LAPORAN KEMAJUAN
PENELITIAN UNGGULAN
DANA ITS TAHUN 2020
Evaluasi Skenario Integrasi dan Pengujian Kinerja Sistem
dan Fungsi Kemudi Kooperatif pada Mobil Otonom
Tim Peneliti:
ACHMAD AFFANDI (Teknik Elektro)
EKO SETIJADI (Teknik Elektro)
DJOKO PURWANTO (Teknik Elektro)
IMAM ARIFIN (Teknik Otomasi Industri)
DIREKTORAT RISET DAN PENGABDIAN MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Daftar Isi
Bab I RINGKASAN ... 3
Bab II HASIL PENELITIAN ... 4
II.1 Sistem Mobil Otonom ... 4
II.2 Integrasi Sub-sistem Mobil Otonom ... 7
II.3 Skenario Eksperimen Kinerja Kemudi Kooperatif ... 10
Bab III STATUS LUARAN ... 12
Bab IV PERAN MITRA ... 13
Bab V KENDALA PELAKSANAAN PENELITIAN ... 14
Bab VI RENCANA TAHAPAN SELANJUTNYA ... 15
Bab VII DAFTAR PUSTAKA ... 16
Bab VIII LAMPIRAN ... 18
Bab I RINGKASAN
Pengembangan mobil listrik lebih lanjut adalah memberikan kemampuan self-driving (otonom) pada mobil agar mampu melakukan penginderaan lingkungan dan bergerak dengan aman dengan sedikit atau tanpa bantuan manusia. Kemampuan ini didukung oleh sistem kemudi kooperatif yang mengontrol kemudi mobil dengan bantuan sistem cerdas.
Pelaksanaan riset ini sesuai dengan jadwal yang sudah diusulkan dan telah berjalan pada tahap laporan kemajuan, secara umum kemajuan dapat sebesar 71% (tujuh puluh satu persen). Permasalahan integrasi sistem dipecahkan dalam riset integrasi sub-sistem, khusus pada riset ini memastikan integrasi sub-sistem mekanik mobil (sistem kemudi), sub-sistem elektrik penggerak mobil, sub-sistem sensor lingkungan dan sub-sistem kontrol kemudi otomatis dengan dukungan sistem cerdas. Tujuan riset yaitu kalibrasi kontrol kemudi kooperatif pada mobil otonom.
Target penelitian ini diharapkan akan dapat dikontribusikan diantaranya:
Integrasi sistem kemudi kooperatif pada mobil otonom beroperasi
Kontribusi model dan metode operasional dari sub-sistem kemudi kooperatif
Acuan kalibrasi pada sistem kontrol kemudi cerdas untuk mobil otonom
Untuk pengembangan ini perlu integrasi sub sistem Smart Drive dan Sistem Mekatronika Mobil Listrik, Desain On Board Unit termasuk komunikasi, user interface, computing unit, storage; navigasi (sensor, LIDAR, RADAR, PU, GPS); Communication System, Network Protocol & Interface; pemanfaatan AI dan Smart Data Processing, desain UX dan aplikasi pengguna serta tak kalah penting adalah jaringan dan manajemen Battery dan Charging.
Proses integrasi tersebut menjadi bagian penting dalam setiap langkahnya dalam penyatuan operasional seluruh sub sistem. Kemudian hasil dari integrasi tersebut akan memberikan kinerja penuh pada sistem utama dari mobil otonom, yaitu pada sistem kemudi kooperatif. Evaluasi kinerja hasil integrasi ini dilakukan dengan beberapa tahapan, pada tahapan awal dalam proses integasi pengujian di lokasi memastikan bahwa sistem kemudi kooperatif dapat berjalan yakni dengan sistem manual, kemudian dilakukan dengan pengaktifan kontrol kemudi kooperatif dan kembali dengan sentuhan di kemudi akan mengembalikan ke kontrol manual.
Selanjutnya pengukuran kinerja dilakukan dengan penerapan kontrol kemudi kooperatif secara otonom pada rute yang ditentukan. Eksperimen ini memastikan pengenalan rute lebih awal di sistem sebagai rute acuan. Kemudian membandingkan posisi mobil saat berjalan dengan rute acuan, dan memastikan kontrol kemudi menyesuaikan target rute acuan. Kata Kunci : mobil otonom, kemudi kooperatif, kontrol cerdas, autonomous vehicle
Bab II HASIL PENELITIAN
Hasil kemajuan pelaksanaan penelitian diuraikan dalam sub bab (2.2) Sistem Mobil Otonom, (2.3) Integrasi Sub Sistem dan (2.4) Eksperimen Kinerja Kemudi Kooperatif yang dilakukan. Hasil penelitian ini merupakan tahapan yang telah dilakukan bersama dalam konsorsium tim penelitian intelligent-CAR (iCAR) ITS yang dikoordinasikan oleh Direktorat Riset dan Pengabdian Masyarakat (DRPM) ITS.
II.1 Sistem Mobil Otonom
Mobil otonom adalah mobil yang memiliki kemampuan berkendara mandiri layaknya dikendalikan seperti manusia. Kendaraan tersebut dilengkapi dengan teknologi kecerdasan buatan (Artificial intelligent), sensor lingkungan dan aktuator sehingga mamungkinkan berjalan tanpa dikendalikan manusia.
Mobil otonom yang dikembangkan dalam riset ini merupakan produk riset lintas disiplin antara teknologi otomotif dan teknologi informasi, desain produk dan teknologi utama yang disematkankan didalamnya adalah Artificial Intelligent (AI).
Mobil otonom ini mampu melakukan analisa lingkungan sekitar melalui sensor dan mengambil mampu keputusan sendiri sehingga tidak memerlukan bantuan manusia dalam pengoperasiannya.
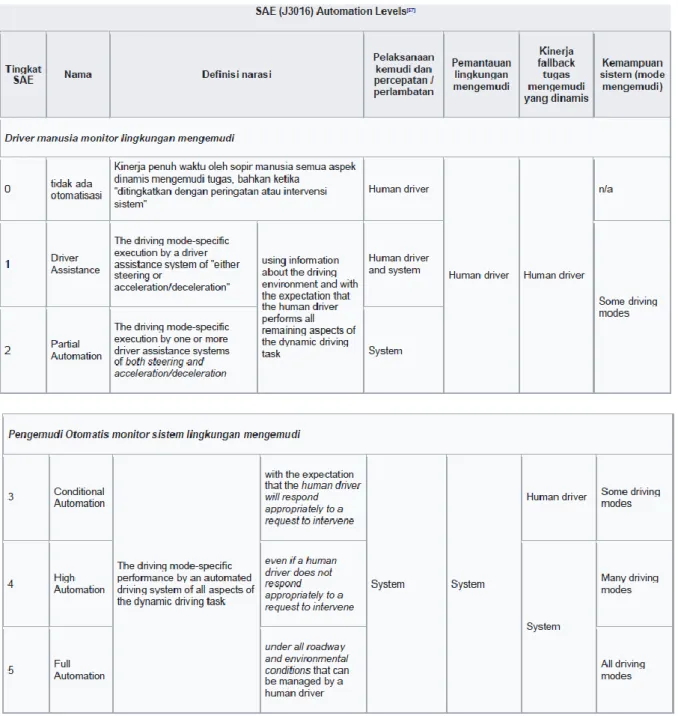
Tingkat otomasi dari mobil otonom menurut standar SAE (J3016) ada 5 tingkatan, seperti diberikan dalam gambar 2.
Gambar 2. Tingkat otomasi pada mobil otonom 1) Autonomous Tingkat 0
Otomasi pada level ini adalah kendaraan masih dikendalikan oleh manusia sehingga tidak ada fitur Autonomous pada kendaraan di tingkat ini.
2) Autonomous Tingkat 1
Pada tingkat ini fitur fitur otomasi mulai diterapkan untuk mendukung aspek keselamatan, keamanan dan kenyamanan pengemudi selama berkendara. Fitur auto
braking atau pengereman otomatis adalah ciri khas otomasi tingkat 1 dimana suatu kendaraan hanya mampu melakukan satu tugas dalam satu kesempatan
3) Autonomous Tingkat 2
Pada tingkat ini kendaraan memiliki sistem otomatisasi parsial. Kendaraan minimal 2 fitur otomatis seperti Steering dan Lane Control Assistant termasuk Traffic Jam Assistant, membuat mengemudi sehari-hari jauh lebih mudah. Sistem pengereman secara otomatis, akselerasi otomatis dan, perlahan – lahan mengambil alih sistem kendali
4) Autonomous Tingkat 3
Kendaraan otonom level 3 mampu mengemudi sendiri, tetapi hanya dalam kondisi ideal dan dengan keterbatasan, seperti akses terbatas yang terbagi jalan raya dengan kecepatan tertentu. Meski tangan terlepas dari kemudi, pengemudi tetap diharuskan di belakang kemudi. Seorang pengemudi manusia masih harus mengambil alih jika kondisi jalan berada di bawah yang ideal.
5) Autonomous Tingkat 4
Kendaraan otonom level 4 dapat mengemudi sendiri tanpa interaksi manusia (selain memasuki tujuan Anda) tetapi akan dibatasi untuk kasus penggunaan yang diketahui. Operasional kendaraan otonom level 4 ini masih dibatasi oleh hukum dan regulasi. Fitur autonomous Kendaraan level 4 masih dapat dioperasikan hanya pada lingkungan tertentu
6) Autonomous Tingkat (level) 5
Pada kendaraan Autonomous level 5 kita tiba di mobil tanpa pengemudi sejati. Kendaraan berkemampuan level 5 harus dapat memonitor dan bermanuver melalui semua kondisi jalan dan tidak memerlukan intervensi manusia apa pun, menghilangkan kebutuhan akan roda kemudi dan pedal. Meskipun banyak komponen teknologi artificial intelligent yang memungkinkan terwujudnya kendaraan ini, namun dikarenakan peraturan dan regulasi hukum, kendaraan Level 5 mungkin masih membutuhkan waktu beberapa tahun ke depan.
Para rancangan riset mobil otonom iCAR ITS, telah didefinisikan untuk mencapai tingkat 3, mobil otonom dapat beroperasi pada jalur yang telah dirancang pada lingkungan terbatas. Mengingat peraturan tentang kendaraan swa kemudi di Indonesia belum diatur, sehingga penerapan iCAR ITS ini pada lingkungan atau area pribadi/kompleks tertentu, untuk pemanfaatan terbatas.
Meskipun dalam pemanfaatan yang terbatas iCAR ITS yang dirancang memiliki fitur kemudi otonom dengan bantuan sistem kontrol kemudi kooperatif, bersamaan dengan manual jika diinginkan.
II.2 Integrasi Sub-sistem Mobil Otonom
Para rancangan riset mobil otonom iCAR ITS, telah didefinisikan untuk mencapai tingkat 3, mobil otonom dapat beroperasi pada jalur yang telah dirancang pada lingkungan terbatas. Mengingat peraturan tentang kendaraan swa kemudi di Indonesia belum diatur, sehingga penerapan iCAR ITS ini pada lingkungan atau area pribadi/kompleks tertentu, untuk pemanfaatan terbatas.
Meskipun dalam pemanfaatan yang terbatas iCAR ITS yang dirancang memiliki fitur kemudi otonom dengan bantuan sistem kontrol kemudi kooperatif, bersamaan dengan manual jika diinginkan.
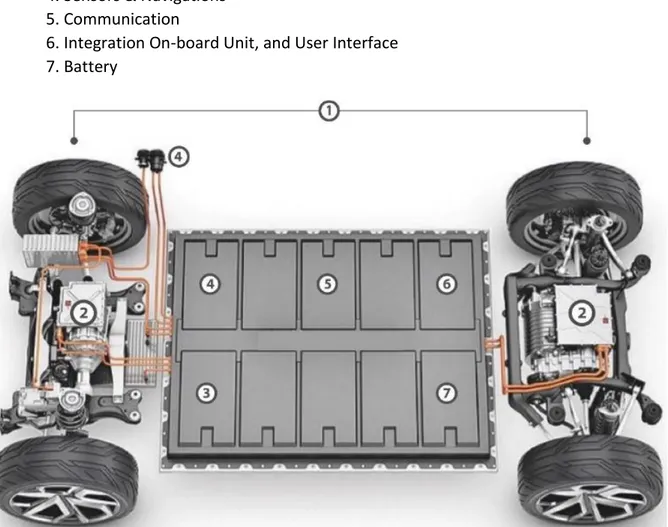
Arsitektur dasar dari mobil otonom iCAR ITS yang dirancang diberikan pada gambar 3, yang terdiri dari 7 sub-sistem diantaranya:
1. Body Frame,
2. Frame, Power Drive & Steering 3. Servo Control & Mechatronics 4. Sensors & Navigations
5. Communication
6. Integration On-board Unit, and User Interface 7. Battery
Pada riset konsorsium ini digunakan pada awalnya adalah memanfaatkan arsitektur mobil golf sebagai platform dan body mobil listrik. Tim mekatronik berfokus pada riset otomasi kemudi cerdas untuk mendukung sistem mobil otonom, yang meliputi kontro elemen nomor 2 sampai 6 dengan catuan dari 7.
Berikut gambar 4, hasil kemajuan dari rancangan modifikasi platform mobil golf pada tahapan awal untuk dirancang sistem otonom tersebut.
Gambar 4. Hasil rancangan modifikasi platform body mobil golf menjadi iCAR ITS Hasil rancangan sub-sistem navigasi cerdas yang mendukung kemudi kooperatif yang dirancang adalah sebagai berikut.
1) Diagram blok sistem navigasi
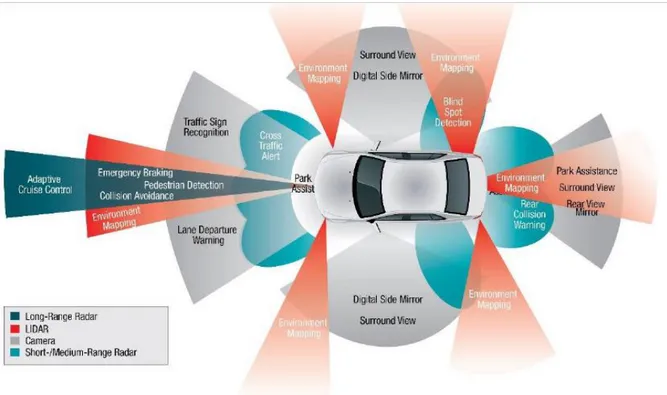
Sistem navigasi cerdas yang dirancang seperti yang ditunjukkan di gambar 5. Sistem ini terdiri dari :
penerima GPS (Global Positioning Satellite), sebagai sensor posisi yang akan memberikan luaran data posisi mobil berupa koordinat bujur dan lintang.
Kamera yang digunakan memonitor kondisi lingkungan di sekitar mobil, luaran kamera akan mencatu masukan gambar pada sub-sistem pengolah gambar (image processor) yang luarannya diteruskan ke sistem navigasi untuk mendukung pengambilan keputusan
LIDAR (Light Detection and Ranging), perangkat sensor yang mendeteksi obyek dan mengukur jaraknya, yang digunakan untuk catuan obyek dan jaraknya disekitar mobil saat bergerak, sehingga menjadi pertimbangan keputusan navigasi. Tiga sensor utama tersebut di atas merupakan data penting dalam sistem navigasi cerdas yang akan memberikan keputusan terhadap kontrol kemudi, kecepatan motor listrik dalam perjalanan mobil otonom.
Sistem navigasi cerdas yang dibangun merupakan integrasi dari tiga sensor utama dan aktutor berupa sitem throttle, sistem kemudi (steering), sistem pengeriman (braking) dan sistem instrumentasi yang akan mengontrol, merupakan antar muka termasuk sistem komunikasi.
Gambar 5. Sistem navigasi cerdas
Rincian diagram perangkat keras pendukung navigasi cerdas diberikan seperti gambar 6.
2) Diagram perangkat keras navigasi cerdas
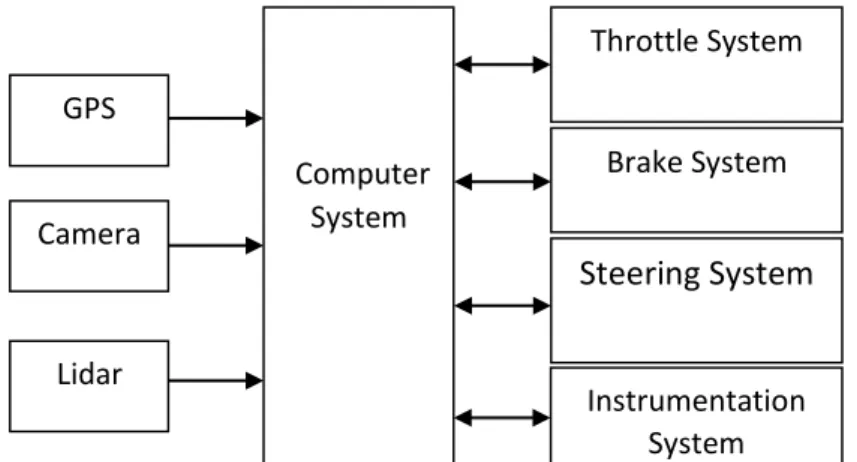
Perangkat keras utama yang mendukung sistem navigasi cerdas ini terdiri dari sebuah sistem komputer yang terhubung ke tiga sensor utama (GPS, kamera, LIDAR) dan aktuator berupa sub-sistem throttle, brake, steering dan instrumentasi.
Gambar 6. Rangkaian perangkat yang terhubung untuk navigasi cerdas
Untuk masing-masing aktuator akan ditransaksikan data sebagai berikut :
Throttle system:
o input : posisi throttle. o Output: posisi throttle.
Brake System o Input: torsi
o Output: posisi throttle.
Steering system o Input: posisi o Output: posisi
Instrumentation (lamp, sign, dll) o Input: state o Output: state Car Velocity Steering Position GPS Camera Lidar Navigation System GPS Camera Lidar Computer System Throttle System Brake System Steering System Instrumentation System
Gambar-gambar terkait dengan komponen pendukung sistem navigasi cerdas disampaikan di lampiran I.
II.3 Skenario Eksperimen Kinerja Kemudi Kooperatif
Skenario eksperimen untuk evaluasi kinerja kemudi kooperatif perlu disiapkan untuk lintasan perjalanan yang direncanakan. Kendaraan otonom ini beroperasi pada area tertentu dengan lintasan yang perlu didefinisikan lebih awal sebagai acuan target lintasan. Selanjutnya mobil akan dapat berjalan sesuai dengan target lintasan.
Pada percobaan ini, mobil dijalankan secara otonom dengan menggunakan GPS Referensi yang diletakkan pada parkiran belakang gedung Robotika ITS. Tinggi GPS Referensi hanya sekitar 3 meter. Koneksi antara GPS referensi dengan GPS rover (pada mobil) menggunakan koneksi telemetri, sedangkan koneksi internet menggunakan Wi-Fi yang diletakkan di dekat GPS Referensi.
Tujuan dari percobaan ini adalah menguji mobil otonom pada ruas jalan yang sederhana, yaitu hanya terdiri dari dua bundaran sebagai putar balik dan dua ruas jalan lurus. Pengujian ini lebih menitik beratkan pada fungsionalitas sistem secara keseluruhan.
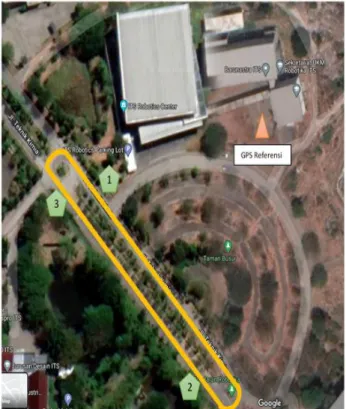
Dua skenario yang disiapkan telah dimasukkan dalam system navigasi cerdas seperti di gambar 7 dan 8.
Pada scenario 1: Gambar 7, lintasan jalan yang dilalui, titik terdekat dari dengan GPS Referensi sejauh 104 meter, sedangkan titik terjauh dari GPS referensi adalah 150 meter. Panjang lintasan total yang digunakan adalah sekitar 400 meter.
Sedangkan untuk scenario 2: Gambar 8, dilakukan di taman alumni. Agar dalam pelaksanaan penentuan posisi lebih akura, dipasan pemancar GPS Referensi ada di sisi taman alumni (GPS RTK Reference). Titik terdekat dengan GPS Referensi : 5 meter, sedangkan titik terjauh dengan GPS Referensi sebesar 150 meter. Adapun panjang lintasan : 600 meter.
Bab III STATUS LUARAN
Uraian status proses mencapai luaran yang didukung dengan bukti kemajuan ketercapaian luaran yang data lengkapnya disampaikan pada bagian bab Lampiran.
Target luaran penelitian ini diharapkan yang dikontribusikan diantaranya:
Integrasi sistem kemudi kooperatif pada mobil otonom beroperasi
Kontribusi model dan metode operasional dari sub-sistem kemudi kooperatif
Bab IV PERAN MITRA
Bab V KENDALA PELAKSANAAN PENELITIAN
Kendala pelaksanaan penelitian konsorsium diantaranya: Waktu pekerjaan yang seria, sehingga untuk eksperimen harus menunggu pekerjaan tim body, tim yang mengembangkan platform termasuk penggerak, tim
mekatronika. Sekaligus pekerjaan ini dilakukan bersama-sama dengan tim platform dan mekatronika.
Pelaksanaan pekerjaan penelitian menunggu pengadaan barang utama: platform mobil golf dan pengadaan LIDAR yang memerlukan waktu.
Sinergitas dan integrase kerjasama dengan disiplin ilmu lain juga memerlukan waktu yang lebih panjang dari perkiraan. Hambatan atau kendala yang mungkin terjadi pada tahap ini terjadi dalam prosesnya, diidentifikasi sebagai kendala yang dihadapi adalah evaluasi konsep baru.
Bab VI RENCANA TAHAPAN SELANJUTNYA
Rencana tahapan selanjutnya berisi tentang rencana penyelesaian penelitian dan rencana untuk mencapai luaran yang dijanjikan.
Rencana kegiatan selanjutnya diberikan dalam table berikut.
NO KEGIATAN SEP OKT NOV DEC
1 Pembuatan acuan rute 1 & 2 __xx 2 Pengukuran kinerja sistem kemudi kooperatif xx 3 Penyempurnaan sistem navigasi cerdas __x 4 Final Evaluasi Kinerja sistem kemudi koopertif ___x
5 Penyusunan Luaran Penelitian ___X
6 Penyusunan Laporan Akhir X
Bab VII DAFTAR PUSTAKA
1. "Vehicle-To-Vehicle Communication Technology For Light Vehicles" (PDF). www.google.com. p. e10. Retrieved 2019-12-02.
2. An assessment of LTE-V2X (PC5) and 802.11p direct communications technologies for improved road safety in the EU.(http://5gaa.org/wp-content/uploads/2017/12/5GAA-Roadsafety-FINAL2017-12-05.pdf)
3. White Paper on ITS spectrum utilization in the Asia Pacific Region
(http://5gaa.org/wpcontent/uploads/2018/07/5GAA_WhitePaper_ITS-spectrum-utilization-in-the-Asia-PacificRegion_FINAL_160718docx.pdf)
4. C-ITS: Three observations on LTE-V2X and ETSI ITS-G5—A comparison (https://www.nxp.com/docs/en/white-paper/CITSCOMPWP.pdf)
5. Heterogeneous Vehicular Networking: A Survey on Architecture, Challenges, and Solutions(https://doi.org/10.1109/COMST.2015.2440103)
6. EN 302 663 Intelligent Transport Systems (ITS); Access layer specification for Intelligent Transport Systems operating in the 5 GHz frequency band
(http://www.etsi.org/deliver/etsi_en/302600_302699/302663/01.02.00_20/en_302663v01 0200a.pdf)
7. Taeihagh, Araz; Lim, Hazel Si Min (2 January 2019). "Governing autonomous vehicles: emerging responses for safety, liability, privacy, cybersecurity, and industry risks". Transport Reviews. 39 (1): 103–128. arXiv:1807.05720. doi:10.1080/01441647.2018.1494640. ISSN 0144-1647.
8. Maki, Sydney; Sage, Alexandria (19 March 2018). "Self-driving Uber car kills Arizona woman crossing street". Reuters. Retrieved 14 April 2019.
9. Thrun, Sebastian (2010). "Toward Robotic Cars". Communications of the ACM. 53 (4): 99– 106. doi:10.1145/1721654.1721679.
10. Gehrig, Stefan K.; Stein, Fridtjof J. (1999). Dead reckoning and cartography using stereo vision for an automated car. IEEE/RSJ International Conference on Intelligent Robots and Systems. 3. Kyongju. pp. 1507–1512. doi:10.1109/IROS.1999.811692. ISBN 0-7803-5184-3. 11. Lassa, Todd (January 2013). "The Beginning of the End of Driving". Motor Trend. Retrieved 1
September 2014.
12. "European Roadmap Smart Systems for Automated Driving" (PDF). EPoSS. 2015. Archived from the original (PDF) on 12 February 2015.
13. Lim, Hazel Si Min; Taeihagh, Araz (2019). "Algorithmic Decision-Making in AVs:
Understanding Ethical and Technical Concerns for Smart Cities". Sustainability. 11 (20): 5791. arXiv:1910.13122. Bibcode:2019arXiv191013122L. doi:10.3390/su11205791.
14. "Self-driving trucks are here – here's how they will transform the trucking industry" (Video). CNBC Videos. 13 April 2019. Retrieved 14 April 2019 – via Yahoo.
15. "'Phantom Auto' will tour city". The Milwaukee Sentinel. 8 December 1926. Retrieved 23 July 2013.
16. Vanderblit, Tom (6 February 2012). "Autonomous Cars Through The Ages". Wired. Retrieved 26 July 2018.
17. Marc Weber (8 May 2014). "Where to? A History of Autonomous Vehicles". Computer History Museum. Retrieved 26 July 2018.
18. "Carnegie Mellon". Navlab: The Carnegie Mellon University Navigation Laboratory. The Robotics Institute. Retrieved 20 December 2014.
19. Kanade, Takeo (February 1986). Autonomous land vehicle project at CMU. CSC '86
Proceedings of the 1986 ACM Fourteenth Annual Conference on Computer Science. Csc '86. pp. 71–80. doi:10.1145/324634.325197. ISBN 9780897911771.
20. Wallace, Richard (1985). "First results in robot road-following" (PDF). JCAI'85 Proceedings of the 9th International Joint Conference on Artificial Intelligence. Archived from the original (PDF) on 6 August 2014.
21. Schmidhuber, Jürgen (2009). "Prof. Schmidhuber's highlights of robot car history". Retrieved 15 July 2011. 23. Turk, M.A.; Morgenthaler, D.G.; Gremban, K.D.; Marra, M. (May 1988). "VITS-a vision system for automated land vehicle navigation". IEEE Transactions on Pattern Analysis and Machine Intelligence. 10 (3): 342–361. doi:10.1109/34.3899. ISSN 0162-8828
Bab VIII LAMPIRAN
VIII.1 Komponen Sensor Utama Sistem Navigasi Cerdas
Pemasangan LIDAR di posisi tengah bagian depan
Posisi LIDAR setelah body mobil tertutup
Posisi GPS