8 2.1 Sejarah dan Per kembangan Robot
Istilah robot berasal dari Czech, robota, yang berarti bekerja. Istilah ini diperkenalkan pertama kali oleh Karel Capek pada tahun 1921. Pada awalnya, robot diciptakan untuk membantu tugas manusia dan hiburan, lalu berkembang lebih jauh misalnya di industri perakitan kendaraan. Robot adalah peralatan eletro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan yang otonomi maupun gerakan berdasarkan gerakan yang diperintahkan.
Seiring dengan berkembangnya teknologi nirkabel (wireless), salah satunya adalah teknologi GSM (Global System for Mobile Communications), yang semakin murah dan dengan kapasitas jangkauan yang semakin luas, menyebabkan pemakaian telepon seluler tidak hanya berada pada salah satu golongan masyarakat tertentu saja (kaum elit), namun pemakai telepon seluler sudah menjangkau semua lapisan SMS (Short Message Service) adalah salah satu fasilitas yang terdapat pada telepon seluler yang hampir setiap orang mengenalnya. Telepon seluler dengan fasilitas SMS yang mampu bertukar informasi berbasis teks secara jarakjauh (remote) dan tanpa kabel (wireless) dapat memberikan solusi yang tepat terhadap masalah pengontrolan keamanan secara jarak jauh. Ditambah dengan dukungan teknologi mikrokontroler yang memungkinkan dibentuknya sebuah sistem komputer yang memiliki efisiensi daya dan tempat, menjadikan telepon seluler sebagai sarana alternatif selain sebagai sarana komunikasi juga dapat dijadikan sebagai sarana pengendali jarak jauh.
2.1.1 Karakteristik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut :
1. Sensing : Robot dapat mendeteksi lingkungan sekitarnya (halangan, panas, suara, dan image).
2. Mampu Bergerak : Robot umumnya bergerak dengan menggunakan kaki atau roda, dan pada beberapa kasus robot dapat terbang dan berenang. 3. Cerdas : Robot memiliki kecerdasan buatan agar dapat memutuskan aksi
Robot manipulator biasanya dicirikan dengan memiliki lengan (arm robot). Robot ini biasanya diterapkan pada dunia industri, seperti pada industri otomotif, elektronik dan komputer. Sedangkan robot mobil mengarah ke robot yang bergerak, meskipun nantinya robot ini juga memiliki manipulator.[4]
2.2 Pengertian dan Kegunaan GPS (Global Position System)
GPS adalah singkatan dari Global Positioning System yang merupakan sistem untuk menentukan posisi dan navigasi secara global dengan menggunakan satelit. Sistem yang pertama kali dikembangkan oleh Departemen Pertahanan Amerika ini digunakan untuk kepentingan militer maupun sipil (survei dan pemetaan).
Sistem GPS, yang nama aslinya adalah NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Positioning System), mempunyai tiga segmen yaitu : satelit, pengontrol, dan penerima / pengguna. Satelit GPS yang mengorbit bumi, dengan orbit dan kedudukan yang tetap (koordinatnya pasti), seluruhnya berjumlah 24 buah dimana 21 buah aktip bekerja dan 3 buah sisanya adalah cadangan.
1. Satelit
2. Pengontrol
bertugas untuk mengendalikan dan mengontrol satelit dari bumi baik untuk mengecek kesehatan satelit, penentuan dan prediksi orbit dan waktu, sinkronisasi waktu antar satelit, dan mengirim data ke satelit.
3. Penerima
bertugas menerima data dari satelit dan meprosesnya untuk menentukan posisi (posisi tiga dimensi yaitu koordinat di bumi plus ketinggian), arah, jarak dan waktu yang diperlukan oleh pengguna. Ada dua macam tipe penerima yaitu tipe NAVIGASI dan tipe GEODETIC. Yang termasuk receiver tipe NAVIGASI antara lain : Trimble Ensign, Trimble Pathfinder, Garmin, Sony dan lain sebagainya. Sedangkan tipe GEODETIC antara lain : Topcon, Leica, Astech, Trimble seri 4000 dan lain-lain.
Pada tugas akhir ini GPS yang digunakan adalah PMB-648 yang memiliki kinerja yang cukup tangguh dan dirancang untuk berbagai aplikasi. Konsumsi daya PMB-648 ini adalah rendah jadi sangat cocok untuk digunakan dalam sistem tugas akhir ini. Dukungan TTL dan RS232 memungkinkan integrasi diberbagai platform. Dibawah ini adalah gambar dari PMB-648.
Dari Gambar 2.1 dapat dilihat bahwa ukuran GPS ini adalah sangat kecil sehingga memudahkan dalam peletakannya
Cara Kerja GPS Receiver
Setiap satelit GPS memancarkan sinyal-sinyal gelombang mikro. GPS receiver menggunakan sinyal satelit yang diterima untuk melakukan triangulasi posisi dengan cara mengukur lama perjalanan waktu sinyal dikirimkan dari satelit, kemudian mengalikannya dengan kecepatan cahaya untuk menentukan secara tepat berapa jauh dirinya dari satelit.
Dengan mengunci minumum 3 sinyal dari satelit yang berbeda, maka GPS receiver dapat menghitung posisi tetap sebuah titik yaitu koordinat posisi lintang dan bujur (Latitude & Longitude). Penguncian sinyal satelit yang ke-4 membuat pesawat penerima GPS dapat menghitung posisi ketinggian titik tersebut terhadap muka laut (Altitude).
2.2.1 Penentuan Posisi dengan GPS
Secara garis besar penentuan posisi dengan GPS ini dibagi menjadi dua metode yaitu metode absolute dan metode relatif
1. Metode absolute atau juga dikenal sebagai point positioning, menentukan posisi hanya berdasarkan pada 1 pesawat penerima (receiver) saja. Ketelitian posisi dalam beberapa meter (tidak berketelitian tinggi) dan umumnya hanya diperuntukkan bagi keperluan NAVIGASI.
2. Metode relative atau sering disebut differential positioning, menetukan posisi dengan menggunakan lebih dari sebuah receiver. Satu GPS dipasang pada lokasi tertentu dimuka bumi dan secara terus menerus menerima sinyal dari satelit dalam jangka waktu tertentu dijadikan sebagai referensi bagi yang lainnya. Metode ini menghasilkan posisi berketelitian tinggi (umumnya kurang dari 1 meter) dan diaplikasikan untuk keperluan survey GEODESI ataupun pemetaan yang memerlukan ketelitian tinggi.
Beberapa kesalahan dalam penentuan posisi dengan metode absolut ini antara lain disebabkan oleh : efek multipath, efek selective availability (SA), maupun kesalahan karena ketidaksinkronan antara peta kerja dan setting yang dilakukan saat menggunakan GPS.
pengamatan dekat benda reflektif, pakai satelit yang benar-benar baik saja, lakukan pengukuran berulang-ulang dan dirata-rata hasilnya.
2. SA adalah teknik pemfilteran yang diaplikasikan untuk memproteksi ketelitian tinggi GPS bagi khalayak umum dengan cara mengacak sinyal-sinyal dari satelit terutama yang berhubungan dengan informasi waktu. Koreksinya hanya dapat dilakukan oleh pihak yang berwenang mengelola GPS ataupun pihak militer Amerika saja. Pihak-pihak lain yang mempunyai ijin untuk menggunakan data berketelitian tinggi biasanya juga diberi tahu cara koreksinya. SA ini merupakan sumber kesalahan paling besar bagi penentuan posisi dengan metode absolut. Namun dengan menerapkan metode relatif (differential positioning) kesalahan tersebut dapat dikurangi. Selain itu belum lama ini pihak militer Amerika telah merevisi kebijakan dalam menerapkan SA ini sehingga saat ini dengan metode absolut-pun ketelitiannya sudah sangat baik dibanding sebelumnya (sudah tidak dalam puluhan meter lagi kesalahannya). Ketidak akuratan posisi karena setting receiver yang tidak pas ini hanya dapat diatasi dengan menge-set parameter GPS saat dipakai sesuai dengan parameter peta kerja yang dipergunakan. Hal tersebut biasanya terkait dengan sistem proyeksi dan koordinat, serta datum yang digunakan dalam peta kerja.
2.2.2 Sekilas Tentang Sistem Koordinat
koordinat yang dipakai oleh GPS maupun dalam pemetaan yaitu : sistem koordinat global yang biasa disebut sebagai koordinat GEOGRAFI dan sistem koordinat di dalam bidang proyeksi. Koordinat GEOGRAFI diukur dalam lintang dan bujur dalam besaran derajad desimal, derajad menit desimal, atau derajad menit detik. Lintang diukur terhadap equator sebagai titik NOL (0° sampai 90° positif kearah utara dan 0° sampai 90° negatif kearah selatan). Bujur diukur berdasarkan titik NOL di Greenwich 0° sampai 180° kearah timur dan 0° sampai 180° kearah barat. Koordinat di dalam bidang proyeksi merupakan koordinat yang dipakai pada sistem proyeksi tertentu. Umumnya berkait erat dengan system proyeksinya, walaupun adakalanya (karena itu memungkinkan) digunakan koordinat GEOGRAFI dalam bidang proyeksi. Beberapa sistem proyeksi yang lazim digunakan di Indonesia di antaranya adalah : proyeksi Merkator, Transverse Merkator, Universal Tranverse Merkator (UTM), Kerucut Konformal. Masing-masing sistem tersebut ada kelebihan dan kekurangan, dan pemilihan proyeksi umumnya didasarkan pada tujuan peta yang akan dibuat. Dari beberapa sistem proyeksi tersebut, proyeksi Tranverse Merkator dan proyeksi Universal Tranverse Merkator-lah yang banyak dipakai di Indonesia..[11]
2.2.3 Standar NMEA
(longitude), ketinggian (altitude), waktu sekarang standar UTC (UTC time), dan kecepatan (speed over ground).
National Marine Electronics Assosiation membuat kesamaan standar antarmuka data digital. Beberapa ketentuan umum standar NMEA tersebut adalah:
1. Informasi NMEA dikirimkan oleh vendor dalam bentuk sentences dengan panjang maksimal 80 karakter.
2. Sentences NMEA berformat:
“$<vendor><massage><parameters><checksum><CR><LF>”. 3. Kombinasi <vendor><massage> disebut address field
4. Kode vendor untuk GPS adalah “GP”
Terdapat banyak format sentences NMEA untuk GPS yang masing-masing mengandung data yang berbeda-beda dan sentences yang digunakan tergantung pada data yang dibutuhkan dari GPS tersebut. Jenis kalimat NMEA adalah sebagai berikut :
Tabel 2.1 Kalimat NMEA Kalimat Deskr ipsi
$GPGGA Global positioning system fixed data $GPGLL Geographic position - latitude / longitude $GPGSA GNSS DOP and active satellites
$GPGSV GNSS satellites in view
$GPRMC Recommended minimum specific GNSS data $GPVTG Course over ground and ground speed
Dibawah ini adalah contoh kalimat Standar NMEA.
$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F
Dari kalimat diatas dapat kita ketahui setelah proses pemecahan seperti yang dijelaskan pada table berikut.
Tabel 2.2 Tabel hasil pencacahan dari kalimat standar NMEA
Field Contoh isi Deskr ipsi Sentence ID $GPGGA
UTC Time 092204.999 hhmmss.sss Latitude 4250.5589 ddmm.mmmm
Satellites Used 04 Satellites being used (0-12) HDOP 24.4 Horizontal dilution of precision
Altitude 19.7 Altitude in meters according to WGS-84 ellipsoid Altitude Units M M = Meters
Geoid Seperation
Geoid seperation in meters according to WGS-84 ellipsoid
2.3 SMS (Short Message Service)
SMS (Short Message Service) adalah kemampuan untuk mengirim dan menerima pesan dalam bentuk teks dari dan kepada ponsel. Teks tersebut bias terdiri dari kata-kata atau nomor atau kombinasi alphanumeric. SMS diciptakan sebagai standar pesan (message) oleh ETSI (Europesan Telecommunication Standards Institute), yang juga membuat standar GSM yang diimplementasikan oleh semua operator GSM. SMS yang pertama dikirimkan pada Desember 1992 dari PC ke sebuah ponsel melalui jaringan GSM Vodafone di UK. Setiap Pesan maksimal terdiri dari 160 karakter jika menggunakan alphabet Latin, dan 70 karakter jika menggunakan alphabet non-Latin seperti huruf Arab atau China.
Short Message Service atau biasa disingkat SMS merupakan sebuah layanan yang banyak diaplikasikan pada sistem komunikasi tanpa kabel (wireless), memungkinkan dilakukannya pengiriman pesan dalam bentuk alphanumeric antara terminal pelanggan atau antar teminal pelanggan dengan sistem eksternal, seperti e-mail, paging, voice mail, dan lain-lain. Aplikasi SMS merupakan aplikasi yang paling banyak peminat dan penggunanya. Hal ini dapat dibuktikan dengan munculnya berbagai jenis aplikasi yang memanfaatkan fasilitas SMS.
dikirimkan segera setelah nomor tujuan aktif kembali. Pesan juga akan terkirim ke tujuan walaupun nomor tujuan sedang melakukan pembicaraan (sibuk).
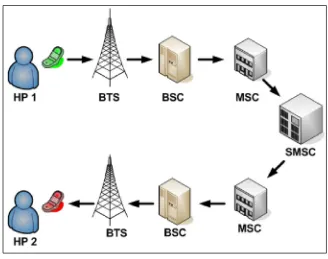
Pada gambar berikut akan dijelaskan tentang bagaimana system cara kerja sms mulai dari pengiriman sms sampai dengan sms diterima oleh si penerima dan juga bagaimana sebuah sms terpending saat handphone dari si penerima mati saat sms dikirim oleh si pengirim. Berikut adalah gambar cara kerja sms beserta penjelsannya secara lebih detail
Gambar 2.2 Cara kerja sms Cara kerja SMS :
sampai ke MSC. MSC kemudian mem-forward lagi SMS ke SMSC untuk disimpan. SMSC kemudian mengecek (lewat HLR - Home Location Register) untuk mengetahui apakah handphone tujuan sedang aktif dan dimanakah handphone tujuan tersebut.
Jika handphone sedang tidak aktif maka pesan tetap disimpan di SMSC itu sendiri, menunggu MSC memberitahukan bahwa handphone sudah aktif kembali untuk kemudian SMS dikirim dengan batas maksimum waktu tunggu yaitu validity period dari pesan SMS itu sendiri. Jika handphone tujuan aktif maka pesan disampaikan MSC lewat jaringan yang sedang meng-handle penerima (BSC dan BTS).
2.3.1 PDU (Protocol Data Unit) SMS
Dalam proses pengiriman atau penerimaan pesan pendek (SMS), data yang dikirim maupun diterima oleh stasiun bergerak menggunakan salah satu dari 2 mode yang ada, yaitu: mode teks, atau mode PDU (Protocol Data Unit) (Wavecom, 2000).
Semua informasi yang terdapat dalam PDU, dituliskan dalam bentuk pasangan-pasangan bilangan heksadesimal yang disebut dengan pasangan oktet.
Jenis PDU SMS yang akan digunakan adalah: SMS-Penerimaan (SMS-DELIVER) dan SMS-Pengiriman (SMS-SUBMIT).
1. PDU Penerimaan (SMS-Deliver)
SMS Penerimaan (SMS-Deliver) adalah pesan yang diterima oleh terminal dari SMSC dalam bentuk
PDU. PDU SMS-Penerimaan memiliki format seperti pada Gambar. Pada PDU ini, terdapat beberapa meta-informasi yang dibawa, antara lain:
1. SCA (Service Centre Address), Berisi informasi SMS-center. 2. Tipe PDU (PDU Type),
Berisi informasi jenis dari PDU tersebut 3. OA (Originating Address)
Berisi informasi nomor pengirim. 4. PID (Protocol Identifier)
Berisi informasi Identifikasi Protokol yang digunakan. 5. DCS (Data Coding Scheme)
Berisi informasi skema pengkodean data yang digunakan. 6. SCTS (Service Center Time Stamp)
Berisi informasi panjang dari data yang dibawa. 8. UD (User Data)
9. Berisi informasi data-data utama yang dibawa.
Gambar 2.3 PDU Penerimaan
2. PDU Pengiriman (SMS-Submit)
PDU Pengiriman memiliki informasi-informasi yang sama dengan PDU Penerimaan, sementara yang berbeda adalah berupa informasi : 1. MR (Message Reference),
Parameter yang mengindikasikan nomor referensi SMS-Pengiriman. 2. DA (Destination Address),
Berisi informasi nomor alamat yang dituju. 3. VP (Validity Period),
Berisi informasi jangka waktu validitas pesan pada jaringan.
2.4 Modem Wavecomm
Wavecom adalah pabrikkan asal Perancis (bermarkas di kota Issy-les-Moulineaux, Perancis) yaitu Wavecom.SA yang berdiri sejak 1993 bermula sebagai biro konsultan teknologi dan sistim jaringan nirkabel GSM, dan pada 1996 Wavecom mulai membuat desain daripada modul wireless GSM pertamanya dan diresmikan pada 1997, bentuk modul GSM pertama berbasis GSM dan pengkodean khusus yang disebut AT-command. Sulit mencari referensi module tipe apa yang pertama dibuat oleh Wavecom SA, namun bisa disarikan beberapa module yang familiar di telinga pengguna wavecom Indonesia antara lain:
1) Wismo 2C2 atau dikenal juga pembaharunya Wismo Quik Q2303A yang belum mendukung GPRS (masih murni GSM).
2) Wismo Quik Q2403A, mendukung GPRS dan format AT command yang telah berstandar ETSi GSM.
3) Wismo Quik Q2406A.
4) Wismo Quik Q2406B (untuk Eropa tersedia versi uji-coba dengan dukungan Open AT OS).
5) Wismo Quik Q24plus, telah mendukung penerapan fungsi Open AT OS (kedua di module Wavecom yang mendukung Open AT).
sebutan Wavecom Fastrack. adapun Tipe-tipe dari modem Wavecom Fastrack antara lain adalah:
1) Wavecom Fastrack WMOD (didalam dibenamkan module wismo 2C2) 2) Wavecom Fastrack WMOD2 (didalamnya dibenamkan module wismo
Q2303A)
3) Wavecom Fastrack WMOD3 (didalamnya dibenamkan module wismo Q2303B GPRS)
4) Wavecom Fastrack M1203A (prototipe dari modem Fastrack bermodule wismo Q2403A tanpa fungsi voice dan fax)
5) Wavecom Fastrack M1203B (jenis massal dari modem Fastrack yang dipasarkan di Asia Pasifik dengan dukungan module wismo Q2403A dan telah mendukung fasilitas voice/fax)
6) Wavecom Fastrack M1206A (jenis prototipe dengan module wismo Q2403A dan telah mendukung TCP/IP stacked dan sarat teknologi telekomunikasi termutahir kala itu)
7) Wavecom Fastrack M1206B (jenis produksi masal paling sukses dengan dilengkapi module Q2406A dan pada seri terakhir juga telah di revisi menjadi module wismo Q2406B dengan dukungan voice/fax/mms/tcpip) 8) Wavecom Fastrack M1306A (jenis pertama dengan revisi ukuran casing
9) Wavecom Fastrack M1306B (jenis produksi massal yang paling laris sepanjang masa, dengan dukungan module Q2406B (open AT) – dan Q24plus classic dengan dukungan penuh terhadap Open AT dan TCPIP) 10)Wavecom Fastrack Supreme 10/20 (module menggunakan wismo Q2686
dan Q2687 – mendukung penuh fungsi Open AT dan Open IESM port) 11)Wavecom Fastrack GO (wismo Q2687 dan merupakan modem terkecil
pertama buatan Wavecom)
12)Wavecom Fastrack XTEND (varian terbaru menggantikan Fastrack Supreme 10 yang telah mendukung EDGE/HSPA).
Mulai dirilisnya Wavecom Fastrack Supreme 10/20, Wavecom ternyata sudah berganti pemilik, yaitu Sierra wireless bermarkas di Canada. dan pada januari 2010 seluruh kepentingan Wavecom diakuisisi penuh ke Sierra Wireless ini termasuk penggantian nama Fastrack menjadi FXT dan tipe-tipe baru yang sebenarnya masih ber-platform sama dengan pendahulunya.
Modem Wavecom (copy model) produksi RRC Semenjak 2006 lalu, sudah lalu lalang produksi tiruan daripada modem Wavecom Fastrack yang dibuat di Negeri China. Mayoritas dirakit atau diproduksi di Propinsi Guangdong, tepatnya kota Shenzhen, distrik industri TI terbesar di China setelah Hongkong. Adapun beberapa tipe Wavecom Fastrack yang diproduksi secara massal di RRC antara lain adalah:
2) Wavecom Fastrack M1306B (bermodule Wismo Quik Q2403A/Q2406A/Q2406B/Q24plus/Q2438F cdma)
3) Wavecom Fastrack Supreme 20 (bermodule Wismo Quik Q2686 – fasilitas slot IESM port tidak bisa digunakan)
Modem diatas memang dibuat dalam bentuk tiruannya, dengan tetap menggunakan module asli Wavecom Wismo Quik namun dibangun di dalam PCB baru yang murni di cetak dengan atau tanpa ijin pengawasan Wavecom,SA. Artinya bisa disebut Asli tapi Palsu. Dengan fungsi dan kegunaan yang sama dengan aslinya, modem Fastrack buatan RRC ini cukup menggiurkan karena harga yang murah dan kualitas yang tidak kalah dengan rakitan aslinya. Ditambah lagi dengan kemudahan dalam perawatan dan suku cadang. apabila modem aslinya mampu diajak bekerja hingga usia 3-4 tahun, pada modem buatan RRC ini usia bisa hanya sampai 6 atau 1 tahun masa penggunaan aktif tanpa dimatikan, dengan harga yang selisih jauh dengan aslinya, kondisi masa pakai ini tidak terlalu di pusingkan oleh para pengguna selama fungsi daripada modemnya masih sama.
Modem Wavecom Fastrack ini di Indonesia cukup dikenal digunakan pada industri bisnis rumahan dan bahkan skala besar – mulai dari fungsi untuk kirim SMS massal hingga fungsi sebagai penggerak perangkat elektronik. Beberapa fungsi kegunaan modem ini di masyarakat adalah antara lain:
4) SMS auto-reply
AT-Command adalah perintah yang dapat diberikan kepada handphone atau GSM/CDMA modem untuk melakukan sesuatu hal, termasuk untuk mengirim dan menerima SMS. Dengan memprogram pemberian perintah ini di dalam komputer/mikrokontroler maka perangkat kita dapat melakukan pengirima atau penerimaan SMS secara otomatis untuk mencapai tujuan tertentu. Komputer ataupun mikrokontroler dapat memberikan perintah AT-Command melalui hubungan kabel data serial ataupun bluetooth.
dokumentasi teknis dari produsen pembuat handphone atau GSM/CDMA modem tersebut.
Berikut beberapa contoh perintah AT-Command yang digunakan. 1. Perintah Kirim SMS (AT+CMGS=x)
dimana x adalah jumlah pasang karakter data PDU yang ingin dikirimkan. Dalam data PDU nanti akan tersimpan nomor tujuan pengiriman dan pesan SMS yang ingin dikirimkan. Handphone atau GSM/CDMA modem kemudian akan merespon untuk mempersilakan memasukkan data PDU yang harus diakhiri dengan karakter CTR-Z. 2. Perintah Terima SMS (AT+CMGR=x)
dimana x adalah nomor index SMS yang ingin dibaca dalam memori tempat penyimpanan (SIMcard atau handphone/modem). Handphone atau GSM/CDMA modem akan merespon dengan memberikan data PDU dari SMS yang diinginkan, dimana di dalamnya memuat nomor pengirim, waktu kirim, dan pesan SMS yang dikirim. PDU ini kemudian dapat diterjemahkan oleh komputer/mikrokontroler sehingga didapatkan informasi yang ingin diketahui.[8]
2.6 Relay
Terutama di perangkat yang bersifat elektronis atau otomatis. Contoh di Televisi, Radio, Lampu otomatis dan lain-lain.
Cara kerja komponen ini dimulai pada saat mengalirnya arus listrik melalui koil,lalu membuat medan magnet sekitarnya sehingga dapat merubah posisi saklar yang ada di dalam relay terserbut, sehingga menghasilkan arus listrik yang lebih besar. Disinilah keutamaan komponen sederhana ini yaitu dengan bentuknya yang minimal bisa menghasilkan arus yang lebih besar.
Pemakaian relay dalam perangkat-perangkat elektronika mempunyai Keuntungan yaitu ;
1) Dapat mengontrol sendiri arus serta tegangan listrik yang diinginkan 2) Dapat memaksimalkan besarnya tegangan listrik hingga mencapai batas
maksimalnya
3) Dapat menggunakan baik saklar maupun koil lebih dari satu, disesuaikan dengan kebutuhan
Dalam praktek sederhana yang biasa dilakukan oleh elektronikawan pada awalnya adalah menggunakan relay ini untuk menghidupkan KIPAS ANGIN saat suhu di suatu ruangan lebih dari 30 derajad misalnya. Sistem kerja dari relay disini adalah, menerima instruksi dari IC atau transistor sensor suhu (LM 355 misalnya) dan secara otomatis, saklar akan dialiri oleh arus listrik, dan menggerakkan saklar yang ada di relay tersebut.[7]
2.7 RS 232 MAX
Standar komunikasi serial untuk komputer ialah RS-232, RS-232 mempunyai standar tegangan yang berbeda dengan serial port mikrokontroler, sehingga agar sesuai dengan RS-232 maka di butuhkan suatu rangkaian level converter, IC yang digunakan bermacam-macam, tetapi yang paling mudah dan sering digunakan ialah IC MAX232/HIN232.
Komunikasi serial merupakan hal yang penting dalam sistem embedded, karena dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler dengan devais lainnya. Port serial pada mikrokontroller terdiri atas dua pin yaitu RXD dan TXD, RXD berfungsi untuk menerima data dari komputer/perangkat lainnya, TXD berfungsi untuk mengirim data ke komputer/perangkat lainnya.[10]
Gambar 2.6 RS-232 max
2.8 ATmega 8535
kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan populer.Ada beberapa vendor yang membuat mikrokontroler diantaranya Intel, Microchip, Winbond, Atmel, Philips, Xemics dan lain-lain.Dari beberapa vendor tersebut, yang paling populer digunakan adalah mikrokontroler buatan Atmel.
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada perangkat elektronika. Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan terutama dalam pengontrolan robot. Seiring perkembangan elektronika mikrokontroler dibuat semakin kompak dengan bahasa pemrograman yang juga ikut berubah. Salah satunya adalah mikrokontroler AVR (Alf and Vegard’s Risc processor) ATmega8535 yang menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi satu instruksi program. Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
Kapabilitas detail dari ATMega 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dan memiliki kecepatan maksimal 16 Mhz.
2. Kapasitas memori flash 8 KB, SRAM sebesar 512 byte dan EEPROM (Electrically Eraseble Programable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fasilitas 10 bit sebanyak 8 chanel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2.5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik
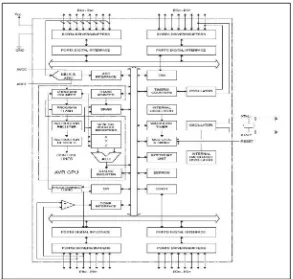
Dari Gambar 2.7 dapat dilihat Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D. 2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 7. Port antarmuka SPI
8. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 9. Antarmuka komparator analog.
10.Port USART untuk komunikasi serial.
11.Sistem mikroprosesor 8bit berbasis RISC dengan kecepatan maksimal 16MHz
2.8.1 Kontruksi ATmega 8535
Mikrokontroler ATmega8535 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
1. Memori program
memiliki lebar data 16 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program aplikasi.
2. Memori data
ATmega8535 memiliki kapasitas memori data sebesar 608 byte yang terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Address, register EEPROM Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses data dari SRAM.
ATmega8535 memiliki 3 modul timer yang terdiri dari 2 buah timer/counter 8 bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi. Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial syncrhronous kecepatan tinggi yang dimiliki oleh ATmega8535. Universal Syncrhronous and Asyncrhronous Serial Receiver and Transmitter (USART) juga merupakan salah satu mode komunikasi serial yang dimiliki oleh ATmega8535. USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.
2.8.2 Konfigurasi Pin ATMega8535
Gambar 2.8 Konfigurasi Pin ATMega8535
Dari Gambar 2.8 dapat dijelaskan secara fungsional konfigurasi pin pada ATMega 8535 sebagai berikut
1. VCC merupakan Pin yang berfungsi sebagai pin masukan catudaya 2. GND merupakan Pin Ground
3. Port A (PA0...PA7) merupakan pin I/O dan pin masukan ADC
4. Port B (PB0...PB7) merupakan pin I/O dan pin yang mempunyai fungsi khusus yaitu Timer/Counter, komparator Analog dan SPI
5. Port C (PC0...PC7) merupakan port I/O dan pin yang mempunyai fungsi khusus, yaitu komparator analog dan Timer Oscillator
6. Port D (PD0...PD1) merupakan port I/O dan pin fungsi khusus yaitu komparator analog dan interrupt eksternal serta komunikasi serial
9. AVCC merupakan pin masukan untuk tegangan ADC
10.AREF merupakan pin masukan tegangan referensi untuk ADC
Dalam I/O lines terdapat empat port, yaitu Port A, Port B, Port C, dan Port D yang masing-masing mempunyai 8 pin I/O.
Deskripsi masing-masing port
Tabel 2.3 Fungsi Tambahan Port A
dikonfigurasi baik secara single ended input maupun differrential input. Selain itu, ADC ATMEGA 8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter derau yang sangat dleksibel, sehingga mudah disesuaikan dengan kebutuhan ADC itu sendiri.
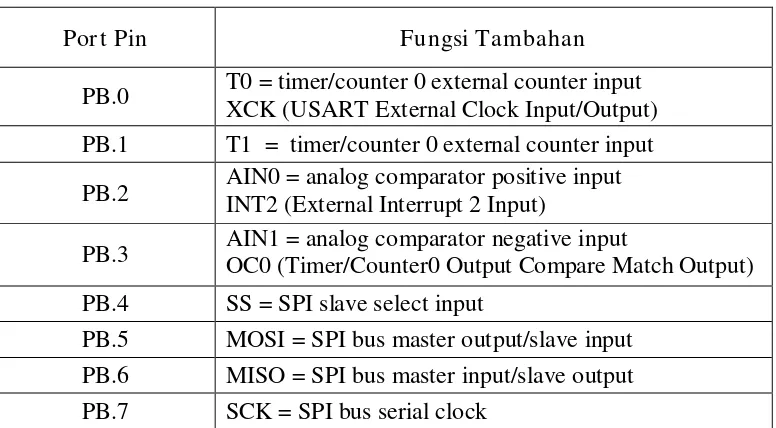
2. Port B (PB7..PB0) merupakan 8-bit port I/O dua arah. Pada PortB terdapat internal Pull-up resistor. Ketika pin di portB disetting low “0” maka arus akan mengalir jika resistor pull-up internal diaktifkan.
Tabel 2.4 Fungsi Tambahan Port B
Port Pin Fungsi Tambahan
PB.0 T0 = timer/counter 0 external counter input XCK (USART External Clock Input/Output) PB.1 T1 = timer/counter 0 external counter input PB.2 AIN0 = analog comparator positive input INT2 (External Interrupt 2 Input)
PB.3 AIN1 = analog comparator negative input OC0 (Timer/Counter0 Output Compare Match Output) PB.4 SS = SPI slave select input
PB.5 MOSI = SPI bus master output/slave input PB.6 MISO = SPI bus master input/slave output PB.7 SCK = SPI bus serial clock
Fungsi khusus PORT B
a. MOSI, MISO, SCK berguna sebagai inputan downloader ISP.
c. AIN0 dan AIN1 sebagai inputan komparator, AIN0 sebagai inputan positif (+) sedangkan AIN1 sebagai inputan (-).
3. Port C (PC7..PC0) merupakan 8-bit port I/O dua arah. Pada PortC terdapat internal Pull-up resistor. Ketika pin di portC disetting low “0” maka arus akan mengalir jika resistor pull-up internal diaktifkan.
Tabel 2.5 Fungsi Tambahan Port C
Port Pin Fungsi Tambahan
PC.0 SCL (Two-wire Serial Bus Clock Line) PC.1 SDA (Two-wire Serial Bus Data Input/Output
Line)
PC.2 TCK (JTAG Test Clock) PC.3 TMS (JTAG Test Mode Select) PC.4 TDO (JTAG Test Data Out) PC.5 TDI (JTAG Test Data In) PC.6 TOSC1 (Timer Oscillator Pin 1) PC.7 TOSC2 (Timer Oscillator Pin 2)
Fungsi Khusus PORTC
a. SCL dan SDA merupakan pin yang dapat berfungsi sebagai mengatur interface serial 2 jalur.
c. TMS merupakan pin yang dapat berfungsi sebagai pengontrol
f. TOSC1 dan TOSC2 jika disambungkan dengan kristal dan bit ASR serta bit ASSR diset “1” (high) untuk mengaktifkan asyncronous clocking dari Timer/Counter2 maka pin ini dapat digunakan sebagai inputan penguat amplifier osilator. Dalam keadaan ini pin tidak dapat berfungsi sebagai I/O.
4. Port D (PD7..PD0) merupakan 8-bit port I/O dua arah. Pada PortD terdapat internal Pull-up resistor. Ketika pin di portD disetting low “0” maka arus akan mengalir jika resistor pull-up internal diaktifkan.
Tabel 2.6 Fungsi Tambahan Port A
Port Pin Fungsi Khusus
PD0 RDX ( UART input pin ) PD1 TDX ( UART output pin )
PD2 INT0 ( external interrupt 0 input ) PD3 INT1 ( external interrupt 1 input )
PD4 OC1B ( timer/counter 1 output compare B match output )
PD5 OC1A ( timer/counter 1 output compare A match output )
PD6 ICP ( timer/counter 1 input capture pin )
PD7 OC2 (timer/counter 2 output compare match output )
Fungsi Khusus PORTD
a. RXD dan TXD merupakan pin yang digunakan untuk komnikasi serial.
b. INT0 dan INT1 merupakan pin yang digunakan sebagai inputan interupsi eksternal 0 dan inputan interupsi eksternal 1 c. OC1A dan OC1B merupakan output untuk PWM mode
fungsi timer dan OC1A juga berfungsi sebagai output eksternal dari pembanding timer/counter A serta OC1B juga berfungsi sebagai output eksternal dari pembanding timer/counter B.
d. ICP1 merupakan pin yang dapat berfungsi sebagai penampung input timer/ counter 1.
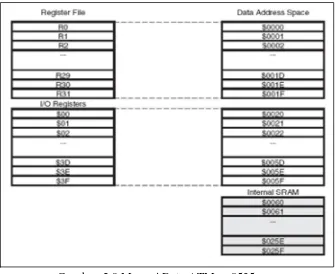
2.8.3 Peta Memory ATMega8535
ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu : 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM internal.
Register untuk keperluan umum menempati space data pada alamat terbawah, yaitu $00 sampai $1F. Register khusus untuk menangani I/O dan kontrol mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 sampai $5F. Register tersebut merupakan register khusus digunakan mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register, timer/counter, fungsi fungsi I/O, dan sebagainya. Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F.
Memori program yang terletak pada Flash Perom tersusun dalam word atau 2 byte karena setiap instruksi memiliki lebar 16-bit atau 32bit. AVR ATMega8535 memiliki 4KByte x 16 Bit Flash Perom dengan alamat mulai dari $000 sampai $FFF. AVR tersebut memiliki 12 bit Program Counter (PC) sehingga mampu mengalamati isi Flash
Gambar 2.10 Memori Program ATMega8535
Selain itu AVR ATmega8535 juga memilki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.8.4 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
1. Bit7 --> I (Global Interrupt Enable), Bit harus di Set untuk mengenable semua jenis interupsi.
2. Bit6 --> T (Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
3. Bi5 --> H (Half Cary Flag)
4. Bit4 --> S (Sign Bit) merupakan hasil operasi EOR antara flag -N (negatif) dan flag V (komplemen dua overflow).
5. Bit3 --> V (Two's Component Overflow Flag) Bit ini berfungsi untuk mendukung operasi matematis.
6. Bit2 --> N (Negative Flag) Flag N akan menjadi Set, jika suatu operasi matematis menghasilkan bilangan negatif.
didesain untuk mikrokontroler buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP.
Cross-compiler C mampu menerjemahkan hampir semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan pada sistem embedded. File object COFF hasil kompilasi dapat digunakan untuk keperluan debugging pada tingkatan C, dengan pengamatan variabel, menggunakan debugger Atmel AVR Studio. IDE mempunyai fasilitas internal berupa software AVR Chip In-System Programmer yang memungkinkan Anda untuk melakukan transfer program kedalam chip mikrokontroler setelah sukses melakukan kompilasi/asembli secara otomatis. Software In-System Programmer didesain untuk bekerja dengan Atmel STK500/AVRISP/AVRProg, Kanda Systems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP,
Futurlec JRAVR dan MicroTronics ATCPU/Mega2000
programmers/development boards.
Untuk keperluan debugging sistem embedded, yang menggunakan komunikasi serial, IDE mempunyai fasilitas internal berupa sebuah Terminal. Selain library standar C, CodeVisionAVR juga mempunyai library tertentu untuk:
1. Modul LCD alphanumeric 2. Bus I2C dari Philips
3. Sensor Suhu LM75 dari National Semiconductor
5. Protokol 1-Wire dari Maxim/Dallas Semiconductor
6. Sensor Suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor
7. Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor 8. EEPROM DS2430 dan DS2433 dari Maxim/Dallas Semiconductor 9. SPI
10.Power Management 11.Delay
12.Konversi ke Kode Gray
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengujinkan Anda untuk menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
11.Inisialisasi Antarmuka Two-Wire 12.Inisialisasi Antarmuka CAN
13.Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307 14.Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20
49
BAB III
ANALISIS DAN PERANCANGAN
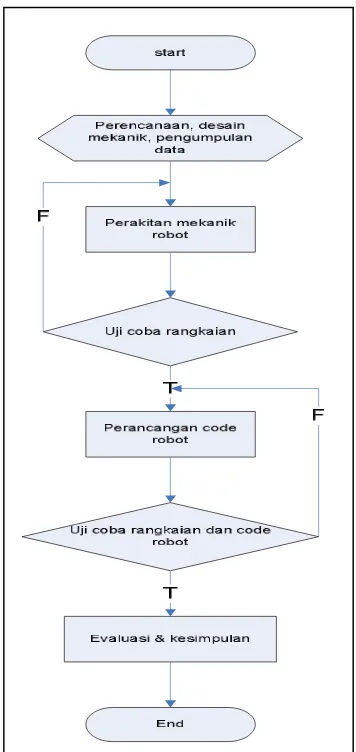
Pada bab ini menjelaskan tentang tahapan-tahapan dalam pembuatan robot terkait dengan perencanaan sistem serta beberapa hal dasar dalam perancangan sebuah robot, bagaimana robot itu dirancang, komponen-komponen apa saja yang dibutuhkan dalam perancangan robot ini, dan flowchart robot. Berikut merupakan diagram alur dalam pembutan robot becak ini.
3.1 Blok Diagram Sistem
Perancangan sistem dari tugas akhir ini mempunyai konfigurasi blok diagram sistem seperti gambar 3.2 dengan alur kerja sistem sebagai berikut.
a. RS 232 diguanakan untuk komunikasi serial sehingga dapat dengan mudah menghubungkan mikrokontroler dengan device lainnya.
b. Motor DC digunakan sebagai penggerak robot, dimana sebagai pengendalian kecepatan menggunakan driver dengan memanfaatkan IC L293D.
c. Modul GPS PMB 648 digunakan Sebagai alat penerima sinyal SiRFstarII™ sebagai masukan yang nantinya diolah oleh ATmega 8535.
d. Modem wavecom digunakan sebagai komunikasi antara handphone dengan perintah AT-command.
e. Ponsel digunakan untuk komunikasi antara user dengan modul
f. ATmega 8535 digunakan sebagai pengolah data yang keluar dan masuk
Gambar 3.2 Blok diagram robot
Dari Gambar 3.2 dapat dijelaskan bahwa perintah dawali dari user untuk mengirim perintah kemudian modem menerima perintah dilanjutkan ke RS 232 untuk mengkomunikasikan pada ATmega 8535 untuk mengambil data dari GPS
receiver dan menjalankan Motor DC, kemudian data dari GPS receiver dikirim kembali ke ponsel user seperti yang terlihat pada Gambar 3.1
Dari sistem tersebut diketahui bahwa sistem terintegrasi antara mekanik, dan perangkat tambahan. Sehingga setiap adanya hambatan atau kesalahan pada salah satu bagian tersebut membuat sistem tidak dapat berjalan dengan semestinya.
3.2 Perancangan perangakat keras
Pada tugas akhir ini dibutuhkan perangkat keras untuk mengimplementasikan serta merupakan sebuah simulasi objek yang aktual dalam melakukan percobaan, agar memudahkan penulis dalam menganalisis keberhasilan sistem yang dirancang, karena jika hanya menggunakan simulasi secara visual penulis tidak akan tahu faktor-faktor lain yang berpengaruh pada kinerja robot, misalnya saja pengaruh dari desain mekanik, posisi komunikasi satelit dengan GPS, dan cara kerja sms dengan rangkaian. Sehingga dibutuhkan perangkat keras untuk aktualisasi cara kerja sistem apakah sudah berjalan sebagaimana mestinya.
3.2.1 Mikrokontroller AT mega 8535
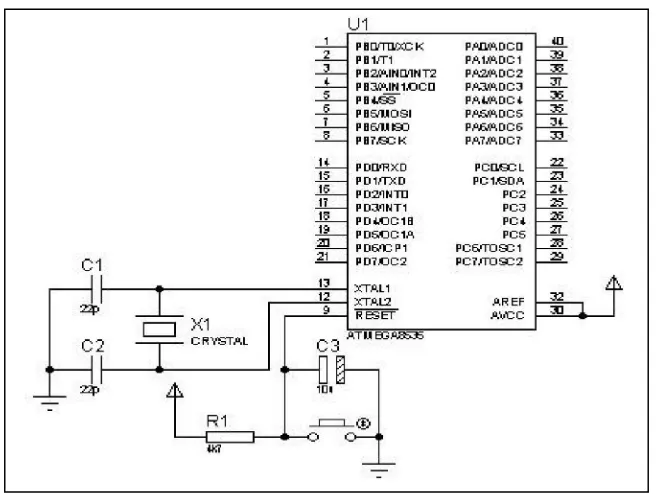
Pada tugas akhir ini menggunakan mikrokontroler ATmega 8535 ditujukan untuk memberikan perintah ke GPS PMB-648 untuk menerima data serial dari GPS dan mengirimkannya ke handphone user. Gambar rangkaian sistem minimum ATmega 8535 dapat di lihat pada gambar 3.3
Gambar 3.3 Rangkaian Sistem Minimum ATmega 8535
3.2.2 Max 232
Gambar 3.4 Rangkaian Max 232
Pada dasarnya IC ini memerlukan komponen tambahan berupa kapasitor ekternal yang dipasangkan pada pin-pin tertentu. Kapasitor ini merupakan rangkaian baku yang berfungsi sebagai charge pump untuk menyuplai muatan ke bagian pengubah tegangan, dimana nilai setiap kapasitor yang dipakai bernilai 1uf
3.2.3 Modem Wavecom
Modem Wavecom Fastrack digunakan pada tugas akhir ini berfungsi sebagai penggerak perangkat elektronik. Dengan kegunaannya sebagai penerima dan pengirim data ke user.
3.2.4 Modul GPS PMB-648
Modul GPS PMB-648 memiliki sensitifitas tinggi untuk pencarian sinyal SiRFstarII™ dengan dua pilihan sumber tegangan yang dapat digunakan yaitu 3.3V sampai 5V. Pada rangkaian, modul HOLUX GR89 diberi tegangan 5V dan tegangan antenna sebesar 3V karena catu daya yang digunakan sebesar ±5V. gambar rangkain modul PMB-648
Gambar 3.6 rangkaian sistem PMB-648
Keluaran pada pin 5 (TXDA) adalah data serial berupa karakter dan mempunyai identitas. Identitas dapat diartikan sebagai nama header yang akan dikirim berikutnya.
3.2.5 Desain Mekanik
Perancangan mekanik pada sistem ini, didasarkan pada bentuk becak dengan tempat duduk penumpang disebelah kiri, dan tempat kemdi disebelah kanan sehingga untuk pemasangan minimal sistem, modul, peletakan motor servo dan motor DC harus disesuaikan dengan kontruksi becak.
Dudukan dan minimal sistem menggunakan bahan acrilyc. Karena bahan-bahan tersebut ringan tapi kuat dan mudah dibentuk sehingga cocok untuk digunakan sebagai kontruksi peletakan modul. Penggunaan bahan-bahan tersebut dikarenakan mudah didapat dan dengan harga yang terjangkau. Di bawah ini adalah skema kontruksi robot becak.
a. Tampak Samping b. Tampak Atas
Gambar 3.7 Skema kontruksi robot
Dari Gambar 3.7 dapat dijelaskan struktur konstruksi dari robot antara lain : 1. Kode “A” adalah jarak antara roda depan dan belakang.
2. Kode “B” diameter roda. 3. Kode “C” jarak sumbu roda
4. Kode “D” adalah lebar dudukan terbuat dari bahan acrylic yang akan digunakan sebagai tempat peletakan minimum sistem.
5. Kode “E” adalah panjang dudukan dengan fungsi sama dengan kode D. Dengan memperhatikan aspek detail robot diharapkan robot akan bergerak stabil dan dinamis seperti harapan penulis.
Gambar 3.8 Mekanik robot tampak dari atas
Dari Gambar 3.8 dapat dijelaskan bahwa pengukuran acrylic didasarkan pada panjang dan lebar minimum sistem dan rangkaian tambahan. Pengaturan letak dibuat sedemikian rupa sehingga masih menjaga seni dari becak itu sendiri. Untuk menjaga kemudi agar tetap lurus digunakan servo yang tidak difungsikan
Gambar 3.9 Mekanik robot tampak dari bawah
Dari gambar 3.9 dapat dijeaskan bahwa pada bagian bawah dapat terlihat motor DC yang telah terpasang dengan roda gila (gear box), dimana roda gila ini
Minimum sistem
Baterai mekanik modem
GPS
M ot or DC
bertujuan untuk membantu meningkatkan torsi dari motor DC, sehingga dapat menggerakkan roda robot.
Penggunaan motor DC dikarenakan motor ini harganya relatif murah dan torsinya cukup tinggi, untuk kendali putarannya dapat diatur dengan menggunakan rangkaian motor driver dengan memanfaatkan IC L293D
Pada bagian tersebut terdapat relay yang nantinya akan berfungsi sebagai saklar dari robot ketika perintah “on” atau “off” diperintahkan melalui sms.
.3.3 Perancangan perangkat lunak
Perangkat lunak (software) yang dibutuhkan untuk mengintegrasikan menjadi satu sistem utuh dibangun dengan menggunakan bahasa C pada CodeVisionAVR.
Penggunaan bahasa C dimaksudkan untuk mempermudah pemrograman. Dibanding assembler, bahasa C lebih mudah dibaca dan dimengerti. Salah satu IDE (Intregated Development Environment) yang cukup membantu dalam mempelajari mikrokontroler AVR RISC 8 bit dengan bahasa C adalah CodeVisionAVR. Kelebihan CodeVisionAVR hanya ada di kemudahan manajemen berkas dan proyek dalam sebuah IDE serta fitur code wizard yang membantu menghasilkan rentetan baris kode untuk keperluan yang umum.
3.4 Perancangan alur system
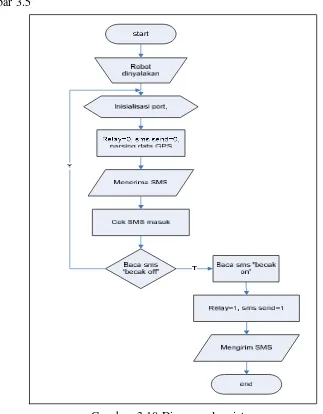
Menentukan proses yang akan dilakukan dalam perancangan perangkat lunak, merupakan hal yang sangat penting agar sistem dapat bekerja dengan baik. Berikut adalah diagram alur program utama mulai dari proses pengiriman pesan sampai pesan diterima kembali oleh user akan ditunjukkan pada gambar 3.5
Gambar 3.10 Diagram alur sistem
59
BAB IV
IMPLEMENTASI
Pada bab ini akan membahas tentang implementasi pembuatan pengendali robot becak ber-GPS menggunakan sms dari hasil analisa dan perencanaan sistem, serta bagaimana cara sistem robot dijalankan. Pada bab ini juga akan dijelaskan tahapan-tahapan sebelum melakukan proses pemrograman menggunakan CodeVisionAVR. Untuk lebih jelasnya akan dibahas pada masing-masing sub bab.
4.1Perakitan Robot
Pada tahapan ini akan dibahas mengenai cara pembuatan rangkaian dari pembuatan PCB robot sampai dengan proses pemasangan komponen. Adapun cara-cara tersebut akan penulis jabarkan sebagai berikut
a. Perakitan PCB (PrintedCircuit Board)
Gambar 4.2 Desain Bagian Atas PCB Robot Becak
Tahapan diatas adalah tahapan awal dalam pembutan tugas akhir ini. Dan berikut merupakan penjelasan dari gambar 4.1 dan gambar 4.2:
Pada Gambar 4.1 merupakan Rangkaian Robot becak. Untuk rancangan atau desain bagian bawah dari PCB Robot becak . sedangakan pada Gambar 4.2 merupakan gambar rangkain komponen dari robot, dimana terdapat konenktor downloader, db9, ATm3ga 8535, RS-232MAX, dll
b. Perangkaian robot
Gambar 4.3 alat-alat tambahan (modem, GPS)
Dari Gambar 4.3 dapat diketahui rangkaian secara lengkap sebelum rangkaian nantinya akan digabungkan dengan becak
4.2 Pemasangan Software
a. Install terlebih dahulu aplikasi Code Vision AVR, klik dua kali setup.exe pada Komputer atau Notebook, seperti pada Gambar-gambar berikut ini.
Gambar 4.4 Proses Ke-1 Installasi program Code Vision AVR Dari gambar 4.4 dapat dijelaskan bahwa gambar tersebut merupakan proses perdiapan software yang akan diinstall.
Gambar 4.6 Proses Ke-3 Installasi program Code Vision AVR Dari Gambar 4.6 dapat dijelaskan bahwa gambar tersebut merupakan permintaan persetujuan untuk penginstallan.
Gambar 4.8 Proses Ke-5 Installasi program Code Vision AVR Dari Gambar 4.8 dapat dijelaskan bahwa gambar tersebut merupakan merupakan tempat peletakan default pada software Code Vision AVR
Gambar 4.10 Proses Ke-7 Installasi program Code Vision AVR Dari Gambar 4.10 dapat dijelaskan bahwa gambar tersebut merupakan proses installasi software yang sedang berjalan.
Gambar 4.11 Proses Ke-8 Installasi program Code Vision AVR Pada Gambar 4.11 dapat dijelaskan bahwa gambar tersebut merupakan proses konfirmasi akhir bahwa software sudah terinstall.
4.3. Implementasi coding
Pada tahap ini akan dijelaskan mengenai proses-proses implementasi program yang akan digunakan pada robot, dari perancangan yang telah dibuat sebelumnya. Langkah selanjutnya yang harus dilakukan adalah pembuatan source code pada robot. Tahapan pertama dalam pembuatan program adalah mendeklarasikan semua fungsi, delay perintah ke perintah yang lain, dan semua port pada mikrokontroler yang digunakan sebagai input dan output dari program yang akan kita susun. Berikut adalah penjelasan pembuatan program pada robot.
Gambar 4.12 Proses Ke-1 pembuatan program dengan Code Vision AVR
Pada Gambar 4.12 dapat dijelaskan proses awal pembuatan source code robot
Pada Gambar 4.13 dapat dijelaskan proses pembuatan file baru dengan tipe source atau project
Gambar 4.14 Sub proses ke-2 pembuatan program dengan Code Vision AVR
Pada Gambar 4.14 dapat dijelaskan proses setting wizard pada robot dengan chip ATmega 8535 dan clock 11.059200 MHz
Gambar 4.15 Konfigurasi port 1
Gambar 4.16 Konfigurasi port 2
Pada Gambar 4.16 dapat dijelaskan mengenai konfigurasi pada port 2 dimana pada port ini berfungsi untuk mengatur jalannya sms pada robot
Gambar 4.17 Konfigurasi USART
Gambar 4.18 Proses ke-2 pembuatan program dengan Code Vision AVR
Pada Gambar 4.18 dapat dijelaskan dari proses pendeklarasian port-port kemudian pengenerate hasil deklarasi.
Gambar 4.19 Proses ke-3 pembuatan program dengan Code Vision AVR
Gambar 4.20 Proses ke-4 pembuatan program dengan Code Vision AVR
Pada Gambar 4.20 dapat dijelaskan tempat penyimpanan data project yang nantinya dapat kita buka lagi untuk mengedit data.
Gambar 4.21 Proses Proses ke-5 pembuatan program dengan Code Vision AVR
Gambar 4.22 Proses ke-4 pembuatan program dengan Code Vision AVR
Pada Gambar 4.22 dapat dilihat potongan coding deklarasi port yang secara instan terinput kedalam potongan koding yang akan dibuat, karena itu merupakan keunggulan dari Code Vision AVR, dimana deklarasi port-port tidak perlu ditulis lagi, karena pada awal pembuatan projek, sudah ada pengaturan untuk deklarasi port yang selanjutnya akan terinput secara otomatis
4.4 Implementasi Robot
Gambar 4.23 Implementasi robot
73
BAB V
UJ I COBA DAN EVALUASI
Pada bab ini akan dibahas mengenai pengujian dari sistem yang telah dibuat.
Pengujian ini dilaksanakan untuk mengetahui apakah sistem sudah sesuai dengan
perencanaan atau belum. Untuk mengetahui tingkat keberhasilan dari tugas akhir ini
maka akan dibuat beberapa studi kasus, dan akan diujicobakan pada robot becak.
Studi kasus yang dilakukan pada bab ini adalah :
1. Respon minimum sitem pada saat menerima perintah “on”
2. Respon modem dan GPS pada beberapa jenis halangan. (beton, pepohonan,
didalam ruangan)
Kedua studi kasus di atas, akan dibahas lebih detail pada sub bab berikut.
5.1 Respon Rangkaian ter hadap per intah “On” Melalui SMS
Uji coba ini dilakukan untuk mengetahui cara kerja rangkaian dalam
mengeksekusi perintah yang diberikan oleh user berupa perintah “on” dan
mengetahui respon dari rangkaian terhadap perintah user.
5.1.1 Peralatan Yang Dibutuhkan
Pada sub bab ini dijelaskan beberapa alat yang dibutuhkan dalam melakukan
• Laptop, minimum sistem dan USP ISP downloader
• Handphone
5.1.2 Parameter
Pada sub bab ini dilakukan pengujian gerak robot dengan semua rangkaian
yang terpasang dan respon modem dalam menerima sms kemudian meneruskannya
ke proses selanjutnya.
5.1.3 Pr osedur
Pada sub bab ini merupakan urutan apa saja yang perlu dilakukan sebelum
melakukan uji coba
• Masukkan program melalui AVR ISP port
• Nyalakan robot
• SMS perintah “on” pada robot
5.1.4 Hasil Pengujian
Dari hasil pengujian yang didapatkan ketika robot dinyalakan robot
pada posisi diam ketika user member perintah “on” pada user robot bergerak
dan mengirim data berupa koordinat pada user yang telah mengaktifkannya,
Gambar 5.1 SMS perintah dan data yang dikirim oleh robot
Dari gambar 5.1 dapat dijelaskan bahwa ketika robot diperintah untuk “on”
maka setelah diterima perintah tersebut robot mengirim data berupa
koordinat-kordinat pada user
Gambar 5.3 Robot berhenti ketika menerima perintah “off”
5.1.5 Evaluasi
Dari percobaan diatas terkadang terjadi keterlambatan dalam
menerima pesan dari user hal ini biasanya dikarenakan jangkauan sinyal pada
operator seluler, dari percobaan tersebut terkadang data koordinat yang
dikirim ke user terkadang tidak valid hal ini disebabkan oleh tempat dan letak
satelit diatasnya.
5.2 Respon Modem & GPS Ter hadap Beberapa J enis Halangan
Uji coba ini dilakukan untuk mengetahui seberapa peka modem untuk
menerima dan mengirim informasi kepada user dan seberapa peka GPS yang
digunakan untuk menerima data-data yang akan diberikan pada user.
5.2.1 Peralatan Yang Dibutuhkan
Pada sub bab ini dijelaskan beberapa alat yang dibutuhkan dalam melakukan
percobaan ini. Berikut adalah daftar peralatan yang dibutuhkan dalam uji coba kinerja
modem dan GPS.
• Laptop, minimum sistem dan USP ISP downloader
• Handphone,
5.2.2 Parameter
Pada sub bab ini dilakukan pengujian robot dengan beberapa kondisi dan
parameter yang berbeda.
• Halangan di dalam gedung
• Halangan pepohonan rimbun
• Di dalam rumah
5.2.3 Pr osedur
Pada sub bab ini merupakan urutan apa saja yang perlu dilakukan sebelum
melakukan uji coba
• Masukkan program melalui AVR ISP port
• Jalankan robot dan beri halangan di depan, sisi kiri dan kanan secara
5.2.4 Hasil
a. Halangan didalam gedung
Dari uji coba yang dilakukan pada halangan didalam gedung modem
merespon beberapa detik setelah perintah “on” dikirim dan GPS bekerja
dengan baik pada halangan ini tetapi pada saat dicoba sekali lagi GPS
memberikan data yang tidak valid.
Gambar 5.4 Uji coba didalam gedung beton
b. Halangan pepohonan r imbun
Dari uji coba yang dilakukan pada halangan pepohonan yang rimbun
merespon dengan baik setelah perintah “on” dikirim dan GPS bekerja
Gambar 5.5 Uji coba pada pepohonan rimbun
c. Di dalam r umah
Dari uji coba yang dilakukan pada halangan didalam rumah modem
merespon dengan baik setelah perintah “on” dikirim dan GPS bekerja
dengan baik pada halangan ini
80
BAB VI
PENUTUP
6.1 Kesimpulan
Setelah melakukan perencanaan dan pembuatan sistem, kemudian dilakukan
pengujian dan analisa, maka dapat diambil beberapa kesimpulan tentang system kerja
alat dan system perangkat lunak, yaitu sebagi berikut :
• Robot dapat bergerak dan berhenti apabila mendapat perintah melalui sms.
• Rangkaian minimal sistem yang dibuat dengan memanfaatkan ATMega
8535 sebagai mikrokontroler dapat berjalan dengan baik dan stabil.
• Cepat/lambatnya sms yang diterima dan disampaikan tergantung pada
operator
• Ketepatan hasil parsing data GPS dipengaruhi pada letak satelit diatasnya
6.2 Saran
Untuk pengembangan lebih lanjut mengenai robot becak, dapat diajukan
beberapa saran, antara lain ;
• Untuk actuator utamapenggerak robot, lebih baik menggunakan motor
servo continus. Karena motor servo memiliki putaranrendah dan torsi
• Untuk perintah menggunakan sms pada robot dapat dikembangkan menjadi pergerakan kekiri dan kekanan serta mundur ke belakang dengan
mementukan jarak pada pergerakan masing-masing
• Untuk GPS nantinya dalam perkembangan selanjutnya dapat mendeteksi
82
2009, Adynata kristanto, ATmega 8535 diakses online pada tanggal 25 desember 2011
http://repository.usu.ac.id/bitstream/123456789/14237/1/09E02633.pdf [1]
2011, mikrokontroller ATmega8535
http://dorado.web.ugm.ac.id/2011/04/12/mikrokontroler-atmega-8535-bab-3-terakhir/[2]
Datasheet, Chapter II, diakses online pada tanggal 25 desember 2011 dari
http://repository.usu.ac.id/bitstream/123456789/20722/4/Chapter%20II.pdf[3]
Datasheet, sejarah robotika, diakses online pada tanggal 25 desember 2011 dari
http://repository.usu.ac.id/bitstream/123456789/27566/4/Chapter%20II.pdf[4]
Diskusi ATmega8535 diakses online pada tanggal 25 desember 2011[10]
http://elib.unikom.ac.id/files/disk1/377/jbptunikompp-gdl-irwansetyo-18848-10-10_penge-r.doc[5]
Modem wavecom fastrack, diakses online pada tanggal 9 januari 2012
http://kiswara.com/seputar-modem-wavecom-fastrack-67-19.info[6]
Pengertian Relay diakses online pada tanggal 15 januari 2012
http://josuru.blogspot.com/2009/06/pengertian-relay.html[8]
Penjelasan AT Command untuk sms 0183, diakses online pada tanggal 27 desmber 2011
http://www.mikron123.com/index.php/Aplikasi-SMS/AT-Command-Untuk-SMS.html[9]
Penjelasan GPS NMEA 0183, diakses online pada tanggal 27 desmber 2011
http://www.mikron123.com/index.php/Aplikasi-GPS/Penjelasan-GPS-NMEA-0183.html[10]
RS-232 diakses online pada tanggal 12 januari 2012
http://id.wikipedia.org/wiki/RS-232[11]
Winardi, Penetuan posisi dengan GPS, diakses online pada tanggal 25 desember 2011