i
LAPORAN TAHUNAN/AKHIR
PENELITIAN HIBAH BERSAING
JUDUL:
PENGEMBANGAN UNIT ROBOT LENGAN LENTUR DUA-LINK SEBAGAI SARANA PENGEMBANGAN KOMPETENSI BIDANG OTOMASI DAN ROBOTIKA GURU-GURU SMK JURUSAN LISTRIK DAN ELEKTRONIKA
Tahun kedua dari rencana tiga tahun
Ketua : Moh. Khairudin, PhD. (NIDN : 0012047901) Anggota Tim : Zamtinah, M.Pd (NIDN : 0017026205)
T.H. Trimaryadi (NIDN : 0006046804)
v
RINGKASAN
PENGEMBANGAN UNIT ROBOT LENGAN LENTUR DUA-LINK SEBAGAI SARANA PENGEMBANGAN KOMPETENSI BIDANG OTOMASI DAN ROBOTIKA GURU-GURU SMK JURUSAN LISTRIK DAN ELEKTRONIKA
Moh Khairudin, TH Trimaryadi, Zamtinah
Robot lengan lentur dua-link (RLLDL) merupakan jenis robot lengan dengan material lengan yang lentur (flexible). Robot lengan lentur dua-link digunakan dalam aplikasi eksplorasi ruang angkasa dikarenakan memiliki material tipis dan ringan. Juga digunakan untuk membantu manusia dalam aktivitas yang rawan bahaya seperti eksplorasi bawah tanah, proses operasi pembedahan mikro dan pemeliharaan peralatan nuklir. RLLDL ini belum pernah ada di lingkungan kampus Indonesia sebagai alat peraga untuk pengembangan kompetensi dalam bidang otomasi dan robotika.
Penelitian ini ditujukan sebagai rangkaian Tri Dharma Perguruan Tinggi sebagai berikut: Pertama perancangan dan manufacturing unit RLLDL melalui penelitian rancang bangun. Uji fungsional robot dengan data kinerja robot telah dipublikasikan di jurnal internaisonal dan seminar internasional; Hasil performa robot yang memuaskan akan dilanjutkan dengan tujuan tahun kedua adalah penyusunan manual robot, silabus, RPP, modul dan labsheet untuk mengimplementasikan Unit RLLDLsebagai media pendidikan di Jurusan Pendidikan Teknik Elektro FT UNY, sehingga diperoleh data tentang efektivitas dan kendala yang akan terjadi beserta solusinya. Adapun tujuan jangka panjang dari penelitian ini adalah dengan digunakannya unit ini sebagai salah satu media pendidikan (alat bantu pengajaran) maka mahasiswa, guru dan siswa SMK Jurusan listrik dan elektronika akan mempunyai kompetensi bidang otomatisasi dan robotika yang sangat dibutuhkan di masa mendatang terlebih pada era kecanggihan teknologi ini.
Metode penelitian yang digunakan pada tahap penyusunan manual robot, modul, jobsheet, dan lembar evalauai PBM Unit RLLDLk adalah Quasy eksperimen, sedang pada tahap implementasi alat tersebut di dalam PBM digunakan pendekatan penelitian eksperimen.Lokasi kegiatan penelitian dilakukan di Laboratorium Robotika Jurusan pendidikan Teknik Elektro FT UNY, kegiatan sosialisasi, pendidikan dan latihan bagi guru SMK dilaksanakan di Lembaga Pengabdian Pada Masyarakat UNY. Sedangkan implementasi RLLDL di SMK dilaksanakan di empat SMK negeri dan swasta yang dipandang potensial untuk mengembangkan Unit RLLDL.
Pencapaian target tahun pertama adalah telah terbentuk Unit RLLDL dengan publikasi di jurnal internasional dan seminar internasional. Adapun target (1) Tahun pertama: dapat dihasilkan Unit RLLDLk yang siap digunakan sebagai media pendidikan, baik di Jurusan Pendidikan Teknik Elektro FT UNY maupun di SMK; (2) Tahun kedua: dapat dihasilkan manual robot, silabus, RPP, modul dan labsheet beserta instrumen evaluasinya, dan data efektivitas & model penerapan unit alat tersebut di dalam PBM. Selanjutnya bagi guru maupun siswa peserta pelatihan, akan dsertakan dalam uji kompetensi maupun sertifikasi di LSP Bidang Otomasi dan Kendali Industri.
vi PRAKATA
Puji syukur kami haturkan kepada Allah YME, dengan rahmat-Nya dan hidayah-Nya kami dapat menyelesaikan penelitian ini dengan lancar dan baik. Kami ucapakan terima kasih kepada LPPM UNY yang telah menjadi wadah bagi peneliti untuk mengakses dana desentralisasi. Terima kasih juga kami sampaikan kepada Program Studi Pendidikan Teknik Elektro yang telah memberikan fasilitas laboratorium sehingga penelitian ini terlaksana dengan baik. Kami sampaikan juga terima kasih kepada para mahasiswa Program Studi Pendidikan Teknik Elektro yang telah membantu jalannya penelitian ini. Juga kami sampaikan kepada semua pihak yang telah memberikan dukungan material dan imaterial kami ucapkan terima kasih.
Penelitian ini perlu banyak pengembangan dan penyempurnaan oleh karena itu masukan dan saran sangat kami harapkan. Terutama sekali masukan terhadap konten penelitian dalam pengembangan media pembelajaran bidang robotika.
Yogyakarta, 27 Oktober 2014
vii
DAFTAR ISI
HALAMAN JUDUL ... i
RINGKASAN ... ii
DAFTAR ISI ... iii
PRAKATA ... iv
BAB I : PENDAHULUAN A. Latar Belakang ... 1
B. Batasan dan Rumusan Masalah ... 1
C. Tujuan Penelitian ... 2
BAB II : TINJAUAN PUSTAKA ... 3
BAB III : TUJUAN DAN MANFAAT PENELITIAN ... 11
BAB IV : METODE PENELITIAN ... 12
BAB V : HASIL DAN PEMBAHASAN ... 15
BAB VI : KESIMPULAN DAN SARAN ... 19
DAFTAR PUSTAKA ... 20
LAMPIRAN a. Log book ... 21
b. Instrument ... 24
c. Personalia tenaga peneliti beserta kualifikasi ... 28
1 Bab I PENDAHULUAN
A. Latar Belakang
Penelitian ini melakukan terobosan manufacturing robot lengan lentur dua-link
dengan proses yang jauh lebih murah dan kualitas hampir sama dibandingkan dengan pembelian modul yang sudah jadi.
Robot lengan lentur dua-link yang dirancang dalam penelitian ini juga sangat potensial dilakukan diversifikasi fungsi sesuai misi Tri Dharma Perguruan Tinggi, meliputi dharma pendidikan dan pengajaran dengan asumsi bahwa alat ini digunakan sebagai media pendidikan dalam rangka meningkatkan kompetensi peserta didik; dharma penelitian asumsinya adalah bahwa alat ini didesain dan dibuat melalui penelitian rancang bangun dan eksperimen; sedangkan pemanfaatan alat ini ditinjau dari fungsi dharma pengabdian pada masyarakat adalah melalui kegiatan penyuluhan, pendidikan, dan latihan desain, manufakturing, dan pengoperasian robot lengan lentur dua-link.
Dengan terbangunnya robot lengan lentur dua-link maka peneliti bermaksud akan menawarkan untuk dapat melanjutkan penelitian ke tingkat lanjut yaitu dengan bekerjasama penelitian bersama kampus di luar negeri, karena penelitian tentang robot lengan lentur dua-link masih menjadi issue hangat di beberapa jurnal international.
B. Batasan dan Rumusan Masalah
1) Untuk mengatasi kelangkaan teknisi bidang robot lengan, lembaga pendidikan sejenis dan yang relevan (SMK atau perguruan Tinggi) sudah saatnya dilengkapi dengan fasilitas unit robot lengan lentur dua-link, terutama yang didesain untuk media pendidikan dan latihan.
2) Sehingga batasan masalah tahun pertama adalah bagaimana melakukan rancang bangun unit robot lengan lentur dua-link.
3) Dibanding produk sejenis yang sudah ada di pasaran, unit robot lengan lentur
2
segi harga yang dapat dikatakan sangat kompetitif dan lebih terjangkau untuk kalangan lembaga pendidikan. Berdasar survei pasar, harga robot lengan lentur dua-link berkisar 600 juta rupiah, sedangkan unit robot lengan lentur dua-link hasil kegiatan ini diperkirakan seharga 40 juta.
4) Unit robot lengan lentur dua-link ini juga sangat potensial dilakukan diversifikasi fungsi sesuai misi Tri Dharma Perguruan Tinggi, meliputi dharma pendidikan dan pengajaran dengan asumsi bahwa alat ini digunakan sebagai media pendidikan dalam rangka meningkatkan kompetensi peserta didik dalam latihan desain, manufakturing, dan pengoperasian Unit robot lengan lentur dua-link kepada guru-guru SMK.
C. Tujuan Penelitian
1) Menghasilkan unit robot lengan lentur dua-link yang dapat digunakan sebagai media pendidikan.
2) Menghasilkan modul pelatihan sesuai analisis skill yang diperlukan untuk menguasai kompetensi mendesain dan mengoperasikan Unit robot lengan lentur dua-link.
3) Menghasilkan instrumen evaluasi sesuai analisis skill atau kompetensi yang harus dimiliki peserta pelatihan
4) Menghasilkan model pembelajaran unit robot lengan lentur dua-link yang efektif 5) Dapat dilaksanakan pelatihan pemanfaatan unit robot lengan lentur dua-link bagi
guru SMK Kelompok Teknologi Industri negeri dan swasta di Kota Yogyakarta. 6) SMK yang potensial dan dipilih sebagai pilot proyek mampu
mengimplementasikan unit robot lengan lentur dua-link sebagai media pendidikannya.
3 Bab II
TINJAUAN PUSTAKA
Penggunaan robot lengan lentur lebih menguntungkan dibandingkan robot lengan biasa, dikarenakan robot lengan lentur hanya memerlukan material tipis, lebih ringan, lebih hemat dalam konsumsi daya, aktuator yang kecil, lebih mudah dioperasikan, serta lebih murah dalam proses manufacturing (Subudhi and Morris, 2002). Jenis robot lengan lentur ini digunakan dalam banyak aplikasi mulai dari proses pengahantaran barang bawaan, operasi pembedahaan mikro, pemeliharaan peralatan nuklir dan sangat cocok untuk robot ruang angkasa (Dwivedy and Eberhard, 2006).
A. Robot Lengan Lentur Dua-Link
Pemilihan menggunakan robot lengan lentur dua-link pada aplikasi yang praktis, karena jenis robot ini menyediakan banyak kelenturan dan flexibilitas. Sehingga proses pengendalian dan menjaga keakuratan posisi kondisi lengan adalah pekerjaan yang sangat menantang. Hal ini sangatlah penting untuk melacak sifat kelenturan alamiah dari bahan material yang tipis dengan model matematis(Mohamed et al., 2005).
4
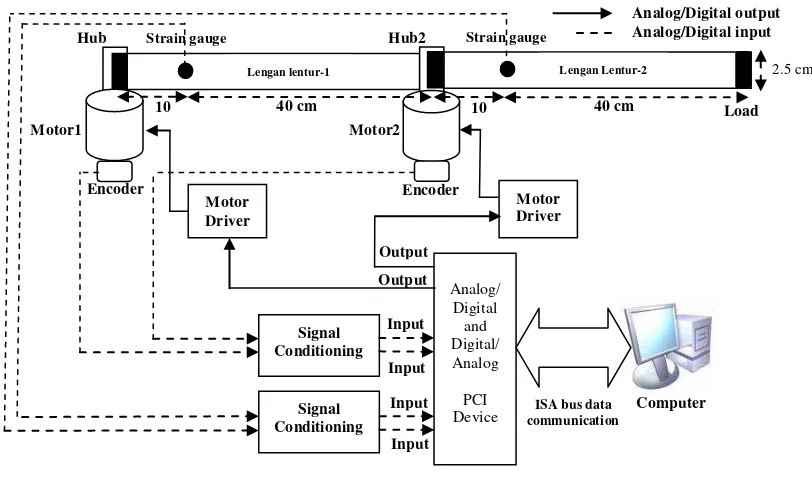
Adapun system robot lengan lentur dua-link pada penelitian ini adalah sebagai berikut:
Gambar 1: Skema diagram robot lengan lentur dua-link
Gambar di atas memberikan ilustrasi bahwa kelenturan lengan menjadi hal yang subtansi dengan perhitungan yang valid sehingga mampu menopang beban benda bawaan sebagaimana pada robot lengan biasa. Munurut Mohammed et al. (2005), robot lengan lentur adalah jenis robot lengan lentur terdiri dari:
1. Lengan lentur, adapun spesifikasi lengan lentur yang akan dirancang dapat dilihat dalam Tabel 1:
Tabel 1: Parameter lengan lentur pada robot lengan lentur dua-link (diambil dari Khairudin et al., 2010)
Lengan lentur-1 Lengan Lentur-2
5
l1, l2 Panjang link 0.5 0.5 m
Lebar of link 0.03 0.025 m
Ketebalan of link 2 x10-3 1.49 x10-3 m
Jo1 , Jo2 Moment inertia 5 x10-3 3.125 x10-3 kgm2
Mh2 Massa pusat rotor - 0.155 kg
2. Peralatan sensor, sensor-sensor yang digunakan dalam robot lengan lentur dua-link
terdiri dari: 1) encoder yang terdiri dari 2 buah, yaitu sebagai sensor putaran motor pada setiap motor link-1 dan link-2. Pada penelitian ini direncanakan menggunakan encoder HEDL-5540 dan HEDS-5540. 2) strain gauge adalah sensor untuk mengukur pembelokan pada kelenturan setiap link. 3) accelerometer sebagai sensor kecepatan pada gerakan ujung link-2. 4) limit switch, sebagai pembatas pada gerakan putaran robot pada papan kerja robot.
3. Motor driver dan amplifier, dua jenis motor DC sebagai penggerak setiap link, dilengkapi dengan driver dan amplifier. Rencana akan digunakan motor DC tipe RE 40 dan RE 35.
4. Interfacing Card dan digital processing, untuk interfacing card direncanakan akan menggunakan PCI 6221 yang akan terhubung dengan komputer sebagai proses kendalinya. Sebagai pemroses data awal dari sensor akan dilengkapi dengan signal conditioning. Signal conditioning untuk input sensor strain-gauge dan input encoder serta accelerometer.
5. Power supply, sebagai sumber dari semua motor penggerak dan sensor-sensor yang diperlukan.
B. Indikator Kerja
6
Sehingga diharapkan dengan software matlab, saat pengoperasian bermula maka signal yang ditangkap dalam software matlab harus bernilai sama dengan signal yang diukur secara manual melalui multimeter digital. Data yang diperoleh dari pengukuran langsung malalui data akuisisi (DAQ card) selanjutnya diolah untuk difeedback kembali ke motor sebagai penggerak robot.
Indikator kinerja model unit robot lengan lentur dua-link untuk kegiatan pembelajaran diharapkan sebagai berikut:
Kondisi tanpa beban, ujung link kedua digerakkan tanpa beban digerakkan menggunakan computer dengan matlab, mahasiswa dan guru dapat mengamati bagaimana respon robot saat tanpa beban bawaan. Respon system dapat diamati secara langsung melalui tampilan simulink-matlab sehingga dapat mengamati ecara langsung apakah ada perbedaan respon yang terukur secara manual dengan yang terekod di software simulink-matlab.
Kondisi dengan beban minimal, ujung link kedua digerakkan beban yang minimal digerakkan menggunakan computer dengan matlab, mahasiswa dan guru dapat mengamati bagaimana respon robot saat dengan beban bawaan minimal. Respon system dapat diamati secara langsung melalui tampilan simulink-matlab sehingga dapat mengamati ecara langsung apakah ada perbedaan respon yang terukur secara manual dengan yang terekod di software simulink-matlab.
Kondisi dengan beban maksimal, ujung link kedua digerakkan beban yang maksimal digerakkan menggunakan computer dengan matlab, mahasiswa dan guru dapat mengamati bagaimana respon robot saat dengan beban bawaan maksimal. Respon system dapat diamati secara langsung melalui tampilan simulink-matlab
sehingga dapat mengamati ecara langsung apakah ada perbedaan respon yang terukur secara manual dengan yang terekod di software simulink-matlab dengan tanpa beban, beban minimal dan beban maksimal.
C. Kompetensi Robot Lengan Lentur Dua-Link dalam Pembelajaran Bidang
Otomasi.
7
pendidikan berdasarkan kompetensi adalah pengembangan silabus dan sistem pengajaran berdasarkan kebutuhan pengguna lulusan atau standar nasional (Parjono
dkk., 2003). Dengan demikian, acuan yang digunakan untuk mengembangkan silabus dan sistem pengujian adalah kompetensi yang ada di pasaran dunia kerja atau standar nasional.
Berdasarkan uraian di atas, suatu kurikulum dinamakan sebagai Kurikulum Berbasis Kompetensi apabila kurikulum dengan segala perangkatnya memiliki target atau tujuan agar siswanya mempunyai profil yang dapat menggambarkan penampilan tertentu secara bulat yang dapat diamati dan diukur taraf pencapaiannya.
Mata kuliah robotika program studi Pendidikan Teknik Elektro/Mekatronika S1, Fakultas Teknik Universitas Negeri Yogyakarta yang mempunyai kode (EKK240) termasuk mata kuliah elemen kompetensi keterampilan berkarya (MKB) pada konsentrasi Kendali Industri kurikulum 2002. Matakuliah robotika termasuk kelompok utama yang berbobot 2 SKS.
Tujuan mata kuliah robotika adalah untuk membekali mahasiswa memiliki kemampuan system kendali robot, meliputi: aplikasi system kendali loop terbuka, system kendali loop tertutup, system kendali cerdas pada robot, aplikasi sensor pada robot, actuator pada system robot dan menganilis system kinematika dan dinamika robot. Kemampuan di atas diharapkan mencakup pengetahuan, ketcrampilan, dan sikap yang dapat ditampilkan oleh mahasiswa sebagai hasil belajar mata kuliah praktek system kendali yang sesuai dengan kompetensi kendali industry di dunia kerja/ industri atau standar nasional.
Pembelajaran lengan robot dua-link yang memanfaatkan unit lengan robot dua-link
yang di kembangkan oleh dosen-dosen jurusan elektro secara umum dapat dimanfaatkan sebagai:
Latihan dan praktek, pengajar menyediakan materi latihan dan tugas praktek. Mahasiswa menguji pengetahuan dan mempraktekan pengetahuan secara mandiri dan kreatif.
Penjelasan, unit ini dimanfaatkan untuk pendukung menyampaikan materi sistem tenaga.
8
Memperhatikan beberapa manfaat Pembelajaran robot lengan lentur dua-link untuk pendidikan berbasis kompetensi yang dikembangkan oleh dosen-dosen jurusan elektro, maka kesulitan dalam pemahaman dan melaksanakan tugas robotika dapat diatasi, bahkan dapat meningkatkan motivasi belajar. Pada akhirnya dapat meningkatkan prestasi belajar dan dapat meningkatkan kemampuan mahasiswa dalam bidang otomasi dan robotika sesuai standar profesional.
D. Pembelajarann Unit Robot Lengan Lentur Dua-Link sebagai Sarana Pengembangan Kompetensi
Masalah yang sangat urgen dan aktual di bidang pendidikan dan kaitannya dengan dunia kerja adalah ketidaksiapan di hampir semua jenis dan jenjang pendidikan untuk memasuki dunia kerja. Khusus bagi pendidikan teknik permasalahan yang dipandang mengerucut adalah terbatasnya fasilitas praktik, sehingga di dalam pembelajarannya masih banyak diisi dengan materi yang bersifat teoritis.
Zamtinah dkk (2008) Pendidikan formal di seluruh dunia umumnya menghadapi empat kelemahan, yaitu: 1) secara kualitatif tidak sesuai dengan tugasnya untuk menyiapkan anak-anak muda untuk kehidupannya kelak; 2) kekurangan biaya dilihat dari pertumbuhan penduduk dan bahkan untuk meningkatkan rasio antara guru-pendidik; 3) kapasitasnya yang terbatas dalam menempatkan kembali lulusannya, disebabkan adanya rendahnya kualitas guru (juga pendidik lain) dan peralatan, serta sulitnya merubah sikap; dan 4) ada kesulitan dalam menyelaraskan nilai tradisional yang diwariskan masa lalu, dengan nilai yang lebih universal.
Serangkaian pendapat di atas nampak bahwa ada kesenjangan dunia pendidikan dengan dunia kerja. Perspektif konflik antara keduanya harus memusatkan perhatiannya pada upaya mencari titik temu (interface) sebagai jembatan penghubung antara lembaga pendidikan dengan dunia kerja.
Sebagaimana uraian pada sub bab terdahulu, unit robot lengan lentur dua-link
9 E. Sistem Pengajaran Bermodul
Keberhasilan peserta didik mencapai tujuan belajar yang diinginkan tergantung pada banyak factor yang bersumber pada kepribadiannya, yaitu : 1) bakat mahasiswa untuk sesuatu tugas kuliah (tingkat awal); 2) minat dan motivasi; 3) kemampuan belajar; 4) mutu pendidikan yang dikehendaki; dan 5) waktu belajar yang tersedia atau yang diperbolehkan (Zamtinah dkk, 2008).
Selanjutnya Utomo dan Ruijter memaparkan mengenai karakteristirk Sistem Pengajaran Bermodul seperti berikut:
a. Bahan kuliah dibagi dalam beberapa modul atau satuan studi
b. Masing-masing modul diuji tersendiri. Hasil ujian dapat membebaskan mahasiswa dari sebagian ujian akhir.
c. Sering hasil ujian itu juga menentukan apakah mahasiswa boleh mengikuti modul berikutnya. Kekurangan mahasiswa juga ditunjukkan (diagnostik). Sering dituntut penguasaan yang tinggi (70%) untuk lulus.
d. Urutan mempelajari modul tidak tetap, atau hanya untuk sebagian tetap. Tidak semua modul sama pentingnya.
e. Waktu yang digunakan mahasiswa untuk mempelajari modul dapat berubah-ubah. Mahasiswa yang lebih lambat dalam waktu yang sama hanya dapat menyelesaikan modul yang lebih sedikit dibandingkan dengan mahasiswa pandai.
f. Informasi tentang materi perkuliahan tersedia dalam berbagai bentuk (tertulis, kuliah, film, dan sebagainya).
Dari uraian di atas dapat disarikan beberapa keuntungan Sistem Pengajaran Bermodul, yaitu:
a. Motivasi mahasiswa meningkat karena setiap kali mengerjakan tugas dibatasi waktu yang jelas dan sesuai dengan kemampuannya.
b. Sesudah suatu modul selesai dosen dan mahasiswa mengetahui letak keberhasilan dan kegagalan mahasiswa.
c. Mahasiswa mencapai hasil yang sesuai dengan kemampuannya d. Beban perkuliahan terbagi dengan lebih merata sepanjang semester.
10
Selanjutnya Bashori (2000) menyebut motivasi berprestasi sebagai achievement orientation atau kecenderungan ke arah prestasi. Seseorang yang „kecenderungan berprestasinya‟ tinggi mempunyai ciri: ambisius, kerja keras, senang berkompetisi, tekun dalam meningkatkan kedudukan sosialnya, dan menempatkan penghargaan yang tinggi pada produktivitas dan kreativitas.
Menurut Goleman, ada empat sumber motivasi yang dapat meningkatkan kemampuan seseorang, yaitu:
1. Dorongan berprestasi, yaitu dorongan untuk meningkatkan atau memenuhi standar keunggulan. Orang dengan kecakapan ini:
Berorientasi pada hasil, dengan semangat juang tinggi untuk meraih tujuan dan memenuhi standar
Menetapkan sasaran yang menantang dan berani mengambil resiko yang telah diperhitungkan
Mencari informasi sebanyak-banyaknya guna mengurangi ketidakpastian dan mencari cara yang lebih baik.
Terus belajar untuk meningkatkan kinerja
2. Komitmen, yaitu menyelaraskan diri dengan sasaran kelompok atau lembaga. Orang dengan kecakapan ini:
Siap berkorban demi pemenuhan sasaran lembaga yang lebih penting Merasakan dorongan semangat dalam misi yang lebih besar
Menggunakan nilai-nilai kelompok dalam pengambilan keputusan dan penjabaran nilai-nilai
Aktif mencari peluang guna memenuhi misi kelompok
3. Inisiatif, yaitu kesiapan untuk memanfaatkan kesempatan. Orang dengan kecakapan ini:
Siap memanfaatkan peluang
Mengejar sasaran lebih daripada yang dipersyaratkan atau diharapkan dari mereka
Berani melanggar batas-batas dan aturan-aturan yang tidak prinsip bila perlu agar tugas dapat dilaksanakan
11
4. Optimisme, yaitu kegigihan dalam memperjuangkan sasaran meskipun ada halangan dan kegagalan. Orang dengan kecakapan ini:
Tekun dalam mengejar sasaran kendati banyak halangan dan kegagala.
Bekerja dengan harapan untuk sukses, bukannya malah takut gagal.Memandang kegagalan atau kemunduran sebagai sesuatu yang dapat dikendalikan.
Bab III
TUJUAN DAN MANFAAT
Penelitian bertujuan dan mengandung manfaat sebagai tersebut di bawah ini: 1. Menghasilkan unit robot lengan lentur dua-link yang dapat digunakan sebagai
media pendidikan.
2. Menghasilkan modul pelatihan sesuai analisis skill yang diperlukan untuk menguasai kompetensi mendesain dan mengoperasikan Unit robot lengan lentur dua-link.
3. Menghasilkan instrumen evaluasi sesuai analisis skill atau kompetensi yang harus dimiliki peserta pelatihan
4. Menghasilkan model pembelajaran unit robot lengan lentur dua-link yang efektif 5. Dapat dilaksanakan pelatihan pemanfaatan unit robot lengan lentur dua-link bagi guru
SMK Kelompok Teknologi Industri negeri dan swasta di Kota Yogyakarta.
6. SMK yang potensial dan dipilih sebagai pilot proyek mampu mengimplementasikan unit robot lengan lentur dua-link sebagai media pendidikannya.
12 Bab IV
METODE PENELITIAN
A. Rencana/Disain Pelaksanaan Penelitian
Penelitian ini akan dilaksanakan mulai dari tahun pertama hingga tahun ketiga dengan metode dan kegiatan penelitian sebagaimana dijelaskan melalui Gambar 1 berikut ini:
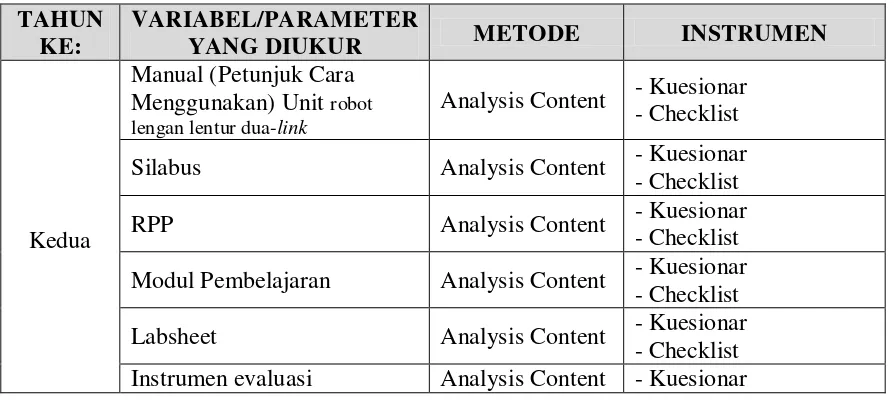
Desain mekanik robot lengan lentur dua-link telah dilakukan dan hasilnya dapat dilihat dilampiran. Adapun metode dan instrument penelitian sebagaimana terangkum dalam Tabel 2 berikut ini:
Tabel 1: Metode dan instrument penelitian TAHUN
KE:
VARIABEL/PARAMETER
YANG DIUKUR METODE INSTRUMEN
Kedua
Manual (Petunjuk Cara Menggunakan) Unit robot lengan lentur dua-link
Analysis Content - Kuesionar - Checklist
Silabus Analysis Content - Kuesionar
- Checklist
RPP Analysis Content - Kuesionar
- Checklist Modul Pembelajaran Analysis Content - Kuesionar
- Checklist
Labsheet Analysis Content - Kuesionar
- Checklist Instrumen evaluasi Analysis Content - Kuesionar
Tahun I:
Rancang Bangun Unit robot lengan lentur dua-link
Tahun 2:
Implementasi Unit robot lengan lentur dua-link dalam
PBM
PRODUK: 1. “Unit Lengan Robot
Fleksibel sbg Media Pendidikan
13
- Checklist Efektivitas
-Angket -Eksperimen - Wawanvara -Observasi
- Angket
- PedomanWawancara - Lembar observasi Motivasi peserta
-Angket - Wawanvara -Observasi
- Angket
- PedomanWawancara - Lembar observasi
Penjelasan bagan alir di atas adalah sebagai berikut:
Tahun II : Jenis Penelitian Quasy Experiment a. Persiapan dan studi pendahuluan
b. Penyusunan manual, silabus, RPP, modul, labsheet, dan lembar evalauai PBM c. Validasi manual, silabus, RPP, modul, labsheet dan lembar (instrumen) evaluasi
dilakukan melalui analisis konten dan expert judgment
d. Pengembangan model proses belajar mengajar dan sertifikasi kompetensi robot lengan lentur dua-link.
e. Validasi Model, Penelitian Quasy Experiment digunakan dalam penelitian ini, karena dalam situasi tidak dapat sepenuhnya melakukan kontrol eksperimen, misalnya jadwal kondisi eksperimen, randomisasi.
f. Pengujian Model, Pengujian terbatas dilakukan pada PBM Matakuliah Robotika di Jurusan Pendidikan Teknik Elektro/Mekatronika FT UNY dengan tiga kali pengujian. Metode eksperimen model single one shot case study.
Jadwal Pelaksanaan Tahun 2:
No Uraian Kegiatan Penanggung-jawab
Bulan Ke: ... (sejak disetujui)
1 2 3 4 5 6 7 8 9 10
1.
Persiapan dan koordinasi kegiatan penelitian
Ketua (M Khairudin) 2. Seminar instrumen M Khairudin 3.
Penyempurnaan
14 4.
Penelitian: a. Pembuatan
manual (User Manual)
Anggota 1: Zamtinah
b. Penyusunan silabus
Moh. Khairudin c. Penyusunan RPP Moh.
Khairudin d. Pembuatan Modul
Pembelajaran
Anggota 2: TH. Maryadi e. Pembuatan
Labsheet
Moh. Khairudin f. Pembuatan
instrumn evaluasi
Moh Khairudin g. Sinkronisasi &
revisi hasil kegiatan a-d
Tim Peneliti
5. Implementasi unit alat & eksperimen di kelas
Tim Peneliti
6. Laporan Kemajuan M Khairudin 7. Seminar hasil M Khairudin 8. Revisi dan
pembuatan laporan
15 BAB V
HASIL DAN PEMBAHASAN
A. Hasil
Luaran yang diharapkan pada tahun ini (kedua, 2014) adalah:
1. Terbangunnya unit robot lengan lentur dua-link yang akan digunakan sebagai media pembelajaran baik di tingkat Jurusan Pendidikan Teknik Elektro, UNY maupun akan dikembangkan. Luaran ini sudah tercapai pada tahun pertama (2013) teralisir 100 %.
2. Luaran penelitian ini adalah terbentuk manual bahan ajar robotika sudah tercapai sekitar 100 % seperti terlampir.
Manual bahan ajar ini terdiri dari cara penggunaan robot lengan lentur dua-link. Manual ini sangat membantu bagi para pemula untuk menggunakan dan mengoperasikan RLLDL. Manual ini telah diuji kelayakan kepada expert. Secara tampilan dan kemudahan penggunaan telah layak digunakan sebagai manual.
3. Luaran penelitian ini adalah terbentuk silabus bahan ajar robotika sudah tercapai sekitar 100 % seperti terlampir.
Silabus untuk RLLDL telah terbuat, silabus disesuaikan dengan kepentingan kuliah robotika di JPTE. Silabus juga telah diuji kelayakan oleh expert bidang robotika. Hasil uji kelayakan adalah bahwa semua komponen silabus telah terpenuhi.
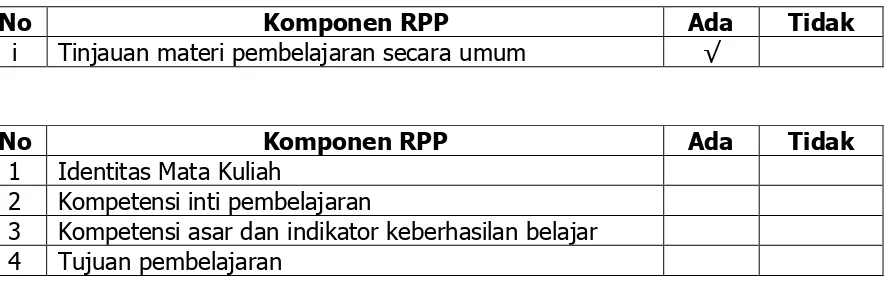
4. Luaran penelitian ini adalah terbentuk RPP bahan ajar robotika sudah tercapai sekitar 100 % seperti terlampir.
RPP untuk RLLDL telah terbuat, RPP disesuaikan dengan kepentingan kuliah robotika di JPTE. RPP juga telah diuji kelayakan oleh expert bidang robotika. Hasil uji kelayakan adalah bahwa semua komponen RPP telah terpenuhi.
Tabel 1. Form Validasi silabus dan RPP
No Komponen RPP Ada Tidak
i Tinjauan materi pembelajaran secara umum √
No Komponen RPP Ada Tidak
1 Identitas Mata Kuliah
2 Kompetensi inti pembelajaran
16
5 Materi pembelajaran 6 Metode Pembelajaran
7 Media Pembelajaran, Alat dan sumber belajar 8 Langkah-langkah pembelajaran
9 Rambu-rambu penilaian hasil belajar 10 Format penilaian hasil belajar
Pada instrumen ini semua validator menyatakan komponen RPP telah
tersedia dengan baik. Sehingga dapat digunakan untuk proses pembelajaran.
5. Luaran penelitian ini adalah terbentuk Modul bahan ajar robotika sudah tercapai sekitar 100 % seperti terlampir.
Isi silabus, RPP, modul meliputi kompetensi sebagai berikut a) Menjelaskan konsep dasar RLDL.
b) Mengoprasikan modul RLDL dengan sistem kendali. c) Menyebutkan perangkat-perangkat pendukung RLDL d) menggambar rangkaian RLDL
e) Mengoprasikan RLDL secara manual maupun otomatis.
Berikut merupakan instrument yang digunakan dalam validasi modul
No Materi Modul Pembelajaran Skor
1 2 3 4
1 Kebenaran tujuan pembelajaran
2 Kebenaran materi pembelajaran yang disajikan 3 Kebenaran materi pembelajaran perangkat keras 4 Kebenaran materi pembelajaran perangkat lunak 5 Kebenaran materi pembelajaran pengujian sistem 6 Keseuaian materi contoh hasil pengujian
7 Ketepatan materi contoh „analisis dan
pembahasan‟
8 Ketepatan kesimpulan hasil belajar 9 Ketepatan pertanyaan dan tugas
10 Kelengkapan lampiran perangkat keras sistem 11 Kelengkapan lampiran perangkat lunak/program
sistem
Pada instrumen ini semua validator menyatakan materi modul pembelajaran
rata-rata pada skor 3,5 berarti materi modul telah tersajikan dengan baik.
Sehingga dapat digunakan untuk proses pembelajaran.
17
a) Topik : Pengenalan Unit Robot Lengan Lentur Dua Link b) Topik : Bagian–Bagian utama unit RLDL
c) Topik : Power Suply RLDL d) Topik : Lengan Lentur e) Topik : Aktuator RLDL
f) Topik : Sensor Encoder pada RLDL g) Topik : Teknik antarmuka RLDL h) Topik : Sistem Kendali RLDL
Jika di dalam Lab Sheet ada kompetensi dasar dan indikator keberhasilan
belajar, maka contreng kolom “Ada”
No Komponen Lab Sheet Ada Tidak
i Ketersediaan langkah-langkah praktikum √
No Komponen Lab Sheet Ada Tidak
1 Identitas mata kulian
2 Pendahuluan berisi materi singkat 3 Ketersediaan alat praktikum 4 Ketersediaan bahan praktikum 5 Ketersediaan keselamatan kerja
6 Ketersediaan langkah-langkah praktikum 7 Ketersediaan gambar rangkaian
8 Ketersediaan tugas praktikum 9 Kesimpulan hasil praktikum 10 Evaluasi penilaian hasil belajar
Pada instrumen ini semua validator menyatakan komponen Lab Sheet telah tersedia dengan baik. Sehingga dapat digunakan untuk proses pembelajaran.
7. Luaran penelitian ini juga pada tahun pertama dapat dipublikasikan di Jurnal Internasional. Tim peneliti telah mengirimkan artikel Jurnal Internasional ke
International Journal of Advances in Robotic Research dan telah terbit pada Vol. 1, No. 1 (2014) yang terindex oleh www.scopus.com , Ei Compendex (CPX) www.ei.org/. Draft artikel yang
18
8. Luaran penelitian ini juga adalah publikasi dalam bentuk seminar internasional. Tim peneliti telah mengirimkan artikel ke International Conference on Research, Implementation And Education of Mathematics and Science, dengan judul artikel : “LINEAR MATRIX INEQUALITY BASED PROPORTIONAL INTEGRAL DERIVATIVE CONTROL FOR HIGH ORDER PLANT”.
19 BAB VI
KESIMPULAN DAN SARAN A. Kesimpulan
Penelitian tahun kedua ini merupakan penelitian lanjutan dari tahun pertama. Tahun pertama telah terbentuk robot lengan lentur dua link (RLLDL). Pada tahun kedua pembuatan perangkat pembelajaran yang meliputi manual, silabus, RPP, modul, labsheet dan intrument evaluasi. Pengujian validasi terhadap expert pada manual, silabus, RPP, modul, labsheet dan intrument evaluasi telah menunjukan bahwa perangkat pembelajaran siap untuk digunakan pada PBM. Pada validasi ahli konten disimpulkan bahwa konten materi baik sesuai dengan kebutuhan dunia kerja pada bidang robotika. Sedangkan validasi pada ahli media menyatakan bahwa secara tampilan dan keterbacaan serta kemudahan dalam penggunaan termasuk dalam kategori baik.
B. Saran
20
DAFTAR PUSTAKA
Alam, M. S. and Tokhi, M. O. (2007). Design of Command Shaper Using Gain-Delay Units and Particle Swarm Optimisation Algorithm for Vibration Control of Flexible Systems. International Journal of Acoustics and Vibration. 12(3): 99–108.
Khairudin, M., Mohamed, Z., Husain, A. R. and Ahmad, A. (2010). Dynamic Modelling and Characterisation of a Two-Link Flexible Robot Manipulator. Journal of Low Frequency Noise, Vibration and Active Control. 29(3): 207-219.
Mohamed, Z., Martin, J. M., Tokhi, M. O., Sa da Costa, J. and Botto, M. A. (2005). Vibration Control of a Very Flexible Manipulator System. Control Engineering Practice. 13(3): 267-277.
Dwivedy, S. K. and Eberhard, P. (2006). Dynamic Analysis of Flexible Manipulators, a Literature Review. Journal on Mechanism and Machine Theory. 41(7): 749–777.
Gafur, Abdul. 2001. Pola Induk Pengembangan Silabus Berbasis Kemampuan Dasar.
Thesis PPs UNY.
Olalla, C., Leyva, R., El Aroudi, A., Garces, P. and Queinnec, I. (2010). LMI Robust Control Design for Boost PWM Converter. IET Power Electronics. 3(1): 75-85.
Parjono dan Suyanto, Wardan. 2003. Kurikulum Berbasisi Kompetensi (konsep dan Implementasi). Yogyakarta. Fakultas Teknik Universitas Negeri Yogyakarta.
Subudhi, B. and Morris, A. S. (2002). Dynamic Modelling, Simulation and Control of a Manipulator with Flexible Links and Joints. Robotics and Autonomous Systems. 41: 257-270.
Tian, Q., Zhang, Y. Q., Chen, L. P. and Yang, J. (2009). Two-Link Flexible Manipulator Modelling and Tip Trajectory Tracking Based on The Absolute Nodal Coordinate Method. International Journal of Robotics and Automation. 24: 103-114.
Wang, X. and Mills, J. K. (2005). FEM Dynamic Model for Active Vibration Control of Flexible Linkages and Its Application to a Planar Parallel Manipulator. Journal Applied Acoustics. 66: 1151–1161.
Zamtinah, Djoko Laras, B. T., Herlambang S. P., Didik, H. (2008). Pengembangan Unit AMF Sebagai Sarana Up-Dating Kompetensi Guru-Guru SMK Jurusan Listrik.
21 Lampiran 1:
LOG BOOK
Ketua: Moh Khairudin, MT.,PhD.
Pengembangan Unit Robot Lengan Lentur Dua-Link Sebagai Sarana Pengembangan Kompetensi Bidang Otomasi dan Robotika Guru-Guru SMK Jurusan Listrik dan
Elektronika
NO Tanggal Kegiatan / Aktifitas Catatan Kerja / Hasil
Aktifitas 1
Senin, 17 Maret 2014
Kontrak penelitian Penandatanganan 70%
pendanaan 2
Senin, 24 Maret 2014
Fotocopi bahan dan rujukan
3 Mei 2014 Seminar instrument penelitian Ada saran penelitian dapat dipublikasikan 4 14 Mei
2014
Pembelian ATK (5 rim kertas HVS A4 80 gr, 1 Catridge Canon 1880, 10 Ball Point, 2 Buku Log Book, 40 CD Blank 700MB 5 Senin, 19
Mei 2014
- Diskusi tim
Inventarisasi pekerjaan dan persamaan ide penelitian
Inventarisir pekerjaan 6 Selasa, 20
Mei 2014
- Hasil diskusi inventarisasi pekerjaan penyusunan modul meliputi
a. Menjelaskan konsep dasar RLDL.
b. Mengoprasikan modul RLDL dengan sistem kendali.
c. Menyebutkan perangkat-perangkat pendukung RLDL
d. menggambar rangkaian RLDL
e. Mengoprasikan RLDL secara manual maupun otomatis.
7 Rabu, 21 Mei 2014
Penyusunan Modul Tentang Menjelaskan konsep dasar RLDL.
Hasil gambar (lihat lampiran)
8 Kamis, 22 Mei 2014
Penyusunan Modul Tentang Menjelaskan konsep dasar RLDL.
Hasil gambar (lihat lampiran)
9 Jumat, 23 Mei 2014
Penyusunan Modul Tentang Menjelaskan konsep dasar RLDL.
Hasil gambar (lihat lampiran)
10 Senin, 26 Mei 2014
Penyusunan Modul Tentang Menjelaskan konsep dasar RLDL.
Hasil gambar (lihat lampiran)
11 Selasa, 27 Mei 2014
Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem kendali.
Hasil gambar (lihat lampiran)
12 Rabu, 28 Mei 2014
Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem kendali.
Hasil gambar (lihat lampiran)
13 Kamis, 29 Mei 2014
Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem
22 kendali.
14 Jumat, 30 Mei 2014
Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem kendali.
Hasil gambar (lihat lampiran)
15 Senin, 2 Juni 2014
Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem kendali.
Hasil gambar (lihat lampiran)
16 Selasa, 3
Juni 2014 Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem kendali.
17 Rabu, 4 Juni 2014
Penyusunan Modul Tentang
Mengoprasikan modul RLDL dengan sistem kendali.
Hasil gambar (lihat lampiran)
18 Kamis, 5 Juni 2014
Penyusunan Modul Tentang Menyebutkan perangkat-perangkat pendukung RLDL
Hasil gambar (lihat lampiran)
19 Jumat, 6 Juni 2014
Penyusunan Modul Tentang Menyebutkan perangkat-perangkat pendukung RLDL
Hasil gambar (lihat lampiran)
20 Senin, 9 Juni 2014
Penyusunan Modul Tentang Menyebutkan perangkat-perangkat pendukung RLDL
Hasil gambar (lihat lampiran)
21 Selasa, 10 Juni 2014
Penyusunan Modul Tentang Menyebutkan perangkat-perangkat pendukung RLDL
Hasil gambar (lihat lampiran)
22 Rabu, 11 Juni 2014
Penyusunan Modul Tentang Menyebutkan perangkat-perangkat pendukung RLDL
23 Kamis, 12 Juni 2014
Penyusunan Modul Tentang Menyebutkan perangkat-perangkat pendukung RLDL
24 Jumat, 13 Juni 2014
Penyusunan Modul Tentang
menggambar rangkaian RLDL motor
25 Senin, 16 Juni 2014
Penyusunan Modul Tentang
menggambar rangkaian RLDL Software matlab 26 Selasa, 17
Juni 2014
Penyusunan Modul Tentang menggambar rangkaian RLDL Rabu, 18
Juni 2014
Penyusunan Modul Tentang
menggambar rangkaian RLDL mikrokontroller 27 Kamis, 19
Juni 2014
Penyusunan Modul Tentang menggambar rangkaian RLDL 28 Jumat, 20
Juni 2014
Penyusunan Modul Tentang menggambar rangkaian RLDL 29 Jumat, 20
Juni 2014
Penyusunan Modul Tentang
Mengoprasikan RLDL secara manual maupun otomatis.
23
Juni 2014 Mengoprasikan RLDL secara manual maupun otomatis.
31 Selasa, 24 Juni 2014
Penyusunan Modul Tentang
Mengoprasikan RLDL secara manual maupun otomatis.
32 Rabu, 25 Juni 2014
Penyusunan Modul Tentang
Mengoprasikan RLDL secara manual maupun otomatis.
33 Kamis, 26 Juni 2014
Penyusunan Modul Tentang
Mengoprasikan RLDL secara manual maupun otomatis.
34 Jumat, 27 Juni 2014
Penyusunan Modul Tentang
Mengoprasikan RLDL secara manual maupun otomatis.
35 Sabtu, 28 Juni 2014
Pembuatan laporan kemajuan 70 % penelitian - Pemindahan log book manual / hardcopy
ke bentuk softcopy
36 Sabtu, 28 Juni 2014
Pembuatan laporan kemajuan 70 % penelitian - Pemindahan log book manual / hardcopy
ke bentuk softcopy
37 Ahad, 29 Juni 20142013
Pembuatan laporan kemajuan 70 % penelitian - Laporan kemajuan penelitian
38 Ahad, 29 Juni 2014
Pembuatan laporan kemajuan 70 % penelitian - Laporan kemajuan penelitian
39 Senin, 30 Juni 2014
Pengumpulan laporan kemajuan 70 % penelitian yang terdiri dari
- Log book
24
Instrumen Penelitian Komponen Hand Out Untuk Ahli Pembelajaran Robot Lengan Lentur
Isilah kolom Ada/ Tidak sesuai dengan pernyataan pada Komponen Hand Out dengan cara mencontreng di kolom yang bersangkutan.
Contoh:
Jika di dalam Hand Out ada kompetensi dasar dan indikator keberhasilan belajar,
maka contreng kolom “Ada”
No Komponen Hand Out Ada Tidak
i Tinjauan materi pembelajaran secara umum √
No Komponen Hand Out Ada Tidak
1 Identitas Mata Kuliah
2 Ketersediaan materi singkat 3 Penyajian materi secara ringkas
4 Penyajian materi dibantu gambar/grafik
5 Penyajian materi dibantu formula/ rumus matematik 6 Ketersediaan tugas
7 Penyajian tugas dengan rinci
8 Penyajian tugas dibantu dengan rambu-rambu yang dilakukan
Saran-saran:
………
………
………
………
………
Yogyakarta, ………..
Validator,
25
Instrumen Penelitian Komponen RPP Untuk Ahli Pembelajaran Robot Lengan Lentur
Isilah kolom Ada/ Tidak sesuai dengan pernyataan pada Komponen RPP dengan cara mencontreng di kolom yang bersangkutan.
Contoh:
Jika di dalam RPP ada kompetensi dasar dan indikator keberhasilan belajar, maka
contreng kolom “Ada”
No Komponen RPP Ada Tidak
i Tinjauan materi pembelajaran secara umum √
No Komponen RPP Ada Tidak
1 Identitas Mata Kuliah
2 Kompetensi inti pembelajaran
3 Kompetensi asar dan indikator keberhasilan belajar 4 Tujuan pembelajaran
5 Materi pembelajaran 6 Metode Pembelajaran
7 Media Pembelajaran, Alat dan sumber belajar 8 Langkah-langkah pembelajaran
9 Rambu-rambu penilaian hasil belajar 10 Format penilaian hasil belajar
Saran-saran:
………
………
………
………
………
………
Yogyakarta, ………..
Validator,
26
Instrumen Penilaian Materi Modul Untuk AHLI MATERI Robot Lengan Lentur
Isilah kolom skor (1/2/3/4) sesuai dengan pernyataan pada Materi Modul Pembelajaran dengan cara mencontreng di kolom yang bersesuaian.
Keterangan: Skor 1 : Kurang Skor 2 : Cukup Skor 3 : Baik
Skor 4 : Sangat Baik Contoh:
Jika “Kebenaran materi pembelajaran yang disajikan di dalam modul” sudah “baik”, maka contreng kolom “3”
No Materi Modul Pembelajaran Skor
1 2 3 4
i Kebenaran materi pembelajaran yang disajikan √
No Materi Modul Pembelajaran Skor
1 2 3 4
1 Kebenaran tujuan pembelajaran
2 Kebenaran materi pembelajaran yang disajikan 3 Kebenaran materi pembelajaran perangkat keras 4 Kebenaran materi pembelajaran perangkat lunak 5 Kebenaran materi pembelajaran pengujian sistem 6 Keseuaian materi contoh hasil pengujian
7 Ketepatan materi contoh „analisis dan
pembahasan‟
8 Ketepatan kesimpulan hasil belajar 9 Ketepatan pertanyaan dan tugas
10 Kelengkapan lampiran perangkat keras sistem 11 Kelengkapan lampiran perangkat lunak/program
sistem
Saran-saran:
... ...
... ...
... ...
Yogyakarta, ... Validator,
27
Instrumen Penilaian Komponen Lab Sheet Untuk Ahli Pembelajaran Robot Lengan Lentur
Isilah kolom Ada/Tidak seusai dengan pernyataan pada komponen Lab Sheet dengan cara mencontreng di kolom yang bersesuaian.
Contoh:
Jika di dalam Lab Sheet ada kompetensi dasar dan indikator keberhasilan belajar,
maka contreng kolom “Ada”
No Komponen Lab Sheet Ada Tidak
i Ketersediaan langkah-langkah praktikum √
No Komponen Lab Sheet Ada Tidak
1 Identitas mata kulian
2 Pendahuluan berisi materi singkat 3 Ketersediaan alat praktikum 4 Ketersediaan bahan praktikum 5 Ketersediaan keselamatan kerja
6 Ketersediaan langkah-langkah praktikum 7 Ketersediaan gambar rangkaian
8 Ketersediaan tugas praktikum 9 Kesimpulan hasil praktikum 10 Evaluasi penilaian hasil belajar
Saran-saran
... ...
... ...
... ...
... ...
... ...
... ...
... ...
Yogyakarta, ... Validator,
28
Biodata Peneliti
Biodata Ketua Peneliti A. Identitas Diri
1 Nama Lengkap (dengan gelar) Moh. Khairudin, MT., PhD. 2 Jabatan Fungsional Lektor Kepala
3 Jabatan Struktural -
4 NIP 19791204 200212 1 002
5 NIDN 12047901
6 Tempat & Tgl Lahir Tegal, 12 April 1979
7 Alamat Rumah Kompleks Masjid Al Amin, RT 08 RW 60 Joho Condongcatur Depok,Sleman, Yogyakarta 8 Nomor Telp/Faks/HP +6285878754037
9 Alamat Kantor Jurusan Pend. Teknik Elektro, FT, UNY Kampus Karangmalang, Yogyakarta 10 Nomor Telp/Faks 0274-548161/ 0274-540715
11 Alamat e-mail [email protected]
12 Lulusan yang Telah dihasilkan S-1=-- orang, S2=-- orang, S3=--orang 13 Mata Kuliah yg Diampu 1. Sistem Mikroprosesor
2. Perencanaan Sistem Kendali Industri 3. Sistem Kendali Adaptif
4. Elektronika Industri 5. Pemrograman Komputer 6. Teknik Digital
7. Sistem Kendali
8. Praktik Elektronika Dasar
9. Praktik Sistem Kendali Terprogram B. Riwayat Pendidikan
S-1 S-2 S-3
Nama Perguruan Tinggi
Universitas Negeri Yogyakarta
Institut Teknologi Sepuluh Nopember
University of Technology
Malaysia Bidang Ilmu Pendidikan Teknik
Elektro
Teknik Elektro-Kendali
Teknik Elektro-Kendali Robotika
Tahun Masuk-Lulus 1998-2002 2004-2006 2008-2011
Judul
Skripsi/Thesis/Disertasi
Kelayakan Penyelenggaraan Program Studi Teknik Informatika
di SMK N2
Wonosari
Pengaturan
Kecepatan Spindle
Pada Mesin Bubut Dengan Penggerak
Motor DC
Menggunakan Sistem Pengaturan Robust Metode QFT.
LMI Based Robust Control of a
Two-Link Flexible
29
C. Pengalaman Penelitian Dalam 5 Tahun Terakhir
No Tahun Judul Penelitian
Pendanaan
Sumber Jumlah
(Juta Rp) 1 2008 Development and Input Shaping
Control of a Two-Link Flexible Manipulator
Kementrian Riset Malaysia
600
2 2006 Perancangan Kontroller Fuzzy AutoTunning Pada Sistem Kendali Conveyor
RG TPSDP UNY
30
D. Pengalaman Pengabdian Kepada Masyarakat Dalam 5 Tahun Terakhir
No Tahun Judul Pengabdian
*Tidak ada PPM lima tahun terakhir karena peneliti tugas belajar
E. Pengalaman Penulisan Artikel Ilmiah Dalam Jurnal Dalam 5 Tahun Terakhir
No Judul Artikel Ilmiah Volume/
Nomer/Tahun Nama Jurnal 1 NN robust based-PID Control of A
Two-Link Flexible Robot Manipulator
2011 Int. Journal on
Advanced Science, Engineering & Inf. Tech
2 Dynamic Modelling and
Characterisation of a Two-link Flexible Robot Manipulator
Volume 29, No.3, 2010, pp:207-219.
Journal of Low Frequency Noise, Vibration and Active Control 3 Dynamic Charaterization of a
Two-Link Flexible Manipulator: Theory and Experimental
Submitted, October 2010
Journal of
Mechanical System
and Signal
Processing, 2010. 4 Automated Navigation System based
on Weapon-Target Assignment
Volume 9 Nomor 1, April 2011
Telkomnika Journal University of Achmad Dahlan, Yogyakarta
5 On The Design of a NN based PID Controller for a Two-link Flexible Manipulator Incorporating Payload
Volume 7 Nomor 2, 2011
Journal of
Computer Science, Univ of Pelita Harapan
6 RBFNN Control Of a Two-Link Flexible Link Manipulator Incorporating Payload
Volume 8 Nomor 2, August 2010
Telkomnika Journal University of Achmad Dahlan, Yogyakarta
30
Link Manipulator Using AMM December 2008 University of Achmad Dahlan, Yogyakarta
8 Robust Control Design to Noise and Disturbance Using QFT
February 2007 Diagonal Journal, Engineering
Faculty, Universitas Merdeka Malang
F. Pengalaman Penyampaian Makalah Secara Oral Pada Pertemuan / Seminar Ilmiah Dalam 5 Tahun Terakhir
No Nama Pertemuan Ilmiah/Seminar Judul Artikel
Ilmiah Waktu & Tempat 1 Int. Conference on Advanced
Science, Engineering & Inf. Tech.
NN robust Control of A Two-Link Flexible Robot Manipulator
Kuala Lumpur, 12-13 Dec, 2011
2 Quality Insurance on Research International Conference, Indonesia University
Modelling and
Vibration
Suppression of A Two-Link Flexible Manipulator
3-6 August 2009, Jakarta
3 Quality Insurance on Research International Conference, Indonesia University
Dynamic Modelling And Analysis of A Two-Link Flexible Robot Manipulator Incorporating Payload
3-6 August 2009, Jakarta
4 International Engineering Convention
Dynamic Modelling
of A Two-Link
Flexible Manipulator
11-13 May 2009, Damascus, Syiria
5 Control Instrumentation and Mechatronics Int. Conference
Modelling of a
Two-link Flexible
Manipulator
Melacca, Malaysia, 2-3 June 2009
6 Scientific Conference Modelling and
Control of a
Two-link Flexible
Manipulator
SC UKM Malaysia, 17 Jan 2009
7 IEEE SCOReD 2008 A Technique for
Dynamic Modelling
of a Two-link
Flexible Manipulator,
UTM Malaysia 26-27 Nov 2008
8 Scientific Conference Finite Element
Method for
Modeling A
Two-link Flexible
Manipulator
31
G. Pengalaman Penulisan Buku dalam 5 Tahun Terakhir
No Judul Buku Tahun Jumlah
Halaman Penerbit
1 - - - -
2 - - - -
H. Pengalaman Perolehan HKI Dalam 5 – 10 Tahun Terakhir
No Judul / Teman HKI Tahun Jenis No P/ID
1 - - - -
2 - - - -
I. Pengalaman Merumuskan Kebijakan Publik/Rekayasa Sosial Lainnya Dalam 5 Tahun Terakhir
No
Judul/Teman/Jenis Rekayasa Sosial Lainya uang Telah
Diterapkan
Tahun Tempat Penerimaan
Respon Masyarakat
1 - - -
2 - - -
J. Penghargaan yang Pernah Diraih dalam 10 tahun Terakhir (dari pemerintah, asosiasi atau institusi lainnya)
No Jenis Pengahargaan Institusi Pemberi
Penghargaan Tahun
1 - - -
2 - - -
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata dijumpai ketidak-sesuaian dengan kenyataan, saya sanggup menerima risikonya. Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu persyaratan dalam pengajuan Hibah Penelitian Hibah Bersaing (Sebutkan Nama Skim Penelitian)
Yogyakarta, 19 Maret 2012 Pengusul
32 Biodata Peneliti
1. Nama : Zamtinah, MPd.
2. Tempat,Tgl Lahir :Yogyakarta, 17 Februari 1962
3. Alamat Asal : Semaki Kulon UH I/361 A Yogyakarta
4. Alamat sekarang : Ganjuran RT 03 RW 03 Manukan, Condongcatur, Depok. Sleman, DI. Yogyakarta
5. No. Telpon Rumah : 0274 - 884933 6. No. HP : 081328797306
7. NIP : 131862235
8. Pangkat/Gol : Penata/ IIId 9. Jabatan : Lektor Kepala
10. Fak./Jur. : Teknik/Pendidikan Teknik Elektro 11. Perguruan Tinggi : Universitas Negeri Yogyakarta 12. Bidang Keahlian : Teknik Elektro
13. Riwayat Pendidikan No. Jenjang
Pendidikan
Jurusan/Program Studi Lulus Tahun
Lembaga/Institusi 1. S1 Pendidikan T. Elektro 1989 IKIP Yogyakarta 2. S2 Pend.Teknologi & Kejuruan 1999 Pasca Sarjana
UNY 14. Mata Kuliah yang Diampu (3 tahun terakhir):
No. Nama Mata Kuliah Semester
(Gasal/Genap)
Tahun 1 Teknik Penulisan Karya Ilmiah Genap: IV Sejak 2000
2. Pengajaran Mikro Genap: VI Sejak 2000
3. Praktik Mesin Listrik Genap: IV 2004
4. Praktik Instalasi Listrik Gasal: V Sejak 2004 5. Teori Instalasi Listrik Genap: IV Sejak 2005
6. Praktik Dasar Listrik Genap: II Sejak 2005
7. Pembimbing KKN/PPL Gasal: VII Sejak 2000
8. Pembimbing Tugas Akhir Skripsi Genap&Gasal Sejak 1995 9. Pembimbing Proyek Akhir Genap&Gasal Sejak 1995 10. Pembimbing Praktik Industri Grnap&Gasal Sejak 1993 15. Pengalaman Penelitian (5 tahun terakhir)
No. Judul Penelitian Sebagai Tahun Sumber Dana
1. Kompetensi Standar Lulusan SMK yang
Dibutuhkan Industri
Peneliti Tunggal
2000 Tesis S2
2. Motivasi Mahasiswa Baru Angkatan
2000 untuk Melanjutkan Studi di FT UNY
Ketua 2000 Dana FT UNY
3. Pembakuan Kompetensi Lulusan SMK
Jurusan Listrik
Anggota 2001 Dosen Muda
DIKTI
4. Hubungan Antara Konsep Diri dan
Kecerdasan Emosional terhadap Prestasi Belajar Matematika Teknik Mahasiswa Jurusan Elektro FT UNY
Peneliti Tunggal
2001 Dosen Muda
DIKTI
5. Peningkatan Kualitas Menggambar
33
Bermodul Tunggal
6. Meningkatkan kemampuan Menulis
Ilmiah Bagi Mahasiswa Teknik Elektro FT UNY
Peneliti Tunggal
2003 Dana FT UNY
7. Efektivititas Programmable Logic
Controller (PLC) dalam Perkuliahan Instalasi Tenaga
Anggota 2003 Hibah DUE-Like
Diknik Elektro FT UNY
8. Peningkatan Kualitas Pembelajaran
Perencanaan Instalasi Berbasis Program Komputer
Anggota 2004 Hibah DUE-Like
Diknik Elektro FT UNY
9. Pengaruh Praktik Industri dan Informasi
Dunia Kerja Terhadap Kesiapan Mental Kerja Mahasiswa T.Elektro FT UNY
Ketua 2004 Dosen Muda
DIKTI 10. Pengembangan Model Pembelakaran
Instalasi Listrik Berbasis Multi Media Anggota
2005 Hibah Kompetisi
A2 Diknik Elektro FT UNY 11. Pengembangan Unit Stand-by Power
System Daya Kecil
Anggota 2005 Hibah TPSDP
Teknik Elektro FT UNY 12. Meningkatkan prestasi belajar
elektronika dasar melalui pembelajaran Koopertaif
Ketua 2005 Dosen Muda
13. Meningkatkan prestasi dan kompetensi mahasiswa Teknik Elektro melalui pembelajaran Model EBCE
Ketua 2006 Hibah TPSDP
Teknik Elektro FT UNY 14. Monitoring dan Evaluasi PBM Berbasis
Multimedia sebagai upaya penjaminan mutu Jurusan Pendidikan teknik Elektro Ft UNY
Anggota 2006 Hibah Kompetisi
A2 Diknik Elektro FT UNY
15. Kontribusi Unit AMF Power System di dalam pencapaian kompetensi pada Kurikulum SMK 2004
Ketua 2006 Hibah Kompetisi
A2 Diknik Elektro FT UNY
16. Kegiatan Pengabdian Pada Masyarakat (5 tahun terakhir) No
.
Judul Kegiatan Pada Masyarakat
Tempat & Sumber Dana
Peranan Tahun 1. Penataran Karya Ilmiah SMK Muh Prambanan Penatar 2002 2. Penataran Karya Ilmiah SMK Muh III Yk Penatar 2003 3. Penataran Karya Tulis
Ilmiah Bagi Guru di DIY
Univ. Teknologi Yog-karta (UTY)
Penatar 2003 4. Promosi Kompetensi Siswa
Tingkat Nasional
Fakultas Teknik; Depdiknas
Yuri 2003
5. Promosi Kompetensi Siswa Tingkat Propinsi DIY
Fakultas Teknik UNY; Kanwil Depdiknas DIY
Pembuat soal, Yuri
Sejak 1999 6. Promosi Kompetensi Siswa
Tingkat Eks.Karesidenan Kedu
Fakultas Teknik UNY; Dinas Pendidikan 7. Promosi Kompetensi Siswa
Tingkat Eks. Karesidenan Surakarta
Fakultas Teknik UNY; Dinas Pendidikan Nasional Surakarta
Panitia 2005
8. Otomatisasi penyepuhan perak bagi pengrajin perak di Kotagede Yogyakarta
34 17. Penerbitan Karya Ilmiah (5 tahun terakhir):
No. Judul Artikel Nama Majalah/
Jurnal
Ketua/ Anggota
Tahun 1. Sosialisasi teknologi nuklir sbg
sumber energi listrik alternatif masa depan
Jurnal Penddkan Teknologi&Keju-ruan FT UNY
Ketua 2001
2. Indikator kompetensi yang dibutuhkan bidang teknik elektro
Makalah seminar DUE Like
Pemakalah 2002
3. Sistem Pengajaran Bermodul sebagai alternatif meningkat-kan efisiensi kuliah gambar Teknik
4. Pengaruh Informasi kerja dan Pengalaman PI thd kesiapan kerja siswa SMK
Jurnal
Kependidikan UNY
Ketua 2004
5. Faktor-faktor yang
mempengaruhi kesiapan kerja mahasiswa teknik elektro FT UNY
Edukasi @ Elektro FT UNY
Ketua 2005
6. Manfaat dan Mudharat SUTET SKH. BERNAS JOGJA (Koran)
Ketua 2005 7. Proyek “Taman Pintar” dan
Kualitas Pendidikan Kita
SKH. BERNAS
9. Assesment of The Historical Magnetic Dosages Received by Live Line Maintence Personal
Jurnal
“Edukasi@Elektro” Vol.2 No.1 2005
Anggota 2005
10. Implementasi Pendekatan ketrampilan proses pada mata kuliah TPKI
11. Efektivitas pembelajaran menggunakan Peta Konsep
Jurnal
“Edukasi@Elektro” Vol. 2 No.3 Januari 2006
Ketua 2006
18. Pelatihan yang pernah diikuti (3 tahun terakhir)
No. Judul Pelatihan Tempat/Instansi Penyelenggara
Sumber Dana Tahun 1. Penelitian tindakan kelas FT UNY Fakultas
Teknik UNY
2003 2. Pelatihan multi media FT UNY Fakultas
Teknik UNY
2003 3. Otomatisasi mesin listrik FESTO Jakarta DUE Like 2004
35
Tegangan Rendah Jakarta Kompetisi A2
5. Academic Writing FBS UNY Ford
Foundation
2005
Yogyakarta, 19 Maret 2012 Pembuat,
Zamtinah, MPd.
CURRICULUM VITAE A. Identitas
Nama : Drs. Totok Heru Tri Maryadi, M.Pd. Tempat, tanggal lahir : Magetan, 6 April 1968.
Jabatan Fungsional : Lektor
Pangkat / Gol / NIP : Penata tk I / IIId / 19680406 199303 1 001 Bidang Ilmu : Kendali dan Komputer
Jurusan / Fakultas : Pendidikan Teknik Elektro / Fakultas Teknik Alamat rumah : Jl. Nyi Ageng Nis No. 5 Pilahan Rejowinangun
Yogyakarta
Telp. 0274 4438592 (HP. 0813 2884 7211). E-mail : [email protected]
Alamat kantor : Teknik Elektro Fakultas Teknik Universitas Negeri Yogyakarta, Karangmalang Yogyakarta
telp. 0274-548161, 0274-586168 ext 293
B. Riwayat Pendidikan:
No Jenjang Bidang Tempat Pendidikan Tahun
Lulus 1. S1 Pendidikan Teknik Elektro IKIP Negeri Yogyakarta 1992 2. S2 Pendidikan Teknologi dan
Kejuruan
Universitas Negeri Yogyakarta
2001
C. Pelatihan / Workshop
No Topik Pelatihan Tempat Pelatihan Lama Tahun
1. Mekatronika PT. FESTO Jakarta 4 hr 2002
2. WEB Design PT. Computindo Jakarta 6 hr 2003
3. Robotika PT. FESTO Jakarta 10 hr 2004
4. Manajemen Mutu ISO 9001:2000
36
5. Robotika PEN Surabaya 1 bl 2005
6. Mikrokontroller ATMega8 PPPGT Bandung 4 hr 2006 7. Telecommunication and
Control System
PMP University of Canberra Australia
2 bl 2007 8. PPengadaan Barang dan Jasa
Pemerintah
Bapenas Jakarta 2 hr 2007
D. Mata Kuliah yang Diampu
No Mata Kuliah Semester Jenjang
1. Praktek Mekatronika Gasal dan Genap D3 & S1 2. Praktek Kendali Terprogram Gasal D3 & S1
3. Robotika Gasal dan Genap D3 & S1
4. Praktek PLC Gasal D3 & S1
5. Kendali Otomatis Gasal dan Genap D3 & S1 E. Pengalaman Kerja
1. Staf Pengajar Konsentrasi Kendali Industri pada Program Studi Elektro Universitas Negeri Yogyakarta, tahun 1992- sekarang, Mata Kuliah yang pernah diampu: Dasar Sistem Kendali, Komputer, Kendali Terprogram, Programmable Logic Controller, Mekatronika dan Robotika.
2. Ketua Unit Produksi Elektro FT UNY dari tahun 1999 –2007.
3. Koordinator Laboratorium Kendali Jurusan Pendidikan Teknik Elektro Tahun 2000-2004.
4. Koordinator Tugas Akhir Mahasiswa D3 Teknik Elektro tahun 2002-2004.
5. Asisten Direktur II Bidang Administrasi dan Keuangan Sub Project Management Unit (SPMU) Technological Professional Skills Development Sector Project (TPSDP) UNY tahun 2003 sampai 2007.
6. Koordinator Laboratorium Mekatronika Jurusan Pendidikan Teknik Elektro Tahun 2004-2007.
E. Pengalaman Penelitian
No. Judul Penelitian Sumber
Dana Tahun Posisi
1.
Percepatan penyelesaian mata kuliah karya teknologi mahasiswa program studi teknik elektro dengan topic given strategy
DUE LIKE
2002 Anggota
2. Identifikasi Gangguan Motor 3 Phasa berbasis mikrokontroller DIK 2003 Ketua 3. Rancang bangun Programmable Logic Controller berbasis Mikrokontroller LIKE DUE 2003 Ketua
4.
Pengembangan prototipe media pembelajaran audio visual berbasis multimedia pada mata kuliah pengajaran mikro
TPSDP 2004 Ketua
37 6.
Pengembangan Media Pembelajaran Multimedia interaktif terinovasi pada mata kuliah instalasi listrik
DPPM 2007 Ketua
7. Pengembangan alat ukur kuat pukulan dan tendangan atlit beladiri DIPA UNY 2010 Anggota
G. Pengalaman Pengabdian Pada Masyarakat
No. Judul Pengabdian Sumber
Dana Tahun 1. Pelatihan aplikasi program PSPICE untuk
menganalisis rangkaian listrik bagu guru sekolah menengah kejuruan di daerah istimewa Yogyakarta
DIK 2002
2. Pelatihan Bidang Kewirausahaan di Yayasan panti Asuhan Yatim Piatu Moyudan Sleman
DIK-S 2002 3. Pengembangan muatan lokal elektronika di SLTP
Negeri Pengasih tahap I
DIK 2002 4. Pelatihan Ms. Office bagi Guru-guru dan staf
administrasi SMK PIRI Yogyakarta
DIK 2003 5. Pengembangan muatan lokal elektronika di SLTP
Negeri Pengasih tahap II
DIK 2003 6. Pelatihan pemrograman Programmable Logic
Controller dengan statement list bagi guru-guru SMK di Daerah Istimewa Yogyakarta.
DIK 2004
7. Otomatisasi alat penyepuh (elektroplating) kerajinan perak di Kotagede Yogyakarta (vucer)
DIKTI 2004 8. Peningkatan Kompetensi bagi Guru-guru SMK
Negeri Jurusan Listrik di Daerah Istimewa Yogyakarta melalui Pelatihan Mekatronika
DIK 2007
9. Peningkatan Kompetensi bagi Guru-guru SMK Negeri di Daerah Istimewa Yogyakarta melalui Pelatihan Robotika
DIKTI 2007
10. Peningkatan Kompetensi Guru-Guru SMK di Daerah Istimewa Yogyakarta dalam bidang Pneumatik melalui Pelatihan FluidSim Pneumatik
DIK 2008
H. Publikasi
No. Judul Publikasi Jenis Publikasi Tahun
1. Rancang bangun Programmable Logic Controller berbasis Mikrokontroller
Prosiding Seminar Nasional
2004 2. Pengembangan prototipe media
pembelajaran audio visual berbasis multimedia pada mata kuliah pengajaran mikro
Prosiding Seminar Nasional
2005
3. Pengenalan pola ruang untuk penglihatan robot dengan metode edge detection
Edukasi Elektro 2007 4. Praktek Robotika dengan menggunakan
webcam sebagai penglihatan robot
Prosiding seminar Internasional
38 I. Membimbing Tugas Akhir Skripsi Mahasiswa
No. Judul Tugas Akhir Nama
Mahasiswa
Jenjang Tahun Lulus 1. Rancang bangun Programmable Logic
Controller berbasis Mikrokontroller
Ilmawan Mustaqim
S1 2004
2. Pengembangan prototipe media pembelajaran audio visual berbasis multimedia untuk membuka dan menutup pelajaran
Sutikno S1 2005
3. Pengenalan citra dengan menggunakan webcam
Amrullah D3 2007
4. Peningkatan prestasi siswa dengan menggunakan pembelajaran kooperatif
Supriyatna S1 2008 5. Rancang Bangun PLC dengan IC TIP Budi
Utomo
D3 2011
J. Kegiatan Akademik Lainnya
No. Judul Kegiatan Jabatan Tahun
Lulus 1. Lomba Kompetensi Siswa SMK tingkat
Nasional
Koordinator Bidang Instalasi Listrik
2004 2. Lomba Kompetensi Siswa SMK tingkat
Propinsi DIY
Juri Bidang Instalasi Listrik
2005 3. Lomba Kompetensi Siswa SMK se-eks
Karesidenan Kedu
Juri Bidang Instalasi Listrik
2005 4. Lomba Kompetensi Siswa SMK se-eks
Karesidenan Surakarta
Juri Bidang Instalasi Listrik
2005 5. Lomba Kompetensi Siswa SMK tingkat
Propinsi DIY
Juri Bidang Instalasi Listrik
2006 6. Lomba Kompetensi Siswa SMK tingkat
Propinsi DIY
Juri Bidang Mekatronika 2007 7. Lomba Kompetensi Siswa SMK tingkat
Propinsi DIY
Juri Bidang Mekatronika 2008 8. Lomba Kompetensi Siswa SMK tingkat
Propinsi DIY
Juri Bidang Mekatronika 2010
Dengan ini saya menyatakan bahwa informasi yang saya tulis ini menerangkan keadaan, kualifikasi dan pengalaman saya dengan sesungguhnya.
Yogyakarta, 17 Maret 2012 Yang menyatakan