STUDI KARAKTERISTIK HIDRODINAMIKA PADA SLIDER BEARING DENGAN PERMUKAAN SLIP DAN ATAU PERMUKAAN BERTEKSTUR - Diponegoro University | Institutional Repository (UNDIP-IR)
Teks penuh
Gambar
![Gambar 3.1. (a) Pembagian control volume 1 dimensi, (b) Panjang control volume [34]](https://thumb-ap.123doks.com/thumbv2/123dok/2240909.1231211/2.612.126.520.535.676/gambar-pembagian-control-volume-dimensi-panjang-control-volume.webp)
![Gambar 3.2. Grid 2 Dimensi [35]](https://thumb-ap.123doks.com/thumbv2/123dok/2240909.1231211/5.612.182.488.299.476/gambar-grid-dimensi.webp)
![Gambar 3.3. Grid 3 Dimensi [35]](https://thumb-ap.123doks.com/thumbv2/123dok/2240909.1231211/6.612.184.496.113.322/gambar-grid-dimensi.webp)
Dokumen terkait
Persamaan Reynolds adalah persamaan yang digunakan untuk menentukan tekanan pada fluid film ketika dua permukaan bergerak relatif satu sama laina. Untuk penyederhanaan,
Hasil simulasi yang berupa distribusi tekanan tak berdimensi menunjukan bahwa pada permukaan bertektur dan dengan sifat slip menghasilkan pengaruh yang positif terhadap
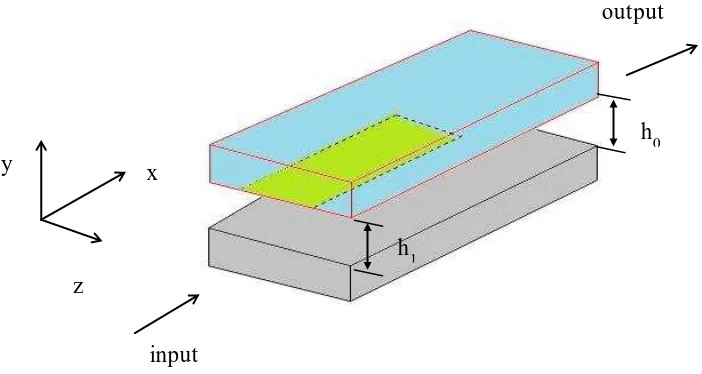
Menganalisa pengaruh slip terhadap performansi pelumasan pada slider bearing dengan kekasaran permukaan bertekstur rectangular dan sinusoidal dengan kontak heterogen slip/tanpa
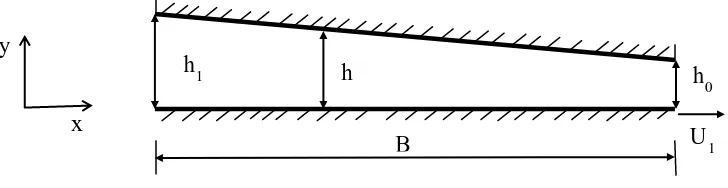
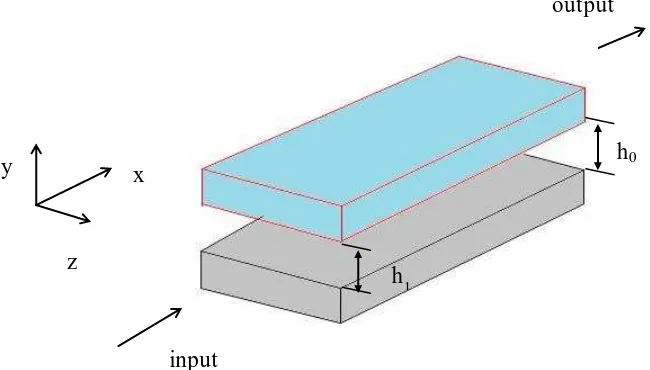
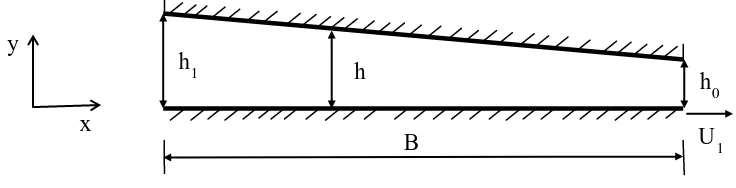
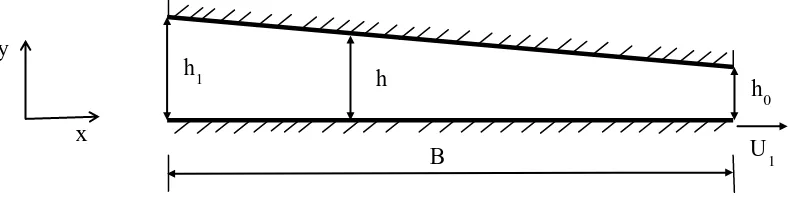
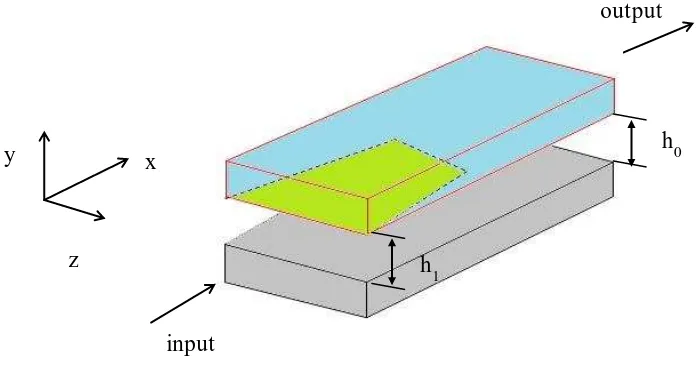
Konfiguransi dari skematik infinite width slider bearing dengan mixed slip surface yang telah dibangun pada kasus pertama, dibangun kembali pada kasus yang kedua.. Dalam
jika tekanan bearing cukup rendah. Ketika tekanan bearing relatif tinggi, walaupun tekanan positif akan naik tanpa batasan tertentu, tekanan negatif akan
Kemudian menentukan ketebalan film minimum awal.Langkah selanjutnya adalah menghitung koefisien persamaan Reynolds modifikasi yang telah dilakukan diskretisasi sesuai
[7] Zulfikar, A., 2010, Optimasi Daerah Slip pada Permukaan Bertekstur pada Pelumasan MEMS (Micro Electro Mechanical System), Tugas Akhir,.. Universitas
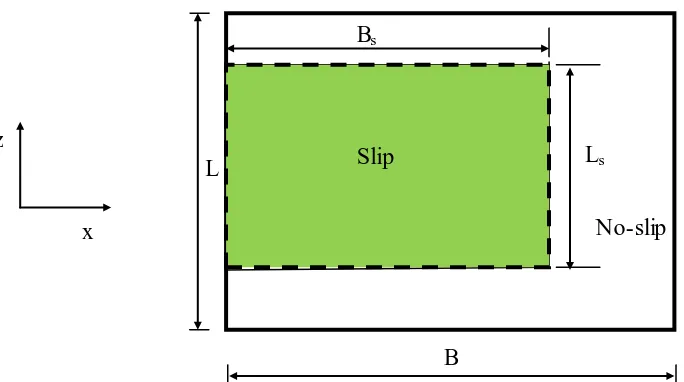
Hasil menunjukkan bahwa penggunaan kondisi mixed slip dengan daerah slip 65% dari permukaan akan menghasilkan load support yang paling besar dan menghasilkan friction
