BAB 2
TINJAUAN PUSTAKA
2.1. Kadar Air
Kadar air tanah dinyatakan dalam persen volume yaitu persentase volume
air terhadap volume tanah. Air mempunyai fungsi yang penting dalam tanah,
antara lain pada proses pelapukan mineral dan bahan organik tanah, yaitu reaksi
yang mempersiapkan hara larut bagi pertumbuhan tanaman. Selain itu, air juga
berfungsi sebagai media gerak hara ke akar-akar tanaman.Akan tetapi, jika air
terlalu banyak tersedia, hara-hara dapat tercuci dari daerah-daerah perakaran atau
bila evaporasi tinggi, garam-garam terlarut mungkin terangkat kelapisan tanah
atas.Air yang berlebihan juga membatasi pergerakan udara dalam tanah,
merintangi akar tanaman memperoleh O2 sehingga dapat mengakibatkan tanaman mati.
Dua fungsi yang saling berkaitan dalam penyediaan air bagi tanaman yaitu
memperoleh air dalam tanah dan pengaliran air yang disimpan ke akar-akar
tanaman.Jumlah air yang diperoleh tanah sebagian bergantung pada kemampuan
tanah yang menyerap air cepat dan meneruskan air yang diterima dipermukaan
tanah ke bawah. Akan tetapi jumlah ini juga dipengaruhi oleh faktor-faktor luar
seperti jumlah curah hujan tahunan dan sebaran hujan sepanjang tahun
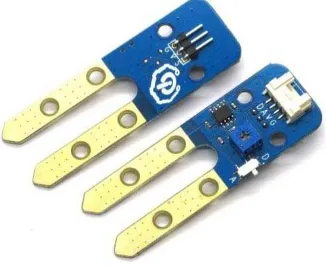
2.2.Sensor Soil Moisture
Moisture sensor adalah sensor yang dapat mendeteksi kadar air dalam
tanah. Sensor ini sangat sederhana, tetapi ideal untuk memantau tanaman, atau
tingkat air pada tanaman/tumbuhan pekarangan anda.
Sensor ini terdiri dua probe untuk melewatkan arus melalui tanah,
kemudian membaca resistansinya untuk mendapatkan nilai tingkat kadar air.
Semakin banyak air membuat tanah lebih mudah menghantarkan listrik (resistansi
kecil), sedangkan tanah yang kering sangat sulit menghantarkan listrik (resistansi
Sensor ini sangat membantu Anda untuk mengingatkan tingkat kadar air pada
tanaman anda atau memantau kadar air tanah di kebun anda.
Gambar 2.1 Sensor Soil Moisture
2.3. Arduino Nano
Arduino Nano adalah salah satu dari produk board mikrokontroller
keluaran Arduino. Arduino Nano adalah board Arduino terkecil, menggunakan
mikrokontroller Atmega 328 untuk Arduino Nano 3.x dan Atmega168 untuk
Arduino Nano 2.x. Varian ini mempunyai rangkaian yang sama dengan jenis
Arduino Duemilanove, tetapi dengan ukuran dan desain PCB yang berbeda.
Arduino Nano tidak dilengkapi dengan soket catudaya, tetapi terdapat pin untuk
catu daya luar atau dapat menggunakan catu daya dari mini USB port.Arduino
Nano didesain dan diproduksi oleh Gravitech.
Arduino Nano dapat diaktifkan melalui koneksi USB Mini-B, atau melalui
catu daya eksternal dengan tegangan belum teregulasi antara 6-20 Volt yang
dihubungkan melalui pin 30 atau pin VIN, atau melalui catu daya eksternal
dengan tegangan teregulasi 5 volt melalui pin 27 atau pin 5V. Sumber daya akan
secara otomatis dipilih dari sumber tegangan yang lebih tinggi. Chip FTDI
FT232L pada Arduino Nano akan aktif apabila memperoleh daya melalui USB,
ketika Arduino Nano diberikan daya dari luar (Non-USB) maka Chip FTDI tidak
aktif dan pin 3.3V pun tidak tersedia (tidak mengeluarkan tegangan), sedangkan
LED TX dan RX pun berkedip apabila pin digital 0 dan 1 berada pada posisi
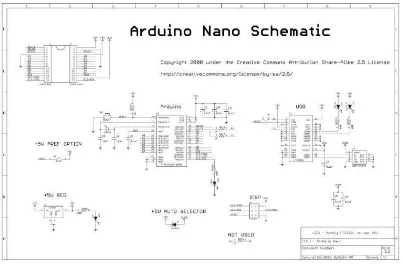
Skema dan desain board Arduino Nano
Skema rangkaian Arduino Nano dapat dilihat pada gambar berikut ini.
Gambar 2.2 Skematik Arduino Nano
Gambar di bawah ini menunjukan layout board Arduino Nano serta keterangan
pin-pin yang terdapat pada board Arduino Nano.
Gambar 2.3 Gambar Konfigurasi Pin Arduino Nano
Arduino Nano dapat menggunakan catudaya langsung dari mini-USB port
atau menggunakan catudaya luar yang dapat diberikan pada pin30 (+) dan pin 29
(-) untuk tegangan kerja 7 – 12 V atau pin 28 (+) dan pin 29 (-) untuk tegangan
2.3.1 Memori
Atmega 168 dilengkapi dengan flash memori sebesar 16 kbyte yang dapat
digunakan untuk menyimpan kode program utama. Flash memori ini sudah
terpakai 2 kbyte untuk program boatloader sedangkan Atmega328 dilengkapi
dengan flash memori sebesar 32 kbyte dan dikurangi sebesar 2 kbyte untuk
boatloader. Selain dilengkapi dengan flash memori, mikrokontroller ATmega168
dan ATmega328 juga dilengkapi dengan SRAM dan EEPROM.SRAM dan
EEPROM dapat digunakan untuk menyimpan data selama program utama
bekerja. Besar SRAM untuk ATmega168 adalah 1 kb dan untuk ATmega328
adalah 2 kb sedangkan besar EEPROM untuk ATmega168 adalah 512 b dan
untuk ATmega328 adalah 1 kb.
2.3.2 Input dan Output
Arduino Nano mempunyai 14 pin digital yang dapat digunakan sebagai
pin input atau output. Pin ini akan mengeluarkan tegangan 5V untuk mode HIGH
(logika 1) dan 0V untuk mode LOW (logika 0) jika dikonfigurasikan sebagai pin
output. Jika di konfigurasikan sebagai pin input, maka ke 14 pin ini dapat
menerima tegangan 5V untuk mode HIGH (logika1) dan 0V untuk mode LOW
(logika 0). Besar arus listrik yang diijinkan untuk melewati pin digital I/O adalah
40 mA. Pin digital I/O ini juga sudah dilengkapi dengan resistor pull-up sebesar
20-50 kΩ. Ke 14 pin digital I/O ini selain berfungsi sebagai pin I/O juga
mempunyai fungsi khusus yaitu :
Pin D0 dan pin D1 juga berfungsi sebagai pin TX dan RX untuk komunikasi data
serial. Kedua pin ini terhubung langsung ke pin IC FTDI USB-TTL. Pin D2 dan
pin D3 juga berfungsi sebagai pin untuk interupsi eksternal. Kedua pin ini dapat
dikonfigurasikan untuk pemicu interupsi dari sumber eksternal. Interupsi dapat
terjadi ketika timbul kenaikan atau penurunan tegangan pada pin D2 atau pin D3.
Pin D4, pin D5, pin D6, pin D9, pin D10 dan pin D11 dapat digunakan sebagai pin
PWM (pulse width modulator). Pin D10, pin D11, pin D12 dan pin D13, ke empat
pin ini dapat digunakan untuk komunikasi mode SPI. Pin D13 terhubung ke sebuah
Arduino Nano juga dilengkapi dengan 8 buah pin analog, yaitu pin A0, A1, A2, A3,
A4, A5, A6 dan A7. Pin analog ini terhubung ke ADC (analog to digital converter)
internal yang terdapat di dalam mikrokontroller. Pada kondisi awal, pin analog ini
dapat mengukur variasi tegangan dari 0V sampai 5 V pada arus searah dengan
besar arus maksimum 40 mA. Lebar range ini dapat diubah dengan memberikan
sebuah tegangan referensi dari luar melalui pin Vref. Pin analog selain dapat
digunakan untuk input data analog, juga dapat digunakan sebagai pin digital I/O,
kecuali pin A6dan A7 yang hanya dpat digunakan untuk input data analog saja.
Fungsi khusus untuk pin analog antara lain : Pin A4untuk pin SDA, pin A5 untuk
pin SCL, pin ini dapat digunakan untuk komunikasi I2C. Pin Aref digunakan
sebagai pin tegangan referensi dari luar untuk mengubah range ADC. Pin reset,
pin ini digunakan untuk mereset board Arduino Nano, yaitu dengan
menghubungkan pin ini ke ground selama beberapa milidetik. Board Arduino
Nano selain dapat direset melalui pin reset, juga dapat direset dengan
menggunakan tombol reset yang terpasang pada board Arduino Nano.
2.3.3 Komunikasi
Arduino Nano sudah dilengkapi dengan beberapa fasilitas untuk
komunikasi yang dapat digunakan untuk berkomunikasi dengan komputer (PC
atau Laptop), atau dengan board mikrokontroller lainnya. ATmega168 dan
ATmega328 dilengkapi dengan komunikasi serial UART TTL (5V), yang terdapat
pada pin D0 dan pin D1. Board juga dilengkapi dengan sebuah IC FTDI 232 Rl
yang dapat dihubungkan langsung ke komputer untuk menghasilkan sebuah
virtual com-port pada operating sistem.
Software Arduino (sketch) yang digunakan sebagai IDE Arduino juga dilengkapi
dengan serial monitor yang memungkinkan programmer untuk menampilkan data
serial sederhana yang dapat dikirim atau diterima dari board Arduino Nano. Led
RX dan TX yang terpasang pada board Arduino Nano akan berkedip jika terjadi
komunikasi data serial antara PC dengan Arduino Nano.Selain dapat
berkomunikasi dengan menggunakan data serial melalui virtual com-port,
Arduino Nano juga dilengkapi dengan mode komunikasi I2C (TWI) dan SPI
2.3.4 Pemograman
Arduino Nano dapat diprogram dengan menggunakan software Arduino
(sketch). Pada menu program, pilih tool – board kemudian pilih jenis board yang
akan diprogram. Untuk memprogram board Arduino dapat memilih tipe board
Arduino diecimila atau duemilanove atau langsung memilih Nano W/atmega168
atau Nano W/atmega328.
Arduino Nano sudah dilengkapi dengan program boatloader, sehingga
programmer dapat langsung meng-up-load kode program langsung ke board
Arduino Nano tanpa melalui board perantara atau hardware lain. Komunikasi ini
menggunakan protokol STK500 keluaran ATMEL.
Programmer juga dapat mem-up-load program ke board Arduino Nano tanpa
menggunakan boatloader, tetapi melalui ICSP (in-circuit serial programming)
header yang sudah tersedia di board Arduino Nano. Pemograman melalui ICSP
tidak akan dibahas pada buku ini.
2.4.Pemograman Arduino Nano
Arduino Nano dapat diprogram dengan menggunakan software
Arduino.Software ini bisa didapatkan secara gratis dari website resmi
Arduino.Software Arduino yang akan digunakan adalah driver dan IDE. IDE
Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java
IDE Arduino terdiri dari:
1. Editor program, sebuah window yang memungkinkan pengguna menulis
dan mengedit program dalam Bahasa processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa
Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller
tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh
microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan
dalam hal ini.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke dalam
Visual Basic adalah salah satu bahasa pemrograman komputer.Bahasa
pemrograman adalah perintah-perintah yang dimengerti oleh komputer untuk
melakukan tugas-tugas tertentu. Bahasa pemrograman Visual Basic, yang
dikembangkan oleh Microsoft sejak tahun 1991, merupakan pengembangan dari
pendahulunya yaitu bahasa pemrograman BASIC (Beginner’s All-purpose
Symbolic Instruction Code) yang dikembangkan pada era 1950-an. Visual Basic
merupakan salah satu Development Tool yaitu alat bantu untuk membuat berbagai
macam program komputer, khususnya yang menggunakan sistem
operasiWindows. Visual Basic merupakan salah satu bahasa pemrograman
komputer yang mendukung object (Object Oriented Programming = OOP).
2.5.LCD (Liquid Crystal Display)
Layar LCD merupakan suatu media penampilan data yang sangat efektif
dan efisien dalam penggunaannya.Untuk menampilkan sebuah karakter pada layar
LCD diperlukan beberapa rangkaian tambahan.Untuk lebih memudahkan para
pengguna, maka beberapa perusahaan elektronik menciptakan modul LCD.
Gambar 2.4LCD (Liquid Crystal Display)
LCD dibagi menjadi dua bagian yaitu bagian depan panel LCD yang
terdiri dari banyak dot atau titik LCD dan mikrokontroler yang menempel pada
bagian belakang panel LCD yang berfungsi untuk mengatur titik-titik LCD
sehingga dapat menampilkan huruf, angka, dan simbol khusus yang dapat terbaca.
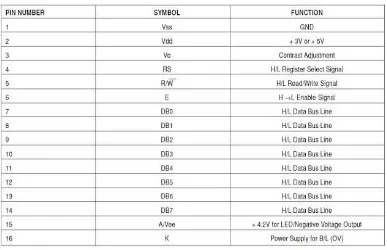
Fungsi Pin-Pin LCD
Modul LCD berukuran 16 karakter x 2 baris dengan fasilitas backlighting
daya, dengan fasilitas pin yang tersedia maka lcd 16x2 dapat digunakan secara
maksimal untuk menampilkan data yang dikeluarkan oleh mikrokontroler, secara
ringkas fungsi pin-pin pada LCD dituliskan pada Tabel 2.1.
Tabel 2.1Konfigurasi Pin LCD 16x2
Sedangkan secara umum pin-pin LCD diterangkan sebagai berikut :
1. Pin 1 dan 2 Merupakan sambungan catu daya, Vss dan Vdd. Pin Vdd
dihubungkan dengan tegangan positif catu daya, dan Vss pada 0V atau
ground. Meskipun data menentukan catu 5 Vdc (hanya pada beberapa
mA), menyediakan 6V dan 4.5V yang keduanya bekerja dengan baik,
bahkan 3V cukup untuk beberapa modul.
2. Pin 3 merupakan pin kontrol Vee, yang digunakan untuk mengatur kontras
display. Idealnya pin ini dihubungkan dengan tegangan yang bisa diubah
untuk memungkinkan pengaturan terhadap tingkatan kontras display
sesuai dengan kebutuhan, pin ini dapat dihubungkan dengan variable
resistor sebagai pengatur kontras.
3. Pin 4 merupakan Register Select (RS), masukan yang pertama dari tiga
command control input. Dengan membuat RS menjadi high, data karakter
4. Pin 5Read/Write (R/W), untuk memfungsikan sebagai perintah write maka
R/W low atau menulis karakter ke modul. R/W high untuk membaca data
karakter atau informasi status dari register-nya.
5. Pin 6Enable (E), input ini digunakan untuk transfer aktual dari
perintah-perintah atau karakter antara modul dengan hubungan data. Ketika menulis
ke display, data ditransfer hanya pada perpindahan high atau low. Tetapi
ketika membaca dari display, data akan menjadi lebih cepat tersedia
setelah perpindahan dari low ke high dan tetap tersedia hingga sinyal low
lagi.
6. Pin 7 sampai 14 adalah delapan jalur data/data bus (D0 sampai D7)
dimana data dapat ditransfer ke dan dari display.
7. Pin 16 dihubungkan kedalam tegangan 5 Volt untuk memberi tegangan
dan menghidupkan lampu latar/Back Light LCD.
2.6.Keypad
Keypad merupakan komponen elektronik yang digunakan sebagai
masukan, disususun dari beberapa tombol/switch dengan teknik matrix.
Berdasarkan penjelasan tersebut, bahwa sebenarnya keypad merupakan
tombol-tombol yang dirangkai menjadi sebuah paket dengan teknik menghubungkan satu
tombol dengan tombol yang lain dengan teknik matrix. Teknik matrix adalah bisa
dikatakan array, memiiki kolom dan baris lebih dari satu.Berikut secara ilusrasi
penghubungan tombol-tombol pada keypad.
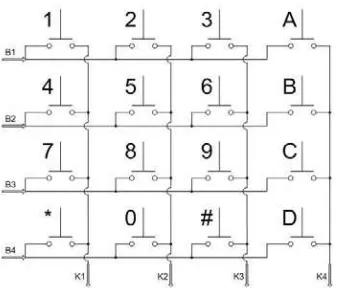
Gambar 2.5Rangkaian Mariks 4x4
Keypad Matriks adalah tombol-tombol yang disusun secara maktriks
contoh, Keypad Matriks 4x4 cukup menggunakan 8 pin untuk 16 tombol. Hal
tersebut dimungkinkan karena rangkaian tombol disusun secara horizontal
membentuk baris dan secara vertikal membentuk kolom.
Namun demikian, sebagai konsekuensi dari penggunaan bersama satu jalur
(semisal baris satu (B1)), maka tidak dimungkinkan pengecekkan dua tombol
sekaligus dalam satu slot waktu.
Proses pengecekkan dari tombol yang dirangkai secara maktriks adalah dengan
teknik scanning, yaitu proses pengecekkan yang dilakukan dengan cara
memberikan umpan data pada satu bagian dan mengecek feedback (umpan balik)
nya pada bagian yang lain.Dalam hal ini, pemberian umpan data dilakukan pada
bagian baris dan pengecekkan umpan balik pada bagian kolom.Pada saat
pemberian umpan data pada satu baris, maka baris yang lain harus dalam kondisi
inversinya. Tombol yang ditekan dapat diketahui dengan melihat asal data dan di
kolom mana data tersebut terdeteksi:
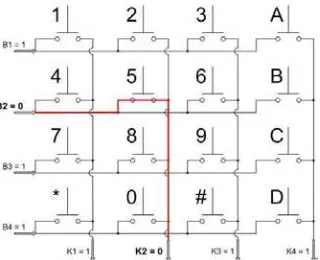
Gambar 2.6Rangkaian Umpan Balik Mariks 4x4
Pada contoh Gambar2.5.Rangkaian Umpan Balik Mariks 4x4 di atas,
tombol yang ditekan adalah tombol “5”.Seperti terlihat bahwa B2 bernilai nol,
sedangkan B1, B3, dan B4 adalah satu.Kemudian dengan mengetahui bahwa asal
data dari B2, dan umpan baliknya terdeteksi pada K2, maka dapat disimpulkan
bahwa tombol yang ditekan adalah tombol “5”.
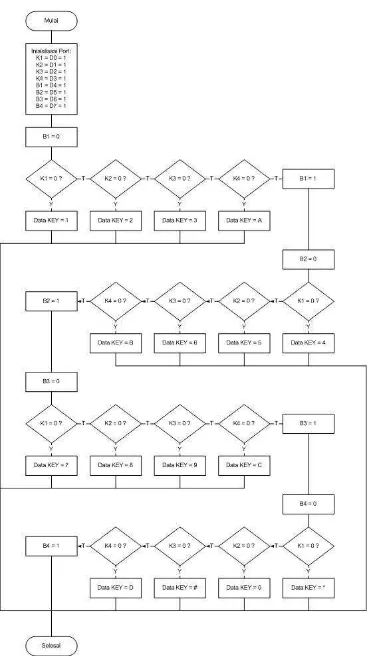
Flowhcart berikut memperlihatkan proses scanning Keypad Matriks 4×4
Gambar 2.7FlowchartMariks 4x4
2.7.Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang
dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga
dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari
poros output motor. motor servo merupakan perangkat yang terdiri dari motor
DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear
yang melekat pada poros motor DC akan memperlambat putaran poros dan
meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan
resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran
Gambar 2.8Gambar Bentuk Fisik Motor Servo
Dalam bentuk fisik motor servo terdapat komponen dalam yang dapat
dilihat dari gambar dibawah ini, yang terdiri dari output spline, drive gears, servo
case, control circuit, motor dan ppotensiometer.
Gambar 2.9Komponen Dalam Motor Servo
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk
mengontrol gerakan dan posisi akhir dari poros motor servo. Penjelasan
sederhananya begini, posisi poros output akan di sensor untuk mengetahui posisi
poros sudah tepat seperti yang di inginkan atau belum, dan jika belum, maka
kontrol input akan mengirim sinyal kendali untuk membuat posisi poros tersebut
tepat pada posisi yang diinginkan. Untuk lebih jelasnya mengenai sistem kontrol
loop tertutup, perhatikan contoh sederhana beberapa aplikasi lain dari sistem
kontrol loop tertutup, seperti penyetelan suhu pada AC, kulkas, setrika dan lain
sebagainya.
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu
juga digunakan dalam berbagai aplikasi lain seperti pada mobil mainan radio
kontrol, robot, pesawat, dan lain sebagainya.Ada dua jenis motor servo, yaitu
motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi
Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada
aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya
terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo
rotation 180⁰ dan servo rotation continuous.
• Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum
dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰
kearah kanan dan 90⁰ kearah kiri. Dan total putarannya hanya setengah
lingkaran atau 180⁰.
• Motor servo rotation continuous merupakan jenis motor servo yang
sebenarnya sama dengan jenis servo standard, hanya saja perputaran
porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke
arah kanan maupun kiri.
2.7.1. Prinsip Kerja Motor Servo
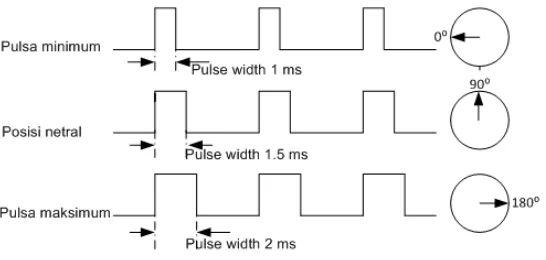
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa
(Pulse Wide Modulation/PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol
yang diberikan akan menentukan posisi sudut putaran dari poros motor servo.
Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros
motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan
berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam),
sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor
servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih
jelasnya perhatikan gambar dibawah ini.
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan
bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada
posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan
eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor
servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang
dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan
posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms
(mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan
pada posisinya.
2.8 Relay
Relay adalah saklar mekanik yang dikendalikan atau dikontrol secara
elektronik (elektro magnetik). Saklar pada relay akan terjadi perubahan posisi
OFF ke ON pada saat diberikan energi elektro magnetik pada armatur relay
tersebut. Relay pada dasarnya terdiri dari 2 bagian utama yaitu saklar mekanik dan
sistem pembangkit elektromagnetik (induktor inti besi). saklar atau kontaktor
relay dikendalikan menggunakan tegangan listrik yang diberikan ke induktor
pembangkit magnet untuk menrik armatur tuas saklar atau kontaktor relay. Relay
yang ada dipasaran terdapat berbagai bentuk dan ukuran dengan tegangan kerja
dan jumlah saklar yang berfariasi, berikut adalah salah satu bentuk relay yang ada
dipasaran. Contoh Relay Elektro Mekanik Relay dibutuhkan dalam rangkaian
elektronika sebagai eksekutor sekaligus interface antara beban dan sistem kendali
elektronik yang berbeda sistem power supplynya. Secara fisik antara saklar atau
kontaktor dengan elektromagnet relay terpisah sehingga antara beban dan sistem
kontrol terpisah. Bagian utama relay elektro mekanik adalah sebagai berikut.
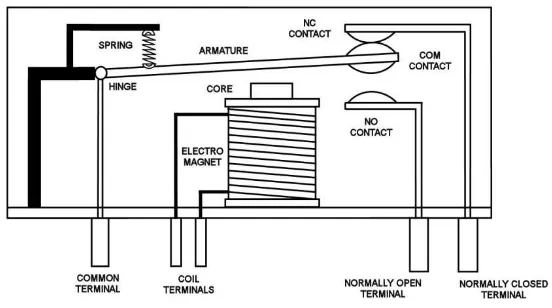
Konstruksi Relai Elektro Mekanik Posisi NC (Normally Close)
Gambar 2.11 Konstruksi Relai Elektro Mekanik Posisi NC (Normally Close)
Dari konstruksi relai elektro mekanik diatas dapat diuraikan sistem kerja
atau proses relay bekerja. Pada saat elektromagnet tidak diberikan sumber
tegangan maka tidak ada medan magnet yang menarik armature, sehingga skalar
relay tetap terhubung ke terminal NC (Normally Close) seperti terlihat pada
gambar konstruksi diatas. Kemudian pada saat elektromagnet diberikan sumber
tegangan maka terdapat medan magnet yang menarik armature, sehingga saklar
relay terhubung ke terminal NO (Normally Open) seperti terlihat pada gambar
dibawah.
Konstruksi Relai Elektro Mekanik Posisi NO (Normally Open)
Relay elektro mekanik memiliki kondisi saklar atau kontaktor dalam 3
posisi. Ketiga posisi saklar atau kontaktor relay ini akan berubah pada saat relay
mendapat tegangan sumber pada elektromagnetnya. Ketiga posisi saklar relay
tersbut adalah :
• Posisi Normally Open (NO), yaitu posisi saklar relay yang terhubung ke
terminal NO (Normally Open). Kondisi ini akan terjadi pada saat relay
mendapat tegangan sumber pada elektromagnetnya.
• Posisi Normally Colse (NC), yaitu posisi saklaar relay yang terhubung ke
terminal NC (Normally Close). Kondisi ini terjadi pada saat relay tidak
mendapat tegangan sumber pada elektromagnetnya.
• Posisi Change Over (CO), yaitu kondisi perubahan armatur sakalr relay
yang berubah dari posisi NC ke NO atau sebaliknya dari NO ke NC.
Kondisi ini terjadi saat sumber tegangan diberikan ke elektromagnet atau
saat sumber tegangan diputus dari elektromagnet relay.
Relay yang ada dipasaran terdapat bebarapa jenis sesuai dengan desain yang
ditentukan oleh produsen relay. Dilihat dari desai saklar relay maka relay
dibedakan menjadi :
• Single Pole Single Throw (SPST), relay ini memiliki 4 terminal yaitu 2
terminal untuk input kumaparan elektromagnet dan 2 terminal saklar. Relay
ini hanya memiliki posisi NO (Normally Open) saja.
• Single Pole Double Throw (SPDT), relay ini memiliki 5 terminal yaitu
terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 3 terminal
saklar. relay jenis ini memiliki 2 kondisi NO dan NC.
• Double Pole Single Throw (DPST), relay jenis ini memiliki 6 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 4 terminal
saklar untuk 2 saklar yang masing-masing saklar hanya memilki kondisi NO
• Double Pole Double Throw (DPDT), relay jenis ini memiliki 8 terminal
yang terdiri dari 2 terminal untuk kumparan elektromagnetik dan 6 terminal
untuk 2 saklar dengan 2 kondisi NC dan NO untuk masing-masing
saklarnya.
Relay dapat digunakan untuk mengontrol motor AC dengan rangkaian
kontrol DC atau beban lain dengan sumber tegangan yang berbeda antara
tegangan rangkaian kontrol dan tegangan beban. Diantara aplikasi relay yang
dapat ditemui diantaranya adalah :
Relay sebagai kontrol ON/OF beban dengan sumber tegang berbeda. Relay sebagai selektor atau pemilih hubungan.
Relay sebagai eksekutor rangkaian delay (tunda).
Relay sebagai protektor atau pemutus arus pada kondisi tertentu.
2.9 Pompa Air
Pompa adalah mesin atau peralatan mekanis yang digunakan untuk
menaikkan cairan dari dataran rendah ke dataran tinggi atau untuk
mengalirkan cairan dari daerah bertekanan rendah ke daerah yang
bertekanan tinggi dan juga sebagai penguat laju aliran pada suatu sistem
jaringan perpipaan. Hal ini dicapai dengan membuat suatu tekanan yang
rendah pada sisi masuk atau suction dan tekanan yang tinggi pada sisi
keluar atau dischargedari pompa. Pompa juga dapat digunakan pada
proses-proses yang membutuhkan tekanan hidraulik yang besar. Hal ini
bisa dijumpai antara lain pada peralatan-peralatan berat. Dalam operasi,
mesin-mesin peralatan berat membutuhkan tekanan discharge yang besar
dan tekanan isap yang rendah. Akibat tekanan yang rendah pada sisi isap
pompa maka fluida akan naik dari kedalaman tertentu, Sedangkan akibat
tekanan yang tinggi pada sisi discharge akan memaksa fluida untuk naik
sampai pada ketinggian yang diinginkan dan pada penggunaan pompa
pada saat ini adalah pompa Air Aquarium yang di gunakan untuk daerah
Pada dasarnya setiap pompa air aquarium dilengkapi dengan
peralatan otomatis ketika kita membeli mesin pompa air aquarium di toko,
ini bergunaa untuk memudahkan kita pada saat pengoperasian, sehingga
waktu kita menjadi lebih efektif dan efisien dan tidak memerlukan aktifitas
menghidupkan ataupun mematikan pompa, sebab sudah ada sensor