SENSOR KECEPATAN
Tugas Mata Kuliah Sensor dan Transducer Oleh:
1. Agus Susanto 2. Alan Havis 3. Eva Susanti 4. Rico Bernando P
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS BENGKULU
2008
KATA PENGANTAR
Pertama-tama Puji Syukur senantiasa kami panjatkan kehadirat Tuhan Yang Maha Kuasa, atas rahmat dan karunianya sehingga kami dapat menyelesaiakan makalah ini,
Selanjutnya, kami ingin mengucapkan terima kasih kepada pihak-pihak yang telah membantu dalam penyelesaian makalah ini yaitu:
1. Bapak Reza Satria R, S. T. sebagai dosen mata kaliah Sensor dan Transducer.
2. Teman-teman seperjuangan Program Studi Teknik Elektro, yang telah memberikan saran dalam pembuatan makalah ini.
Semoga semua bantuan yang telah berikan mendapat imbalan yang setimpal dari Tuhan Yang Maha kuasa. Amin.
Terakhir kami berharap agar makalah ini dapat memberikan kontribusi yang posisitif bagi kita semua dalam pengembangan ilmu pengetahuan sensor dan transducer.
Bengkulu, Maret 2008 Penulis
SENSOR KECEPATAN
Sensor kecepatan atau velocity sensor merupakan suatu sensor yang digunakan untuk mendeteksi kecepatan gerak benda untuk selanjutnya diubah kedalam bentuk sinyal elektrik. Dalam prakteknya ada beberapa sensor yang digunakan untuk berbagai keperluan ini, sensor-sensor tersebut diantaranya:
• Tachometer dan Stroboscope
• Kabel Piezoelectric
• Muzzle velocity
• Encoder Meter
1. Tachometer dan Stroboscope
1.1. Tachometer
Pada setiap pelatihan audit pengukuran kecepatan misalnya untuk motor, pengukurannya sangat kritis karena kemungkinan terdapat perubahan frekuensi, slip pada belt dan pembebanan. Dalam hal ini ada dua jenis alat pengukur kecepatan yaitu tachometer dan stroboscope. Tachometer.
Tachometer sederhana adalah jenis alat kontak, yang dapat digunakan untuk mengukur kecepatan yang memungkin kan dapat diakses secara langsung.
Tachometer biasanya merupakan magnet permanen generator DC kecil. Jika generator berotasi akan menghasilkan tegangan DC yang proporsional langsung terhadap kecepatan.
Gambar 1. Tachometer
Pada tachometer, roda tachometer dikontakkan dengan badan yang berputar. Karena adanya gesekan diantara keduanya, setelah beberapa detik kecepatan roda tachometer sama dengan kecepatan poros berputar. Kecepatan ini ditampilkan pada panel sebagai putaran per menit (rpm). Kecepatan dari putaram poros diukur menggunakan magnetik pick up sensor.
Kumparan kecil yang terletak dekat magnet menerima pulsa setiap kali magnet lewat. Dengan mengukur frekuensi pulsa maka kecepatan poros bisa ditentukan. Tegangan yang keluar adalah sangat kecil dan membutuhkan proses penguatan (amplifikasi) untuk bisa diukur.
1.2. Stroboscope
Stroboscope merupakan salah satu alat yang lebih canggih dan aman untuk mengukur kecepatan dengan cara tanpa kontak. Stroboscope menggunakan sumber sinar cahaya yang dapat disinkronisasi dengan setiap kecepatan dan pengulangan gerakan sehingga benda yang berpindah sangat cepat terlihat tidak bergerak atau berpindah perlahan
Gambar 3. Stroboscope
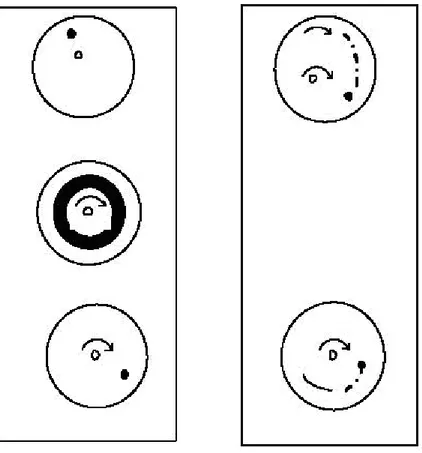
Contoh penggunaan dari stroboscope ini dapat dilakukan dengan memasang sebuah disket putih dengan titik hitam terpasang pada poros (as) dari motor 1800 rpm. Bila disket berputar pada 1800 rpm; tidak mungkin terlihat oleh mata gambaran tunggal dan titik akan tampak menjadi lingkaran kabur. Bila diterangi oleh cahaya stroboscope, maka cahaya akan disinkronkan dengan setiap putaran disket. sebagai contoh bila titik berada pada jam tiga, titik akan terlihat pada posisi ini pada kecepatan 1800 kali untuk setiap menit. Oleh karena itu, titik akan nampak diam pada posisi tadi.
Jika laju sinar dari stroboscope diperlambat menjadi 1799 sinar per menit, titik akan teriluminasi pada posisi cahaya yang berbeda, setiap kali
piringan berputar, dan titik akan tampak berpindah. Perlahan dalam arah putaran 360° dan tiba pada posisi sebenarnya 1 menit kemudian. Perpindahan yang sama, tetapi di arah yang berlawanan rotasi dari titik, akan diobservasi jika laju sinar dari stroboscope ditingkatkan menjadi 1801 rpm. Jika diinginkan, laju perpindahan yang tampak dapat dipercepat dengan meningkatkan atau menurunkan laju sinar pada stroboscope.
Gambar 4. Prinsip kerja stroboscope
Untuk studi audit pada umumnya digunakan jenis kontak
tachometer karena alat tersebut sudah siap tersedia. Tachometer dan stroboscope digunakan untuk mengukur kecepatan putaran motor, fan,
pully , dan lain sebagainya.
Stroboscope digital merupakan sumber cahaya yang digunakan
untuk mengukur kecepatan obyek yang bergerak cepat atau untuk menghasilkan efek optik menghentikan atau memperlambat gerakan
kecepatan tinggi untuk keperluan pengamatan, analisis atau fotografi kecepatan tinggi.
Stroboscope memancarkan intensitas tinggi, waktu pendek sinar
cahaya. Peralatan memberi gambaran pulsa elektronik dari generator yang mengkontrol laju sinar, pasokan daya pada jalur operasi, dan dioda pemancar cahaya (LED) yang terbaca dalam nyala per menit. Cahaya dapat ditujukan pada hampir semua obyek berpindah, termasuk pada area yang tidak dapat diakses. Bila mengukur kecepatan perputaran obyek, atur laju cahaya awal mendekati yang tertinggi dari perkiraan kecepatan obyek. Kemudian, perlahan mengurangi laju cahaya sampai dengan satu gambar tampak. Pada titik ini, laju cahaya stroboscope setara dengan putaran kecepatan obyek, dan kecepatan dapat dibaca secara langsung dari tampilan digital.
2. Kabel Piezoelectric
Efek Apiezoelectric diterapkan ke dalam suatu sensor kecepatan getaran dengan wujud suatu kabel mineral-insulated. Kabel seperti itu menghasilkan suatu isyarat elektris yang akan disampaikan ke suatu penerjemah ketika permukaan luar kabel dimampatkan. Kabel piezoelectric telah digunakan dalam berbagai eksperimen untuk memonitor getaran di dalam turboshaft mesin pesawat terbang. Aplikasi lain meliputi pendeteksi dan analisa lalu lintas mobil.
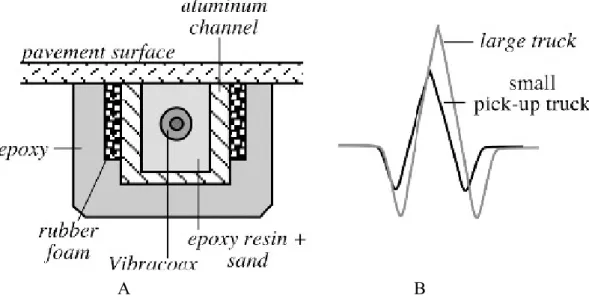
Di dalam aplikasi ini, kabel dikuburkan ke dalam trotoar jalan raya, dengan posisi tegak lurus terhadap lalu lintas tersebut. Sensor dirancang untuk menjadi sensitip terutama pada tekanan vertikal. Suatu kabel piezoelectric terdiri dari suatu tembaga yang dibatasi oleh pelindung padat sekitar 3-mm garis tengah luar, piezoelectric bubuk ceramic, dan suatu inti tembaga bagian dalam ( Gambar 6). Bubuk dengan ketat dimampatkan antar pelindung yang luar dan inti tersebut.
Gambar 6. Aplikasi kabel piezoelectric di dalam jalan raya yang monitoring: ( A) pemasangan sensor di dalam trotoar; ( B) bentuk dari
tanggapan elektrik.
Ketika sensor kabel pasang di dalam trotoar (Gambar 10), responnya atau nilai keluaranya harus dikalibrasi, sebab bentuk isyarat dan amplitudonya tidak hanya tergantung pada kandungan kabel tetapi juga pada jenis trotoar dan kelas jalannya. Keluaran elektriknya sebanding terhadap tekanan yang diberikan terhadap kabel tersebut. Panjang dan tipisnya piezoelectric akan membatasi lapisan memberikan suatu impedans keluaran yang rendah. Cakupan yang dinamis kabel adalah substansial (> 200 dB), sehingga dapat merasakan lebih jauh, yaitu
getaran amplitudo panjang yang disebabkan oleh hujan, namun menjawab secara linier kepada dampak dari truk berat. Kabel mempunyai kemampuan tekanan 100 MPA. Juga dapat beroperasi pada temperatur - 400C sampai + 1250C..
3. Muzzle Velocity
LED dan Phototransistor dipilih sebagai sensor pada peralatan ukur ini. LED sebagai sumber cahaya infra red dan Phototransistor sebagai penerima / detektor cahaya infra red.
Muzzle Velocity adalah kecepatan awal peluru, yaitu kecepatan proyektil peluru saat keluar dari ujung laras senjata yang menembakkannya. Peralatan ukur Muzzle Velocity adalah perangkat elektronika yang dirancang untuk mengukur kecepatan awal peluru senjata organik atau peluru kaliber kecil. Hasil pengukuran dapat ditampilkan melalui penampil LCD, juga dapat dicetak pada printer melalui output serial. Dari hasil pengukuran dan percobaan, komponen-komponen peralatan ukur muzzle velocity dan modul software : LCD, RTC, beserta perhitungan kecepatan, dapat berfungsi sesuai dengan yang direncanakan. s I n f r a R e d s e b a g a i s u m b e r c a h a y a P h o t o t r a n s i s t o r s e b a g a i d e t e k t o r p r o y e k t i l i n p u t s e n s o r s t a r t s t o p
Peluru ditembakan pada ujung peralatan. Pada sistem ini digunakan LED InfraRed dan Phototransistor sebagai sensor. Pada pengukuran kecepatan peluru ada dua sensor yang dilewati peluru, pada saat peluru melewati sensor pertama akan menyebabkan output phototransistor mengalami perubahan. Output Phototransistor tersebut akan masuk ke interupt prosesor. Pada saat peluru lewat sensor kedua terjadi perubahan output phototransistor, lalu diteruskan ke interupt prosesor. Sinyal pertama mengaktifkan (start) counter dan sinyal kedua menghentikan (stop) counter.
Berdasarkan penjelasan di atas maka dapat diringkas prinsip kerja dari Muzzle Velocity sebagai berikut :
Gambar 8. Diagram Blok prinsip kerja Muzzle Velocity
Waktu yang diperlukan gerakan peluru dari sensor pertama kesensor kedua dapat diukur, sedangkan jarak antara dua sensor adalah tetap sehingga kecepatan peluru dapat dihitung dengan rumus:
t
s
V
=
Fungsi sensor ini adalah sebagai menerima sinyal cahaya inframerah yang dipancarkan oleh LED jenis GaAs Infrared Emitting
Diode. Saat peluru melintas dan memotong cahaya dari LED, intensitas
cahaya yang diterima oleh sensor akan berubah. Secara elektris hal di atas berarti terjadi perubahan tegangan bias pada phototransistor serta tegangan output dari sensor pun berubah. Pengkondisi sinyal adalah berupa rangkaian elektronik yang terdiri atas rangkaian penguat transistor dan rangkaian Comparator, berfungsi mengkondisikan sinyal sinyal listrik
Keluaran dari
yang diterima dari sensor agar sesuai dengan karakteristik sinyal input mikrokontroler. Perubahan intensitas cahaya pada sensor pun hanya dinyatakan dalam 2 keadaan, yaitu berubah (saat peluru memotong jalur cahaya dari LED) atau tetap (tidak ada peluru yang lewat).
Pada aplikasi muzzle velocity ini, fungsi prosesor selaku pengendali adalah menerima dan mengolah data dari keypad, menerima sinyal interupsi dari sensor phototransistor yang berarti ada peluru yang melewati sensor, memberi instruksi kepada counter untuk start atau stop,memproses atau menghitung data dari sensor dan counter untuk memperoleh harga kecepatan peluru, memberi instruksi kepada display untuk menampilkan hasil perhitungan,dan memberi instruksi kepada printer untuk mencetak hasil pengukuran. Counter adalah perangkat eksternal yang terdiri dari clock generator dan 16 bit binary.
4. Encoder Meter
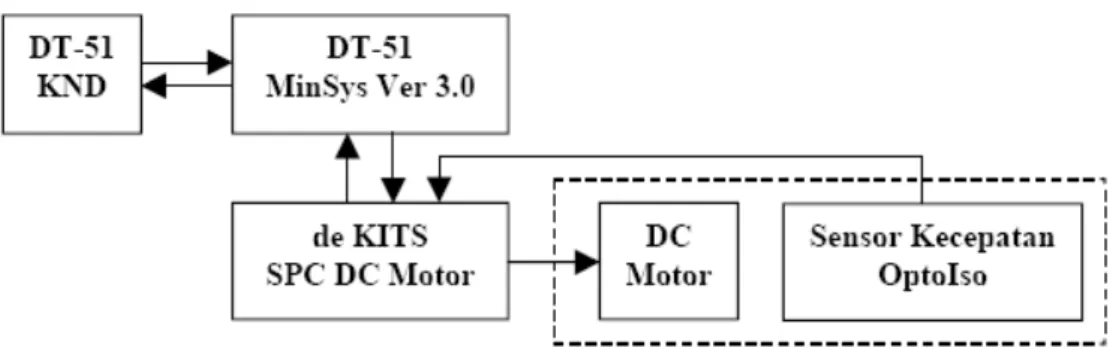
Aplikasi 'Automatic Transmission with Encoder Meter and Display' ini adalah umtuk menghitung pulsa kecepatan motor dan menampilkannya di 7 segment. Modul yang digunakan adalah 51 MinSys Ver 3.0, DT-51 KND, de KITS SPC DC Motor (K6), Motor DC, dan rangkaian Sensor Kecepatan.
Hubungan antara DT-51 MinSys Ver 3.0 dan de KITS SPC DC Motor adalah sebagai berikut:
de KITS SPC DC Motor
DT-51 MinSys Ver 3.0Port C & Port 1 SCL / J7 Pin 15 Pin 15 (Port 1.6) SDA / J7 Pin 16 Pin 16 (Port 1.7)
Tabel 1. Hubungan DT-51 MinSys dengan de KITS SPC DC Motor
Cara menghubungkan DT-51 KND dengan DT-51 MinSys dapat dilihat pada DT-51 KND User's Guide. Cara menghubungkan DC motor
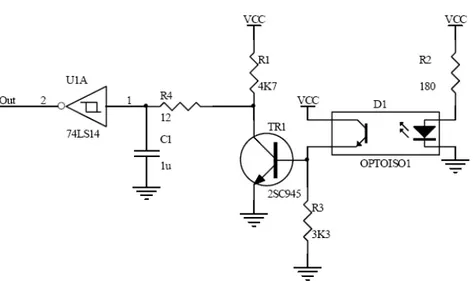
dengan de KITS SPC DC Motor dapat dilihat pada Manual de KITS SPC DCMotor. Rangkaian Sensor Kecepatan menggunakan OptoIsolator/OptoCoupler model "U" (860D) dapat dilihat padagambar berikut :
Gambar 9. Rangkaian Sensor Kecepatan
Dengan dibantu lempeng lingkaran yang dilubangi, sensor kecepatan akan menghasilkan pulsa high ( ) jika terdapat lubang. Posisi sensor secara mekanis dapat dilihat pada gambar 2. Perlu diingat bahwa jumlah lubang yang dibuat akan mempengaruhi hasil tampilan di DT-51 KND. Makin banyak lubang maka pembacaan akan makin sering dan jika dikonversi ke RPM akan didapat hasil yang makin mendekati kondisi aslinya.
Gambar 10. Posisi Mekanis
Hubungan antara de KITS SPC DC Motor dengan rangkaian sensor ini adalah sebagai berikut:
Tabel 2. Hubungan de KITS SPC DC Motor dengan Rangkaian Sensor
Setelah menghubungkan rangkaian dan menghubungkan supply tegangan yang tepat, download-lah program RPMDISP.HEX ke DT-51 MinSys Ver3.0.
Adapun blok diagram sistem secara keseluruhan adalah sebagai berikut:
Rangkaian Sensor Kecepatan berfungsi untuk mendeteksi jumlah putaran per satuan waktu. Hal ini telah diakomodasi oleh de KITS SPC DC Motor pada IN1 untuk mendeteksi pulsa kecepatan motor. DT-51 KND berfungsi sebagai input transmisi (Top, Brake, Up, Down, Neutral) pada keypad dan output display pada 7 segment.
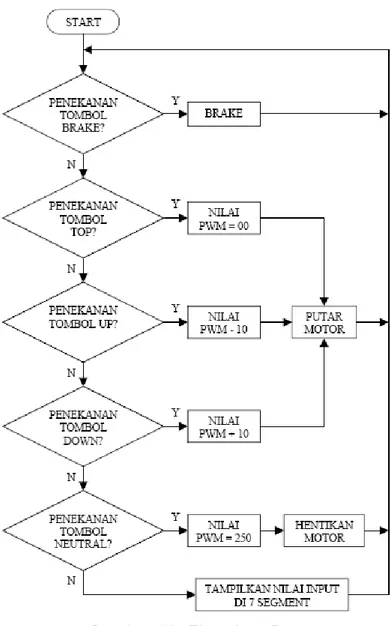
Penekanan TOP akan memutar motor pada kecepatan maksimum (tanpa PWM). Penekanan Up atau Down akan mengurangi atau menambah nilai PWM sebesar 10d. Penekanan N akan menghentikan putaran motor. Penekanan Brake akan menghentikan putaran motor secara cepat (layout dapat dilihat pada gambar 4). Selain itu, DT-51 KND juga berfungsi untuk menampilkan hasil penghitungan pulsa kecepatan motor (dalam desimal). Setiap 1 detik tampilan pada 7 segment akan di-update. Tampilan hanya menyatakan jumlah pulsa bukan menyatakan kecepatan motor dalam RPM.
Jika ingin menghitung RPM, maka bisa dihitung dengan rumus:
GateTime detik 60 Lubang Jumlah Tampilan Hasil Χ = RPM
Pada RPMDISP.ASM digunakan GateTime 1 detik sehingga rumus menjadi: detik 60 Lubang Jumlah Tampilan Hasil Χ = RPM
Jika hasil tampilan sebesar 135 pulsa dengan jumlah lubang 16, berarti kecepatan putaran motor sekitar 506 RPM.
Gambar 12. Alokasi Keypad DT-51 KND
Flowchart dari sistem ini adalah sebagai berikut: