6
DASAR TEORI
2.1. Sistem Gerak Quadcopter
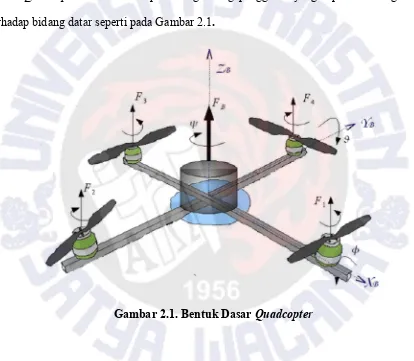
Quadcopter memiliki empat baling-baling penggerak yang diposisikan tegak lurus terhadap bidang datar seperti pada Gambar 2.1.
Gambar 2.1. Bentuk Dasar Quadcopter
Untuk membantu menganalisa gerak dari Quadcopter, dibentuk 2 sistem koordinat kartesian 3 dimensi yaitu sistem koordinat lokal pesawat (body frame, Qb) dan sistem
koordinat bumi (ground frame, Qg), seperti Gambar 2.2.
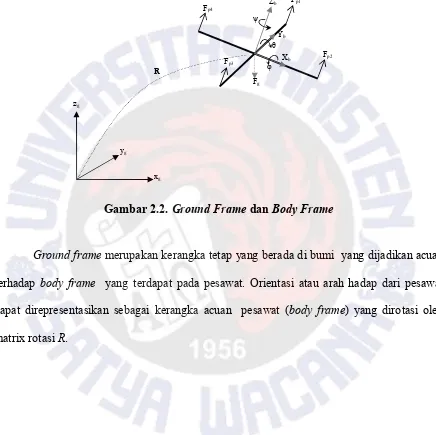
Gambar 2.2. Ground Frame dan Body Frame
Ground frame merupakan kerangka tetap yang berada di bumi yang dijadikan acuan terhadap body frame yang terdapat pada pesawat. Orientasi atau arah hadap dari pesawat dapat direpresentasikan sebagai kerangka acuan pesawat (body frame) yang dirotasi oleh matrix rotasi R.
xg yg
zg
Fg Xb Yb Zb ψ
φ θ Fp4
Fp3
Fp2 Fp1
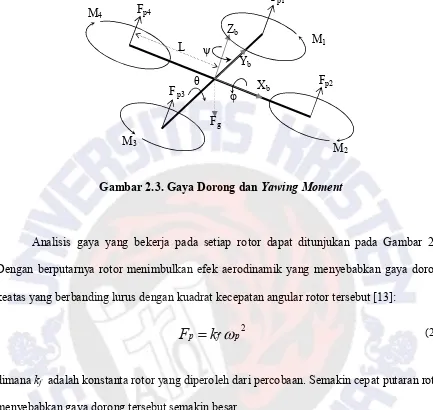
Gambar 2.3. Gaya Dorong dan Yawing Moment
Analisis gaya yang bekerja pada setiap rotor dapat ditunjukan pada Gambar 2.3. Dengan berputarnya rotor menimbulkan efek aerodinamik yang menyebabkan gaya dorong keatas yang berbanding lurus dengan kuadrat kecepatan angular rotor tersebut [13]:
2
p f p
F
k
dimana kf adalah konstanta rotor yang diperoleh dari percobaan. Semakin cepat putaran rotor
menyebabkan gaya dorong tersebut semakin besar.
Setiap baling-baling memberikan gaya dorong keatas sebesar Fp yang tegak lurus
terhadap kerangka pesawat (body frame) atau searah sumbu zb. Sementara gaya gravitasi
bekerja pada pusat massa Quadcopter atau pada sumbu -zg. Jika ⃗ adalah vektor posisi dari
quadcopter dan m adalah massa dari quadcopter dengan rotasi matrik R didapatkan:
(2.1)
(2.2)
Fg
Xb
Yb
Zb
Fp4
F p3 Fp2
Fp1
M1
M2
M3
M4
φ θ
2 2
0
0
0
0
d r dtm
R
mg
Fp
Perbedaan gaya dorong ke atas pada masing-masing rotor menyebabkan gerak rotasi dengan pusat rotasi O (pusat massa Quadcopter). Jika jarak antara pusat masa O dengan pusat rotor adalah L maka:
4 2
res p p
res
F
F
F
L F
1 3res p p
res
F
F
F
L F
dimana ⃗θ adalah torsi yang bekerja searah sudut θ (roll) dan ⃗φ adalah torsi yang bekerja
searah sudut φ (pitch).
Sesuai dengan hukum III Newton tentang aksi dan reaksi, pada setiap rotor timbul yawing moment yang berlawanan dengan arah putar propeller rotor tersebut [13], seperti pada Gambar 2.3. Yawing moment ini berbanding lurus dengan kuadrat kecepatan angular rotor sesuai dengan persamaan 2.8.
2
m p
M k
Pada persamaan 2.8, km merupakan konstanta yawing moment yang diperoleh dari percobaan.
Berdasarkan konfigurasi arah putar rotor pada Gambar 2.3, rotor 2 dan 4 berputar searah dengan sudut ψ positif, sedangkan rotor 1 dan 3 berputar berlawanan arah atau sudut ψ
(2.3)
(2.4)
negatif. Sehingga rotor 2 dan 4 memberikan yawing moment searah sudut ψ negatif, dan sebaliknya, rotor 1 dan 3 memberikan yawing moment searah sudut ψ positif. Sehingga bila dikehendaki sudut ψ diam, atau = 0, maka:
M
2
M
4
M M
1
3
0
Gerak dari Quadcopter ditentukan oleh kombinasi dari setiap gaya keatas (searah sumbu zp) yang ditimbulkan oleh masing-masing rotor. Sehingga dengan mengatur
kombinasi kecepatan putar masing-masing rotor, gerak dari quadcopter dapat diarahkan. Sebagai contoh, jika diasumsikan Fp1 – Fp3 = 0, atau Quadcopter tidak melakukan rotasi pada
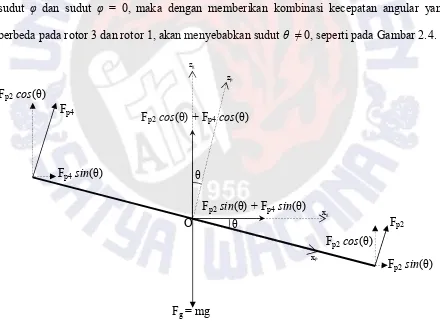
sudut φ dan sudut φ = 0, maka dengan memberikan kombinasi kecepatan angular yang berbeda pada rotor 3 dan rotor 1, akan menyebabkan sudut θ ≠ 0, seperti pada Gambar 2.4.
Gambar 2.4. Resultan Gaya Akibat Sudut θ ≠ 0
(2.6)
Fp2cos(θ) xp
xg zp
zg
θ
Fg = mg
Fp2sin(θ)
Fp2
Fp4sin(θ)
Fp2cos(θ)
Fp4
O
Fp2sin(θ) + Fp4sin(θ)
Fp2cos(θ) + Fp4cos(θ)
Berdasarkan Gambar 2.4, pada pusat massa O timbul gaya resultan searah sumbu xg
positif yang menyebabkan Quadcopter bergerak searah dengan gaya tersebut. Semakin besar sudut θ menyebabkan gaya searah sumbu xg semakin besar. Jika diharapkan Quadcopter
bergerak datar searah sumbu xg, maka besarnya kombinasi gaya yang searah dengan sumbu
zg harus sama dengan besarnya ⃗g. Hal yang sama pula dapat berlaku pada sudut θ. Dengan
mengatur kombinasi kedua sudut tersebut didapatkan resultan gaya yang dapat bergerak ke segala arah.
2.2.
Motor BLDC (Brushless Direct Current)
Quadcopter membutuhkan penggerak berupa baling-baling yang diputar oleh motor. Spesifikasi yang harus dipenuhi oleh sistem gerak ini adalah torsi, efisiensi dan getaran yang ditimbulkan oleh berputarnya motor dan baling-baling. Motor dengan getaran yang terlalu besar dapat mengganggu sensor-sensor yang digunakan pada AHRS. Efisiensi motor berkaitan dengan durabilitas terbang dari pesawat, mengingat sumber daya (battery) yang digunakan terbatas.
Brushless Direct Current Motor atau biasa disebut BLDC adalah motor DC yang proses komutasinya tidak menggunakan sikat seperti motor DC pada umumnya. Dibandingkan dengan motor DC dengan sikat, BLDC memiliki beberapa kelebihan yaitu: efisiensi tinggi, kecepatan dan torsi yang tinggi, respon dinamis yang tinggi, masa operasi yang panjang dan operasi tanpa noise [15]. Sehingga dengan kelebihan-kelebihan tersebut, BLDC banyak digunakan pada aplikasi aeromodelling dan termasuk pada quadcopter.
(bagian motor yang berputar) pada BLDC terdiri dari magnet permanen, sedangkan stator terdiri dari kumparan. Berbeda dengan motor DC dengan sikat, di mana rotor berupa lilitan dan stator berupa magnet tetap.
Pada umumnya, motor BLDC yang banyak tersedia adalah tipe 3 fasa. Gambar 2.5 menunjukan gambar mekanik dan koneksi elektrik dari motor BLDC 3 fasa. Pengkabelan kumparan stator tergabung menjadi 4 koneksi: A, B, C dan common1. Setiap fasa terdiri dari
dua buah kumparan identik yang terpisah.
Gambar 2.5. Struktur Mekanis dan Elektik Motor BLDC 3 fasa[18]
Untuk berputar penuh, motor BLDC memiliki 6 langkah komutasi. Setiap langkah komutasi melibatkan 2 kutub yang dieksitasi. Permasalahan yang timbul dalam menjalankan langkah-langkah komutasi ini adalah pendeteksian posisi rotor, karena posisi rotor menentukan langkah komutasi yang harus dilakukan. Ada dua jenis metode yang digunakan, yaitu dengan beberapa hall effect sensor dan metode tanpa sensor (sensorless) yang memanfaatkan BEMF (Back Electromotive Force).
1 Umumnya koneksi common merupakan koneksi didalam motor dan tidak dikeluarkan atau dihubungkan
Pendeteksian posisi rotor dengan hall effect sensor memanfaatkan kepekaan sensor ini dalam mendeteksi medan magnet permanen pada rotor. Beberapa hall effect sensor diletakan sedemikian rupa hingga setiap posisi rotor dapat didteksi.
Metode sensorless memanfaatkan arus listrik yang dihasilkan kumparan yang tidak tereksitasi yang diukur dari common dan kutub yang tidak tereksitasi, karena pada prinsipnya kutub yang tidak tereksitasi merupakan kumparan yang dapat menghasilkan arus listrik jika ada medan magnet menyinggungnya.
BLDC yang digunakan pada aeromodelling adalah BLDC sensorless 3 fasa. Untuk menggerakannya digunakan ESC (Electronics Speed Controller). ESC merupakan pengendali kecepatan BLDC dengan input berupa modulasi lebar pulsa (PWM). Dengan antarmuka PWM, kecepatan motor dapat diatur dengan mudah oleh pengendali seperti mikrokontroler. BLDC pada aeromodelling biasanya memiliki satuan kV, 1000 kV = 1000 RPM per Volt.
2.3. Baling-Baling (Propeller)
Baling-baling adalah alat yang mengubah gerak putar menjadi daya dorong. Daya dorong inilah yang dimanfaatkan pesawat terbang dan kapal laut sebagai penghasil daya dorong utama. Pembahasan baling-baling pada tugas akhir ini dibatasi hanya pada parameter baling-baling yang digunakan dalam RC (Radio Control) aeromodelling.
1. Diameter dan pitch
Semua baling-baling RC yang tersedia memiliki 2 buah ukuran, yaitu diameter dan pitch. Diameter dihitung berdasarkan diameter lingkaran yang dibentuk saat baling-baling berputar. Jika baling-baling-baling-baling dianalogikan sebagai sebuah sekrup, pitch merupakan jarak yang ditempuh oleh baling-baling jika diputar 1 putaran penuh. Semakin panjang diameter dan pitch baling-baling semakin banyak pula udara yang disapu dan semakin besar pula daya dorong yang dihasilkan. Tapi diameter dan pitch dari baling-baling ini harus disesuaikan dengan motor dan sumber daya yang digunakan. Biasanya produsen motor sudah memeberikan spesifikasi baling-baling untuk motor-nya.
Satuan dari diameter dan pitch dari baling-baling RC adalah inch. Baling-baling dengan ukuran 10x4.5 memiliki diameter 10 inch dan pitch 4.5 inch.
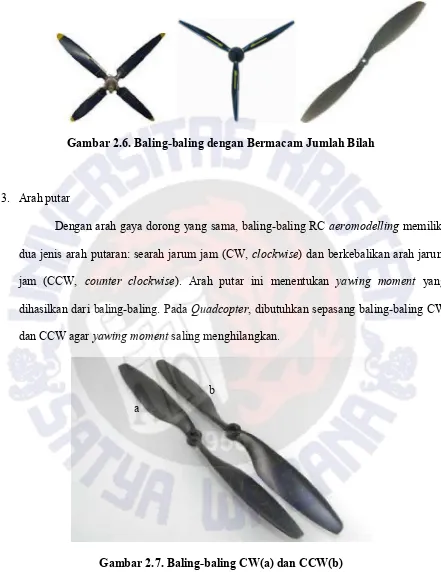
2. Jumlah bilah
Gambar 2.6. Baling-baling dengan Bermacam Jumlah Bilah
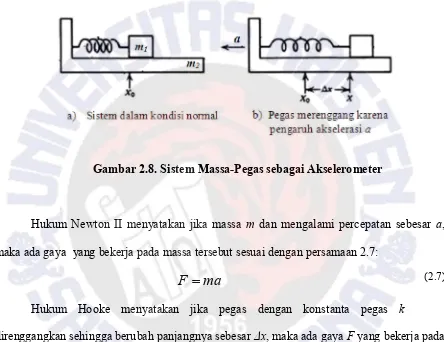
3. Arah putar
Dengan arah gaya dorong yang sama, baling-baling RC aeromodelling memiliki dua jenis arah putaran: searah jarum jam (CW, clockwise) dan berkebalikan arah jarum jam (CCW, counter clockwise). Arah putar ini menentukan yawing moment yang dihasilkan dari baling-baling. Pada Quadcopter, dibutuhkan sepasang baling-baling CW dan CCW agar yawingmoment saling menghilangkan.
Gambar 2.7. Baling-baling CW(a) dan CCW(b)
a
2.4.
Attitude Heading Reference System (AHRS)
Informasi orientasi pesawat sangat penting untuk diketahui oleh sistem pengendali utama pesawat. Informasi ini akan menjadi sumber masukan bagi pengendali utama untuk mengendalikan kecepatan motor demi mempertahankan sudut orientasi yang telah ditentukan.
Untuk mengetahui orientasi pesawat dalam ruang, Quadcopter membutuhkan sebuah piranti elektronik yang disebut Attitude Heading Reference System (AHRS). AHRS merupakan integrasi dari beberapa sensor dan menggunakan perhitungan tertentu untuk memadukan data dari sensor-sensor tersebut.
Pada bagian selanjutnya akan dibahas teori dasar yang digunakan untuk membangun AHRS. Pembahasan dimulai dengan sensor-sensor yang digunakan, teori rotasi matrik dan algoritma yang dipakai untuk mendapatkan informasi orientasi yang akurat.
2.4.1.
Akselerometer
Akselerometer adalah sensor yang digunakan untuk mengukur percepatan atau perubahan kecepatan terhadap waktu. Sensor ini dipasang bersama benda yang akan diukur akselerasinya, seperti mengukur perubahan kecepatan roket yang meluncur atau digunakan untuk analisis getaran (vibration analysis) pada mesin, serta digunakan untuk mendeteksi gerak dan kemiringan pada smart phone.
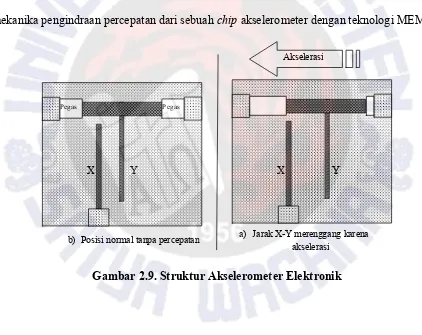
2.4.1.1.Konsep Akselerometer:Sistem Massa-Pegas
Akselerometer dapat dianalogikan sebagai sebuah sistem massa-pegas (mass spring system) yang bekerja berdasarkan Hukum Newton dan Hukum Hooke. Prinsip kerja dari sensor ini akan dijelaskan sebagai berikut.
Gambar 2.8. Sistem Massa-Pegas sebagai Akselerometer
Hukum Newton II menyatakan jika massa m dan mengalami percepatan sebesar a, maka ada gaya yang bekerja pada massa tersebut sesuai dengan persamaan 2.7:
F ma
Hukum Hooke menyatakan jika pegas dengan konstanta pegas k
direnggangkan sehingga berubah panjangnya sebesar Δx, maka ada gaya F yang bekerja pada pegas tersebut dinyatakan dalam persamaan 2.8:
F
k x
Pada Gambar 2.8, diilustrasikan sebuah sistem dengan massa m1 yang bebas
bergerak secara horisontal pada sebuah bidang berdinding m2. Massa m1 dihubungkan ke
dinding bidang m2 oleh sebuah pegas. Awalnya bidang m2 diam (Gambar 2.8a) dan pegas
dalam kondisi tidak merenggang. Pada Gambar 2.8b, ada percepatan horisontal a yang
(2.7)
bekerja pada sistem ini yang menyebabkan pegas merenggang sebesar Δx. Renggangnya pegas ini dikarenakan adanya gaya yang bekerja pada m1 akibat percepatan a. Dengan
menggabungkan Hukum Newton dan Hukum Hooke didapatkan:
Dimana,
k=konstanta pegas (N/m) Δx=perenggangan pegas (m) a=akselerasi sistem (m/s2)
Sehingga percepatan yang dialami oleh sistem sebesar:
k
a
x
m
Dengan persamaan 2.10, jika konstanta pegas dan massa diketahui, alat ukur percepatan dapat dibuat hanya dengan mengukur perubahan panjang dari pegas.
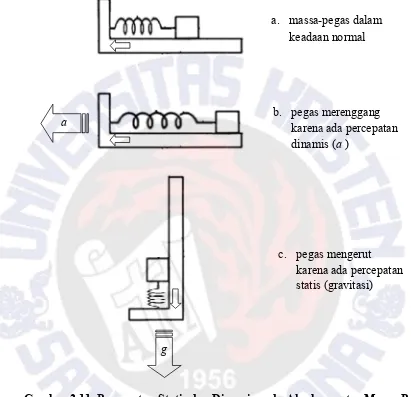
2.4.1.2.Sensor Akselerometer Elektronik dengan Teknologi MEMS
Sensor akselerometer elektronik adalah sensor akselerometer yang hasil pengukuran akselerasinya dinyatakan dalam tegangan atau data digital. Seperti dijelaskan sebelumnya, bahwa akselerometer dapat dibangun dengan massa yang dikaitkan dengan pegas, akselerometer elektronik memiliki prinsip yang sama dalam mengukur percepatan. Hanya saja tidak mungkin untuk membuat sensor dengan ukuran yang relatif besar seperti Gambar 2.8. Hingga pada akhir abad 20 dikembangkan teknologi MEMS (Micro-Electro-Mechanical Systems), yang mampu menerapkan prinsip akselerometer massa-pegas ke dalam sebuah chip.
(2.9)
(2.10)
Akselerometer dengan teknologi MEMS memanfaatkan perubahan kapasitansi dua buah plat terhadap perubahan jarak antar plat tersebut karena pengaruh akselerasi dari luar. Prinsip kerja dari akselerometer kapasitif ini dijelaskan sebagai berikut.
Pada Gambar 2.9, terdapat plat yang tetap (Y) dan plat yang dapat bergerak secara elastis (X). Saat sistem mendapatkan akselerasi (Gambar 2.9b), jarak antara kedua plat ini akan berubah dan menyebabkan kapasitansi kedua plat juga berubah. Selanjutnya dengan rangkaian elektronik perubahan kapasitansi ini diubah menjadi tegangan yang proporsional dengan akselerasi eksternal yang dirasakan oleh sistem. Gambar 2.10 menunjukan foto mekanika pengindraan percepatan dari sebuah chip akselerometer dengan teknologi MEMS.
Gambar 2.9. Struktur Akselerometer Elektronik
X Y
Pegas Pegas
Akselerasi
a) Jarak X-Y merenggang karena akselerasi
Y X
Gambar 2.10. Foto Mikroskopik Mekanik Akselerometer
dengan Teknologi MEMS
2.4.1.3.Percepatan Statis dan Dinamis pada Akselerometer
Ada dua jenis percepatan yang dapat dideteksi oleh akselerometer, yaitu percepatan statis dan percepatan dinamis. Percepatan dinamis adalah percepatan yang dialami oleh benda bergerak, sedangkan percepatan statis adalah percepatan yang dialami oleh benda diam.
Setiap benda dalam medan gravitasi bumi mendapatkan gaya tarik ke pusat bumi atau disebut gaya berat. Sebagai contoh, meskipun batu pada permukaan tanah kelihatan diam, tetapi ada percepatan statis yang bekerja pada batu tersebut karena pengaruh gaya tarik bumi.
bergerak mendatar terhadap permukaan bumi. Benda tersebut mendapatkan dua percepatan, yaitu percepatan gerak (dinamis) dan percepatan gravitasi yang arahnya ke bawah (statis).
Gambar 2.11. Percepatan Statis dan Dinamis pada Akselerometer Massa-Pegas
Pada Gambar 2.11 diperlihatkan akselerometer massa pegas untuk menjelaskan fenomena ini. Jika akselerometer massa pegas ini digerakkan searah tanda panah pada akselerometer (Gambar 2.11a) maka pegas akan merenggang karena ada pengaruh gaya yang menimbulkan percepatan. Dengan asumsi bahwa ada gaya gravitasi yang bekerja menuju pusat bumi, jika akselerometer kita arahkan ke tanah (arah panah pada sensor menunjuk
a
g
b. pegas merenggang karena ada percepatan dinamis (a )
a. massa-pegas dalam keadaan normal
pusat bumi, Gambar 2.11b ) pegas tidak akan merenggang tetapi mengerut. Respon pegas terhadap percepatan statis (gaya berat) berlawanan dengan respon pegas terhadap percepatan dinamis meskipun kedua percepatan memiliki arah yang sama.
2.4.1.4.Sumbu Pengukuran Akselerometer
Dalam mengukur percepatan, akselerometer memiliki sumbu pengukuran (axis). Percepatan yang searah dengan sumbu ini memiliki nilai maksimum, tetapi jika arah percepatan ini membentuk sudut maka besarnya percepatan yang terukur merupakan proyeksi percepatan yang bekerja terhadap sumbu pengukuran.
Gambar 2.12. Pengukuran Percepatan yang Membentuk Sudut
Terhadap Sumbu Pengukuran.
Gambar 2.12 menunjukan proyeksi percepatan dinamis pada akselerometer yang hanya memiliki satu sumbu pengukuran. Akselerometer yang banyak tersedia biasanya memiliki lebih dari satu sumbu pengukuran yang saling tegak lurus. Sumbu pengukuran ini sama dengan sumbu pada sistem koordinat kartesian.
akselerometer Sumbu pengukuran
α
a
cos
a
percepatandari luar membentuk sudut α
Gambar 2.13. Akselerometer dengan 3 sumbu pengukuran.
Jumlah dari sumbu pengukuran akselerometer menentukan kapabilitas dari sensor ini. Untuk mendeteksi besar dan arah percepatan pada satu bidang dibutuhkan dua sumbu pengukuran, dan jika dalam ruang dibutuhkan tiga sumbu pengukuran.
Pada pengaplikasiannya dalam AHRS, digunakan akselerometer 3 sumbu pengukuran untuk mendeteksi arah percepatan gravitasi dalam ruang. Karena percepatan gravitasi merupakan percepatan statis, maka sumbu pengukuran harus disesuaikan, mengingat arah percepatan statis berkebalikan dengan percepatan dinamis jika diukur oleh akselerometer. Sehingga akselerometer pada Gambar 2.13 memiliki sumbu pengukuran dinamis dan statis seperti pada Gambar 2.14.
Gambar 2.14. Sumbu pengukuran percepatan dinamis dan statis
x y z
x
z y
sumbu pengukuran dinamis
2.4.1.5.Parameter Akselerometer
Ada beberapa parameter penting yang dimiliki akselerometer yang tersedia di pasar. Parameter ini penting untuk diperhatikan dalam memilih tipe akselerometer untuk diaplikasikan dalam sebuah sistem.
1. Jumlah sumbu pengukuran (axis)
Seperti yang telah dibahas sebelumnya, bahwa jumlah sumbu pengukuran ini menentukan kapabilitas akselerometer dalam mengukur besar dan arah percepatan. Sebagai contoh akselerometer ADXL202 produksi Analog Device[] memiliki dua sumbu pengukuran, sedangkan LIS3LV02DL produksi ST Microelectronics memiliki tiga sumbu pengukuran.
2. Nilai skala penuh (full scale)
Nilai skala penuh merupakan percepatan maksimum yang dapat diukur oleh akselerometer. Nilai skala penuh biasanya mempunyai jangkauan positif dan negatif . Parameter ini penting untuk menentukan efektif tidaknya akselerometer yang akan dipilih terhadap aplikasi dimana akselerometer digunakan. Sebagai contoh, untuk mengukur akselerasi roket dengan percepatan maksimum 60g (588 m/s2, 1g=9.8 m/s2) akan sangat tidak efektif jika menggunakan ADXL202 yang memiliki skala penuh ±10g.
3. Antarmuka
dipakai dalam sistem benam seperti I2C (Inter-Integrated Circuit), SPI (Serial Peripheral Interface) dan PWM (Pulse Width Modulation). Di dalam akselerometer dengan keluaran data digital sudah terdapat ADC (Analog Digital Converter) internal sehingga tidak diperlukan lagi ADC tambahan.
4. Frekuensi cuplik
Besarnya frekuensi cuplik akselerometer merupakan kemampuan akselerometer untuk memperbarui data percepatan dalam periode waktu tertentu. Parameter ini penting untuk diperhitungkan pada aplikasi akselerometer untuk mengukur jarak atau navigasi.
2.4.2.
Giroskop Elektronik
Sensor giroskop adalah sensor yang dapat mengukur kecepatan angular dari sebuah objek di mana sensor ini terpasang. Sensor ini sering digunakan pada sistem navigasi pesawat untuk menentukan arah hadap.
Pembahasan giroskop pada tugas akhir ini hanya dibatasi pada giroskop elektronik (prinsip kerjanya dan parameter-parameternya), agar pembahasan tidak melebar.
2.4.2.1.Prinsip Kerja Giroskop Garpu Tala
Ada banyak metode untuk mendeteksi kecepatan sudut, antara lain vibrating ring gyroscope, tuning fork gyroscope, macro laser ring gyroscope dan piezoelectric plate gyroscope. Metode yang paling banyak digunakan dan diproduksi sampai sekarang adalah giroskop garpu tala Draper2 (Draper tuning fork).
2
Giroskop garpu tala dibuat dengan memanfaatkan resonansi dari dua buah resonantor yang bergetar yang disebabkan oleh efek Coriolis3. Efek Coriolis adalah defleksi yang timbul
pada kerangka acuan rotasi yang besarnya berbanding lurus dengan kecepatan rotasi. Fenomena ini dijelaskan sebagai berikut:
Gambar 2.15. Meriam pada Piring Besar yang Berputar.
Misal ada sebuah meriam pada pusat sebuah piring besar yang dapat berputar seperti pada Gambar 2.15. Saat piring besar tersebut tidak berputar dan peluru ditembakan dari pusat piring, pada umumnya peluru tersebut bergerak lurus dari pusat piring. Tetapi ketika piring besar tersebut berputar dan meriam menembakan sebuah peluru, maka peluru tersebut tidak memiliki lintasan lurus (seperti saat piring besar tidak berputar) tetapi berbelok. Hal ini disebabkan karena adanya pengaruh rotasi piring terhadap gerak dari peluru. Semakin cepat piring berputar, semakin besar pula pembelokan peluru yang terjadi. Fenomena inilah yang disebut dengan efek Coriolis.
3Coriolis efect, pertama kali dikemukakan oleh seorang ilmuwan Perancis bernama Gaspard-Gustave Coriolis
Gambar 2.16. Efek Coriolis pada Giroskop Garpu Tala.
Pada Gambar 2.16, jika ada benda bergerak dengan kecepatan
v
searah sumbu y, dan mendapat pengaruh rotasi dengan kecepatan sudut
pada sumbu z maka akan timbul akselerasi Coriolis
cor yang searah dengan sumbu x:2
cor
v
MEMS Gyroscope dibangun berdasarkan prinsip Coriolis pada sebuah garpu tala yang bergetar seperti pada Gambar 2.16. Jika garpu tala pada Gambar 2.16 digetarkan pada sumbu y dan garpu tala tersebut diputar pada sumbu z, maka dengan prinsip Coriolis akan timbul getaran juga pada arah sumbu x. Semakin cepat garpu tala ini diputar, maka akan semakin besar getaran yang dirasakan pada sumbu x. Selanjutnya dengan rangkaian elektronik getaran pada sumbu x ini dikonversikan ke dalam besaran elektrik sehingga kecepatan putar dapat dengan mudah diukur dan diolah.
(2.11)
v
cor
y
x
z
vibrasi
rotasi yang diukur
Dengan teknologi MEMS, sangat dimungkinkan untuk membuat giroskop dalam ukuran sangat kecil, meskipun di dalamnya terdapat sistem mekanik yang rumit. Gambar[] menunjukan foto mekanik giroskop garpu tala Draper dengan teknologi MEMS.
Gambar 2.17. Prototipe Pertama MEMS Gyroscope Garpu Tala Draper Laboratory
Seiring dengan berkembang pesatnya teknologi MEMS, membuat MEMS gyroscope menjadi semakin kecil, kompak dan murah. Banyak produsen komponen elektronik yang mengembangkan MEMS gyro ini, diantaranya adalah ST Microelectronics, Analog Device dan InvenSense.
2.4.2.2.Sumbu Pengukuran Giroskop
Sama halnya dengan akselerometer, giroskop memiliki sumbu pengukuran. Rotasi dideteksi berdasarkan sumbu pengukuran yang menjadi poros rotasi.
Pada penggunaannya dalam AHRS pada Tugas Akhir ini digunakan giroskop dengan tiga sumbu pengukuran seperti pada Gambar 2.18.
Gambar 2.18. Sumbu Pengukuran Digital Gyroscope ITG3205[4]
2.4.2.3.Parameter Sensor Giroskop
Sensor gyroscope memiliki beberapa parameter yang menentukan karakteristik dan kualitas dari sensor ini:
1. Resolusi
Resolusi dari gyroscope merupakan kecepatan putar minimum yang dapat dideteksi oleh sensor. Pada gyroscope dengan keluaran data digital, resolusi dinyatakan dalam satuan bit terkecil per kecepatan putar atau LSB/(°/s). Giroskop dengan resolusi tinggi dapat mendeteksi perubahan orientasi yang kecil.
2. Full-scale Range
3. ZRO(Zero Rate Output)
Zero Rate Output pada sensor gyroscope merupakan besarnya keluaran sensor saat diam (tidak berotasi). Dalam implementasinya untuk mengukur arah hadap, yaitu dengan mengintegralkan kecepatan sudut (keluaran gyroscope), keluaran giroskop harus di-offset dengan ZRO-nya terlebih dahulu agar nilai ZRO ini tidak ikut diintegralkan dari waktu ke waktu.
4. Short- or Long-term Drift
Pada saat diam, meskipun sudah di-offset dengan ZRO, data keluaran sensor gyroscope tidak akan tetap 0°/s, tapi berubah-ubah. Perubahan ini kecil dan dengan frekwensi yang lambat, akan tetapi sangat terasa nantinya jika diintegralkan dalam jangka waktu yang lama. Short- or Long-term Drift merupakan nilai peak-to-peak dari keluaran giroskop saat tidak ada rotasi.
5. Jumlah sumbu pengukuran
Ada banyak gyroscope yang diproduksi yang memiliki lebih dari satu sumbu pengukuran. Misalnya LPY503AL produksi ST Microelectronics[20] memiliki 2 sumbu pengukuran dan ITG3205 produksi Invensense[19] memiliki 3 sumbu pengukuran.
2.4.3.
Orientasi Kinematik
Pada bagian ini akan membahas perhitungan kinematis dari orientasi pesawat terhadap bumi yang direpresentasikan dengan rotasi matrik.
2.4.3.1.Sistem Koordinat
Orientasi kinematik selalu berkaitan dengan perhitungan orientasi relatif dari sistem koordinat lokal pesawat (body frame) ke sistem koordinat bumi (ground frame)[12]. Setiap sensor pada pesawat baik akselerometer maupun giroskop bekerja pada sistem koordinat lokal pesawat, sedangkan orientasi dari pesawat yang berkaitan erat dengan gaya gravitasi bumi ditilik dari sistem koordinat bumi.
Gambar 2.19. Body Frame dan Ground Frame
Pada sistem koordinat bumi, vektor satuan I, J dan K ditulis sebagai:
1
0
0
0 ,
1 ,
0
0
0
1
I
J
K
Pada sistem koordinat lokal, vektor satuan i, j dan k ditulis sebagai:
1
0
0
0 ,
1 ,
0
0
0
1
i
j
k
2.4.3.2.Representasi Orientasi dengan Rotasi Matrik
Pada bagian ini akan dibahas bagaimana merepresentasikan vektor pada sistem koordinat lokal ke sistem koordinat bumi dan sebaliknya.
Vektor i jika dilihat dari sistem koordinat bumi dinotasikan sebagai
i
G: G x G G y G zi
i
i
i
Selanjutnya,
i
xGpada sistem koordinat bumi merupakan proyeksi vektor
i
ke sumbu X pada sistem koordinat bumi:cos( , )
G x
i
i
X i
cos( , )
G x
i
i
I i
Di mana
cos( , )
X i
merupakan nilai kosinus sudut yang dibentuk vektor
I
dan
i
.(2.12)
(2.13)
(2.14)
(2.15)
Karena panjang vektor satuan
I
dan
i
bernilai 1, maka:cos( , )
G x
i
I i
atau bisa ditulis:
cos( , )
G x
i
I i
I i
G x
i
I i
Dengan cara yang sama pada
i
yG dani
zG diperoleh: Gy
i
J i
G z
i
K i
Sehingga vektor
i
G dapat ditulis:G
I i
i
J i
K i
Dengan cara yang sama pada
j
G dank
G didapatkan:G
I j
j
J j
K j
, G
I k
k
J k
K k
Selanjutnya dibentuk matrik
R
G dari vektori
G,
j
G dank
G :G G G G
R
i
j
k
G
I i
I j
I k
R
J i J j J k
K i K j K k
cos( , ) cos( , ) cos( , )
cos( , ) cos( , ) cos( , )
cos( , ) cos( , ) cos( , )
G
I i
I j
I k
R
J i
J j
J k
K i
K j
K k
Dengan cara yang sama, vektor satuan pada sistem koordinat bumi (
I
G,
J
G ,K
G ) jika ditilik dari sistem koordinat lokal dapat diperoleh dengan mengganti notasi I, J, K menjadi i, j, k:B
I i
I
I j
I k
, B
J i
J
J j
J k
, B
K i
K
K j
K k
Sehingga, jika dibentuk dalam sebuah matrik
R
B menjadi:B B B B
R
I
J
K
B
I i J i K i
R
I j J j K j
I k J k K k
cos( , ) cos( , )
cos( , )
cos( ,
cos( , ) cos( , )
cos( ,
cos( , ) cos( , )
B
I i
J i
I i
R
I j
J j
J j
I k
J k
K k
Matrik
R
BdanR
G merupakan Direction Cosine Matrix (DCM) karena berisi kosinus dari semua kemungkinan kombinasi vektor satuan pada sistem koordinat bumi dan sistem koordinat lokal. DCM disebut juga matrik rotasi karena mendefinisikan rotasi dari kerangka acuan satu ke kerangka acuan lainnya.Dengan DCM, vektor pada sistem koordinat lokal dapat didefinisikan pada sistem koordinat bumi dan sebaliknya. Ditinjau vektor
r
pada sistem koordinat lokal:B x B B y B z
r
r
r
r
Vektor
r
akan dihitung pada sistem koordinat bumi dengan memanfaatkan DCM. Pada sistem koordinat bumi vektorr
dinotasikan:G x G G y G z
r
r
r
r
Ditinjau salah satu komponen vektor
r
xG sebagai proyeksi vektorr
terhadap sumbu X (koordinat bumi):cos( , )
G G G G
x
r
r
I r
Karena rotasi tidak mengubah panjang vektor dan sudut antara dua vektor, maka:
G B
r
r
(2.30)
(2.31)
(2.32)
(2.33)
1
G B
I
I
cos( , ) cos( , )
I r
G G
I r
B BSehingga persamaan 2.32 dapat ditulis:
cos( , )
G B B B B
x
r
I r
I r
G B B x
r
I r
Berdasarkan persamaan 2.21:
G x G G x y G z
I i
r
r
I j r
I k r
( )
(
)
(
)
G B B B
x x y z
r
I i r
I j r
I k r
Dengan cara yang sama didapatkan:
( )
(
)
(
)
G B B B
y x y z
r
J i r
J j r
J k r
(
)
(
)
(
)
G B B B
z x y z
r
K i r
K j r
K k r
Sehingga jika dituliskan dengan matrik:
B x G B y B z
I i
I j
I k r
r
J i J j J k r
K i K j K k r
G G B
r
R r
Pada persamaan 2.43 dapat dicermati bahwa vektor
r
pada sistem koordinat lokal ( Br
) dirotasikan oleh
R
G menjadi vektorr
G pada sistem koordinat bumi. Vektorr
yang bekerja pada sistem koordinat lokal pesawat bisa berupa kecepatan translasi, kecepatan sudut, gaya, percepatan dan vektor-vektor lainnya.Untuk mempermudah penulisan dan membedakan setiap komponen pada
R
G dan BR
, digunakan notasi sebagai berikut:Xx Xy Xy G
Yx Yy Yz
Zx Zy Zz
r
r
r
R
r
r
r
r
r
r
( )
Xx Yx Zx B G T
Xy Yy Zy
Xz Yz Zz
r
r
r
R
R
r
r
r
r
r
r
2.4.3.3.Rotasi Matrik dan Sudut Euler
Sudut Euler adalah 3 sudut yang membentuk rotasi sebuah objek dalam ruang (
3). Sehingga dibutuhkan 3 parameter untuk merepresentasikan orientasi sebuah objek pada sistem 3 dimensi Sudut-sudut itu antara lain: rotasi dengan sumbu rotasi sumbu x, disebut dengan roll (φ)
rotasi dengan sumbu rotasi sumbu y, disebut dengan pitch (θ)
rotasi dengan sumbu rotasi sumbu z, disebut dengan yaw (ψ)
Dalam kaitannya dengan rotasi matrik, ketiga sudut Euler ini dapat membentuk rotasi matrik dengan persamaan 2.46:
cos cos sin cos cos cos sin cos sin cos sin sin
cos sin sin sin sin cos sin sin sin cos
sin sin cos cos cos
R
Hal yang perlu diperhatikan pada pembentukan rotasi matrik dengan 3 sudut Euler (atau sebaliknya) adalah urutan rotasi, karena urutan rotasi yang berbeda membentuk orientasi yang berbeda, meskipun besarnya sudut-sudut pembentuk sama besarnya. Pada persamaan 2.46, urutan yang dipakai adalah z-y-x atau yaw-pitch-roll.
2.4.4.
Algoritma DCM-IMU (Direction Cosine Matrix Inertial Measurement
Unit)
Peran utama dari AHRS adalah mengolah data-data sensor untuk menghasilkan tiga sudut Euler (roll, pitch dan yaw) yang tepat dan akurat. Sudut-sudut ini merupakan representasi orientasi pesawat di udara terhadap kerangka acuan bumi. Selanjutnya, data tiga sudut ini dimanfaatkan oleh pengendali gerak motor sebagai masukan umpan balik dari sistem kendali loop tertutup.
Sebenarnya, sensor akselerometer dapat digunakan untuk mengukur sudut roll dan pitch, dengan menghitung arah percepatan gravitasi. Namun, ada tiga alasan yang menyebabkan sensor ini tidak bisa langsung digunakan sebagai sumber informasi tunggal untuk orientasi pesawat:
1. Pengaruh percepatan dinamis
Percepatan yang bekerja pada pesawat bukan hanya percepatan gravitasi, tetapi juga percepatan dinamis. Pesawat tidak akan hanya melayang dan diam (hovering), tetapi juga bergerak dan timbul percepatan dinamis yang dirasakan oleh akselerometernya. Sehingga percepatan dinamis akan mengganggu pengukuran percepatan statis (gravitasi bumi), yang mengakibatkan pengukuran arah percepatan gravitasi menjadi tidak akurat.
Akan tetapi, pesawat tidak akan selalu mengalami percepatan atau perlambatan. Ada kondisi di mana pesawat bergerak dengan kecepatan konstan. Pada kondisi ini, arah percepatan gravitasi dapat diukur, karena tidak ada percepatan dinamis yang bekerja pada akselerometer.
2. Pengaruh vibrasi
3. Keterbatasan pengukuran sudut yaw
Akselerometer hanya mendeteksi arah percepatan gravitasi untuk mendapatkan sudut roll dan pitch. Pada saat akselerometer dalam kondisi mendatar, tidak ada proyeksi percepatan gravitasi untuk mendapatkan sudut yaw.
Berbeda dengan akselerometer, giroskop hampir tidak terpengaruh oleh getaran dan percepatan dinamis translasi. Keluaran dari giroskop merupakan kecepatan sudut, integral terhadap waktu dari keluaran giroskop ini adalah sudut. Namun karena giroskop memiliki short-or-long term drift, semakin lama hasil integral tidak akan menghasilkan sudut yang tepat.
Gambar 2.20. Blok Diagram Algoritma DCM-IMU
2.4.4.1. Pembentukan Rotasi Matrik dari Kecepatan Sudut Giroskop
Rotasi matrik dapat dibentuk dengan perubahan sudut sesuai dengan persamaan 2.47:
0
(
)
( )
( )
0
0
z y
G G G z x
y x
d
d
R t dt
R t
R t
d
d
d
d
1
(
)
( )
1
1
z y
G G z x
y x
d
d
R t dt
R t
d
d
d
d
karena,d
dt
maka,(2.47)
(2.48)
(2.49)
giroskop +
-
ω updaterotasi
matrik
normalisasi
R R R→Euler
roll(φ)
pitch(θ)
yaw(ψ)
kontrol PI
detektor drift akselerometer
magnetometer
drift error vektor gravitasi
1
(
)
( )
1
1
z y
G G z x
y x
dt
dt
R t dt
R t
dt
dt
dt
dt
dimana,RG= matrik rotasi
x
=kecepatan sudut pada sumbu xy
=kecepatan sudut pada sumbu yz
=kecepatan sudut pada sumbu zDengan persamaan 2.50, rotasi matrik dapat dibentuk dengan data kecepatan sudut pada giroskop. Namun, karena adanya kemungkinan numerical error pada pembacaan sensor giroskop, menyebabkan rotasi yang dibentuk tidak memenuhi orthogonalitas matrik rotasi. Sehingga perlu dilakukan koreksi orthogonalitas dan normalisasi.
Matrik rotasi memiliki vektor-vektor baris yang saling tegak lurus. Seharusnya, perkalian dot antar vektor baris pada matrik rotasi bernilai 0, karena adanya numerical error pada pembacaan giroskop menyebabkan vektor-vektor baris (juga berlaku pada kolom) dari matrik rotasi tidak saling tegak lurus dan perkalian dot antar vektor baris ini ≠ 0.
Yx Yy Yz Xx Xy Xz
r
r
r
r
error X Y
r
r
Selanjutnya untuk mengatasi kondisi ini, setengah dari error dibagikan kepada kedua vektor baris:
2
Yx orthogonal Yy Yz orthogonalr
error
r
Y
Y
X
r
Untuk memperoleh Zorthogonal, digunakan cross product dari kedua vektor baris yang sudah
orthogonal:
orthogonal orthogonal orthogonal
Z
X
Y
Langkah selanjutnya adalah menjaga magnitude dari masing-masing vektor agar bernilai 1. Salah satu cara yang bisa dilakukan adalah membagi setiap vektor baris dengan magnitude-nya. Cara ini kurang efektif jika diimplementasikan dalam mikrokontroler dengan keterbatasan memori dan kecepatan, karena melibatkan operasi akar dalam mencari
(2.52) (2.53) (2.54) (2.55)
2
Xx orthogonal Xy Xz orthogonalr
error
r
X
X
Y
magnitude. Cara alternatif yang dapat dipakai adalah dengan menggunakan ekspansi Taylor untuk memastikan magnitude dari setiap vektor baris agar bernilai 1.
1 3
2
norm orthogonal orthogonal orthogonal
X
X
X
X
1 3
2
norm orthogonal orthogonal orthogonal
Y
Y
Y
Y
1 3
2
norm orthogonal orthogonal orthogonal
Z
Z
Z
Z
2.4.4.2.Koreksi Drift
Pada proses sebelumnya telah didapatkan matrik rotasi bentukan giroskop yang orthogonal. Namun, matrik rotasi ini belum akurat untuk merepresentasikan orientasi pesawat terhadap kerangka acuan bumi, karena orientasi pesawat pada saat sistem mulai bekerja belum diketahui. Masalah kedua adalah drift dan error kuantisasi dari pembacaan giroskop menyebabkan rotasi matrik merambat berubah tidak sesuai dengan kenyataan fisik. Untuk mengatasi masalah tersebut digunakan akselerometer sebagai referensi arah percepatan gravitasi.
Jika diasumsikan tidak ada percepatan dinamis yang bekerja pada pesawat, dari data akselerometer didapatkan vektor gravitasi yang terukur pada sistem koordinat lokal pesawat:
B x
B B
y B
z
A
A
A
A
(2.56)
(2.57)
(2.58)
Berdasarkan rotasi matrik yang telah terbentuk, vektor gravitasi pada sistem koordinat bumi jika dilihat dari sistem koordinat lokal adalah:
0
0
1
B BG
R
0
0
1
Xx Yx Zx B
Xy Yy Zy
Xz Yz Zz
r
r
r
G
r
r
r
r
r
r
Zx B Zy Zzr
G
r
r
Seharusnya vektor
A
B danG
B akan sama jika rotasi matrik yang dibentuk adalah tepat. Tetapi karena adanya error yang telah disinggung sebelumnya, error pitch roll diperoleh dengan cross product dari kedua vektor:_ B B
roll pitch
error
A G
Kesalahan pada sudut roll dan pitch dapat dideteksi dengan menggunakan persamaan 2.63. Selanjutnya untuk mendeteksi error yaw digunakan arah hadap dari kompas digital.
(2.60)
(2.61)
(2.62)
Jika vektor
M
B merupakan vektor arah utara magnet bumi pada sistem koordinat lokal pesawat:B x
B B
y B
z
M
M
M
M
Dan vektor
U
G merupakan vektor arah utara pada sistem koordinat bumi:1
0
0
G
U
Maka dengan cara yang sama error yaw diperoleh:
B B
yaw
error
M
U
Selanjutnya error keseluruhan didapatkan:
_ _ _
roll pitch yaw roll pitch yaw
error
error
error
Untuk mengkompensasi kesalahan rotasi matrik yang terbentuk, error yang dideteksi melalui perhitungan sebelumnya diumpankan ke proses pembentukan matrik rotasi dengan kontrol PI (propotional-integral). Penggunaan kontrol loop tertutup ini bertujuan untuk mendapatkan koreksi yang cepat dan tepat terhadap rotasi matrik yang dibentuk.
(2.64)
(2.65)
(2.66)
2.4.4.3.Perhitungan 3 Sudut Euler dari Matrik Rotasi
Sudut-sudut Euler merupakan representasi orientasi yang tepat dan mudah diiplementasikan sebagai input kendali gerak pesawat. Sebagai contoh, untuk menjaga keseimbangan pesawat saat dalam kondisi hovering (melayang diam), sistem kendali gerak harus menjaga sudut pitch dan roll agar tetap 0° (datar terhadap permukaan bumi).
Setelah matrik rotasi sudah terbentuk dan terkoreksi, selanjutnya dengan persamaan 4, dari matrik rotasi ini didapatkan sudut-sudut Euler:
arctan
ZyZz
r
r
arcsin
r
Zx
arctan
YxZx
r
r
(2.68)
(2.69)
![Gambar 2.5. Struktur Mekanis dan Elektik Motor BLDC 3 fasa[18]](https://thumb-ap.123doks.com/thumbv2/123dok/785724.583232/7.612.99.522.216.498/gambar-struktur-mekanis-dan-elektik-motor-bldc-fasa.webp)