Mekanika dan
Desain dan Pembuatan Sistem Steering Ornithopter Berdasarkan
Gerakan Ekor dan Kepala
Rizky Dwi Permana P., Dr. Eng. Indra Adji S., S.T., M.Eng., Endah S.Ningrum, S.T., M.T.
Program Studi D4 Teknik Mekatronika Departemen Mekanika dan Energi Politeknik Elektronika Negeri Surabaya Kampus PENS, Jalan Raya ITS Sukolilo, Surabaya 60111
Tel: (031) 594 7280; Fax: (031) 594 6114
Email: [email protected],[email protected],[email protected]
Abstrak
Melakukan heading atau yawing, pitching dan rolling adalah hal yang pasti terjadi dan penting dilakukan oleh berbagai wahana terbang sebagai penentu arah terbang. Rudder, elevator dan aileron adalah sistem steering pesawat dengan prinsip kerja yang sangat mendasar namun sangat optimal. Ornithopter yang terbang dengan memanfaatkan kepakan sayapnya diharuskan mampu mengubah arah menggunakan satu-satunya penentu arah yakni ekor. Ekor juga sebagai pengendali kestabilan dan ketinggian ornithopter. Bentuk ekor yang sejajar dengan sayap dapat menghasilkan gaya angkat pada ornithopter akibat sudut serang yang dibentuknya. Dalam hal ini ekor tersebut bekerja sebagai elevator. Untuk melakukan
heading atau yawing, secara sederhana cukup menambahkan rudder yang diletakkan tegak lurus terhadap ekor yang berfungsi sebagai elevator. Sebagai penggerak nya dapan memanfaatkan fungsi dari motor servo. Dua buah servo dapat memberikan kombinasi gerakan ekor bahkan kepala. Kepala akan menambah torsi dan membantu tugas ekor sebagai penentu arah. Satu ekor yang memiliki satu sendi peluru dapat digerakkan mengangguk dan menggeleng dengan kombinasi putaran dua buah servo. Didalam sebuah transmitter RC dapat diambil satu kontrol V-Tail untuk menciptakan kombinasi putaran dua buah servo. Hasilnya, gerakan ekor akan lebih fleksibel sesuai dengan jangkauan sendinya.
Kata kunci: Ornithopter, steering, roll, pitch, yaw, sonar, rudder, elevator, aileron, V-Tail
1.PENDAHULUAN
Selama ini bentuk wahana terbang masih banyak memanfaatkan tenaga turbin dan propeler sebagai penggerak utamanya. Sebagaimana kita ketahui bahwa bentuk dasar dari pesawat adalah tiruan dari bentuk rangka burung. Burung sendiri terbang tanpa menggunakan turbin atau propeler melainkan kepakan kedua sayap yang dimilikinya. Seluruh anatomi tubuh burung merupakan awal terbentuknya berbagai macam pesawat mulai pesawat yang berteknologi rendah hingga berteknologi canggih sekalipun namun hampir tidak ada yang memiliki mekanisme terbang seperti burung.
Hal tersebut merupakan kesempatan bagi bidang robotik untuk menambah ranah ilmunya dengan menciptakan ornithopter sebagai robot burung yang nantinya diharapkan dapat menjadi alat yang bermanfaat dalam berbagai bidang contohnya di bidang intelijen, entertainment, militer, geofisika, dsb.
Pembuatanwahana ini sangatlah perlu beberapa peninjauan. Dari segi desain mekanik yang perlu dipelajari lebih dalam karena memiliki struktur yang cukup rumit. Untuk mendapatkan gerakan yang terarah, maka diperlukan sebuah mekanik yang presisi dan ringan agar menghasilkan suatu struktur yang aerodinamis. Sistem
2.TEORI PENUNJANG
2.1 EMPAT GAYA YANG BEKERJA PADA BURUNG
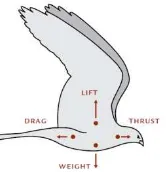
Untuk mengetahui gaya aerodinamis dari burung, diperlukan empat gaya yang ideal (Prum, 2008). Gambar 1 berikut adalah diagram gaya yang bekerja pada burung.
Gambar 1: Empat Gaya yang Bekerja pada Burung Terbang-Weight, Lift, Drag dan Thrust
Sumber: Richard O. Prum, Leonardo and the Science of Bird Flight, 2008, Yale University, New Haven. Hal:111-112.
Ada dua gaya luar yang bekerja pada burung terbang. Weight adalah gaya yang mengarah ke bawah, gaya ini timbul secara alamiah karena terjadi akibat pengaruh gravitasi bumi dan menciptakan massa pada tubuh burung. Yang kedua adalah drag, yaitu gaya gesek yang terjadi akibat gerakan maju dari burung terhadap udara yang mengalir di permukaan tubuhnya. Gaya drag ini yang menjadi impedansi bagi pergerakan ornithopter saat terbang.
Burung juga menghasilkan gaya lain dari kepakan sayapnya. Salah satu gaya yang dihasilkan oleh kepakan sayap adalah lift. Gaya lift bekerja secara vertical menghasilkan gaya aerodinamis yang menyebabkan burung dapat terbang dan melayang di udara bebas. Selain mampu menghasilkan gaya lift, kepakan sayap burung juga menghasilkan gaya thrust. Gaya thrust adalah gaya yang menyebabkan tubuh burung untuk bergerak maju. Gambar 2 berikut adalah aliran udara yang menyebabkan adanya empat gaya tersebut.
Gambar 2: (a) Kondisi Sayap Saat Melayang (b) Kondisi Saat Sayap Mengepak
Sumber: Richard O. Prum, Leonardo and the Science of Bird Flight, 2008, Yale University, New Haven. Hal:113
Ditinjau dari dua karakter gaya tadi, gaya luar dan gaya dalam bekerja saling berlawanan. Maka dapat disimpulkan bahwa untuk terbang, burung harus memiliki usaha yang menghasilkan gaya dalam lebih besar daripada gaya luarnya.
Yang perlu ditinjau lebih lanjut untuk dapat melawan gaya luar tersebut yaitu bagaimana burung dapat menciptakan gaya lift dan thrust. Untuk mendapatkan gaya tersebut, perlu tinjauan lebih lanjut tentang struktur sayap (Prum, 2008).
Bentuk fisik dari burung terbang dapat dianalisa dengan melihat mekanika fluida dengan cara mengidentifikasi beberapa perbedaan gaya yang bekerja pada burung terbang. Teori penerbangan menyediakan sarana untuk memperkirakan tingkah laku penerbangan yang diinginkan dan morfologi sayap yang optimal, ekor dan rangka burung (Thomas & Hedenstrom, 1999). Gaya aerodinamis yang bekerja pada sayap mengacu pada prinsip Bernoulli.
2.2 SUMBU PUTAR ORNITHOPTER
Jika perhitungan center of gravity telah didapatkan, maka langkah selanjutnya adalah menetapkan CG tersebut sebagai sumbu putar. Sumbu putar ini berfungsi ketika ornithopter memiliki sumbu putar yang sama dengan pesawat terbang, yaitu roll, pitch dan yaw. Setiap wahana terbang akan berputar terhadap center of gravity yang terletak di titik massa rata-rata tubuh ornithopter (Benson, 2008).
Roll (gulingan) adalah putaran yang menyebabkan bagian samping benda berada pada posisi yang berlawanan. Gerakan roll akan menghasilkan suatu kemiringan antara sisi kiri dan sisi kanan pada benda terbang.
Pitch (anggukan) adalah putaran yang menyebabkan bagian depan dan belakang benda berada di posisi yang berlawanan. Gerakan pitch dapat menghasilkan gerak naik dan turun pada pesawat terbang. Yaw (gelengan) adalah putaran yang menyebabkan perpindahan ujung depan benda dan ujung belakang benda bergerak melingkar ke kanan dan ke kiri. Gerakan ini dapat membelokkan pesawat terbang ke kanan atau ke kiri. Gambar 3 berikut adalah diagram gerak roll, pitch dan yaw terhadap center of gravity.
Gambar 3: Diagram Gerakan Roll, Pitch , dan Yaw
Sumber: http://www.gizmag.com/smartbird-roboticseagull/18228/picture/132312/
(diakses pada tanggal 30 Juni 2012 jam 20:00 WIB)
Dari diagram sumbu tersebut maka dapat dilihat bagaimana putaran roll, pitch dan yaw terhadap center of gravity. Dalam mengendalikan arah dari ornithopter diperlukan sebuah fungsi rudder dan elevator. Fungsi dari alat-alat tersebut akan diaplikasikan pada ekor ornitopther. Ekor burung sesungguhnya dapat melakukan gerak
roll untuk dapat membelokkan tubuhnya. Pada ornithopter yang akan dibuat kali ini, untuk membelokkan tubuh, maka diperlukan bentuk ekor yang mirip dengan bentuk ekor pesawat yakni terdapat rudder. Untuk menaikkan dan menurunkan tubuh ornithopter, sama halnya dengan ekor pesawat terbang yakni menggunakan ekor sebagai
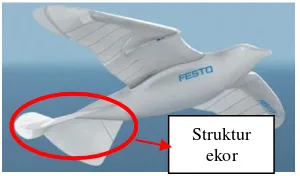
elevator. Lebih kurang bentuk ekor ornithopter terlihat pada gambar 4 berikut.
Gambar 4: Bentuk Ekor Sebagai Rudder dan Elevator
Sumber: Festo, Aerodynamic Lightweight Design with Active Torsion,Festo AG & Co. KG, Esslingen, 2011, hal:1
Burung sesungguhnya tidak memilki rudder seperti layaknya pesawat, namun fungsi ekor burung dengan struktur yang sedemikian rupa memiliki kemampuan untuk membelokkan angin kearah samping sehingga fungsinya seperti rudder.
2.2.1 RUDDER
Pada pesawat terbang, rudder digunakan sebagai pengendali gerak yaw. Rudder digunakan dalam mengarahkan pesawat ke kanan atau ke kiri. Rudder membentuk sudut defleksi dan menghasilkan sudut serang (angle of attack). Sudut serang itu lah yang menghasilkan perbedaan tekanan pada sisi rudder dan terdapat torsi antara titik pusat gravitasi dan titik penempatan rudder. Semakin besar sudut serang yang dibuat, maka tekanan yang menghempas di salah satu sisi rudder akan semakin besar pula torsi yang dihasilkan sehingga momen yaw juga semakin besar. Gaya yang bekerja pada rudder terlihat pada gambar 5 berikut.
Gambar 5: Letak Rudder Terhadap Center of Gravity Sumber: http://www.grc.nasa.gov/WWW/k-12/airplane/rud.html
(diakses pada tanggal 29 Juni 2012 jam 12:01 WIB)
Beberapa variabel yang menentukan besarnya sudut belok yaitu jarak antara titik pusat gravitasi terhadap rudder, luas penampang rudder, dan sudut defleksi pada rudder (McCormick,1995). Gaya pada
rudder dapat dimodelkan dengan persamaan sebagai berikut:
... (1)
... (2)
... (3)
Dimana:
Tyaw= Momen yaw (Nm)
Ftail= Gaya pada rudder (N)
L= Jarak center of gravity ke rudder (m)
ρ= Kerapatan udara
v= Kecepatan udara pada benda (m/s)
cl= Koefisien lift s= Luasan rudder (m2)
θ= Sudut serang (derajat)
Rudder pada robot burung diaplikasikan pada ekor. Ekor burung sebenarnya tidak memiliki rudder , namun pada proyek akhir ini rudder ditambahkan pada ujung ekor robot burung agar robot tersebut mampu melakukan putaran yaw dengan baik.
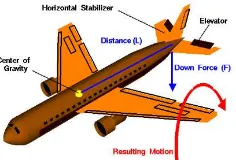
2.2.2 ELEVATOR
Prinsip kerja elevator sama saja dengan rudder, yaitu menghasilkan momen agar pesawat dapat mengubah arah. Perbedaan antara rudder dan elevator yaitu pada fungsinya. Elevator digunakan untuk mengendalikan pitch. Gambar 6 berikut menunjukkan gaya yang bekerja pada elevator.
Gambar 6: Letak Elevator Terhadap Center of Gravity Sumber: http://www.grc.nasa.gov/WWW/k-12/airplane/elv.html
(diakses pada tanggal 29 Juni 2012)
Pemodelan elevator secara matematis juga sama dengan rudder sebagaimana ditunjukkan pada persamaan berikut:
... (4)
Dimana:
Tpitch= Momen pitch (Nm)
Ftail= Gaya pada elevator (N)
L= Jarak center of gravity ke rudder (m)
ρ= kerapatan udara
v= Kecepatan udara pada benda (m/s)
cl= koefisien lift s= Luasan rudder (m2)
θ= Sudut defleksi rudder (derajat)
Prinsip kerja elevator ini sebenarnya adalah hasil adopsi dari struktur ekor burung. Oleh karena itu, pembuatan elevator robot burung ini berarti kembali mengaplikasikan struktur alami burung. Struktur ini akan berguna saat robot bergerak mancapai suatu ketinggian saat melayang
3.SISTEM PERANCANGAN
3.1 PERANCANGAN MEKANIK
Desain Ekor dan Kepala
Ekor dan kepala robot burung bergerak dengan tenaga dari motor mini servo, namun gerakannya terbatas karena tidak dapat melakukan gerak roll. Gerakan ekor diikuti dengan gerakan kepala dengan arah gerak yang sama. Kepala dan ekor ditunjukkan pada gambar 7 berikut.
Gambar 7: Desain Ekor dan Kepala Robot Burung
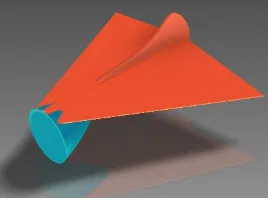
Dari gambar diatas nantinya akan terdapat pengait berupa pushrod yang menggerakkan ekor dan kepala sehingga bagian tersebut dapat bergerak berdasarkan prinsip sendi peluru. Dengan mekanisme seperti itu maka kepala dan ekor dapau bergerak mengangguk dan menggeleng. Untuk bentuk ekor sendiri mengadaptasi fungsi dari rudder dan elevator seperti terlihat pada gambar 8 berikut.
Gambar 8: Ekor Sebagai Rudder dan Elevator
Detail ukuran rudder dan elevator tercantum pada lampiran 3. Luasan rudder dan elevator didapatkan melalui software Autodesk Inventor. Pada lampiran tersebut diketahui bahwa luasan rudder dan elevator masing-masing 0,00288705 m2 dan 0,016798 m2.
Untuk perhitungan rudder dan elevator dilakukan melalui beberapa tahap yaitu: 1. mendapatkan center of gravity dari seluruh tubuh,
2. mendapatkan center of gravity dari ekor masing-masing rudder dan elevator,
4. memperkirakan kecepatan angin yang akan menghempas rudder dan elevator,
5. penghitungan gaya yang bekerja pada rudder dan elevator menggunakan rumus (2.8) untuk rudder
dan rumus (2.11) untuk elevator,
6. karena bentuk sirip ekor berbentuk datar tanpa menggunakan airfoil maka cl didapatkan dengan rumus (2.9),
7. didapatkan momen yang terjadi menggunakan rumus (2.7) untuk rudder dan (2.10) untuk elevator,
8. Untuk mendapatkan percepatan sudut, didapatkan dari hubungan T=I.α, dimana I adalah momen inersia dan α adalah percepatan sudut,
9. Momen inersia didapatkan dari I=m.L2, dimana I adalah momen inersia, m adalah massa, dan L adalah lengan antara center of gravity ornithopter (terletak di 30% dari panjang chord) dan center of gravity
ekor. Khusus ekor, center of gravity dari rudder dan elevator berbeda, karena bentuknya berbeda.
Pada robot ini, letak center of gravity telah ditentukan berada di 67 cm dari ujung depan sayap karena panjang chord adalah 20 cm. Gambar 9 Berikut adalah letak center of gravity dari rudder terhadap center of gravity ornithopter. Center of gravity dari rudder didapatkan dari analisa yang dilakukan melalui software
AutodeskInventor.
Gambar 9: Jarak Antara Center of Gravity dari Ornithopter dan Center of Gravity dari Rudder
Pada tabel 1 berikut adalah hasil perhitungan torsi rudder berdasarkan perubahan sudut serang.
Tabel 1: Perhitungan Torsi Rudder
m=0.18 Kg; L= 0,27 m; ρ= 1,2 Kg/m3;v= 3 m/s; s= 0,00288705 m2 θ
(derajat) θ
(rad) cl=2π.θ
Fyaw(N)= T
yaw(Nm)= α(m/s2)= Tyaw /I
5 0.087 0,548 0,008 0,002 0,176
10 0.174 1,097 0,017 0,005 0,352
15 0.261 1,645 0,025 0,007 0,528
20 0.349 2,194 0,034 0,009 0,704
25 0.436 2,742 0,042 0,011 0,880
30 0.523 3,291 0,051 0,013 1,056
Gambar 10 berikut adalah letak center of gravity dari elevator terhadap center of gravity ornithopter. Center of gravity dari elevator didapatkan dari analisa yang dilakukan melalui software Inventor.
Pada tabel 2 berikut adalah hasil perhitungan torsi elevator berdasarkan perubahan sudut serang.
Tabel 2: Perhitungan Torsi Elevator
m=0.18 Kg; L= 0,238 m; ρ= 1,2 Kg/m3;v= 3 m/s; s= 0,016798 m2 θ
(derajat) θ
(rad) cl=2π.θ
Fyaw(N)= T
yaw(Nm)= α(m/s2)= Tyaw /I
5 0.087 0,548 0,050 0,012 1,161
10 0.174 1,097 0,100 0,024 2,322
15 0.261 1,645 0,150 0,036 3,484
20 0.349 2,194 0,201 0,047 4,645
25 0.436 2,742 0,248 0,060 5,807
30 0.523 3,291 0,299 0,071 6,968
Hasil pada tabel tersebut menunjukkan adanya perubahan torsi beserta percepatan sudut akibat perubahan sudut serang. Semakin besar sudut serang, maka percepatan sudut yang dihasilkan juga bertambah besar.
3.2 PENGUJIAN MEKANIK
Setelah dilakukan pengujian servo maka hasilnya dapat digunakan sebagai acuan dalam membangun sistem
steering. Pada pengujian kali ini akan ditunjukkan bagaimana fitur V-Tail dapat dimanfaatkan untuk sistem
steering yang diterapkan pada robot PENS Smartbird. Gambar 11 berikut menunjukkan posisi awal kepala dan ekor saat tidak digerakkan.
Gambar 11: Posisi Kepala dan Ekor Netral
3.1.2 HASIL PERCOBAAN
Posisi Menunduk dan Mendongak
Pada gerak menunduk, motor servo dikombinasikan sedemikian rupa sehingga kepala terdorong dan membentuk gerakan menunduk. Gambar 12 berikut adalah kombinasi putaran servo dan hasil gerakan kepalanya. Posisi kepala dan ekor yang seperti itu akan menyebabkan robot mengarah kebawah
Gambar 12: Posisi Kepala dan Ekor Menunduk
Gambar 13: Posisi Kepala dan Ekor Mendongak
Posisi kepala dan ekor yang seperti ini akan menyebabkan robot terbang kearah atas. Sudut maksimal yang dihasilkan untuk mendongak dan menunduk sebesar 30o.
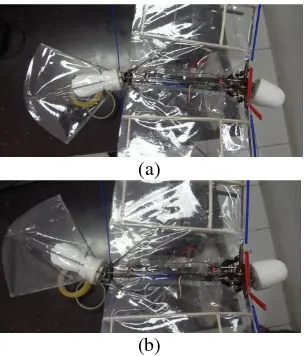
Posisi Menggeleng Ke Kanan dan Ke Kiri
Gerakan menggeleng ke kanan dan ke kiri adalah hasil dari kombinasi putaran servo yang saling berlawanan dengan sudut yang sama. Gambar 14 berikut adalah gerakan menggeleng ke kiri dan ke kanan hasil dari kombinas gerakan servo.
(a)
(b)
Gambar 14: Kepala dan Ekor Menggeleng: (a) Ke Kanan (b) Ke Kiri
Gerakan ini sangat penting dalam bermanuver di udara, karena robot harus dapat berbelok ke kanan dan ke kiri untuk menentukan arah gerak robot saat terbang. Sudut maksimal yang dihasilkan untuk menggeleng sebesar 30o.
4.KESIMPULAN
Setelah melakukan tahap perancangan dan pembuatan sistem yang kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut.
1. Ekor pada ornithopter merupakan penghasil torsi sehingga dapat membelokkan tubuh ornithopter. 2. Penambahan kepala pada ornithopter mampu menambah torsi.
3. Semakin lebar penampang ekor maka torsi yang dihasilkan semakin besar.
4. Semakin besar kecepatan angin yang berhembus di tubuh ornithopter maka torsi yang dihasilkan juga semakin besar.
REFERENSI
Benson, T. (2008, July 11). Aircraft Rotation, dari Nasa Glenn Research Center: http://www.grc.nasa.gov/WWW/k-12/airplane/pitch.html, diakses pada tanggal 29 Juni 2012
Hewitt, P. G. (2004, September). Bernoulli's Principle. Understanding Bernoulli's principle as it applies to aerodynamic lift , pp. 52-53.
Prum, R. O. (2008). Leonardo and The Science of Bird Flight. 111-112.