TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat
Memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro
i
Disusun oleh:
HADI SANJAYA
NIM : 005114061
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the
Sarjana Teknik
Degree
In Electrical Engineering
ii
By :
HADI SANJAYA
Student ID Number : 005114061
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SAINS AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
tidak beranak dan tidak diperanakkan. Dan
tidak ada satupun yang menyamai-Nya”.
(
Al Ikhlash
)
Karya ini kupersembahankan untuk :
Allah SWT dan junjungan Nabi
Muhammad SAW
(
atas berkat dan rahmat-Nya
)
Bapak Iswandi Umar & Ibu
Sumarni yang selalu memberikan
doa, kekuatan dan mendidikku
dengan penuh cinta,
Kakakku Eko Susanto &
Adik-adikku Mira Tulistiana,
Nery Indriana, terima kasih
atas dukungannya,
Almamaterku
vii
frekuensi penggal yang dapat dikendalikan secara digital dengan menggunakan
masukan kode digital. Secara umum alat ini terdiri dari bagian digital dan bagian
analog.
Bagian digital terdiri dari pengendali masukan digital dan pengali, dan bagian
analog terdiri dari filter pelewat rendah. Untuk pengendali masukan digital
menggunakan 8 saklar dan untuk pengali menggunakan DAC 0832. Jadi frekuensi
penggal pada filter ditala secara digital tergantung dari besarnya nilai dari masukan
digital. Untuk filter digunakan filter jenis tapis peubah kondisi dengan tujuan agar saat
frekuensi penggal diubah-ubah, faktor kualitasnya tetap. Proses perkalian antara
masukan digital dengan komponen pengali ‘k’ dan tegangan referensi keluaran dari
penguat beda pada rangkaian tapis peubah kondisi. Hasil perkalian merupakan masukan
untuk rangkaian integrator pada rangkaian tapis peubah kondisi. Nilai masukan digital
ditampilkan oleh LED dan frekuensi penggal diukur dengan menggunakan osiloskop.
Pada
tanggapan
magnitude
diperoleh laju kemiringan (
roll-off
) yang
mempunyai kesalahan rata-rata sebesar 4,1 % dibandingkan dengan nilai teoritis, dan
untuk pengukuraan frekuensi penggal didapatkan kesalahan rata-rata sebesar 2,36 %
dibaningkan nilai teoritis.
viii
Digitally controlled low pass filter is low pass filter that cut-off frequency of
filter could be controlled digitally using binary code digital. This appliance consist of
digital part and analog part.
Part of digital consist of digital input controller and multiplier. Part of analog
consist of low pass filter. Digital input use eight switch and multiplier component use
DAC 0832. The cut-off frequency was tuned digitally depend of digital input value. The
filter use State Variable Filter (SVF) type which so that quality factor (Q) of filter kept
constant. Multiplying operation between digital input voltage with multiplier
component called as ‘k’, and reference voltage from differensiator on state variable
filter. The output of multiplier use as input to integrator on state variable filter. The
value of digital input was displayed by LED and the cut-off frequency was measure by
osciloscope.
From the magnitude response can be analyzed the roll-off value and it has an
error about 4,1 % and for measurement of cut-off frequency has an error about 2,36 %
from theory value.
ix
karena petunjuk dan rahmat-Nya sehingga penulis dapat meyelesaikan Tugas Akhir
yang berjudul
“Filter Pelewat Rendah Terkendali Digital”
. Tugas Akhir ini disusun
sebagai salah satu syarat untuk memperoleh gelar Sarjana pada jurusan Teknik Elektro,
Fakultas Teknik Universitas Sanatha Dharma Yogyakarta.
Tersusunnya tugas akhir ini tidak terlepas dari bantuan dan dukungan dari berbagai
pihak. Pada kesempatan ini tidak lupa penulis mengucapkan terima kasih yang dalam
kepada :
1.
Bapak Martanto, S.T., M.T., selaku Dosen Pembimbing I yang telah banyak
memberikan bimbingan dan pengarahan hingga tugas akhir ini dapat tersusun.
2.
Bapak Ir. Tjendro, selaku dosen pembimbing II atas bimbingan dan bantuannya
sehingga penulis dapat menyelesaikan tugas akhir ini.
3.
Bapak Djoko Untoro, S.Si., M.T., selaku Dosen Penguji yang telah memberikan
masukan dan saran.
4.
Ibu Ir. Th. Prima Ari Setyani, M.T., selaku Dosen Penguji yang telah memberikan
masukan dan saran.
5.
Bapak Iswandi Umar dan Ibunda Sumarni yang telah memberikan kasih dan
sayangnya, doa, dorongan, semangat, biaya yang tiada henti hingga terselesaikan
studi dan penyusunan tugas akhir ini.
6.
Kakakku Eko Susanto dan Adik-adikku Mira Tulistiana, Nery Indriana atas
xi
HALAMAN JUDUL
... ..
i
HALAMAN PERSETUJUAN PEMBIMBING
... .. iii
HALAMAN PENGESAHAN
... .. iv
HALAMAN PERNYATAAN KEASLIAN KARYA
... .. v
HALAMAN PERSEMBAHAN
... .. vi
INTISARI
... ... .. vii
ABSTRACT
... ... .. viii
KATA PENGANTAR
... .. ix
DAFTAR ISI
... ... .. xi
DAFTAR TABEL
.... ... .. xiv
DAFTAR GAMBAR
... .. xiv
DAFTAR LAMPIRAN
... .. xvi
BAB
I PENDAHULUAN
... .. 1
1.1
Judul ... ..
1
1.2 Latar Belakang... ..
1
1.3
Rumusan
Masalah ... ..
2
1.4
Batasan
Masalah ... ..
2
1.5 Tujuan dan Manfaat Penelitian... ..
3
1.6
Metodologi
Penelitian ... ..
3
xii
2.1.2 Klasifikasi Filter ... .. 6
2.2
Penguat Operasional (
Operasional Amplifier, Op-Amp
) sebagai
pembangun dasar ... .. 10
2.2.1 Dasar-Dasar Penguat Operasional ... .. 10
2.2.2 Penguat
Membalik
(
Inverting Amplifier
) ... .. 11
2.2.3 Penguat
Tidak
Membalik
(
Non Inverting Amplifier
) ... .. 12
2.2.4 Pengikut Tegangan (
Voltage Follower
) ... .. 13
2.2.5 Penguat Penjumlah (
Summing Amplifier
) ... .. 14
2.2.6 Integrator ... .. 14
2.3 Filter Pelewat Rendah (
Low Pass Filter
, LPF) ... .. 16
2.4 Penapis Peubah Kondisi (
State Variable Filter
, SVF).. ... .. 17
2.5
Digital to Analog Converter
(DAC) ... .. 21
2.5.2
DAC 0832... .. 22
2.5.3 Akurasi dan Resolusi ... .. 23
2.6
Pengali
(
Multiplier
) ... .. 24
2.7 Saklar Mekanik... .. 26
2.8 Saklar Transistor... .. 27
BAB III
RANCANGAN
PENELITIAN
... ..
30
xiii
3.5 Saklar Sebagai Kendali Masukan Digital... .. 38
BAB
IV HASIL PENGAMATAN DAN PEMBAHASAN
... .. 40
4.1
Tanggapan
Magnitude
Sebagai Fungsi Frekuensi... .. 40
4.2 Penaksiran Nilai
Roll-off
pada Tanggapan
Magnitude
Sebagai
Fungsi Frekuensi ... .. 55
4.3 Hubungan Antara Input Digital dengan Frekuensi
cut-off
... .. 61
4.4 Hubungan Antara Tegangan Referensi dengan Tegangan
Keluaran Pengali ... .. 65
BAB
V KESIMPULAN DAN PENUTUP
... .. 68
5.1 Kesimpulan ... .. 68
5.2 Saran ……. ... .. 68
DAFTAR PUSTAKA
…….. ... .. 70
xiv
Tabel 4.1 Konfigurasi saklar masukan digital saat pengamatan tanggapan
magnitude
.. ... .. 41
Tabel 4.2 Tanggapan amplitudo relatif MdB (
ω
) pengamatan untuk urutan
rendah ... ... .. 42
Tabel 4.3 Tanggapan amplitudo relatif MdB (
ω
) teoritis untuk urutan rendah... .. 44
Tabel 4.4 Tanggapan amplitudo relatif MdB (
ω
) pengamatan untuk urutan
sedang ... ... .. 46
Tabel 4.5 Tanggapan amplitudo relatif MdB (
ω
) teoritis untuk urutan sedang .. .. 48
Tabel 4.6 Tanggapan amplitudo relatif MdB (
ω
) pengamatan untuk urutan
tinggi... ... .. 51
Tabel 4.7 Tanggapan amplitudo relatif MdB (
ω
) teoritis untuk urutan tinggi .... .. 53
xv
Gambar 2.2
Karakteristik ideal filter pelewat tinggi ...
8
Gambar 2.3
Karakteristik ideal filter pelewat jalur ...
9
Gambar 2.4
Karakteristik ideal filter penolak jalur...
9
Gambar 2.5
Simbol
Op-Amp
dalam rangkaian ...
10
Gambar 2.6
Comparato
r non inverting
dengan bias positif ...
11
Gambar 2.7
Comparator
inverting
dengan bias positif ...
11
Gambar 2.8
Rangkaian penguat
inverting
... 11
Gambar 2.9
Rangkaian penguat
non inverting
... 12
Gambar 2.10 Rangkaian pengikut tegangan...
13
Gambar 2.11 Rangkaian penguat penjumlah...
14
Gambar 2.12 Rangkaian integrator
Op-Amp
... 14
Gambar 2.13 Rangkaian
integrator yang menggunakan resistor untuk
meminimalkan
offset error
... 15
Gambar 2.14 Tanggapan frekuensi
Low Pass Filter Butterworth
... 17
Gambar 2.15 Blok diagram filter pelewat rendah ...
18
Gambar 2.16 Rangkaian filter pelewat rendah ...
20
Gambar 2.17 Rangkaian ternormalisasi filter pelewat rendah ...
21
Gambar 2.18 Simbol DAC 0832 ...
22
Gambar 2.19 Rangkaian
R-2R Ladder
pada DAC ...
23
xvi
Gambar 2.24 Rangkaian saklar transistor...
27
Gambar 2.25 Karakteristik keluaran transistor...
28
Gambar 2.26 Transistor sebagai saklar tertutup ...
29
Gambar 2.27 Transistor sebagai saklar terbuka ...
29
Gambar 3.1
Diagram blok filter pelewat rendah terkendali digital...
30
Gambar 3.2
Rangkaian pengikut tegangan menggunakan IC LF347...
31
Gambar 3.3
Diagram blok yang mempresentasikan persamaan (3.6)...
32
Gambar 3.4
Rangkaian filter pelewat rendah dengan pengali menggunakan
DAC... 34
Gambar 3.5
Rangkaian saklar transistor untuk menyalakan LED ...
35
Gambar 3.6
Gambar rangkaian penampil LED...
38
Gambar 3.7
Rangkaian saklar masukan digital ...
38
Gambar 3.8
Rangkaian 8 saklar masukan digital... 39
Gambar 4.1. Tanggapan
magnitude
hasil pengamatan dari urutan 1 sampai
urutan 3 ... 44
Gambar 4.2 Tanggapan
magnitude
secara teoritis dari urutan ke 1 sampai urutan
ke 3 ... 46
Gambar 4.3 Tanggapan
magnitude
hasil pengamatan untuk dari urutan ke 100
sampai urutan ke 102... 48
xvii
Gambar 4.6 Tanggapan
magnitude
secara teoritis dari urutan ke 253 sampai
urutan ke 255 ... 55
Gambar 4.7 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 1 ... 58
Gambar 4.8 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 2 ... 58
Gambar 4.9 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 3 ... 59
Gambar 4.10 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 100 ... 59
Gambar 4.11 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 101 ... 60
Gambar 4.12 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 102 ... 60
Gambar 4.13 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 253 ... 61
Gambar 4.14 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 254 ... 61
Gambar 4.15 Nilai
roll-off
tanggapan
magnitude
untuk urutan ke 255 ... 62
Gambar 4.16 Grafik hubungan antara masukan digital dengan frekuensi
cut-off
berdasarkan pengamatan dan teori ... 64
Gambar 4.17 Grafik hubungan antara masukan digital dengan galat untuk
frekuensi
cut-off
... 65
Gambar 4.18 Grafik hubungan antara masukan digital dengan tegangan referensi
dan keluaran pengali... 67
xviii
Tabel hubungan input digital dengan frekuensi
cut-off
... A
Tabel hubungan input digital dengan tegangan referensi dan tegangan output
pengali... ...
B
Gambar rangkaian keseluruhan ... C
Gambar rangkaian catu daya ... D
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Kemajuan ilmu pengetahuan dan teknologi pada saat ini telah
mempengaruhi segala bidang kehidupan manusia, termasuk dalam bidang
elektronika. Salah satu pengaruh yang ditimbulkan adalah adanya pengembangan
suatu sistem pengendalian, yaitu yang semula dilakukan secara analog kini telah
mulai dialihkan secara digital. Pengembangan tersebut dimaksudkan agar
pekerjaan yang dilakukan menjadi lebih praktis. Dalam hal ini, pengembangan
dilakukan atas suatu sistem yang lama atau hanya mengubah beberapa bagian
kecil saja.
Sistem pengendalian secara digital sebenarnya tidak jauh berbeda dengan
sistem pengendalian secara analog. Namun jika dilihat dari segi kepraktisan,
sistem pengendalian secara digital lebih praktis sebab hanya memasukkan bit-bit
data secara langsung atau tidak langsung melalui saklar yang sudah tersedia.
Dalam sistem komunikasi, filter mempunyai kegunaan yang sangat besar
sebab bertugas untuk melewatkan sinyal dengan frekuensi yang dikehendaki dan
melemahkan sinyal dengan frekuensi yang tidak diinginkan. Berdasarkan hal
tersebut, telah banyak peralatan elektronik pendukung sistem komunikasi yang
digunakan oleh manusia, seperti telefon, radio, maupun televisi, menggunakan
filter sebagai salah satu komponen. Pada penelitian ini akan dibahas mengenai
dikendalikan secara digital sehingga diperoleh frekuensi cut-off yang dapat
diubah-ubah. Pengendalian dilakukan dengan cara menambahkan pengali
(multiplier) di dalam filter yang bekerja berdasarkan kondisi masukan digital dari
8 saklar.
1.2. Rumusan Masalah
Rumusan masalah yang dihadapi adalah bagaimana merancang Filter
Pelewat Rendah menggunakan modul integrator, agar dapat diketahui posisi
pengali sebagai pengendali frekuensi cut-off. Bagaimana mengubah-ubah
frekuensi cut-off dari konfigurasi yang telah diperoleh sehingga perubahan
frekuensi tiap bit mempunyai step yang tetap dari batas minimum sampai batas
maksimum.
1.3.
Batasan Masalah
Pada penelitian ini, dilakukan batasan-batasan terhadap sistem yang akan
diteliti. Batasan yang dilakukan antara lain :
1. Dalam realisasi digunakan Penapis Peubah Kondisi (State Variable
Filter, SVF) yang berbasis pada Butterworth orde 2 serta frekuensi
yang diubah-ubah hanya frekuensi cut-off dari Low Pass Filter.
2. Step kenaikan frekuensi ditentukan sebesar 100 Hz, dimulai dari
frekuensi 100 Hz.
3. Berbasis Butterworth orde 2 (faktor kualitas (Q) sebesar 0,707).
5. Pengendalian frekuensi cut-off menggunakan Digital to Analog
Converter 8 bit.
6. Untuk penunjang yang lain digunakan saklar sebagai masukan
digital dan buffer analog.
7. Pengujian sistem dibatasi pada tanggapan frekuensi yang sekaligus
menyatakan tanggapan magnitude, sedangkan tanggapan fase tidak
diperhatikan.
1.4.
Tujuan dan Manfaat Penelitian
Tujuan yang ingin dicapai adalah dapat merancang dan membuat Filter
Pelewat Rendah menggunakan rangkaian State Variable Filter yang dikendalikan
secara digital.
Beberapa manfaat yang diharapkan dapat diperoleh dari penelitian ini
adalah sebagai berikut :
1. Tersedianya Filter Pelewat Rendah untuk menghasilkan frekuensi
cut-off yang dapat diubah-ubah.
2. Sistem pengendalian yang dilakukan secara praktis.
3. Sebagai dasar pengembangan untuk aplikasi yang lebih bervariasi.
4. Sebagai referensi yang dapat mendukung penelitian selanjutnya
1.5.
Metodologi Penelitian
Dalam penyusunan Tugas Akhir ini dilakukan beberapa metodologi
penelitian. Adapun metodologi penelitian yang dilakukan terdiri dari :
1. Studi Pustaka, yaitu dengan mengumpulkan dan mempelajari
berbagai informasi, baik dari buku, makalah maupun internet
mengenai hal-hal yang berkaitan dengan Filter Pelewat Rendah,
sehingga informasi yang diperoleh dapat digunakan sebagai
referensi pendukung dalam penyusunan laporan.
2. Merealisasikan pengetahuan yang diperoleh dalam bentuk
perancangan hardware.
3. Melakukan pengujian terhadap hasil perancangan agar dapat
diketahui hasil secara realistis.
4. Menganalisis hasil pengujian dan membandingkan dengan teori
yang ada.
5. Mengambil kesimpulan terhadap perancangan dan pengujian yang
telah dilakukan.
6.
1.6.
Sistematika Penulisan
Sistematika penulisan Tugas Akhir ini terbagi menjadi 5 bab yang disusun
sebagai berikut :
Bab ini berisi tentang latar belakang masalah, rumusan masalah,
batasan masalah, tujuan dan manfaat penelitian, metodologi penelitian
serta sistematika penulisan.
BAB II. DASAR TEORI
Bab ini berisi penjelasan-penjelasan umum serta persamaan
matematis yang berkaitan dengan filter pelewat rendah terkendali
digital.
BAB III. RANCANGAN PENELITIAN
Bab ini berisi tentang rancangan filter pelewat rendah terkendali
sigital, yang meliputi diagram blok, penjelasan cara kerja secara
singkat dan pemilihan komponen.
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN
Bab ini hasil dari penelitian dan pembahasan dari pengujian yang
telah dilakukan.
BAB V. PENUTUP
BAB II
DASAR TEORI
2.1.
Filter
2.1.1. Definisi Filter
Filter didefinisikan sebagai sebuah alat atau rangkaian atau substansi yang meneruskan atau meloloskan arus listrik pada frekuensi-frekuensi atau
jangkauan frekuensi tertentu serta menahan (menghalangi) frekuensi-frekuensi
lainnya.
2.1.2.
Klasifikasi Filter
Berdasarkan komponen pendukung, filter dapat diklasifikasikan menjadi 2 macam, yaitu : filter pasif dan filter aktif.
1. Filter Pasif
Filter pasif merupakan rangkaian filter yang hanya terdiri dari inti
filter, yaitu kombinasi resistor (R), kapasitor (C), dan induktor (L).
Kelebihan yang dimiliki yaitu : mampu memenuhi karakteristik filter yang
bagus dengan penerapan yang luas dari frekuensi audio sampai frekuensi
yang sangat tinggi, serta handal pada penerapan frekuensi yang sangat
tinggi. Sedangkan kekurangannya, yaitu : adanya masalah pada sisi
frekuensi rendah pada rentang frekuensi audio, ukuran fisik induktor yang
semakin besar untuk induktansi yang besar dan biaya untuk pengadaan
2. Filter aktif
Filter aktif merupakan suatu rangkaian filter yang terdiri dari
kombinasi resistor, kapasitor dan satu atau lebih komponen aktif, biasanya
penguat operasional dengan feedback. Kelebihan yang dimiliki yaitu :
penguat operasional mampu menyediakan penguatan atau gain. Sinyal
masukan tidak akan mengalami pelemahan (atenuasi) selama sinyal-sinyal
dengan frekuensi-frekuensi yang dikehendaki dilewatkan oleh filter. Biaya
pembuatan filter murah sebab tidak menggunakan komponen induktor yang
harganya relatif mahal dan tidak selalu tersedia di pasaran, mudah diatur
(tune) untuk jangkauan frekuensi yang lebar tanpa mempengaruhi tanggapan
rangkaian yang telah ditentukan (sesuai dengan yang diinginkan), serta
memiliki impedansi masukan yang tinggi dan keluaran yang rendah akibat
dari penggunaan penguat operasional yang juga hampir menjamin tidak
adanya interaksi antara filter dengan sumber atau beban sinyal. Sedangkan
kekuranganya, yaitu : membutuhkan catu daya sendiri, kurang handal
dibandingkan komponen pasif, perlu feedback sehingga ada kemungkinan
tidak stabil dan batasan frekuensi kerja 100 KHz (bekerja baik dibawah
frekuensi 100 KHz).
Berdasarkan jangkauan frekuensi yang dilewatkan (passband) dan jangkauan
frekuensi yang ditolak (stop band), filter dapat diklasifikasikan menjadi 4
macam, yaitu : Filter Pelewat Rendah (Low Pass Filter, LPF), Filter Pelewat
Tinggi (High Pass Filter, HPF), Filter Pelewat Jalur(Band Pass Filter, BPF) dan
1. Filter Pelewat Rendah
Filter pelewat rendah memilih frekuensi-frekuensi rendah dan menolak
frekuensi-frekuensi tinggi. Karakteristik ideal filter pelewat rendah ditunjukkan
oleh gambar 2.1.
Gambar 2.1. Karakteristik ideal filter pelewat rendah
2. Filter Pelewat Tinggi
Filter pelewat tinggi menolak frekuensi-frekuensi rendah dan
melewatkan frekuensi tinggi. Karakteristik ideal filter pelewat tinggi ditunjukkan
oleh gambar 2.2.
Gambar 2.2. Karakteristik ideal filter pelewat tinggi
3. Filter Pelewat Jalur
Filter pelewat jalur melewatkan frekuensi-frekuensi dalam pita
tertentu, sedangkan frekuensi-frekuensi diatas pita semuanya ditolak.
Gambar 2.3. Karakteristik ideal filter pelewat jalur 4. Filter Penolak Jalur
Filter penolak jalur menolak frekuensi-frekuensi dalam pita tertentu
dan melewatkan frekuensi-frekuensi diatas dan dibawah pita frekuensi tersebut.
Karakteristik ideal filter penolak jalur ditunjukkan oleh gambar 2.4.
Gambar 2.4. Karakteristik ideal filter penolak jalur
Terdapat 2 area pada filter dengan karakteristik ideal diatas, yaitu :
1. Pass Band, ditunjukkan dengan nilai 1.
2. Stop Band, ditunjukkan dengan nilai 0.
Filter aktual tidak mempunyai karakteristik ideal seperti gambar diatas, sehingga
mempunyai 3 area, yaitu :
1. Pass Band, rentang tertentu dengan penguatan.
2. Stop Band, rentang tertentu di bawah level yang ditentukan.
2.2. Penguat Operasional (Operasional Amplifier, Op-Amp)
sebagai pembangun dasar
2.2.1. Dasar-Dasar Penguat Operasional
Istilah penguat operasional atau Op-Amp awalnya dikenal dalam
bidang elektronika analog dan biasanya digunakan untuk operasi-operasi
aritmetika seperti penjumlahan, integrasi dll. Op-Amp sebenarnya merupakan
sebuah penguat tegangan DC differensial. Adapun simbol Op-Amp ditunjukkan
oleh gambar 2.5.
Gambar 2.5 Simbol Op-Amp dalam rangkaian
Karakteristik ideal yang dimiliki , yaitu : lebar pita yang tak berhingga (infinite
bandwidth), impedansi masukkan yang tak berhingga (infinite input impedance),
serta impedansi keluaran yang sama dengan nol (zero output impedance). Dari
gambar 2.5 terlihat bahwa Op-Amp memiliki dua masukkan, yaitu masukan
positif (V+) dan masukan negative (V-). Biasanya Op-Amp diberi catu daya
dengan polaritas ganda atau bipolar dalam jangkauan ± 5 Volt hingga ±15 Volt.
Seperti telah disebutkan sebelumnya Op-Amp memiliki dua masukan. Agar
status keluarannya mengindikasikan mana diantara kedua tegangan masukan
yang lebih besar, maka suatu Op-Amp dapat digunakkan sebagai komparator.
Dengan menerapkan bias DC pada masukan Op-Amp, level transisi dapat diset
dan pada terminal Op-Amp mana yang diberi bias. Comparator non inverting
dengan bias positif ditunjukkan oleh gambar 2.6.
Gambar 2.6. Comparator non inverting dengan bias positif
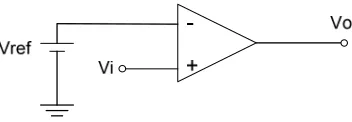
Comparator inverting dengan bias positif ditunjukkan oleh gambar 2.7.
Gambar 2.7 Comparator inverting dengan bias positif
Selanjutnya pada pembahasan-pembahasan berikutnya rangkaian Op-Amp yang
digunakan dalam filter aktif selalu berbentuk atau menggunakan umpan balik
eksternal yang berguna untuk menstabilkan karakteristik Op-Amp itu sendiri.
2.2.2. Penguat Membalik (Inverting Amplifier)
Rangkaian penguat inverting ditunjukkan pada gambar 2.8.
Gambar 2.8 Rangkaian penguat inverting
Penguatan tegangan atau perbandingan tegangan keluaran terhadap tegangan
masukan dapat dituliskan sebagai :
b a
i R
R V V
− =
0
(2.1)
Dengan demikian, penguatan tegangan bisa kurang dari 1, sama dengan 1
(unity) atau lebih dari 1. Biasanya Ra = 1 K , karena impedansi masukan
penguat inverting tersebut sama dengan Ra.
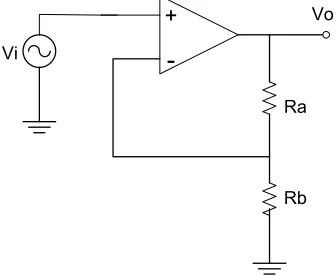
2.2.3. Penguat Tidak Membalik (Non Inverting Amplifier)
Rangkaian penguat non inverting ditunjukkan oleh gambar 2.9.
Gambar 2.9 Rangkaian penguat non inverting
Persamaan untuk menentukan penguatan tegangan adalah :
b a
i R
R V
V
+ =1
0 (2.2)
Berbeda dengan penguat inverting, pada penguat non inverting penguatan
tegangan selalu lebih besar dari 1. Perbedaan ini terlihat dari persamaan (2.1)
2.2.4. Pengikut Tegangan (Voltage Follower)
Pengikut tegangan kadang-kadang disebut penyangga atau buffer dan
memiliki fungsi yang sama dengan pengikut emitter (emitter follower). Ciri-ciri
yang dimiliki, yaitu : impedansi masukan sangat tinggi (lebih dari 100 K ) dan
impedansi keluaran yang sangat rendah (kurang dai 75 ).
Gambar 2.10 menunjukkan rangkaian pengikut tegangan.
Gambar 2.10 Rangkaian pengikut tegangan
Jika dibandingkan dengan rangkaian penguat non inverting, pada rangkaian
pengikut tegangan, Ra = ∞ dan Rb = 0. Dengan demikian penguatan tegangan
selalu 1.
0 =1
i V V
(2.3)
Sehingga dapat diketahui bahwa sinyal keluaran sama persis (identik) dengan
sinyal masukan. Fungsi utama dari dari rangkaian ini adalah sebagai penyangga
atau mengisolasi beban dari sumber.
2.2.5. Penguat Penjumlah (Summing Amplifier)
Rangkaian penguat penjumlah dapat menjumlahkan dua atau lebih
masukan-masukan bebas. Gambar 2.11 menunjukkan rangkaian untuk penguat
Gambar 2.11 Rangkaian penguat penjumlah
Penguatan tegangan untuk masing-masing masukan, yaitu :
1 1
1
R R V V
A o b
v = =− (2.6)
2 2
2
R R V V
A o b
v = =− (2.7)
Tegangan keluaran yang diperoleh :
+ −
= 2
2 1 1
V R R V R R
V b b
o (2.8)
2.2.6. Integrator
Integrator Op-Amp dibentuk dengan cara mengganti resistor umpan
balik dari rangkaian penguat inverting dengan sebuah kapasitor. Gambar 2.12
menunjukkan suatu rangkaian integrator Op-Amp.
Berdasarkan gambar diatas, sinyal masukan diintegralkan dan sekaligus
menyatakan “luasan dibawah kurva”. Tegangan keluaran yang dihasilkan,
yaitu :
=−
∫
V dtC R
V s
a o
1
(2.9)
Bentuk
C Ra
1
harus sesuai dengan masukan frekuensi minimum yang
diharapkan :
min 2
1
f C Ra
π
= (2.10)
Karena integrator juga bereaksi terhadap sembarang tegangan offset resultant
keluaran (berkaitan dengan offset arus bias Op-Amp), sebuah resistor (Ra )
sering diletakkan diantara masukan positif dengan ground untuk meminimalkan
offset ini. Gambar 2.13 menunjukkan rangkaian integrator yang menggunakan
resistor untuk meminimalkan offset error.
Gambar 2.13 Rangkaian integrator yang menggunakan resistor untuk meminimalkan offset
error
Efek offset dapat melibatkan tegangan maupun arus, dan dapat terjadi secara
tegangan offset dapat menyebabkan tegangan keluaran tidak nol untuk tegangan
masukan yang nol. Biasanya, Op-Amp itu sendiri memiliki offset yang telah
disesuaikan hingga beberapa milivolt mengacu pada masukan. Offset terjadi
pada saat arus bias masukan mengakibatkan penurunan tegangan yang melalui
hambatan masukan. Jika penurunan tegangan terjadi pada masukan (+) dan (-)
dapat dibuat sama atau identik, maka offset tersebut dapat dihilangkan.
2.3. Filter Pelewat Rendah (Low Pass Filter, LPF)
Seperti telah dijelaskan sebelumnya, LPF melewatkan
frekuensi-frekuensi rendah dan menolak frekuensi-frekuensi-frekuensi-frekuensi tinggi. Adapun fungsi alih dari
(transfer function) untuk LPF orde 2 Butterworth standar ditunjukkan oleh
persamaan berikut :
2 0 0 2 2 0 0 ω ωω + + = s Q s A
Hlp (2.11)
dengan :
ωo = frekuensi cut-off LPF
Ao = penguatan tegangan
Q = faktor kualitas
Faktor kualitas pada LPF Butterworth orde 2 adalah 0,707. Sedangkan
fungsi alih dalam keadaan tunak (steady state), H(jω) untuk LPF orde 2 dapat
dinyatakan sebagai :
Sedangkan dalam bentuk decibel :
n db
fc f M
2 10
) / ( 1
1 log
20
+
= (2.13)
atau
[
n]
db f fc
M 2
10 1 ( / )
log
10 +
−
= (2.14)
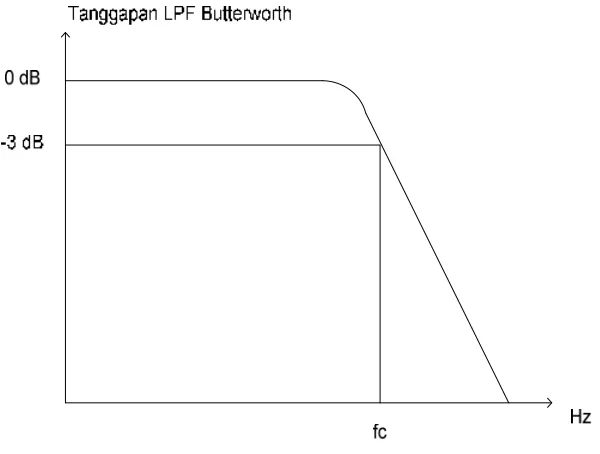
Tanggapan frekuensi Low Pass Filter Butterworth ditunjukkan oleh
gambar 2.14.
Gambar 2.14. Tanggapan frekuensi Low Pass Filter Butterworth
2.4. Penapis Peubah Kondisi (State Variable Filter, SVF)
State Variable Filter digunakan untuk implementasi Low Pass Filter
(LPF), High Pass Filter (HPF), Band Pass Filter (BPF), dan Band Rejected Filter
(BRF) dalam satu struktur yang sama. Istilah State Variable Filter berhubungan
sistematis suatu persamaan differensial dari sistem yang besar. Secara teoritis,
dapat dirancang SVF orde berapapun, tapi kebanyakan perancangan berbasis pada
orde 2. Perancangan dengan orde 2 lebih tahan terhadap variasi parameter
dibandingkan dengan perancangan menggunakan orde lebih tinggi. Orde yang
lebih tinggi dibuat dengan mengkaskade orde-orde berbasis 2, sedangkan untuk
perancangan dengan orde ganjil diperlukan filter dengan orde ganjil.
Untuk mengimplementasikan filter pelewat jalur dalam bentuk SVF,
digunakan persaman fungsi alih filter pelewat rendah orde 2 standar, yaitu seperti
diperlihatkan pada persamaan (2.11). Persamaan tersebut dapat diubah menjadi
sebagai berikut :
2 0 0 2
2 0 0
ω ωω +
+ =
s Q s
A V
V
i lp
(2.15)
Dari persamaan (2.19), dilakukan sintesis sehingga menjadi rangkaian yang
dibentuk dari rangkaian modul integrator. Ada 3 tahapan matematis dasar yang
diperlukan untuk mengimplementasikan persamaan fungsi alih ini, yaitu :
• Perkalian silang (cross multiplying), yaitu perkalian antara sinyal keluaran
dengan penyebut dan antara sinyal masukan sengan pembilang dari fungsi
alih filter pelewat rendah.
• Melakukan pembagian hasil tahap pertama dengan variabel s yang memiliki
pangkat terbesar.
• Menyusun kembali persamaan hasil tahap kedua untuk mendapatkan
pernyataan sinyal keluaran.
(
2)
2 2 o o i o olp s V A
Q s
V ω ω = ω
+ + (2.16) = +
+ 022
2 2 0 0 1 s A V s sQ
Vlp ω ω i oω (2.17)
2 0 0
2
0 1
− − = s V s Q V s A V
Vlp i o ω lp ω lp ω (2.18)
− − + − − = s V V Q s A V s
Vlp ω0 i o ω0 1 lp lp ω0 (2.19)
[
]
+ − − −= i o lp lp
lp V Q V A V s s
V ω0 ω0 1 (2.20)
Persamaan (2.24) menyatakan persamaan untuk sebuah jaringan dengan
menggunakan modul integrator, komponen (ωo/s) menunjukkan suatu modul
integrator dalam filter. Untuk memperoleh realisasi yang paling sederhana,
persamaan (2.24) dapat disusun menjadi :
[
]
− − − − −= lp i o lp
lp V Q A V V s s
V ω0 ω0 1 (2.21)
Diagram blok yang mempresentasikan persamaan (2.21) ditunjukkan pada gambar
2.15. s o ω − s o ω − Q 1
Σ
Σ
oA
Jika gambar 2.16 dihubungkan ke modul integrator dan penguat beda, maka
rangkaian filter pelewat rendah ditunjukkan oleh gambar 2.16.
Gambar 2.16 Rangkaian filter pelewat rendah
Karena ini adalah LPF Butterworth orde 2, maka faktor kualitas untuk LPF ini
adalah sebesar 0,707 yang didapat dari 1/α, dimana α adalah faktor redaman
untuk Low Pass Filter Butterworth sebesar 1,414.
Jika dilihat dari rangkaian filter pelewat rendah pada gambar 2.17, maka
dapat diperoleh faktor penguatan filter pelewat rendah dari feedback Vlp menuju
masukan non inverting penguat beda, sebagai berikut :
+
+ =
' '
' 1
4 3
4
3 4
R R
R R
R
Ao (2.22)
Agar diperoleh penguatan sebesar 1 maka nilai R3=R4=R3’=R4’ dan untuk
memperoleh faktor kualitas sebesar Q = 0,707 maka nilai R6’ dibuat sebesar 1/Q
R2 danC1, C2 yang identik. Nilai R1 dan R2 dibuat bernilai sama. Nilai C1 danC2
diperoleh berdasarkan persamaan :
RC fo
π
2 1
= (2.23)
Berdasarkan hal diatas, maka rangkaian ternormalisasi, filter pelewat rendah
ditunjukkan oleh gambar 2.17.
Gambar 2.17. Rangkaian ternormalisasi filter pelewat rendah
2.5
Digital to Analog Converter
(DAC)
Konversi digital to analog merupakan proses pengubahan kode digital
menjadi keluaran analog yang berupa arus atau tegangan. Sedangkan rangkaian
yang digunakan untuk mengkonversi disebut Digital to Analog Converter.
2.5.1. Kode Digital
Suatu kode digital dapat dikembangkan sebagai D yang terdiri dari n
merupakan Least Significant Bit (LSB). Jika diubah ke dalam bentuk desimal,
nilai aktual dari D dapat diekspresikan sebagai berikut :
D=bn-12n-1 + ... +b222+ b121 + b020
Sebagai contoh, tabel 2.1 memperlihatkan masukan biner 8 bit serta ekuivalen
dalam bentuk desimal.
Tabel 2.1 Masukan biner dan ekuivalen dalam desimal
Masukan Biner
MSB LSB
Ekuivalen Desimal
D
1 1 1 1 1 1 1 1 256
1 0 0 0 0 0 0 0 128
0 0 0 1 0 0 0 0 16
0 0 0 0 0 0 1 0 2
0 0 0 0 0 0 0 0 0
2.5.2. DAC 0832
DAC 0832 merupakan conveter 8 bit yang dapat mengubah masukan
biner menjadi keluaran yang berupa arus. Simbol DAC 0832 ditunjukkan oleh
gambar 2.18.
Gambar 2.18 Simbol DAC 0832
Nilai arus diperoleh berdasarkan R-2R Ladder yang ditunjukkan oleh gambar
Gambar 2.19 Rangkaian R-2R Ladder pada DAC
Berdasarkan gambar diatas, nilai arus keluaran yang diperoleh, yaitu :
256 )
( 10
1
ut digitalinp R
V I
fb ref
out = × (2.24)
dan
256 ) (
255 10
2
ut digitalinp R
V I
fb ref out
− ×
= (2.25)
Masukan digital terdiri dari 8 bit kode biner yang mempunyai rentang 0 sampai
255 jika diekuivalenkan dalam bilangan desimal. Sedangkan Vref adalah
tegangan referensi dan Rfb merupakan hambatan dalam.
2.5.3 Akurasi dan Resolusi
Pengubahan sinyal digital ke sinyal analog memerlukan 2 hal penting
yang saling berkaitan, yaitu akurasi/ketelitian dan resolusi. Akurasi adalah
seberapa dekat nilai keluaran sebenarnya dari pengubah digital ke analog
terhadap nilai keluaran secara teoritis. Semakin kecil presentase ketelitian, maka
semakin dekat dengan nilai secara teoritis. Sedangkan resolusi adalah
pertambahan terkecil pada tegangan yang diamati. Pertambahan terkecil pada
(LSB). Pada DAC 0832, masukan yang dimiliki terdiri dari 8 bit sehingga
mempunyai 28 atau 256 step. Jika keluaran maksimum dibagi dengan banyaknya
step maka setiap kenaikan atau penurunan per bit mengalami perubahan yang
tetap.
2.6. Pengali (Multiplier)
Untuk menghasilkan tegangan keluaran yang merupakan fungsi
perkalian antara suatu konstanta (kode kendali digital) dengan tegangan masukan,
maka sebagai pengali digunakan pengali yang menggunakan DAC. Simbol
pengali ditunjukkan oleh gambar 2.20.
Gambar 2.20 Simbol pengali
Jika k menyatakan konstanta, maka persamaan pada keluaran pengali dapat
dituliskan sebagai :
Vout =k.Vin (2.26)
DAC yang digunakan pada pengali adalah DAC 0832 sebab berdasarkan
datasheet, DAC jenis ini sangat cocok diaplikasikan untuk mengendalikan
frekuensi cut-off Filter Pelewat Rendah yang terdiri dari modul integrator. Jika
hambatan dalam (Rfb) dari DAC ini tidak dihubungkan atau dalam arti diabaikan,
dari DAC dapat diubah menjadi tegangan, maka Iout1 dan Iout2 dihubungkan ke
sebuah Op-Amp, yaitu Iout1 dihubungkan ke terminal negatif (-) sedangkan Iout2
dihubungkan ke terminal positif (+) dan digroundkan, sedangkan Rfb dihubungkan
ke keluaran Op-Amp. Untuk lebih jelas, gambar 2.21 memperlihatkan DAC
dihubungkan ke sebuah Op-Amp sehingga menghasilkan tegangan keluaran.
Gambar 2.21 DAC yang dihubungkan ke sebuah Op-Amp
Vin pada gambar 2.21 merupakan suatu tegangan referensi (Vref) dari DAC dan Rfb
merupakan hambatan dalam, yang mempunyai nilai nominal sebesar 15 K .
Tegangan keluaran dari Op-Amp dapat dirumuskan sebagai berikut :
fb out out I R
V =− . (2.27)
Disamping itu, agar DAC 0832 dapat berfungsi sebagai pengali, maka
perlu diperhatikan pin-pin yang berfungsi sebagai control signal, yaitu pin CS
diberi logika 0, pin ILE diberi logika 1, pin WR1 dan WR2 diberi logika 0,serta
pin XFER diberi logika 0. Jika persamaan (2.24) dimasukkan ke persamaan
(2.27), maka diperoleh :
in
out V
ut Digitalinp V
256 )
( 10
−
Agar tegangan keluaran (Vout) yang dihasilkan mempunyai polaritas positif, maka
Vout dihubungkan ke sebuah penguat inverting. Rangkaian pengali menggunakan
DAC ditunjukkan oleh gambar 2.22.
Gambar 2.22 Rangkaian pengali menggunakan DAC
Berdasarkan datasheet, nilai R yang digunakan 10 K .
Vout yang diperoleh, yaitu :
1 256
)
( 10
− × −
= in
out V
ut Digitalinp V
Sehingga :
in
out V
ut Digitalinp V
256 )
( 10
= (2.29)
Jika persamaan (2.29) dibandingkan dengan persamaan (2.26), maka :
256 ) (Digitalinput 10
k = (2.30)
2.7. Saklar Mekanik
Saklar merupakan suatu komponen yang berfungsi untuk menghubungkan
ini dibahas mengenai saklar mekanik yang digunakan sebagai masukan ke
rangkaian. Rangkaian saklar mekanik ditunjukkan oleh gambar 2.23.
R R
SW SPST 1 2
VCC
SW SPST 1 2 VCC
Gambar 2.23 Rangkaian saklar mekanik
Berdasarkan gambar 2.23 logika rendah dihasilkan jika saklar ditekan, sedangkan
jika saklar tidak ditekan maka akan menghasilkan logika tinggi.
2.8. Saklar Transistor
Rangkaian saklar transistor ditunjukkan oleh gambar 2.24.
3
2
1
RC
VBB
VCC
RB IC
Gambar 2.24 Rangkaian saklar transistor
Gambar 2.25 Karakteristik keluaran transistor
Transistor berada dalam kadaan saturasi/jenuh saat IB = IB0. Pada keadaan
ini, beda potensial antara kolektor dan emitter (Vce) adalah sangat kecil, yaitu
sama dengan Vce(sat), sedangkan arus kolektor IC yang mengalir hampir sama
dengan Vcc dan IC tidak mengalami perubahan. Nilai Vcc = Vce(sat) dan nilai IC =
Vcc/Rc. Hal inilah yang disebut dengan keadaan saturasi sebab nilai IC dan Vce
tidak berubah walaupun arus basis bertambah besar.
Nilai arus basis tergantung dari tegangan VBB dan hambatan Rb yang
dihubungkan seri dengan basis. Arus basis IB diperoleh berdasarkan persamaan :
b be BB B
R V V
I = − (2.31)
Jika arus basis lebih dari 0 atau semakin besar maka transistor menjadi on
sehingga dapat berfungsi sebagai saklar penutup. Transistor sebagai saklar
VCC VCC
RC
RB
VBB
3
2
1
IC
IB>0
RC
Gambar 2.26 Transistor sebagai saklar tertutup
Sedangkan jika arus basis sama dengan 0, maka dapat dikatakan transistor bekerja
di daerah cut-off sehingga transistor menjadi off dan berfungsi sebagai saklar
terbuka. Transistor sebagai saklar terbuka ditunjukkan oleh gambar 2.27.
3
2
1
RC
VCC
VBB
VCC
IB=0
RB
IC RC
BAB III
RANCANGAN PENELITIAN
3.1 Diagram Blok Filter Pelewat Rendah Terkendali Digital
Untuk membentuk suatu filter pelewat rendah terkendali digital,
diperlukan beberapa rangkaian pendukung sehingga memungkinkan diperoleh
keluaran yang diinginkan sesuai dengan kondisi masukan, baik berasal dari
masukan filter maupun dari pengendali. Diagram blok filter pelewat rendah
terkendali digital ditunjukkan oleh gambar 3.1 :
Gambar 3.1 Diagram blok filter pelewat rendah terkendali digital
Berdasarkan gambar 3.1, buffer analog digunakan untuk menghasilkan
sinyal masukan ke filter maupun ke pengali. Delapan saklar pada control unit
berfungsi untuk mengontrol masukan digital ke pengali. Tegangan keluaran dari
Pelewat Rendah dapat diubah-ubah. Pengali berfungsi untuk menghasilkan
tegangan keluaran sebagai fungsi perkalian antara suatu konstanta dengan
tegangan masukan.
3.2. Buffer Analog
Sebagai buffer analog, digunakan rangkaian pengikut tegangan. Dengan
adanya pengikut tegangan, maka tegangan keluaran yang dihasilkan untuk
dihubungkan ke masukan filter pelewat rendah, mengikuti/menyamai tegangan
sumber/masukan dalam hal besarnya maupun tundanya. Rangkaian pengikut
tegangan menggunakan IC LF347 ditunjukkan oleh gambar 3.2.
Gambar 3.2 Rangkaian pengikut tegangan menggunakan IC LF347
3.3. Filter Pelewat Rendah Terkendali Digital
Filter pelewat rendah dapat dikendalikan secara digital untuk
memperoleh frekuensi cut-off yang berubah-ubah. Mengacu pada persamaan
(2.19), realisasi dilakukan dengan memodifikasi fungsi alih filter pelewat rendah
dengan frekuensi cut-off semula (ωo). Pernyataan ini ditunjukkan oleh persamaan
(3.6) :
( )
2 0 02
2 0
0( )
ω ω ω k s Q k s k A V V i lp + + = (3.6)
Diagram blok untuk mengimplementasikan persamaan diatas adalah :
s o ω − s o ω − Q 1
Σ
Σ
oA
Gambar 3.3 Diagram blok yang mempresentasikan persamaan (3.6)
Berdasarkan gambar 3.3, untuk memperoleh perubahan frekuensi cut-off,
rangkaian pengali dihubungkan sebelum integrator pada rangkaian filter. Karena
dikendalikan secara digital, maka pada pengali ditambahkan komponen yang
dapat mengubah sinyal digital menjadi sinyal analog, yaitu Digital to Analog
Converter (DAC). Frekuensi cut-off filter pelewat rendah dapat ditala secara
digital tergantung pada besar nilai konstanta k yang merupakan kode kendali
digital, dengan nilai k tergantung dari bit-bit masukan. Modul integrator
mempunyai karakteristik transfer sebesar –k ωo/s. Frekuensi cut-off yang baru
adalah sebesar ωo’= k. ωo. Semakin besar nilai bit yang dimasukkan ke pengali,
Pada perancangan ini, jangkauan frekuensi cut-off yang digunakan mulai
dari frekuensi 100 Hz dengan step 100. Untuk memperoleh nilai frekuensi cut-off
yang berubah-ubah, besaran-besaran yang perlu ditentukan adalah sebagai berikut:
a. Frekuensi cut-off yang baru, fo’ pada setiap masukan digital tertentu. Dalam
hal ini fo’ ditentukan pada nilai minimum saat masukan digital dari DAC yang
juga bernilai minimum.
b. Faktor kualitas, Q = 0,707 (Butterworth orde 2).
c. Penguatan tegangan, A =1.
Komponen yang menentukan konstanta integrasi dari suatu integrator adalah
resistor dan kapasitor. Jika R1 = R2 dan C1 = C2, serta mengacu pada point a, yaitu
dengan menguraikan ωo’ min= kmin. ωo min, diperoleh persamaan sebagai berikut :
1 1 10 min 1 256 ) ( ' 2 C R ut Digitalinp fo = π Sehingga : 1 1 10 min 2 1 256 ) ( ' C R ut Digitalinp fo π
= (3.8)
Penentuan perolehan nilai komponen untuk mendapatkan frekuensi
cut-off pada jangkauan frekuensi yang sesuai dengan perancangan. Nilai R1 yang
digunakan = 15 K , masukan digital = 1 dan fo’min = 100 Hz. Dengan
menggunakan persamaan (3.8) diperoleh nilai C1 dan C2 sebesar :
100 . 15 . 2 . 256 1 2 1 K C C π = = = = 2 1 C
Nilai 414 pF diperoleh dengan mempararel kapasitor standar, yaitu 390 pF, 10 pF
dan 4 pF (390 pF + 10 pF + 4 pF = 414 pF). Karena nilai R1 = R2 =15 K , maka
nilai R3, R4, R3’, R4’,R5, R6, dan R5’ juga menjadi 15 K . Pada komponen
ternormalisasi, penguatan sebesar 1 diperoleh jika R4, R3, R3’ dan R4’ bernilai
sama sehingga pada perhitungan persamaan (2.22) maka akan didapatkan
penguatan sebesar 1. Untuk memperoleh faktor kualitas sebesar 0,707, maka nilai
R6’ = 28,28 K Nilai yang digunakan R6 adalah 21,21 K yang diperoleh dengan
menghubungkan resistor 10 K , 5,6 K dan 5,6 K secara seri. Agar dapat
bekerja dengan baik jika diaplikasikan dengan DAC, Op-Amp yang digunakan LF
347. Untai filter pelewat rendah dengan pengali menggunakan DAC untuk
memperoleh frekuensi cut-off pada jangkauan frekuensi tertentu ditunjukkan oleh
gambar 3.4.
3.4. Penampil LED
Rangkaian penampil sangat penting untuk memvisualisasikan dan untuk
mengetahui data-data yang dimasukan ke rangkaian DAC. Agar dapat diketahui
masukan digital ke DAC, sebagai penampil digunakan rangkaian penampil LED.
LED akan menyala cukup terang bila dialiri arus sebesar 10 mA sampai
20 mA. Bila dialiri arus yang lebih besar lagi, maka LED akan menyala lebih
terang. Arus maksimal yang diperbolehkan adalah antara 25 mA sampai 100 mA,
yang tergantung dari tipe dan warna LED. Untuk dapat mengetahui kondisi LED,
digunakan saklar transistor. Kondisi transistor (aktif atau tidak aktif) sangat
dipengaruhi oleh arus IB dan besarnya arus IB tergantung dari Vcc yang
dihubungkan dari saklar. Gambar 3.5 menunjukkan rangkaian saklar transistor
untuk menyalakan LED.
LED VCC
VCC DARI SAKLAR
RB
Q
3
2
1
RC
Gambar 3.5 Rangkaian saklar transistor untuk menyalakan LED
VCC dari saklar adalah sebesar 5 V dan VCC adalah sebesar 5 V. Sedangkan
transistor yang digunakan mempunyai penguatan arus (β) yang besar, yaitu
keadaan jenuh/saturasi maka berdasarkan data sheet, dipilih nilai IC sebesar 20
mA. Nilai Rc diperoleh berdasarkan persamaan :
Vcc =Ic
(
Rc +Rd)
+Vd +Vce(sat)d
C sat ce d cc
c R
I V V V
R = − − ( ) −
Vd adalah tegangan potong (cut-in voltage) LED yang mempunyai nilai sekitar 2
V, sedangkan Rd adalah hambatan ekuivalen dc. Karena nilai Rd dan VCE(sat)
sangat kecil, sehingga dapat diabaikan, maka diperoleh :
C d cc c
I V V
R = −
mA V V
20 2
5 −
=
Rc =150Ω
Nilai Rc standar yang dipilih juga bernilai 150 .
Transistor yang digunakan berfungsi sebagai saklar tertutup saat
masukan digital saklar ON dan saklar terbuka saat masukan digital saklar OFF.
Saat masukan digital saklar ON (logika tinggi), maka kolektor terhubung ke
emitter sehingga arus akan mengalir dari Vcc ke ground dan LED menjadi
menyala. Sedangkan saat masukan digital saklar OFF (logika rendah), maka
kolektor menjadi terbuka terhadap emitter sehingga arus dari Vcc tidak dapat
mengalir ke ground dan LED menjadi padam.
Transistor yang digunakan berfungsi sebagai saklar tertutup saat VOH
dan saklar terbuka saat VOL. Saat VOH (logika tinggi), maka kolektor terhubung ke
menyala. Sedangkan saat VOL (logika rendah), maka kolektor menjadi terbuka
terhadap emitter sehingga arus dari Vcc tidak dapat mengalir ke ground dan LED
menjadi padam. Berdasarkan data sheet, β yang dipilih adalah sebesar 350. β
dapat digunakan untuk mendapatkan nilai IB0, yaitu berdasarkan persamaan :
β ) ( 0 sat C B I I = Sehingga : A mA
IB 57,14µ
350 20
0 = =
IB0 merupakan besaran arus yang menyebabkan transistor menjadi saturasi. Besar
IB yang digunakan untuk mengaktifkan transistor dipilih sebesar 10.IB0, yaitu
0,5714 mA. Agar diperoleh nilai IB yang diinginkan, maka diperlukan hambatan
Rb, yang didapat dari persamaan :
B be OH b I V V
R = −
VOH ditentukan sebesar 4,3 V dan Vbe transistor jenis silikon adalah sebesar 0,7
V, sehingga :
Ω = − = K mA V V
Rb 7,08
5714 , 0 7 , 0 75 , 4
Nilai Rb standar yang dipilih adalah 6,8 K .
Masukan digital dari saklar kendali
Gambar 3.6 Gambar rangkaian penampil LED
3.5. Saklar Sebagai Kendali Masukan Digital
Sebagai masukan digital berupa binary code 8 bit digunakan delapan
saklar yang dihubungkan dengan Vcc 5 Volt. Saklar yang digunakan adalah switch
SPDT.
Pada rangkaian yang ditunjukkan pada gambar 3.7, pada saat saklar terhubung
pada pin 1 pada saklar SPDT, maka akan menghasilkan logika rendah (VOL)
karena Vcc akan terhubung dengan ground dan pada saat saklar terhubung pada
pin 3 pada saklar SPDT maka menghasilkan logika tinggi (VOH) pada masukan
digital karena VCC akan langsung memberikan masukan tegangan pada masukan
digital.
Karena VOH ditentukan sebesar 4,75 V dan IB pada rangkaian penampil
LED yaitu sebesar 0,571 mA maka nilai R1 diperoleh melalui perhitungan :
1
R CC
B V V
V = −
V V
VR1=5 −4,75
V VR1=0.25
Maka nilai R1 :
mA V R 571 , 0 25 , 0 1 = Ω =437.52 1
R
Nilai R1 yang digunakan sebesar 450 .
Rangkaian delapan saklar masukan digital ditunjukkan oleh gambar 3.8.
SW1 2 1 3 R4 450 D6 D1 D7 SW5 2 1 3 R1 450 D0 D3 SW4 2 1 3 SW8 2 1 3 5 V R6
450 R8450
d i g i t a l i n p u t SW2 2 1 3 R5 450 D2 SW7 2 1 3 D4
ke penampil LED
R7 450 R3 450 SW3 2 1 3 SW6 2 1 3 R2 450 D5
BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan ditunjukkan hasil pengamatan dan pembahasan dari
Filter Pelewat Rendah Terkendali Digital. Pengujian dilakukan dengan cara
memberikan masukan frekuensi pada masukan blok filter yang berupa gelombang
sinus dari AFG (Audio Function Generator) serta masukan pengendali frekuensi
berupa bit digital yang berasal dari saklar. Jumlah saklar untuk kendali masukan
digital ada 8 saklar, yaitu saklar1 (LSB), saklar2, saklar3, saklar4, saklar5, saklar6,
saklar7 dan saklar8 (MSB). Untuk penampil nilai bit masukan digital, digunakan
LED yang jumlahnya ada 8 LED. Pada saat saklarn tidak terhubung ke ground ,
maka nilai bit masukan digital akan ditampilkan dengan LED ke n yang menyala
sebagai bit 1 dan saat saklarn terhubung ke ground, maka nilai bit masukan digital
akan ditampilkan dengan LED ke n yang tidak menyala sebagai bit 0. Tegangan
dan frekuensi yang dihasilkan pada keluaran filter digunakan sebagai acuan dalam
membuat grafik tanggapan magnitude.
4.1.
Tanggapan Magnitude Sebagai Fungsi Frekuensi
Sub bab ini bertujuan untuk menunjukkan tanggapan magnitude dari
keluaran filter pelewat rendah. Jumlah masukan digital ada 255 masukan digital,
sehingga jumlah filter pelewat rendah ada 255 dimana frekuensi cut-off nya
terkendali oleh masukan digital. Berdasarkan jumlah filter pelewat rendah, maka
cut-off nya urut berdasarkan masukan digital dari nilai yang terkecil (urutan ke 1
(fc=100 Hz)) sampai masukan digital yang terbesar (urutan ke 255 (fc 25,5 KHz)).
Untuk pengamatan diambil beberapa percobaan, yaitu percobaan pada urutan
rendah (urutan ke 1 (fc = 100Hz), urutan ke 2 (fc = 200Hz) dan urutan ke 3 (fc =
300 Hz)), urutan sedang (urutan ke 100 (fc = 10 KHz), urutan ke 101 (fc = 10,1
KHz) dan urutan ke 102 (fc = 10,2 KHz)) dan urutan tinggi (urutan ke 253 (fc =
25,3 KHz), urutan ke 254 (fc = 25,4 KHz) dan urutan ke 255 (fc = 25,5 KHz))
sesuai dengan nilai masukan digital yang dimasukkan ke rangkaian pengali.
Pengaturan saklar untuk masukan digital pada percobaan dapat ditunjukkan oleh
tabel 4.1.
Tabel 4.1Konfigurasi saklar masukan digital saat pengamatan tanggapan magnitude
Masukan Digital
(MSB) (LSB) Urutan
S8 S7 S6 S5 S4 S3 S2 S1
ke 1 0 0 0 0 0 0 0 1
ke 2 0 0 0 0 0 0 1 0
Urutan
Rendah
ke 3 0 0 0 0 0 0 1 1
ke 100 0 1 1 0 0 1 0 0
ke 101 0 1 1 0 0 1 0 1
Urutan
Sedang
ke 102 0 1 1 0 0 1 1 0
ke 253 1 1 1 1 1 1 0 1
ke 254 1 1 1 1 1 1 1 0
Urutan
Tinggi
Untuk memperoleh grafik tanggapan magnitude, penguatan amplitudo
hasil pengamatan dihitung dengan menggunakan persamaan (4.1) :
I O dB
V V
M (ω)=20log10 (4.1)
Sedangkan secara teoritis, penguatan amplitudo dihitung berdasarkan persamaan
(2.13). Dari tanggapan magnitude tersebut, dapat ditunjukkan frekuensi cut-off
yang berubah dari nilai masukan digital yang rendah ke nilai masukan digital yang
lebih tinggi. Jika hasil pengamatan tegangan (Vpp) keluaran dan tegangan
masukan (Vpp) untuk frekuensi tertentu pada percobaan pada urutan rendah
(urutan ke 1 (fc = 100Hz), urutan ke 2 (fc = 200Hz) dan urutan ke 3 (fc = 300
Hz)), urutan sedang (urutan ke 100 (fc = 10 KHz), urutan ke 101 (fc = 10,1 KHz)
dan urutan ke 102 (fc = 10,2 KHz)) dan urutan tinggi (urutan ke 253 (fc = 25,3
KHz), urutan ke 254 (fc = 25,4 KHz) dan urutan ke 255 (fc = 25,5 KHz))
dimasukkan ke persamaan (4.1) maka diperoleh tanggapan amplitudo relatif MdB
(ω) yang terdapat pada tabel 4.2, 4.3, 4.4, dan untuk tanggapan amplitudo relatif
MdB (ω) secara teoritis nilai frekuensi hasil pengamatan dan nilai frekuensi cut-off
dimasukkan ke persamaan (2.13).
Tanggapan amplitudo relatif MdB (ω) hasil pengamatan untuk urutan
rendah dapat ditunjukkan oleh tabel 4.2.
Tabel 4.2 Tanggapan amplitudo relatif MdB (ω) pengamatan untuk urutan rendah
Tanggapan Amplitudo (dB) Frekuensi
(Hz) urutan ke 1
(fc =100 Hz)
urutan ke 2 (fc =200 Hz)
urutan ke 3 (fc =300 Hz)
10 -0,211 -0,211 -0,211
40 -0,069 0 0
Tanggapan Amplitudo (dB) Frekuensi
(Hz) urutan ke 1
(fc =100 Hz)
urutan ke 2 (fc =200 Hz)
urutan ke 3 (fc =300 Hz)
80,2 -1,432 0,069 0,069
85,1 -1,597 0 0,137
90,7 -2,475 0 0,069
95,2 -2,853 -0,211 0
100,4 -3,248 -0,211 0
105 -3,876 -0,354 0
110,3 -4,321 -0,5 0
120,6 -5,288 -0,649 -0,211
130,5 -6,375 -0,953 -0,211
140,4 -7,618 -1,269 -0,354
150,3 -8,313 -1,597 -0,5
160,2 -9,268 -1,938 -0,649
170,5 -10,116 -2,383 -0,8
180,6 -10,812 -2,662 -0,8
190,5 -11,835 -3,147 -0,953
200,4 -12,995 -3,248 -1,11
210,5 -13,638 -4,096 -1,269
220,4 -13,979 -4,553 -1,432
240,2 -15,089 -5,547 -1,938
260,2 -16,832 -6,375 -2,568
281,7 -17,855 -7,618 -2,757
290,3 -18,416 -8,313 -3,048
295 -18,861 -8,496 -3,248
300 -19,172 -8,873 -3,556
310,3 -9,168 -3,985
320 -9,473 -4,321
340,2 -10,116 -4,913
360,2 -10,812 -5,547
380,2 -11,835 -6,231
400,5 -12,69 -7,13
440,5 -14,333 -8,313
481,5 -15,493 -9,682
500,2 -15,917 -10,342
550,4 -17,855 -11,835
600,4 -19,015 -12,995
650,7 -20,354 -14,333
700 -15,089
Berdasarkan data hasil pengamatan untuk urutan rendah pada tabel 4.2, dapat
Gambar 4.1 menunjukkan tanggapan magnitude hasil pengamatan urutan rendah
(dari urutan 1sampai urutan 3).
-21 -18 -15 -12 -9 -6 -3 0 3
10 100 1000
Frekuensi (Hz) P e n g u a ta n A m p li tu d o ( d B )
fc = 100 Hz fc = 200 Hz fc = 300 Hz
Gambar 4.1. Tanggapan magnitude hasil pengamatan dari urutan 1 sampai urutan 3
Berdasarkan tanggapan magnitude hasil pengamatan pada gambar 4.1 terlihat
bahwa frekuensi cut-off adalah sebesar 95 Hz saat urutan ke 1, sebesar 187,5 Hz
saat urutan ke 2 dan 280,4 Hz saat urutan ke 3.
Tanggapan amplitudo relatif MdB (ω) secara teoritis untuk urutan rendah dapat
ditunjukkan oleh tabel 4.3.
Tabel 4.3 Tanggapan amplitudo relatif MdB (ω) teoritis untuk urutan rendah
Tanggapan Amplitudo (dB) Frekuensi
(Hz) urutan ke 1
(fc =100 Hz)
urutan ke 2 (fc =200 Hz)
urutan ke 3 (fc =300 Hz)
10 0 0 0
40 -0,109 -0,006 -0,001
60,2 -0,535 -0,035 -0,007
80,2 -1,503 -0,11 -0,022
Tanggapan Amplitudo (dB) Frekuensi
(Hz) urutan ke 1
(fc =100 Hz)
urutan ke 2 (fc =200 Hz)
urutan ke 3 (fc =300 Hz)
90,7 -2,244 -0,179 -0,036
95,2 -2,604 -0,217 -0,043
100,4 -3,045 -0,267 -0,054
105 -3,454 -0,317 -0,064
110,3 -3,944 -0,384 -0,078
120,6 -4,935 -0,539 -0,111
130,5 -5,91 -0,723 -0,152
140,4 -6,889 -0,944 -0,203
150,3 -7,855 -1,202 -0,265
160,2 -8,8 -1,497 -0,339
170,5 -9,754 -1,841 -0,43
180,6 -10,658 -2,213 -0,535
190,5 -11,513 -2,608 -0,654
200,4 -12,337 -3,027 -0,788
210,5 -13,145 -3,477 -0,942
220,4 -13,908 -3,935 -1,11
240,2 -15,351 -4,886 -1,495
260,2 -16,706 -5,871 -1,947
281,7 -18,059 -6,933 -2,497
290,3 -18,574 -7,355 -2,734
295 -18,849 -7,584 -2,866
300 -19,138 -7,826 -3,01
310,3 -8,321 -3,313
320 -8,781 -3,606
340,2 -9,718 -4,238
360,2 -10,614 -4,882
380,2 -11,479 -5,538
400,5 -12,324 -6,207
440,5 -13,897 -7,519
481,5 -15,39 -8,828
500,2 -16,034 -9,409
550,4 -17,654 -10,909
600,4 -19,149 -12,315
650,7 -20,532 -13,642
700 -14,863
Berdasarkan tabel 4.3, dapat dibuat grafik tanggapan magnitude untuk urutan
rendah untuk hasil secara teoritis. Gambar 4.2 menunjukkan tanggapan magnitude
-21 -18 -15 -12 -9 -6 -3 0
10 100 1000
Frekuens i (Hz)
P en g u at an A m p li tu d o ( d B )
fc = 100 Hz fc = 200 Hz fc = 300 Hz
Gambar 4.2 Tanggapan magnitude secara teoritis dari urutan ke 1 sampai urutan ke 3
Secara teoritis, untuk urutan ke 1 frekuensi cut-off adalah sebesar 100 Hz, sebesar
200 Hz saat urutan ke 2 dan sebesar 300 saat urutan ke 3. Berdasarkan data hasil
pengamatan pada tabel 4.2 dan data secara teoritis pada tabel 4.3, dapat diketahui
bahwa ada perbedaan nilai frekuensi cut-off pengamatan dan nilai secara teoritis.
Adapun besarnya kesalahannya adalah sebagai berikut :
1) untuk urutan ke 1 (fc = 100 Hz)
% 5 % 100 Hz 100 Hz 95 -Hz 100 = ×
2) untuk urutan ke 2 (fc = 200 Hz)
% 25 , 6 % 100 Hz 200 Hz 187,5 -Hz 200 = ×
3) untuk urutan ke 3 (fc = 300 Hz)
% 53 , 6 % 100 Hz 300 Hz 280,4 -Hz 300 = ×
Tanggapan amplitudo relatif MdB (ω) hasil pengamatan untuk urutan sedang