PADA SISTEM PENGATURAN KECEPATAN MOTOR ARUS SEARAH
Bebas
88
0
0
Teks penuh
Gambar
+7
Dokumen terkait
dipergunakan struktur PID Diskrit sebagai kontroler pada Implementasi menggunakan nilai bobot yang diperoleh dari tuning Neural Network. Hasil dari learning sendiri
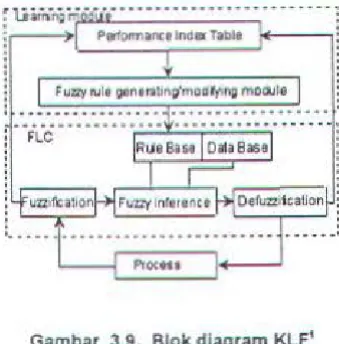
1) Dari simulasi perubahan kecepatan ( setpoint ) seperti yang ditunjukkan pada gambar 3.8. terlihat bahwa penggunaan kontroler logika fuzzy model Mamdani mampu memberikan kreteria
Respon sistem tanpa beban dengan setpoint 1000Rpm dengan menggunakan kontroler neural fuzzy 2 layer 20 neuron menghasilkan respon kecepatan tanpa overshoot dan
Hasil perbandingan respon kecepatan motor saat tanpa kontroler PID, saat menggunakan kontroler PID dengan nilai acak dan saat menggunakan kontroler PID berbasis
Untuk mendapatkan minyak goreng yang berkwalitas maka diterapkan pengaturan kecepatan putaran motor listrik tersebut menggunakan logika Fuzzy Tsukamoto, dengan
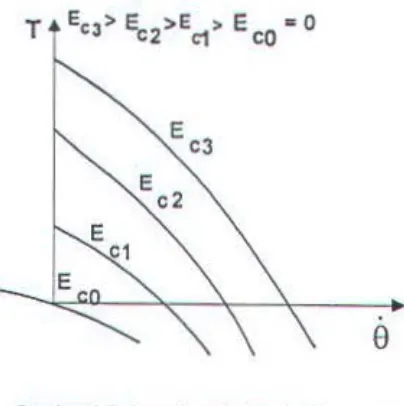
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari
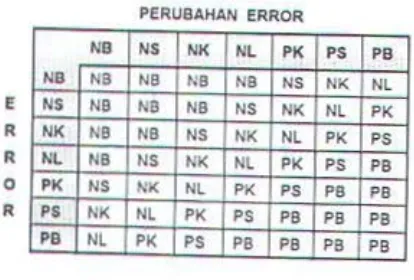
Logika samar pada pengaturan kecepatan motor DC digunakan untuk mengetahui hubungan antara variable masukan dan keluaran, dalam hal ini variable masukan adalah putaran,
Dari hasil simulasi terbukti menggunakan kontroler Fuzzy Logic berbasis Direct Torque Control respon kecepatan motor induksi tiga fasa menjadi lebih baik.. Kata kunci
