Predistorter in MIMO-GFDM Systems”, Jurnal International Electronics (Switzerland), 2019
• “Partial Transmit Sequence and Selected Mapping Schemes for PAPR Reduction”, International Journal of Intelligent Engineering & Systems (INASS)
9. Paten (2) terakhir • Tidak ada
10. Tugas Akhir (2 terakhir yang paling relevan), Tesis (2 terakhir yang paling relevan), dan Disertasi (2 terakhir yang paling relevan) yang sudah selesai dibimbing.
• TA
o M. Suhairi, “Pengurangan kompleksitas dari Codec HEVC Multiview menggunakan FPGA”, Teknik Elektro
o Amelia Puspasari, “Analisis MISO-SISO Gain pada Platform Uji DVB-T2”, Teknik Elektro
• Thesis
o Prasetyo Yuliantoro, “Optimasi Penempatan BTS dan MCP berbasis Artificial Intelligent dengan memanfaatkan data GIS”, S2 TMM Teknik Elektro.
o Alantura Guslava, “Methode transformasi data dan prediksi statement pelaporan Audit”, S2 Telematika, Teknik Elektro
o Michael Ardhita (on-going): “Optimasi Protokol Sistem Komunikasi pada Intelligent Transportation System”, Teknik Elektro FTEIC ITS
o -
2. Anggota
2.1 Anggota : Cand Dr. Muhtadin, ST. MT (DepartemenT. Komputer/FTEIC/ITS)
1. Nama Lengkap : Muhtadin, ST. MT
2. NIP/NIDN : 1198106092009121003/ 0004046508 3. Fungsional/Pangkat/Gol. : Lektor/Penata/IIIC
4. Bidang Keahlian : Embedded System & Robotika 5. Departemen/Fakultas : Teknik Komputer/ FTEIC
6. Alamat Rumah dan No. Telp. : Sukolilo Park Regency Blok I no 14 Phone: 0031-5922936
7. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan
• Autonomous Mobile Robot Berbasis Player/Stage Menggunakan Parallel Self-Organizing Feature Maps Untuk Pemetaan Lingkungan Global Yang Tidak Diketahui
• Hardware Implementation of Stream Ciphers : Grain-128 and F-FCSR-H
8. Publikasi (2) yang paling relevan
• Rancang Bangun Omni-Directional Robot Sebagai Penjejak Trayektori Berbasis Odometri” (Rudy Dikairono, M. Fatkhulloh Ar Rohman, Tri Arief Sardjono, Muhtadin) The 3rd Indonesian Symposium on Robot Soccer, Competition (ISRC) 2015, Muhammadiyah University Yogyakarta, June 11st, 2015
• “Penerapan Algoritma Dinamik A* untuk Penentuan Jalur Mobile Robot pada Area yang Belum Diketahui” (Eko Budi U., Muhtadin, Supeno Mardi S.N, Mauridhi Hery P) The 2nd Indonesian Symposium on Robot Soccer, Competition (ISRC) 2014, ISBN 979-26-0273-9 Universitar Negeri Yogyakarta, June 24th, 2014
9. Paten (2) terakhir
• Perangkat untuk mengatur nyala lampu lalu lintas secara adaptif, Granted, No. Paten : IDP000044008, Tingkat Nasional
• Perangkat Untuk Mendeteksi dan Menghitung Kendaraan Berbasis Kamera IP, Granted, No. Paten IDP000044009, Tingkat Nasional
10. Tugas Akhir (2 terakhir yang paling relevan), Tesis (2 terakhir yang paling relevan), dan Disertasi (2 terakhir yang paling relevan) yang sudah selesai dibimbing, diwujudkan dalam publikasi Bersama (TA, Thesis dan Disertasi).
• “Ichiro Robots Winning RoboCup 2018 Humanoid TeenSize Soccer Competitions”: (Muhtadin,Muhammad Reza Arrazi,Sulaiman Ali,Tommy
Pratama,Dhany Satrio Wicaksono,Ahmad Hernando Pradanatta Putra,I. Made Pande Ari, Alfi Maulana,Oktaviansyah Purwo Bramastyo,Syifaul Qolby Asshakina,Muhammad Attamimi,Muhammad Arifin,Mauridhi Hery Purnomo,Djoko Purwanto) RoboCup 2018: RoboCup 2018: Robot World Cup XXII pp 425-435, Springer
• “Implementasi Pusat Tekanan (CoP) Untuk Kontrol Keseimbangan Postur Pada Robot Humanoid” (Muhammad Arifin, Djoko Purwanto, Muhtadin, Anas Mufid Nurrochman) 5th Indonesian Symposium on Robot Soccer Competition (ISRSC)
2017, Bandung, July 6th 2017.
• “Implementasi Model Inverted Pendulum pada Proses Akselerasi dan Deselerasi Gerakan Berjalan Robot Sepak Bola Humanoid” (Anas Mufid Nurrochman, Muhammad Arifin, Muhtadin, Djoko Purwanto) 5th Indonesian Symposium on
Robot Soccer Competition (ISRSC) 2017, Bandung, July 6th 2017.
• “ICHIRO TEAM – Team Desciption Paper” (Satria Hafizhuddin, Muhtadin, Muhammad Arifin, Muhammad Reza Ar Razi, Dhany Satrio Wicaksono, Tommy Pratama, Sulaiman Ali, Ba'Da Maulidia Rizqi Putri, Deo Alfitra Ramazhoni, Naufal Ihza Revandhika, Anas Mufid Nurrochman and Agatha Putri Adwitya) 5th
Indonesian Symposium on Robot Soccer Competition (ISRSC) 2017, Bandung, July 6th 2017.
• “Affective human pose classification from optical motion capture, (Muhtadin; Surya Sumpeno; Aang Pamuji Dyaksa) 2017 International Seminar on Intelligent Technology and Its Applications (ISITIA) doi: 10.1109/ISITIA.2017.8124095 • “Fall detector implementation in a robot service” (Muhtadin ; Arief Kurniawan ;
Anak Agung Ngurah Surya Laksamana ; I Ketut Eddy Purnama) 2017 International Seminar on Sensors, Instrumentation, Measurement and Metrology (ISSIMM) doi: 10.1109/ISSIMM.2017.8124255
2.1 Dr. Hendra Kusuma (Departemen Teknik Elektro/FTEIC/ITS)
a Nama Lengkap (dengan gelar) Dr. Ir. Hendra Kusuma, M.Eng.Sc.
b NIP/NIDN 196409021989031003/0002096405
c Fungsional/Pangkat/Gol Lektor / III D
d Bidang Keahlian Artificial Inteligent, Embedded System, IOT e Departemen/Fakultas Teknik Elektro/FTEIC
f Alamat Rumah dan No. Telp. Rungkut Mapan Selatan AI/14-15 Sby, 081330576135 g Riwayat
Penelitian/Pengabdian
1. Hibah Inovasi 2019 : “UJI PRODUKSI MESIN CETAK HURUF BRAILLE BERKECEPATAN 400 KARAKTER PER DETIK “, Anggota Tim Peneliti.
2. PPTI – 2017 : “ Pengembangan Prototipe Laik Industri Mesin Cetak Huruf Braille Berkecepatan 400 Karakter Per Detik”, Anggota Tim Peneliti h Publikasi 1. “Deep Learning Based Facial Expressions
Device for Assisting Visually Impaired Persons”, Bulletin of Electrical Engineering and Informatics 9 (3), 2020
2. “Blind People Guidance System using Stereo Camera”, International Seminar on Intelligent Technology and Its Applications, 2019
i Paten Mesin Cetak Braille, No. IDP000063834 (23 Okt 2019)
j Tugas Akhir dan Tesis 1. “PENGENALAN EKSPRESI WAJAH UNTUK TUNANETRA MENGGUNAKAN DEEP
LEARNING PADA PERANGKAT PORTABEL”, Tugas Akhir Hasby Fahrudin, September 2019 2. “Perancangan Perangkat Antarmuka Berbasis
Pengenalan Suara pada Purwarupa Mesin Cetak Huruf Braille ITS”, Tugas Akhir Nicolas Rezadhi Pradipta, Maret 2019
1. RANCANG BANGUN SISTEM PEMETAAN HALANGAN PADA RUANG SEBAGAI ALAT BANTU NAVIGASI TUNANETRA, Tesis Ichsan Pratama Adi, April 2019
2. Traffic Sign Image Recognition Using Gabor Wavelet and Principle Component Analysis, Tesis Immawan Wicaksono, September 2018
2.3 Anggota Mahasiswa
• Cand Dr. Michael Ardhita, ST. MT ((Mahasiswa S3/) • VITO Rahmaditya (Mahasiswa S1/FTEIC/ITS)
Lampiran 2. SURAT PERNYATAAN KESEDIAAN MITRA
Yang bertanda tangan di bawah ini kami: Nama Jabatan Nama Mitra
• : ...
• : ...
• : ...
menyatakan bersedia untuk melaksanakan tanggung jawab sebagai mitra penelitian: Judul Penelitian : ... Ketua Tim Peneliti : ...
Dengan memberi kontribusi in cash sebesar Rp ...
Surat pernyataan ini kami buat dengan sebenarnya untuk digunakan seperlunya. Mengetahui, Pimpinan Mitra/Instansi (...) ..., ... 20... Peneliti Mitra Materai Rp. 6.000,- (...)
Lampiran 6. KOMITMEN PENELITI MITRA PERGURUAN TINGGI
Yang bertanda tangan di bawah ini kami: Nama
NIP
Departemen / Fakultas Asal Perguruan Tinggi
• : ...
• : ...
• : ...
• : ...
menyatakan bersedia untuk melaksanakan tanggung jawab sebagai anggota tim penelitian: Judul Penelitian : ... Ketua Tim Peneliti : ...
dengan tugas: ... ... ... ... Surat pernyataan ini kami buat dengan sebenarnya untuk digunakan seperlunya. Mengetahui,
Ketua LPPM/Direktur Penelitian/DRPM Afiliasi Mitra (...)
Peneliti Mitra ..., ... 20...
Materai Rp. 6.000,-