TERMINOLOGI PADA SENSOR
Tutorial ini merupakan bagian dari Seri Pengukuran Fundamental Instrumen Nasional. Setiap tutorial dalam seri ini, akan mengajarkan anda tentang topik spesifik aplikasi pengukuran umum, dengan menjelaskan teori dan memberikan contoh-contoh praktis. Tutorial ini akan mencakup sensor dan terminologi yang terkait dengan mereka. Untuk daftar lengkap tutorial, kembali ke NI Pengukuran Dasar Halaman Utama, yaitu : 1. Sensitivitas / Kepekaan 2. Rentang / Jarak 3. Presisi / ketelitian 4. Resolusi 5. Akurasi / Ketepatan 6. Mengimbangi 7. linearitas 8. histeresis 9. Waktu Respon 10. Linearitas Dinamis 1. Sensitivitas
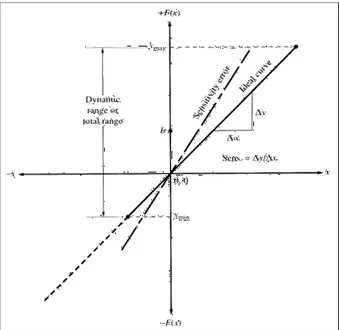
Sensitivitas sensor didefinisikan sebagai kemiringan output kurva karakteristik (DY / DX pada Gambar 1) atau, lebih umum, masukan minimal parameter fisik yang akan membuat perubahan output yang terdeteksi. Dalam beberapa sensor, sensitivitas didefinisikan sebagai masukan parameter perubahan yang diperlukan untuk menghasilkan perubahan output yang standar. Pada orang lain, itu didefinisikan sebagai perubahan tegangan output untuk perubahan yang diberikan dalam parameter masukan. Sebagai contoh, transduser tekanan darah khas mungkin memiliki rating sensitivitas 10 mV / V / mm Hg ; yaitu, akan ada tegangan output 10-mV untuk setiap volt potensi eksitasi dan setiap mm Hg diterapkan tekanan.
Kesalahan sensitivitas.
Kesalahan sensitivitas (ditampilkan sebagai kurva putus-putus pada Gambar 1) adalah keberangkatan dari lereng ideal dari kurva karakteristik. Untuk Misalnya, transduser tekanan dibahas di atas mungkin memiliki sensitivitas yang sebenarnya dari 7,8 mV / V / mm Hg bukan 10 mV / V / mm Hg.
2. Rentang
Rentang sensor adalah nilai-nilai maksimum dan minimum dari parameter yang diterapkan yang dapat diukur. Sebagai contoh, diberikan sensor tekanan mungkin memiliki berbagai -400 ke 400 mm Hg. Atau, rentang positif dan negatif sering tidak sama. Untuk misalnya, transduser tekanan darah medis tertentu ditentukan untuk memiliki minimal (vakum) batas -50 mm Hg (Ymin dalam Gambar 1) dan maksimum (tekanan) batas 450 mm Hg (Ymax pada Gambar 1). Spesifikasi ini umum, kebetulan, dan merupakan salah satu alasan dokter dan perawat kadang-kadang merusak sensor
tekanan darah saat mencoba untuk mengambil darah melalui jalur arteri tanpa menjadi sadar posisi stopcocks cairan dalam sistem. Sebuah jarum suntik kecil dapat mengerahkan vakum yang luar biasa pada tertutup sistem.
Gambar 1. Ideal kurva dan kesalahan sensitivitas. Sumber : J.J. Carr, Sensor dan Sirkuit Prentice Hall.
Rentang dinamis.
Rentang dinamis adalah total jangkauan sensor dari minimum ke maksimum. Artinya, dalam hal Gambar 1, Rdyn = Ymax - l - Ymin l.
3. Presisi
Konsep presisi mengacu pada tingkat reproduksibilitas pengukuran. Dengan kata lain, jika nilai yang sama persis yang diukur beberapa kali, sebuah sensor yang ideal akan output nilai yang sama persis setiap kali. Tapi sensor nyata keluaran berbagai nilai didistribusikan dalam beberapa cara relatif terhadap nilai yang benar yang sebenarnya. Misalnya, tekanan persis 150 mm Hg diterapkan untuk sensor. Bahkan jika tekanan diterapkan tidak pernah berubah, nilai-nilai output dari sensor akan bervariasi. Beberapa masalah halus muncul dalam soal presisi ketika nilai sebenarnya dan nilai rata-rata sensor tidak berada dalam jarak tertentu satu sama lain (misalnya, 1-s berbagai kurva distribusi normal).
4. Resolusi
Spesifikasi ini adalah perubahan inkremental terkecil terdeteksi parameter masukan yang dapat dideteksi dalam sinyal output. Resolusi dapat dinyatakan baik sebagai proporsi membaca (atau membaca skala penuh) atau secara absolut.
5. Akurasi
Ketepatan sensor adalah perbedaan maksimum yang akan ada di antara nilai aktual (yang harus diukur oleh standar sekunder primer atau baik) dan nilai yang ditunjukkan pada output dari sensor. Sekali lagi, akurasi dapat dinyatakan baik sebagai persentase dari skala penuh atau secara absolut.
6. Offset
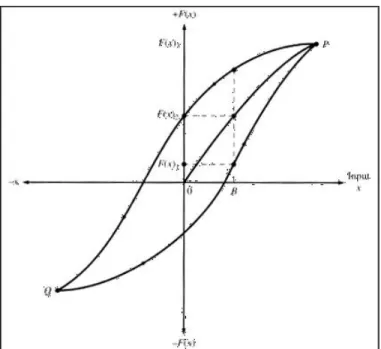
Kesalahan offset transducer didefinisikan sebagai output yang akan ada ketika harus nol atau sebaliknya, perbedaan antara nilai output aktual dan nilai output yang ditentukan di bawah beberapa set tertentu dari kondisi. Contoh pertama Situasi dalam hal Gambar 1 akan ada jika kurva karakteristik memiliki sensitivitas kemiringan sama dengan ideal tapi menyeberangi Y-axis (output) pada b bukan nol. Contoh bentuk lain dari offset terlihat pada kurva karakteristik elektroda pH ditunjukkan pada Gambar 2. Kurva yang ideal akan hanya ada pada satu suhu (biasanya 25 ° C), sedangkan kurva aktual akan antara suhu minimum dan batas suhu maksimum tergantung pada suhu sampel dan elektroda.
Gambar 2. Khas pH elektroda kurva karakteristik sensitivitas temperatur menunjukkan. Sumber : J.J. Carr, Sensor dan Sirkuit Prentice Hall.
7. Linearitas
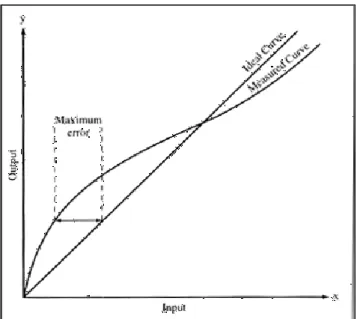
Linearitas transduser adalah ekspresi dari sejauh mana kurva diukur sebenarnya dari sensor berangkat dari ideal melengkung. Gambar 3 menunjukkan hubungan agak berlebihan antara yang ideal, atau setidaknya kotak masuk, garis dan aktual diukur atau garis kalibrasi (Catatan dalam banyak kasus, kurva statis digunakan untuk menentukan
linearitas, dan ini mungkin menyimpang agak dari dinamis linearitas) Linearitas sering ditentukan dalam hal persentase non-linear, yang didefinisikan sebagai :
Dimana :
a. Nonlinier (%) adalah persentase non-linear b. D adalah deviasi input maksimum
c. IN adalah maksimum, masukan skala penuh
d. Non-linear statis didefinisikan oleh Persamaan 6-1 sering tunduk pada faktor lingkungan, termasuk suhu, getaran, akustik tingkat kebisingan, dan kelembaban. Hal ini penting untuk mengetahui dalam kondisi apa spesifikasi tersebut valid dan keberangkatan dari orang- kondisi mungkin tidak menghasilkan perubahan linear dari linearitas.
8. Histeresis
Sebuah transduser harus mampu mengikuti perubahan parameter masukan terlepas dari arah mana perubahan dibuat, histeresis adalah ukuran dari properti ini. Gambar 4 menunjukkan kurva hysteresis khas. Perhatikan bahwa itu penting dari arah mana perubahan dibuat. Mendekati nilai masukan tetap (titik B pada Gambar 4) dari nilai yang lebih tinggi (titik P) akan menghasilkan yang berbeda indikasi dari mendekati nilai yang sama dari nilai yang lebih rendah (titik Q atau nol). Perhatikan bahwa nilai input B dapat diwakili oleh F (X), F (X), atau F (X) tergantung pada langsung sebelumnya nilai-jelas kesalahan karena histeresis.
Gambar 3. Ideal vs diukur kurva error menunjukkan linearitas. Sumber : J J Carr, Sensor dan Sirkuit Prentice Hall.
Gambar 4. Kurva histeresis. Sumber : J.J. Carr, Sensor dan Sirkuit Prentice Hall.
9. Waktu Respon
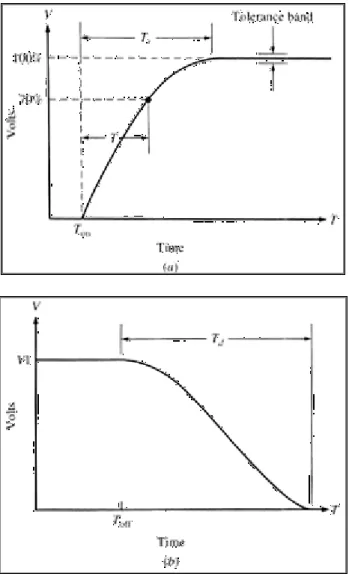
Sensor tidak mengubah keadaan keluaran segera ketika parameter perubahan masukan terjadi. Sebaliknya, itu akan berubah menjadi negara baru selama periode waktu, yang disebut waktu respon (T pada Gambar 5). Waktu respon dapat didefinisikan sebagai waktu yang diperlukan untuk sensor output berubah dari keadaan sebelumnya dengan nilai menetap akhir dalam sebuah band toleransi dari nilai baru yang benar. Konsep ini agak berbeda dari gagasan konstanta waktu (T) dari sistem. Istilah ini dapat didefinisikan dengan cara yang sama dengan yang untuk kapasitor pengisian melalui perlawanan dan biasanya kurang dari waktu respon.
Kurva pada Gambar 5 menunjukkan dua jenis waktu respon. Pada Gambar 5a kurva mewakili waktu respon menyusul tiba-tiba positif akan langkah perubahan-fungsi dari parameter masukan. Bentuk yang ditunjukkan pada Gambar 5b adalah waktu peluruhan (T untuk membedakan dari T, karena mereka tidak selalu sama) dalam menanggapi akan langkah perubahan-fungsi negatif dari parameter masukan.
Gambar 5. (a) definisi waktu naik; (b) definisi waktu turun . Sumber : J.J. Carr, Sensor dan Sirkuit Prentice Hall.
10. Dinamis Linearitas
Linearitas dinamis sensor adalah ukuran dari kemampuannya untuk mengikuti perubahan yang cepat dalam parameter masukan. Distorsi amplitude karakteristik, karakteristik fase distorsi, dan waktu respon yang penting dalam menentukan linearitas dinamis. Mengingat system histeresis rendah (selalu diinginkan), respon amplitudo diwakili oleh:
F (X) = aX + bX + cX + DX + ••• + K (02/06)
Dalam Persamaan 6-2, istilah F (X) adalah sinyal output, sedangkan istilah X mewakili parameter input dan harmoniknya, dan K adalah diimbangi konstan (jika ada). Harmonik menjadi sangat penting ketika harmonik kesalahan yang dihasilkan oleh aksi sensor jatuh ke dalam pita frekuensi yang sama dengan harmonik alami yang
dihasilkan oleh aksi dinamis dari parameter masukan. Semua kontinyu bentuk gelombang yang diwakili oleh serangkaian Fourier dari gelombang sinus fundamental dan harmonik nya. Dalam setiap gelombang non sinusoidal (termasuk perubahan waktu bervariasi dari parameter fisik). Harmonik hadir akan yang dapat dipengaruhi oleh tindakan dari sensor.
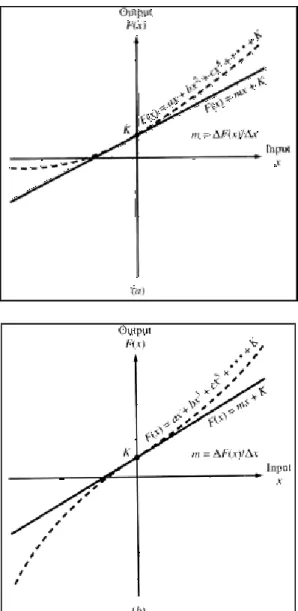
Gambar 6. Menunjukkan keluaran melawan kurva sinyal input (a) kuadrat kesalahan; (b) kubik kesalahan. Sumber : J.J. Carr, Sensor dan Sirkuit Prentice Hall.
Sifat non-linear dari kurva kalibrasi (Gambar 6) mengatakan sesuatu tentang yang harmonik hadir. Pada Gambar 6a, kurva kalibrasi (ditampilkan sebagai garis putus-putus) adalah asimetris, sehingga hanya istilah harmonik aneh ada. Dengan asumsi bentuk untuk yang ideal kurva F (x) = mx + K, Persamaan 6-2 menjadi untuk kasus simetris :
Dalam jenis lain dari kurva kalibrasi (Gambar 6b), nilai-nilai yang ditunjukkan simetris tentang mx yang ideal + K kurva. Pada kasus ini, F (X) = -F (X), dan bentuk Persamaan 6-2 adalah :
F (X) = aX + bX + cX + ••• + K (04/06)
Sekarang kita akan melihat pada beberapa kriteria pengolahan taktik dan sinyal yang dapat disesuaikan dengan aplikasi biomedis untuk meningkatkan sifat data yang dikumpulkan dari sensor.