IV-56 SENTRA
Jurusan Teknik Elektro FTI-UII, Jl. Kaliurang Km. 14,5 Sleman, Yogyakarta, 55501
Telp:0274-895287, Fax: 0274-895287 Ext 147 E-mail: [email protected]
Abstrak
Pada dasarnya penelitian segway mini balancing robot dua roda merupakan prototype dari kendaran transportasi skuter segway yang dikembangan dari model pendulum terbalik. Robot menggunakan sensor accelerometer MMA7361 yang digunakan untuk mengukur sudut kemiringan terhadap sumbu vertikal pada robot. Algoritma kendali PID ditanamkan pada chip mikrokontroler ATmega16. Nilai kesalahan yang dihasilkan akan diproses oleh algoritma kendali PID untuk menghasilkan sinyal kendali PID yang baik. Nilai kendali PID akan dikonversi dengan PWM (Pulse Width Modulation) atau mengatur duty cycle PWM yang digunakan untuk mengatur pergerakan robot agar stabil dan tegak lurus pada bidang datar. Dari hasil pengujian dan analisis yang telah dilakukan dapat diketahui bahwa algoritma kendali PID dapat diterapkan pada sistem prototype segway mini balancing robot dua roda untuk mengatur pergerakan robot agar stabil dan tegak lurus pada bidang datar.
Kata Kunci: Prototype segway mini balancing robot dua roda, accelerometer MMA7361, Mikrokontroler ATmega16, Algoritma Kendali PID.
Pendahuluan
Saat ini teknologi berkembang semakin pesat, khususnya di bidang robotika dengan munculnya berbagai jenis robot dengan fungsi dan aplikasi masing-masing. Salah satunya adalah prototype segway mini balancing robot dua roda yang memiliki fungsi mengatur pergerakan robot agar stabil dan tegak lurus pada bidang datar. Penelitian segway mini balancing robot merupakan prototype dari kendaran transportasi skuter segway yang dikembangkan dari model pendulum terbalik. Balancing robot ini memiliki potensi untuk memecahkan beberapa tantangan perkembangan teknologi di industri maupun masyarakat.
Penelitian sebelumnya berjudul “Application of Kalman Filtering and PID Controller for
Direct Inverted Pendulum Controller” [1]. Pada penelitian ini merancang sebuah prototype
selfbalancing robot menggunakan algoritma kalman filtering dan kendali PID. Algoritma kalman filtering pada penelitian ini digunakan untuk mengurangi atau menghilangkan sebagian sinyal error dari gabungan output pada sensor accelerometer dan gyroskope. Algoritma kendali PID digunakan untuk mengatur pergerakan robot, maju, mundur, memutar dan stabil tegak lurus pada bidang datar dan untuk memutar arah robot.
Penelitian lain “Balancing a Two-Wheeled Autonomous Robot” [2]. Pada penelitian ini
dirancang sebuah autonomous balancing robot dua roda menggunakan algoritma kalman filtering dan Linear Quadratic Regulator (LQR). Pada penelitian ini lebih mengutamakan gabungan sensor inclinometer dan gyroskope yang di filter kan menggunakan kalman filtering untuk menghilangkan sebagian sinyal error dari gabungan output sensor dan digunakan untuk mengatur pergerakan robot dua roda yang berorientasi pada 2 sudut yaitu sudut X(Roll) dan Z(Yaw) agar robot dapat stabil dan tegak lurus pada bidang datar dan robot bisa maju dan mundur apabila ada gangguan pada masing-masing arah sudut atau saat robot miring kekanan dan kekiri.
SENTRA IV-57 mkrokontroler keluarga AVR dengan didukung perangkat antarmuka untuk kendali arah putaran dan kecepatan motor.
Metodologi Penelitian
Pada penelitian ini akan digunakan beberapa metode penelitian untuk mengendalikan posisi robot agar tegak lurus terhadap bidang datar. Metode penelitian yang digunakan yaitu:
1. Studi literatur
2. Perancangan perangkat keras 3. Perancangan perangkat lunak 4. Analisa data
Studi Literatur
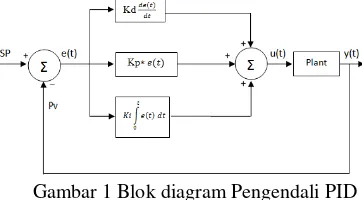
Pengendali PIDPengendali PID adalah suatu sistem pengendali yang merupakan gabungan proportional, integral dan derivative. Fungsi dari pengendali P, I dan D adalah Kendali proportional berfungsi untuk memperkuat sinyal kesalahan penggerak (sinyal error), sehingga akan mempercepat output sistem mencapai titik referensi. Kendali integral pada prinsipnya bertujuan untuk mengurangi error steady state yang biasanya dihasilkan oleh kendali proportional. Kendali derivative dapat disebut pengendali laju, karena output kendali sebanding dengan laju perubahan sinyal error. Blok diagram pengendali PID dapat dilihat pada gambar 1.
Gambar 1 Blok diagram Pengendali PID
Setiap kelebihan dan kekurangan dari masing-masing pengendali P, I dan D dapat saling ditutupi dengan menggabungkan menjadi pengendali PID. Elemen pengendali P, I dan D secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan osilasi dan error stedy state. Persamaan pengendali PID ditunjukkan pada persamaan 1.
(1)
Karakteristik penambahan pengendali P ( ), I ( ) dan D ( ) dapat diambil dari watak kendali itu masing-masing seperti yang dijelaskan pada tabel 1 dibawah ini:
Tabel 1 Karakteristik penambahan nilai Pengendali P, I dan D
Karakteristik P I D
Osilasi /Overshoot Meningkat Meningkat Menurun
Rise Time Menurun Menurun Perubahan kecil
Steady State Error Menurun Hilang Perubahan kecil
Settling Time Perubahan kecil Menigkat Menurun
Sensor Accelerometer MMA7361
IV-58 SENTRA
Perancangan Perangkat Keras
Perancangan Sistem
Secara umum konfigurasi sistem robot terdiri dari input, pengendali dan output, dari sisi masukan (input) adalah sensor Accelerometer MMA7361, pengendali adalah Mikrokontroler ATmega16 dan keluaran (output) berupa driver motor DC H-Bridge. Blok sistem dan perancangan dari prototype segway mini balancing robot dua roda ditunjukkan pada gambar 2.
Gambar 2 Blok diagram sistem robot
Perancangan Mekanik Robot
Desain perancangan mekanik robot pada prototype segway mini balancing robot dua roda yang dibuat ditunjukkan pada gambar 3.
Gambar 3Desain rancang bangun prototype segway mini balancing robot dua roda tampak depan.
Perangkat Keras Elektronis Robot
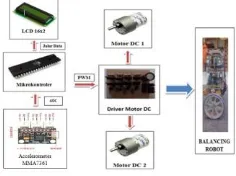
Perangkat keras elektronis robot terdiri dari sistem minimum mikrokontroler ATmega16, liquid crystal display (LCD), sensor accelerometer MMA7361, driver motor DC H-Bridge, dua buah motor DC gearbox. Arsitektur elektronis dan realisasi prototype segway mini balancing robot dua roda dengan kendali PID dapat dilihat pada gambar 4.
Gambar 4Arsitektur elektronis dan realisai prototype segway minibalancing robot dua roda
Perancangan perangkat lunak
Perancangan perangkat lunak (software) meliputi perancangan kendali PID dengan software BASCOM AVR. Perancangan algoritma kendali PID dengan software BASCOM AVR digunakan untuk mengendalikan sudut elevasi dari kemiringan robot. Nilai kesalahan yang dihasilkan akan diproses oleh algoritma kendali PID untuk menghasilkan sinyal kendali PID yang baik. Nilai kendali PID digunakan untuk mengatur duty cycle PWM yang digunakan untuk mengatur pergerakan robot agar stabil dan tegak lurus pada bidang datar. Flowchart pemrograman prototype segway mini balancing robot dua roda dapat dilihat pada gambar 5.a.
SENTRA IV-59 memamnfaatkan port serial miktokontroler dan port usb yang terhubung dengan usb to serial controller. GUI matlab yang digunakan untuk melihat kinerja robot dalam bentuk grafis ditunjukkan pada gambar 5.b.
Gambar 5 a.Flowchart pemrograman balancing robot b. GUI Matlab
Analisa Data
Analisa data digunakan untuk melihat kinerja robot dengan menggunakan kendali PID.
Hasil Penelitian dan Pembahasan
Pengujian Perangkat keras (Hardware)
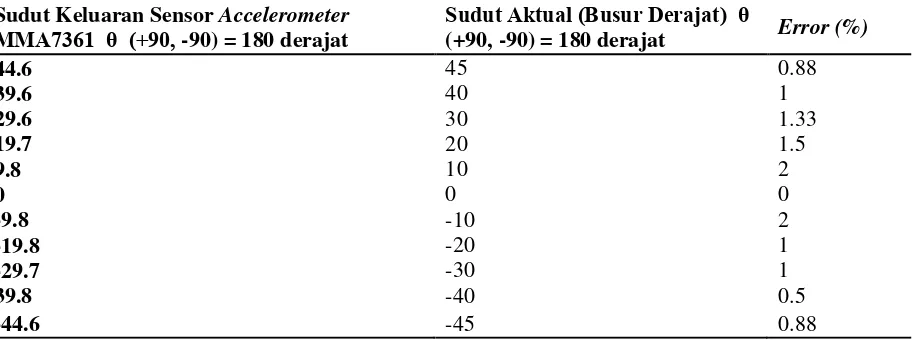
Pada pengujian ini diambil data sudut sensor accelerometer MMA7361 dan sudut aktual dari busur. Data dari pengujian ini dapat dilihat pada tabel 2. Pengujian perbandingan pengukuran sensor accelerometer MMA7361 terhadap sudut aktual pada busur.
Tabel 2 Hasil pengujian sensor accelerometer MMA7361 terhadap sudut aktual pada busur.
Dari tabel 1, dapat dilihat bahwa nilai persentase error tertinggi 2 % dan persentase error terendah adalah 0 %, sehingga rancangan sudut kemiringan robot menggunakan sensor accelerometer MA7361 layak digunakan.
Pengujian Perangkat Lunak (Software)
Pengujian perangkat lunak (software) pada penelitian ini menggunakan komunikasi serial yang dihubungkan ke komputer dengan bantuan software matlab 2009 untuk pengambilan data grafik sinyal kendali PID pada robot. Pengujian perangkat lunak (software) meliputi pengujian penentuan nilai parameter kendali PID dan pengujian sinyal kendali PID terhadap gangguan.
Sudut Keluaran Sensor Accelerometer
MMA7361 θ (+90, -90) = 180 derajat
Sudut Aktual (Busur Derajat) θ
(+90, -90) = 180 derajat Error (%)
44.6 45 0.88
39.6 40 1
29.6 30 1.33
19.7 20 1.5
9.8 10 2
0 0 0
-9.8 -10 2
-19.8 -20 1
-29.7 -30 1
39.8 -40 0.5
IV-60 SENTRA
Pengujian Penentuan Nilai Parameter Kendali PID.
Pengujian dilakukan dengan cara menjalankan robot pada suatu lantai datar. Pengujian dilakukan sebanyak 3 kali, dimana setiap pengujian diberikan parameter atau konfigurasi kendali PID yang berbeda-beda. Penentuan nilai parameter kendali proportional ( integral ( ), dan derivative ( ) dilakukan dengan cara trial and error dengan nilai set point 0˚.
Pada pengujian konfigurasi 1 dengan nilai parameter kendali PID yaitu = 4, = 2, = 1. Hasil pengujian ditunjukkan pada gambar 6. Dapat dilihat bahwa robot mampu mengatur pergerakannya agar stabil dan tegak lurus pada bidang datar dan kemudian bergerak mundur terus-menerus hingga akhirnya robot jatuh pada range sudut – 28 derajat. Pada grafik konfigurasi 1, kendali PID masih memiliki overshoot yang besar yaitu 31.32 %. Oleh karena itu sistem kendali PID menggunakan konfigurasi 1 belum stabil.
Gambar 6 Grafik respon konfigurasi 1 pada sudut kemiringan robot dengan kendaliPID.
Pengujian konfigurasi ke-2 dilakukan dengan dengan nilai parameter kendali PID yaitu = 4, = 2, = 4, Grafik respon robot terhadap kendali ditunjukkan pada gambar 7.
Gambar 7 Grafik respon konfigurasi 2 pada sudut kemiringan robot dengan kendaliPID.
Dapat dilihat bahwa robot sudah mampu mengatur pergerakannya agar stabil dan tegak lurus pada bidang datar dengan range -4˚ sampai 4˚, tetapi pergerakan robot masih terlihat kasar, belum halus dan masih terdapat overshoot yang besar yaitu 24.83%.
Pada pengujian konfigurasi 3 dengan nilai parameter kendali PID yaitu = 2, = 1, = 8, robot mampu mengatur pergerakannya agar stabil dan tegak lurus pada bidang datar antara range -3˚
sampai 3˚.
Gambar 8 Grafik respon konfigurasi 3 pada sudut kemiringan robot dengan kendaliPID.
SENTRA IV-61 pada gambar 8 pada konfigurasi 3 dengan nilai parameter kendali PID adalah = 2, = 1, = 8, sampling time (dt) = 10 ms.
Pengujian Sinyal Kendali PID Tanpa gangguan dan Terhadap Gangguan.
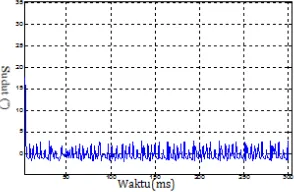
Pada pengujian sinyal kendali PID terhadap gangguan, robot diberi gangguan berupa dorongan dari depan atau belakang yang bertujuan untuk mengetahui tingkat keberhasilan kendali PID dalam mengatur pergerakan robot agar stabil dan tegak lurus pada bidang datar. Nilai parameter kendali PID dipilih yang paling optimal pada konfigurasi 3 yaitu = 2, = 1, = 8, dan sampling time (dt) = 10 ms. Grafik respon kendali PID tanpa ada ganguan dan terhadap gangguan dapat dilihat pada gambar 9.
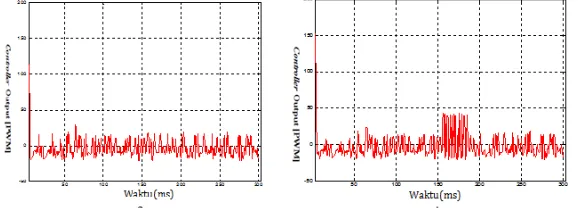
Gambar 9a.Grafik respon kendali PID tanpa ada ganguan, b. Grafik respon kendali PID terhadap ganguan.
Pada pengujian sinyal kendali PID terhadap gangguan berupa dorongan dari depan atau belakang, robot mampu mengembalikan pada kondisi steady state. Pada pengujian sinyal kendali PID tanpa gangguan dan terhadap gangguan, robot dapat mengatur pergerakannya agar stabil dan tegak lurus pada bidang datar. Pada pengujian kendali PID, jika sampling time terlalu besar, sistem loop tertutup mengalami osilasiyang sangat besar. Osilasi menyebabkan sistem mengalami ketidakstabilan. Jika sampling time (dt) terlalu rendah, maka akan menyebabkan respon keluaran sudut terlalu cepat. sampling time (dt) yang paling optimal pada penelitian ini adalah dt= 10 ms. Nilai parameter kendali PIDyang paling optimal adalah = 2, = 1, = 8,
Kesimpulan
Dari hasil pembahasan didapatkan beberapa kesimpulan yaitu sensor accelerometer MMA7361 dapat digunakan sebagai sensor sudut kemiringan robot dengan persentase error tertinggi 2 % dan persentase error terendah 0 %. Algoritma kendali PID dapat diterapkan pada sistem prototype segway mini balancing robot dua roda untuk mengatur pergerakan robot agar stabil dan tegak lurus pada bidang datar pada range -3º sampai 3º. Nilai parameter algoritma kendali PID yang optimal digunakan pada penelitian ini adalah
K
p = 2, Ki = 1, Kd = 8, dan sampling time (dt) = 10ms denganmaksimum overshoot (Mov) = 11.05%, settling time (Ts) = 2.99 detik, rise time(Tr) = 2.05 detik dan peak time (Tp)= 1 detik. Prototype segway mini balancing robot dua roda, mampu mengatur pergerakannya agar stabil dan tegak lurus pada bidang datar, terhadap gangguan berupa dorongan dari depan atau belakang dengan range gangguan maksimal adalah -11º sampai 11º.
Referensi
[1] Miranda, J. L. C., 2009, Aplication of Kalman Filtering and PID Control For Direct Inverted Pendulum Control, Tesis, Electrical and Computer Engineering, Electronic options, California State University, Chico.
[2] Ooi, R. C., 2003, Balancing a Two-Wheeled Autonomus Robot, Tesis, The University of Western Australia School of Mechanical Engineering, Australia.
[3] Cahyono, B N., 2013, Self Balancing Scooter Menggunakan Metode Proportional Integral Derivative, Transmisi, 15 (4): 165-169.
[4] Gunawan, A P., Subagiyo, H., dan Wahyuni, R T., 2013 Kontrol Kesetimbangan pada Robot Beroda Dua Menggunakan Pengendali PID dan Complementary Filter, Jurnal Teknik Elektro dan Komputer, 1 (1): 1-11.