BAB 2
LANDASAN TEORI
2.1 Teori-teori Dasar / Umum
Teori – teori dasar / umum yang akan dibahas dalam bab 2 ini adalah teori matlab dan teori motor DC yang diterapkan dalam penelitian ini.
2.1.1 MATLAB (Matrix Laboratory)
MATLAB singkatan dari MATRIK LABORATORY. Aplikasi matlab banyak digunakan dalam bidang yang membutuhkan perhitungan matematika yang rumit, dimana seluruh operasi perhitungan dalam matlab berupa operasi
matrik. Matlab dapat menampilkan hasil perhitungan dalam bentuk plot grafik
dan dapat juga dirancang mengunakan GUI ( Graphical User Interface ) yang kita rancang. Pada software MATLAB terdapat beberapa bagian penting yang digunakan dalam menjalankan program yaitu :
• Command window digunakan untuk mengetik fungsi yang diinginkan, • command history berfungsi agar fungsi yang telah digunakan sebelumnya
dapat digunakan kembali, dan
• workspace digunakan untuk membuat variabel yang ada dalam MATLAB. MATLAB dapat juga digunakan untuk melakukan pemrograman dengan menggunakan m-file, dimana cara kerja dari m-file itu sendiri sama dengan jika mengetik langsung pada command window.
2.1.2 Motor DC
Motor DC atau motor arus searah adalah salah satu penggerak utama yang sering digunakan dalam dunia industri. Motor DC lebih sering digunakan oleh orang dari pada motor ac karena karakteristik dari motor ac adalah non linier karena ada phase pada motor ac sehingga lebih sulit dalam hal analistis (Kuo, Benjamin C., 1995, ppl-124).
Teknologi motor dc pada saat ini terdiri dari bermacam-macam jenis, maka untuk dapat mengendalikan motor dc dengan baik, perlu diketahui persamaan matematika dan cara kerjanya dari motor dc itu sendiri. Pada sub bab ini akan dibahas tentang pengenalan motor dc, cara kerja dari motor dc dan persamaan matematik dari motor dc.
2.1.2.1 Cara Kerja Motor DC
Pada dasarnya motor dc merupakan sebuah transducer yang bekerja sebagai aktuator atau alat yang merespon suatu energi listrik menjadi energi mekanik, dimana kekuatan dari gaya putarnya disebut dengan torsi. Torsi yang dihasilkan berbanding lurus dengan besarnya arus pada kumparan dan berbanding lurus dengan besarnya fluks pada medan magnetik. Hubungan antara torsi yang dihasilkan, fluks bernilai konstan dan arus adalah sebagai berikut :
Keterangan :
T = torsi yang diberikan oleh motor (NM). ia = arus armature (ampere).
K = Konstanta proportional motor Ф = fluks magnetic (webers)
2.1.2.2 Persamaan Matematika Motor DC
Motor dc sering digunakan pada sistem kendali, untuk tujuan analitik, dimana diperlukan model matematis motor dc dalam penggunaan aplikasi pada sistem kendali.
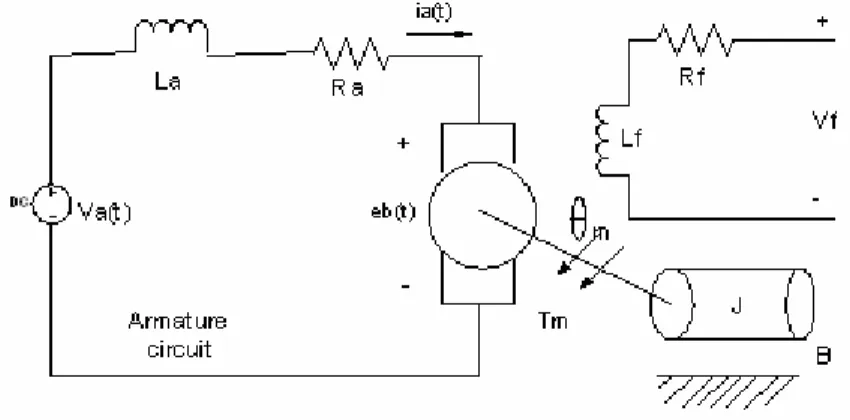
Gambar 2.1 Model motor dc yang dieksitasi terpisah
Keterangan :
Ra = tahanan armature (Ohm). La = induktansi armature (Henry). Va = Tegangan armature (Volt).
ia = arus armature (Ampere). if = arus medan magnet (Ampere). eb = gaya gerak listrik balik (Volt).
θ = perpindahan sudut dari poros motor (Radian). Tm = torsi yang diberikan oleh motor (N.M). J = momen inersia (S2/Rad)
B = koefisien gesekan viskos
Untuk fluks yang konstan, tegangan induksi eb berbanding lurus dengan kecepatan sudut dθ/dt sesuai dengan persamaan dibawah ini :
eb(t) = (t)
dt d
Kb θ dilaplace menjadi : Eb(s) = Kb.s.θ(s) ………….2.2
Persaman diferensial rangkaian kumparan magnet adalah :
Va(t) = ( ) ( ) e (t) dt t di l t i R a b a a a + + dilaplace menjadi : Va(s) = (La.s + Ra)Ia(s) +eb(S) …...2.3
Arus armature magnet menghasilkan torsi yang bekerja terhadap inersia dan gesekan maka persamaanya menjadi :
T = KaIa = dt d B dt d J 2θ2 + θ dilaplace menjadi : KaIa(s) = (J s2 + B s)θ(s) ….2.4
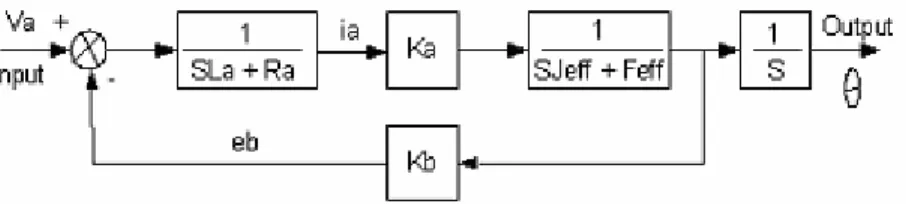
Asumsikan syarat awal = 0 dan persamaan transformasi laplace 2.2 , 2.3 , dan 2.4 dimana Va (s) adalah input dan θ (s) adalah output, sehingga blok diagram untuk motor dc dapat digambarkan sebagai berikut :
Gambar 2.2 Blok diagram motor dc
Persamaan matematika dari motor dc (dalam transformasi laplace) yang diturunkan dari gambar 2.2 yaitu :
= ) ( ) ( s V s a θ b a a a a a a k k B R B L J sR J L s s k . ) ( 2 + + + + ………2.5
Persamaan diatas merupakan pengontrolan motor DC dengan kumparan magnet pada motor yang searah dengan pengontrolan
armature magnet motor DC. Jika kumparan magnet berputar, maka
tegangan akan sebanding dengan kecepatan induksi dari kumparan magnet. Kecepatan armature magnet motor DC dikontrol oleh
tegangan kumparan magnet. Arus armature akan menghasilkan torsi yang bekerja terhadap inersia dan gesekan. Armature magnet motor DC merupakan sistem umpan balik. Induktansi dalam kumparan magnet biasanya kecil dan dapat diabaikan sehingga fungsi alih dapat menjadi : ) 1 ( ) ( ) ( + = s T s K s E s m m a θ ………..2.6 Dimana :
Km = konstanta penguatan motor Tm = konstanta waktu motor
2.2 Teori-teori Khusus yang Berhubungan dengan Topik Yang Dibahas Teori – teori khusus yang berhubungan dengan topik yang akan dibahas adalah Metode PID Controller Auto-Tuning menggunakan konsep Multiple
Integrations.
2.2.1 Jenis – jenis Sistem Kontrol
Jenis – jenis sistem kontrol terdiri dari 2 macam sistem kontrol yaitu sistem kontrol terbuka (open-loop) dan sistem kontrol tertutup (closed-loop). 1. Sistem kontrol terbuka (open-loop)
Sistem kontrol terbuka adalah sistem yang tidak memiliki umpan balik. Sistem ini terdiri dari 2 bagian kontrol dan proses yang ingin dikendalikan. Suatu sinyal masukan diberikan ke sistem kontrol dimana keluarannya bertindak sebagai sinyal penggerak dimana sinyal penggerak ini yang kemudian mengendalikan proses yang akan dikendalikan sehingga menghasilkan output yang diinginkan. Contoh pengendali dapat berupa op-amp atau transistor.
Gamabar 2.3 Sistem kontrol terbuka (open-loop)
2. Sistem kontrol tertutup (closed-loop)
Sistem kontrol tertutup (closed-loop) adalah sistem kontrol yang memiliki umpan balik, output yang dihasilkan dan sinyal input dimasukan kedalam sistem akan diselisih dimana hasil selisih dari sinyal output dengan sinyal input tersebutlah yang disebut dengan umpan balik. Sinyal error yang dihasilkan merupakan hasil dari selisih antara sinyal output dengan sinyal input atau masukan.
2.2.2 Kontroler
Kontroler digunakan sebagai komponen penambah pada suatu sistem untuk mendapatkan sinyal keluaran plant sesuai dengan sinyal setting. Salah satu kontroler adalah kontroler PID yaitu suatu sistem kontrol umpan balik atau sistem pengendali loop tertutup yang digunakan untuk memperkecil error dengan cara membandingkan error yang diinginkan dengan error yang dihasilkan. PID ( proportional-integral-derivative ) merupakan kombinasi kontroler proposional, integral dan diferensial.
2.2.2.1 Kontroler Proportional
Keluaran kontroler proposional adalah perkalian antara konstanta proposional dengan nilai error-nya. Perubahan yang terjadi pada sinyal masukan akan menyebabkan sistem secara langsung mengubah keluarannya sebesar konstanta pengalinya.
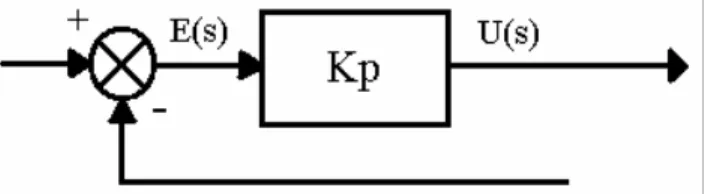
U(t) = Kp e(t)...2.7
Pada diagram blok kontroler proposional menggambarkan bahwa error merupakan selisih antara besaran yang diatur dengan besaran sebenarnya yang mempengaruhi kontroler untuk mengeluarkan output yang diinginkan.
Gambar 2.5 Diagram blok kontroler proporsional Sumber: http://www.elektroindonesia.com/elektro/tutor12.html
Efek kontroler proposional pada suatu sistem adalah sebagai berikut :
¾ Bila nilai Kp kecil maka menghasilkan respon sistem yang lambat. ¾ Bila nilai Kp besar maka sistem bekerja tidak stabil.
¾ Bila nilai Kp dinaikan maka respon sistem akan cepat mencapai keadaan stabil.
2.2.2.2 Kontroler Integral
Respon integral akan meningkat secara kontinu terus menerus kecuali error-nya adalah sama dengan 0 (nol), agar steady-state error menjadi 0 (nol). Steady-state error adalah perbedaan akhir diantara analog input atau variabel proses dan setpoint. Kejadian ini disebut hasil akhir penyelesaian dari integral dimana integral terhadap kontroler, tanpa kontroler tersebut harus menghilangkan signal error. Output dari kontroller integral sangat dipengaruhi oleh perubahan yang
sebanding dengan nilai sinyal error dimana output ini merupakan penjumlahan yang terus menerus dari perubahan masukannya. Jika
signal error tidak mengalami perubahan maka keluaran akan menjaga
agar keadaan seperti sebelum terjadinya perubahan masukan.
Keluaran kontroler integral adalah perkalian antara nilai error yang diintegralkan dengan batasan 0 sampai t dengan konstanta integral.
U(t) = Ki t∫0 e(t) dt...2.8
Fungsi alih dari kontroler integral adalah:
U(s) / E(s) = Ki / s...2.9
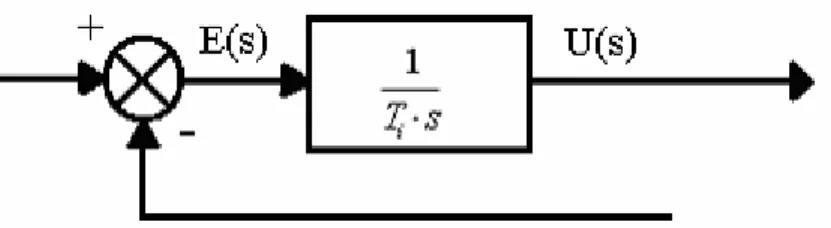
Pada diagram blok kontroler integral menunjukan hubungan antara nilai
error dengan output, kontroler integral membantu menaikan respon
sehingga menghasilkan output yang diinginkan.
Gambar 2.6 Blok diagram kontroler Integral
Sumber: http://www.elektroindonesia.com/elektro/tutor12.html
Efek kontroler integral pada suatu sistem adalah sebagai berikut : ¾ kontroler integral memperlambat respon karena output-nya
¾ Bila nilai sinyal error sama dengan nol, maka keluaran kontroler tetap seperti sebelumnya tetapi jika nilai sinyal error tidak sama dengan nol, maka output akan menghasilkan nilai yang dipengaruhi oleh nilai error dan konstanta integral.
¾ Bila nilai Ki besar, maka akan mempercepat hilangnya offset.
2.2.2.3 Kontroler Diferensial
Komponen derivatif menyebabkan output menjadi menurun jika variable prosesnya meningkat dengan cepat. Respon derivatif adalah proporsional terhadap perubahan dari input analog atau variabel proses. Dengan meningkatkan time derivative (Td) maka akan menyebabkan kontrol sistem untuk beraksi lebih kuat dalam mengubah error dan meningkatkan kecepatan dari respon kontrol sistem secara keseluruhan. Kebanyakan sistem kontrol praktis menggunakan nilai time derivative (Td) yang sangat kecil karena respon derivatif adalah sangat sensitif terhadap noise dalam sinyal variabel proses. Jika sensor sinyal umpan balik adalah noise atau jika laju perubahan adalah sangat kecil maka respon derivatif dapat membuat kontrol sistem menjadi tidak stabil.
Jika sinyal input tidak mengalami perubahan maka keluaran kontrolernya juga tidak akan mengalami perubahan sedangkan jika signal inputan-nya mengalami perubahan secara mendadak dan menaik ( berbentuk fungsi step ) maka akan menghasilkan output berbentuk impuls tetapi jika sinyal inputan-nya berubah naik secara perlahan (
fungsi ramp ) maka outputnya akan berbentuk fungsi step yang besar magnitudenya yang dipengaruhi oleh kecepatan naik dari fungsi ramp dan faktor konstanta differensialnya Td.
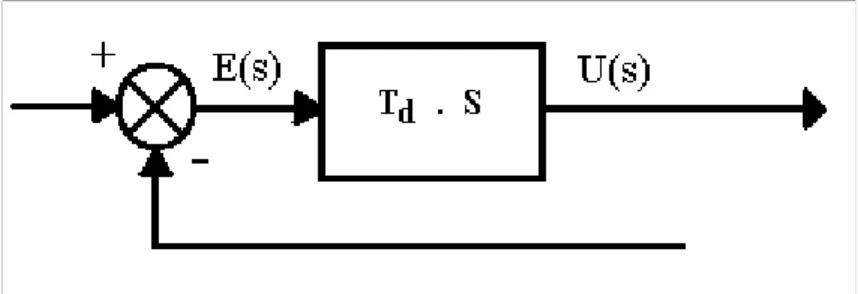
Keluaran kontroler diferensial adalah perkalian antara nilai error yang di-diferensialkan dengan konstanta diferensial.
U(t) = Kd . Td . (de(t)/ dt)...2.10
Fungsi alih dari kontroler diferensial adalah
U(s) / E(s) = Kd (Td . s)...2.11
Pada diagram blok kontroler diferensial yang menggambarkan hubungan antara sinyal error dengan keluaran kontroler.
Gambar 2.7 Blok diagram kontroler Diferensial
Sumber: http://www.elektroindonesia.com/elektro/tutor12.html
¾ Kontroler differensial tidak akan menghasilkan keluaran bila tidak ada masukannya yang berupa sinyal error
¾ Keluaran yang dihasilkan Kontroler differensial tergantung pada nilai Td dan perubahan nilai error, jika error berubah terhadap waktu.
2.2.2.4 Kontroler PID
Suatu metode sistem pengatur umpan balik ( feedback ) yang digunakan pada komponen kontroler standar di industri yang dapat bekerja secara otomatis. Komponen dengan sistem PID (
proportional-integral-derivative ) dinamakan kontroler PID.
Kontroler PID ( proportional-integral-derivative ) digunakan dalam sebuah sistem dengan loop tertutup yang dimana melibatkan umpan balik dari output sistem guna mencapai respon yang diinginkan. Sistem PID dapat mengontrol variabel inputan sistem dengan memanipulasi variabel output sistem sehingga diperoleh variabel input baru agar menghasilkan output yang sesuai.
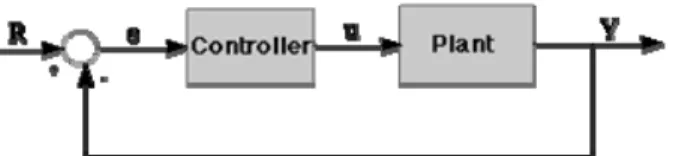
Contoh dapat dilihat dari blok diagram dibawah :
Blok diagram diatas merupakan sistem kontrol closed loop dimana kontroler bekerja sebagai penggerak plant ( objek fisik yang digerakkan dalam sistem ) dan mengontrol sifat plant. Sistem PID (
proportional-integral-derivative ) sebagai kontroler akan bekerja untuk
menggerakkan plant sebagaimana ia seharusnya menghasilkan respon yang diinginkan. Yang dikontrol oleh sistem PID adalah variabel output sistem yaitu Y. Agar diperoleh variabel Y yang sesuai maka sistem PID akan memanipulasi variabel input R. Variabel yang dimanipulasi (R baru) merupakan hasil komputasi dari variabel R, Y (feedback) dan sinyal error (e). Sinyal error ini dihasilkan oleh output Y yang dibawa dalam komponen feedback untuk dikirim ke PID kontroler sehingga dapat dijadikan pengukuran error output. Dari variabel manipulasi inilah, diperoleh output yang sesuai dengan error yang minimum.
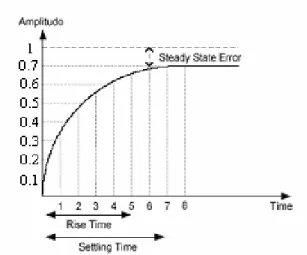
Keadaan sistem jika digambarkan ke dalam grafik :
Steady state error : merupakan variabel kemiringan dari nilai actual state (keadaan sebenarnya).
Rise time : waktu naik yang diperlukan oleh respon untuk mencapai
lebih dari nilai biasa yang didapat.
Rise time : waktu naik yang diperlukan oleh respon untuk mencapai
lebih dari nilai biasa yang didapat.
Waktu rise time diperoleh dari respon untuk naik dari 10% menjadi 90% dari nilai akhir.
Settling time : waktu yang diperlukan oleh respon untuk mencapai
setengah nilai akhir saat pertama.
Overshoot : nilai puncak respon diukur dari satuan yang menunjukkan
kestabilan relatif dari sistem.
Keluaran PID kontroler merupakan penjumlahan dari kontroler
proportional-integral-derivative, dengan menggubah konstanta proportional-integral-derivative yang akan memberikan pengaruh
terhadap respon sistem secara keseluruhan.
U(t)= [ Kp . e(t)] + [ ( Kp / Ti ).( t∫0 e(t) dt) ] + [Kp . Td . (de(t)/ dt)] ...2.12
Maka fungsi alih dari pengendalian ini adalah
PID kontroler terdiri dari 3 jenis cara pengaturan yang saling dikombinasikan, yaitu kontroler P (Proportional) , kontroler D (Derivative), dan kontroler I (Integral). Masing-masing memiliki parameter tertentu yang harus diset untuk dapat beroperasi dengan baik, yang disebut sebagai konstanta.
Diketahui konstanta Kp, Kd dan Ki yaitu :
¾ Kp berguna untuk mengurangi rise time tetapi kelemahannya sistem masih memiliki steady state error.
¾ Ki berguna untuk menghilangkan steady state error tetapi membuat respon transient menjadi kurang bagus.
¾ Kd berguna untuk menambah efek kestabilan dari sistem., mengurangi overshoot, dan memperbaiki respon transient.
Efek (karakteristik) dari perubahan parameter pada masing-masing kontroler
Parameter Rise Time Overshoot
Settling
Time Steady State Error
Proporsional Berkurang Bertambah
Sedikit
perubahan Berkurang Integral Berkurang Bertambah Bertambah Hilang
Tabel 2.1 Efek perubahan kontroller PID
2.2.3 Automatic - Tuning
Auto–tuning adalah sebuah metode dimana kontrolernya aktif secara otomatis atas permintaan dari user. Biasanya user akan menekan tombol atau mengirimkan instruksi ke kontroler untuk mengaktifkan fungsi auto-tuning.
Prosedur tuning otomatis terdiri dari 5 step yaitu 1. Mengaktifkan mode auto – tuning.
2. Pembangkitan proses gangguan. Derivative
Sedikit perubahan
3. Evaluasi dari respon gangguan. 4. Perhitungan pada parameter kontroler. 5. Memperbarui parameter kontroler.
2.3 Metode Auto-Tuning dengan Magnitude Optimum Multiple Integration
Prosedur tuning untuk kontoler PID adalah dapat diberikan dengan pendekatan fungsi alih yaitu :
sTdel n n m m r PR p e s a s a s a s b s b s b K s G − + + + + + + + + = ... 1 ... 1 ) ( 2 2 1 2 2 ...2.14
Dimana KPR adalah proses steady-state dan a1 sampai an dan b1 sampai bm adalah
parameter yang merespon dari proses fungsi alih dimana m ≤ n, dan Tdel merepresentasikan proses time delay. Parameter b1 sampai bm merupakan koefisien
numerator (pembilang) dan parameter a1 sampai an merupakan koefisien
denumerator (penyebut) dari persamaan fungsi alih sistem.
Fungsi alih dari Kontroler PID adalah :
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + = = d i sT sT K s E s U s Gc 1 1 ) ( ) ( ) ( ...2.15
Dimana U dan E adalah transformasi laplace pada kontroler output dan kontrol
error (e=w-y). Secara berurutan, parameter kontroler K (penguatan proporsional)
,Ti (konstanta waktu integral) ,Td (konstanta waktu derivatif).
Konfigurasi Kontroler PID dalam closed-loop dengan plant dimana D adalah gangguan.
Gambar 2.10 Konfigurasi PID kontroler dalam kontrol closed-loop Proses tuning diatas dilakukan untuk memperoleh sebuah kontroler yang dapat memberikan respon magnitude frekuensi dalam proses closed-loop yang setingkat dengan plant. Syarat yang diperlukan dapat diekspresikan oleh persamaan berikut :
1 ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( ≈ + = = ω ω ω ω ω ω ω j G j G j G j G j W j Y j G C P C P CL ……… 2.16
Persamaan diatas dapat dikatakan sebagai persamaan optimasi magnitude ( MO ) yang dapat memberikan respon untuk berbagai model proses kelas tinggi.
Untuk mendapatkan parameter PI dan PID kontroler berdasarkan kriteria MO, hal pertama yang harus dilakukan adalah dengan mendirikan waktu delay dalam persamaan 2.14 kedalam Taylor series :
. ! 3 ) ( ! 2 ) ( 1 3 2 ⋅⋅ ⋅ + − + − = − del del del sT sT sT sT e DEL ………..………2.17
Fungsi alih dalam sistem open-loop dapat diekspresikan sebagai berikut, dimana parameter ci dan di adalah fungsi-fungsi dari fungsi alih :
⋅⋅ ⋅ + + + + ⋅⋅ ⋅ + + + + = 4 3 3 2 2 1 0 3 3 2 2 1 0 ) ( ) ( s c s c s c s c s d s d s d d s G s GC P ………...2.18
Dimana parameter ci dan di pada 2.18 dapat dihitung dari 2.14 dan 2.15 serta 2.17
dan 2.18 ...2.19 ...2.20 ...2.21 ...2.22 ...2.23
...2.24 ...2.25 ...2.26 ...2.27 ...2.28 ...2.29 . ...2.30
atau dapat disimpulkan dengan persamaan di bawah ini :
∑
+∑
= + = − − + = − − 1 2 0 1 2 0 1 2 1 2 ( 1) 2 1 ) 1 ( n i n i n i i i n i id c cc ………...………2.31Untuk mendapatkan 3 parameter PID (K,Ti dan Td), dari ketiga persamaan (n=0...2) dalam persamaan 2.31 maka :
0 2 2 0 1 0 0 1 − + = c c d c d ...2.32 0 2 2 1 2 0 1 2 3 0 0 3 2 1 − + + − + = −d c d c d c d c c c c ...2.33 0 2 2 2 3 1 0 4 1 4 3 2 5 0 0 5 2 3 4 1 + + − − − + − + = c c c c c c d c d c d c d c d c d ...2.34
ketika persamaan 2.25 – 2.30 dimasukan kepersamaan 2.32, 2.33, 2.34 maka persamaannya menjadi :
(
i del)
PR i T b a T K T K − + − = 1 1 2 ...2.35(
)
(
)
(
)
2 2 1 2 1 1 2 2 1 1 1 1 3 1 1 2 2 2 1 1 3 3 1 2 1 1 2 2 ) ( 2 6 2 2 a a T b a T b a b a T b a T KK T b a T b a b a T b a b a b a KK T del del del d PR del del del PR i − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − − − − + + − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + − − − − + − = ... ...2.36(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + − − − − + − − − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + − − − − + − − + − + − − + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + − − − − + − − + − + − − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + − − − − + − − − + − + − + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + − − − − + − − + − + − + − − + − − = ! 3 2 2 2 2 ! 3 2 2 ! 5 ! 4 ! 3 ! 3 2 2 2 ! 3 2 2 ! 3 2 2 2 3 1 1 2 2 2 1 1 3 3 1 2 2 1 4 2 2 3 1 3 1 1 2 2 2 1 1 3 3 1 2 2 1 5 1 1 4 2 2 1 1 1 1 3 3 1 1 2 2 2 1 1 3 3 1 2 2 1 3 3 1 2 2 1 2 2 1 1 2 3 1 1 2 2 2 1 1 3 3 1 2 2 1 4 4 1 3 2 2 3 1 3 3 1 2 2 1 3 1 1 2 2 2 1 1 3 3 1 2 2 1 5 5 1 4 2 3 3 2 4 1 4 4 1 3 2 2 3 1 del del del i PR i del del del i PR del i del i del del del del i PR i del del del del i PR i del del del del i PR i PR d T b a T b a b a T b a b a b a T KK a a a a T T b a T b a b a T b a b a b a T KK T b a T T b a b a b a T T T b a T b a b a T b a b a b a T KK b a b a b a b a b a T T T b a T b a b a T b a b a b a T KK b a b a b a b a b a b a b a T T T b a T b a b a T b a b a b a T KK b a b a b a b a b a b a b a b a b a T KK T ... ...2.37Hasil dari persamaan 2.35, 2.36, 2.37 didapatkan persamaan parameter kontroler PID yang diekspresikan kedalam suatu proses :
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − + − + + − − + + − ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + − − + − + + − + − = 2 1 1 3 1 1 2 2 1 1 3 2 1 3 2 1 1 2 1 1 2 1 3 1 1 2 2 2 1 1 2 1 3 3 1 2 2 1 2 1 1 2 1 3 1 ) ( 3 ) ( ) ( 2 6 ) ( 2 ) ( 2 del d del del del PR del del del T b a T T b a T b a T b b b a b a a a b a K T b a T b a b a a T b a b a a a b a b a a K …...………..……….2.38
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − + + − − ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + − − + − + + − + − = ) ( 2 ) ( 6 ) ( 2 ) ( 2 1 1 2 1 1 2 2 1 1 2 1 3 1 1 2 2 2 1 1 2 1 3 3 1 2 2 1 2 1 1 2 1 3 1 del d del del del del del i T b a T T b a T b a b a a T b a T b a b a a T b a b a a a b a b a a T ...……….2.39 ) , , ( 1 5 1 5 del d f a a b b T T = ⋅ ⋅⋅ ⋅ ⋅⋅ …...……….2.40
Untuk menggunakan metode ini kedalam sebuah aplikasi, diperlukan identifikasi parameter-parameter KPR, a1, a2, a3, a4, a5, b1, b2, b3, b4, b5, dan Tdel dari fungsi alih.
Parameter-parameter tersebut diperoleh dari hasil pengukuran pada keadaan asli. Masalah utama yang akan dihadapi yaitu didapatkannya hasil pengukuran yang sama dengan yang digunakan pada keadaan sebenarnya. Untuk menghindari masalah tersebut, digunakan solusi dengan metode multiple integrations. metode ini dapat diekspresikan dengan mengintegralkan proses open-loop model step-response (y(t)), setelah memasukkan step-change ΔU pada proses input. Proses integrasi ditunjukkan pada saat proses mulai memasuki proses closed-loop dengan waktu interval t = [t0,t1]. Proses integrasi model step-respon (y(t)) merupakan integrasi
awal yang menghasilkan suatu luas daerah integrasi (An) yang dimana dapat
direpresentasikan sebagai daerah fungsi yn(t). Selanjutnya dilakukan proses
dengan fungsi yn+1(t) yang akan mengalami proses integrasi kembali. Dalam proses
multiple integrations, daerah integrasi yang diperoleh adalah dari daerah A1 sampai
A5. Dalam persamaan matematik, integrasi ini dapat diekspresikan sebagai berikut:
( )
KPR(
a b Tdel)
y A1 = 1 ∞ = 1− 1 + ………2.41( )
1 1 2 1 2 2 2 2 ! 2 Aa T b T a b K y A del del PR + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + − − = ∞ = ……….2.42( )
2 1 1 2 3 1 2 2 3 3 3 3 ! 3 2 A a Aa T b T b T b a K y A del del del PR + − ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + − + − = ∞ = ………2.43( )
1 4 3 1 2 2 1 3 3 2 2 2 4 4 4 4 2 3! 4! Aa A a Aa T b T b T b T a b K yA del del del
del PR + − + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + − − − − = ∞ = ……..2.44
( )
4 1 3 2 2 3 1 4 5 1 4 2 3 3 2 3 4 4 5 5 ! 5 ! 4 ! 3 2 Aa Aa Aa Aa T b T b T b T b T b a K yA del del del del
del PR + − + − ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + − + − + − = ∞ = ………..2.45
( )
( ) (
)
( )
i k i k k i k i k i del k k k k PR k K Aa i b T b a K y A − + − = = − + − +∑
+∑
− ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − = ∞ = 1 1 1 1 1 1 1 ) 1 ( ! 1 1 …...2.46dari persamaan diatas maka didapatkan daerah fungsi dari y1(t)−y5(t) :
U y t y t y Δ − = ( ) (0) ) ( 0 ………..2.47
[
K y τ]
dτ t y t o PR∫
− = 0 1( ) ( ) ………...2.48( )
t =∫
t(
A −y( )
)
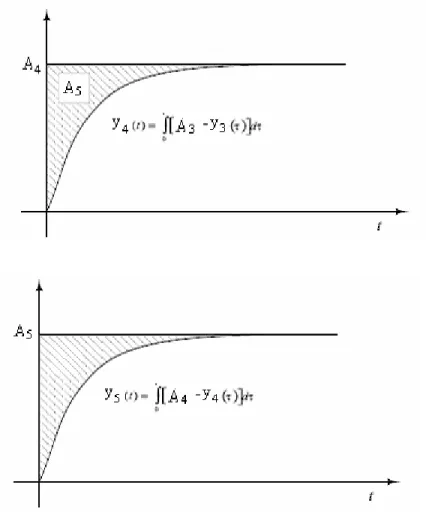
d y 0 1 1 2 τ τ ………2.49( )
t =∫
t(
A − y( )
)
d y 0 2 2 3 τ τ…….………...……….2.50( )
t =∫
t(
A − y( )
)
d y 0 3 3 4 τ τ……..………...2.51( )
t =∫
t(
A −y( )
)
d y 0 4 4 5 τ τ…….………...2.52atau dapat disimpulkan dengan persamaan di bawah ini :
[
]
∫
− − − = t k k k t A y d y 0 1 1 ( ) ) ( τ τ ………...…….…2.53Berikut merupakan grafik representasi dari luas daerah A1 sampai A3 berdasarkan
Gambar 2.11 Area integrasi A1 sampai A5
Dengan memasukkan persamaan 2.41, 2.42, 2.43, 2.44 dan 2.45 yang didapatkan dari proses open-loop step response kedalam persamaan 2.38, 2.39 dan 2.40,maka didapatkan hasil sebagai berikut :
5 1 2 3 5 2 4 3 A A A A A A A Td − − = ………...2.54