RANCANG BANGUN PROTOTYPE ROBOT VOIDER PENYEDOT DEBU
OTOMATIS BERBASIS ARDUINO
Prasetyo Andi Wicaksono, Wisnu Wendanto
STMIK AUB SurakartaABSTRACT
The development of computer technology which is connected to other devices with the aim to facilitate the work of man experiencing a development. Robot is one of the equipment or technology that is being developed at this time, and is used to assist the work of man. Of the many possible applications of robotic Avoider of the most popular. But this robot can be developed to be developed for robots rockner dust automatic, Of this is then writer have the idea of make the prototype avoider robot reckoner dust automatic, How to work this robot is the robot around the floor flat and avoid persecution and there are fan as the prototype to suck dust. This robot combining hardware and software, use microcontroler arduino as control robot, Ultrasonik HC-SR04 as sesnsor a barrier, fan as the prototype reckoner dust, and driver motor as control the motion of a wheel. With usually clear away dust on the floor flat ecpected a robot can outshine first
Keywords : Robot Avoider Vacuum Cleaner, Ultrasonik HC-SR04
I. PENDAHULUAN
Dalam kehidupan sehari-hari udara yang kita hirup tidak selamanya bersih. Kadang kala udara tersebut terkandung partikel pencemar yang disebut polutan. Salah satu polutan tersebut ialah berupa butiran debu yang banyak ditemukan pada disekitar kita baik dirumah maupun diluar rumah. Kegiatan menyingkirkan debu di rumah kadang tanpa akhir karena begitu selesai dibersihkan, permukaan isi rumah segera ditempeli debu lagi. Debu mengandung partikel-partikel kulit mati, serbuk tanaman kering, sisa-sisa serangga mati, dan lain-lain. Debu yang menumpuk tidak hanya merusak pemandangan, tetapi juga menyebabkan bau tak sedap.
Dalam membersihkan debu yang berada didalam rumah masyarakat masih menggunakan cara manual yaitu seperti menggunakan sapu lidi dan kemoceng untuk membersihkan debu yang ada pada lantai, hal ini masih dinilai lamban, efisiensi waktu dalam membersihkan debu dilantai dinilai kurang apabila dibandingkan dengan menggunakan teknologi robot.
Robot merupakan salah satu dari peralatan atau teknologi yang sedang berkembang saat ini, dan digunakan untuk membantu pekerjaan manusia sehari- hari. Robot bisa diprogram sesuai keinginan dan kebutuhan manusia tersebut. Robot penghindar halangan (Avoider) adalah
adanya halangan di sekitar. Robot avoider juga dapat dikembangkan sebagai robot pembersih debu, yaitu cara kerjanya selain berjalan menghindari halangan yang berada didepanya robot ini juga dapat membersihkan debu secara otomatis dengan menggunakan kipas penyedot guna untuk mempermudah pekerjaan manusia dalam membersihkan lantai yang penuh dengan debu yang berada disekitarnya.
Hal itulah yang mendorong penulis untuk menyusun penelitian perancangan Robot Penghisap Debu Otomatis, guna untuk mempermudah pekerjaan manusia sehari hari dalam membersihkan debu yang ada pada ruangan. Untuk itu, dalam penyusunan penelitian penulis menyajikan sebuah judul “Rancang Bangun Prototype Robot Avoider Penghisap Debu Otomatis Berbasis Arduino Uno”.
II. TINJAUAN PUSTAKA
a. Penelitian yang telah dilakukan oleh Elang Derdian Marindani (2011) dari Universitas Tanjungpura Pontianak Tenggara Kalimantan Barat yang berjudul “Robot Mobile Penghindar Halangan (Avoider Moibile Robot) Berbasis Mikrokontroler AT89S51”. Pada robot avoider ini, yang digunakan adalah sensor ultrasonik, dua buah
Teknik Elektro Depok yang berjudul “Rancang Bangun Robot Beroda Penghindar Halangan”. Pada robot avoider ini, Jenis pengendali yang digunakan untuk robot beroda adalah mikrokontroler AT89S51, bahasa pemrogaman yang dituliskan kedalam mikroprosessor pengendali adalah bahasa assembly,sensor ultrasonik digunakan sebagaiinput pengendali yang berfungsi sebagai pendeteksi halangan disekitar robot beroda, sekaligus sebagai umpan balik sistem, Akuator menggunakan motor DC dengan menggunakan sistem pengendali akuator IC L293D, pengiriman data jarak ke komputer melalui serial. Kelebihan robot ini adalah untuk menghindari halangan juga dapat melakukan digunakan pengiriman data jarak ke komputer dengan menggunakan antar muka serial, kekurangan robot ini sensor ultarsonik yg digunakan masih satu buah.
c. Penelitian yang telah dilakukan oleh Frega Haryansyah (2010) dari Fakultas Teknologi Industri Universitas Pembangunan Nasional
“Veteran”Jawa Timur yang berjudul“Robot Penghindar Halangan Dengan Mikrokontroler AT89C bahasa pemrograman C ++. Kelebihan
robot ini hanya dapat mengidentifikasi suatu halangan yang berada di depan, samping kanan, maupun samping kiri robot sehingga didapatkan respon untuk menghindarinya. Kekurangan robot ini hanya dapat menghindari halangan yang berada didepanya dan tidak ada aksi yang lain selain menghindari halangan.
Penelitian yang dilakukan oleh penulis adalah robot avoider penghisap debu otomatis berbasis arduino. Kelebihan robot yang dibuat penulis adalah alat ini menggunakan Arduino sebagai board mikrokontroler berbasis ATmega328, software pemrogaman yang digunakan adalah Ide Arduino dan menggunakan sensor ultrasonik sebagai sensor penghalang, menggunakan kipas dan magnet untuk menyedot debu, jadi selain menghindari halangan robot ini juga sebagai salah satu prototipe robot penghisap debu otomatis. Kekurangan dari robot ini yaitu sensor ultrasonik hanya ada satu buah , penyedot debu masih magnet dan kipas sebagai prototipe.
III. METODE PENELITIAN 3.1. Analisis Masalah
Analisa dan perancangan sebuah alat sangatlah penting. Hal ini bertujuan agar alat yang diciptakan dapat bekerja secara optimal sesuai dengan harapan, selain itu juga untuk mengurangi kesalahan dalam proses perancangan serta untuk bahan pertimbangan apabila terjadi masalah setelah alat tercipta. Analisis yang di buat untuk simulasi pada robot penghisap debu secara otomatis ini dapat di kendalikan dengan membaca adanya sensor penghalang yang tertancap pada bagian depan robot , robot penghindar halangan ini dikendalikan dengan membaca adanya sensor penghalang (ultrasonik), kemudian sensor tersebut.
Dari analisa sistem diatas maka penulis mempunyai gagasan atau ide untuk merancang suatu rangkaian interface yang berjudul ”Rancang Bangun Prototype Robot Avoider Penghisap Debu Otomatis Berbasis Arduino”. Analisa dalam perancangan alat ini meliputi analisis kebutuhan alat sebagai berikut.
3.2. Kebutuhan Perangkat Keras
Untuk realisasi prototype robot penghisap debu dengan menggunakan mikrokontroler Arduino ini diperlukan beberapa perangkat keras sebagai komponennya diantaranya sebagai berikut : a. Alat
1) Bor Listrik
Bor listrik digunakan untuk membuat lubang baik lubang pada PCB maupun untuk membuat lubang padaacrylic.
2) Tang
Tang berfungsi untuk memotong kabel atau kaki-kaki komponen yang disolder sedangkan tang jepit untuk mengambil dan membengkokkan komponen atau kabel. 3) Solder
Solder adalah alat atau pemanas yang digunakan untuk memanaskan timah pada proses pemasangan komponen ke PCB. sosial, jenis gangguan bahasa dan komunikasi, jenis gangguan motorik kasar dan jenis gangguan presepsi sensor.
4) Obeng
5) Kabel Usb
Kabel Usb digunakan untuk menangani upload progam dari komputer.
6) Mur dan baut
Digunakan untuk mengencangkan antara rangkaian PCB maupunacrylic.
b. Bahan
1. Elektromaknetik a) Arduino Uno
Sebagai papan sirkuit berbasis mikrokontroler Atmega328, untuk mensupport mikrokontroler secara mduah terhubung dengan kabel power USB atau kabel power supply adaptor AC ke DC atau juga battery.
b) Sensor Ultrasonik (HC-SR04)
Sebagai sensor penghalang, digunakan untuk mendeteksi dan menghindari halangan yang berada didepan robot.
c) Driver Motor
Sebagai salah satu komponen utama motor yang diperlukan untuk menggerakan robot d) Gear Box (Roda)
Sebagai roda supaya robot dapat berjalan. e) Resistor
komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian berada pada kipas.
f) PCB
Sebagai tempat untuk merangkai terminal pada robot. b. Akrilik (acrylic)
Bahan plastik yang menyerupai mika, berfungsi sebagai penempatan komponen-komponen pada robot,seperti mikrokontroler, terminal, dan driver motor.
g) Kabel Jumper
Sebagai sumber penghubung antar komponen pada robot yang berfungsi untuk membantu pengolahan mikrokontroler arduino pada robot supaya robot dapat bergerak.
h) Kipas
Sebagai salah satu komponen protoyipe untuk menghisap debu.
IV. HASIL DAN PEMBAHASAN
4.1. Perancangan Perangkat Keras
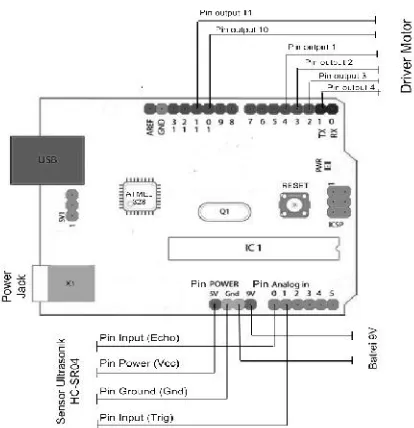
Rangkaian Terminal digunakan sebagai pin penghubung input/output pada sensor, mikrokontroler arduino, sumber daya, dan driver motor. Adapun gambar skema untuk rangkaian terminal dapat dilihat pada gambar 1.
Gambar 1. Rangkaian Terminal Rangkaian Kipas digunakan untuk prototype penghisap debu. Adapun gambar skema untuk rangkaian kipas dapat dilihat pada gambar 2.
Gambar 2. Rangkaian Kipas
Rangkaian sensor ultrasonik digunakan untuk pemancar dan penerima gelombang ultrasonik. Adapun gambar skema untuk rangkaian sensor penghalang (ultrasonik) dapat dilihat pada gambar 3.
Gambar 3 Rangkaian Sensor Ultrasonik HC-SR04
Gambar 4. Rangkaian Pin Arduino Uno Motor listrik digunakan sebagai penggerak agar robot dapat berjalan maju. Adapun skema dari rangkaian driver motor listrik dapat dilihat pada gambar 5.
Gambar 5 Rangkaian Pin Driver Motor DC IC L293
4.2. Hasil Dan Pengujian Alat
Adapun langkah-langkah pada pengujian alat adalah sebagai berikut:
a) Siapkan gambar skema rangkaian, tentukan titik pengukuran.
b) Gunakan voltmeter untuk mengukur tegangan pada titik pengukuran, catat hasilnya pada tabel.
c) Buat kesimpulan dari hasil pengujian alat. Sensor penghalang berfungsi untuk mendeteksi penghalang (jalur) sehingga dapat dibaca dan robot dapat bergerak maju sesuai dengan instruksi yang diberikan. Adapun hasil pengujian sensor penghalang
adalah sebagai berikut dapat dilihat pada gambar 6.
Gambar 6 Sensor Penghalang Tabel 1 Tabel Pengujian Tegangan Sensor
Penghalang Kondisi Sensor
Penghalang
Tegangan Keluaran Sensor Penghalang
Membaca penghalang 4,51 Volt
Tidak membaca penghalang 2,05 Volt
Berdasarkan dari hasil pengujian sensor penghalang maka dapat ditarik kesimpulan bahwa ketika robot dihidupkan maka sensor penghalang mengeluarkan tegangan output sebesar 4,51Volt yang digunakan untuk membaca halangan, ketika sensor tidak membaca halangan yang berada didepan maka tegangan yang dikelaurkan sesnsor sebesar 2,05Volt.
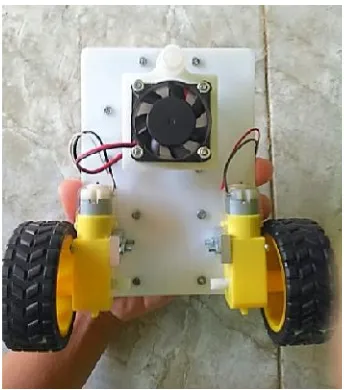
Robot yang telah dibuat perlu diuji sehingga dapat diketahui kinerja dari robot dan tingkat kestabilan gerak jika robot telah menerima instruksi. Adapun hasil pengujian dapat dilihat pada gambar 7 sampai 9.
Penjelasan gambar 7 kipas menyala robot bergerak maju dan mendeteksi lintasan, dimana lantai tersebut terdapat tembok / penghalang didepanya dan debu-debu kecil seperti debu rokok, kipas dan penyaring yang berada dibawah robot difungsikan sebagai prototype penghisap debu. Setelah menjumpai halangan sensor mendeteksi kemudian robot berbelok kekanan dimana roda sebelah kanan mundur dan roda sebelah kiri robot diam.
Gambar 8. Pengujian Belok Kanan Penjelasan gambar 8 Kemudian setelah robot berbelok kekanan, robot akan melanjutkan untuk bergerak maju dengan kipas menyala dan apabila tidak ada halangan maka robot dapat bergerak lurus.
Tabel 2 Tabel Pengujian Jarak Sensor Pengujian
Pada Sensor
Jarak Terbaca
Keterangan
if (cm <=2) cm Tidak terbaca
Jika sensor bertemu kurang dari/sama dengan 2cm
if (cm <=5) cm 5 cm Jika sensor bertemu kurang dari/sama dengan 5cm
Berdasarkan dari hasil pengujian akhir maka dapat ditarik kesimpulan bahwa jarak kepekaan sensor lakan lebih peka apabila mempunyai jarak kurang dari 5cm ketika mendekati halangan, dan sensor akan memiliki kepekaan yang lebih kecil apabila jarak kurang dari 2cm.
Gambar 9 Pengujian Kipas dan Penyaring Debu
Penjelasan gambar 9 Setelah robot berjalan dan menghindari halangan untuk menghisap debu, maka matikan robot kemudian kipas dan penyaring debu yang berada di bawah robot dilepas untuk mengetahui apakah debu dari rokok yang berada pada lantai tadi sudah tersedot oleh kipas dan penyaring.
V. KESIMPULAN
Berdasarkan dari hasil perancangan dan pengujian alat, maka dapat ditarik kesimpulan sebagai berikut :
a. Dari hasil perancangan dan implementasi robot yang dibuat menggunakan alat Mikrokontroler Arduino, sensor HC-SR04dan Driver Motor ini mampu menghindari halangan yang berada didepanseperti dinding.
DAFTAR PUSTAKA
Arifianto, 2011, Belajar Dasar Elektronika. Yogyakarta : Gava Media.
Banzi, Massimo. 2008. Getting Started With Arduino. USA : O’Reilly Media, Inc. Budiharto, Widodo. 2006. Membuat Robot Cerdas, Jakarta : PT. Elex Media Komputindo.
Dian, Artanto. 2008. Interaksi Arduino dan lab VIEW, Jakarta : Elex Media Komputindo.
Haryansyah F. 2010. Robot Pnegindar Halangan Dengan Mikrokontroler AT89C51. Jawa Timur : Universitas Pembangunan Nasional “Veteran”. Http://arduino.cc/en/Main/Software.
Http://dokumen.tips/documents/sekilas-tentang-robot-avoider.html
Https://id.wikipedia.org/wiki/Penghisap _debu
https://id.wikipedia.org/wiki/Purwarupa Https://irnawt.wordpress.com/2010/12/14/per
bedaan-system-life-cycle-slc-dengan-system-development-life-cycle-sdlc/ Http://www.elangsakti.com/2015/05/se nsor-ultrasonik.html
Jogiyanto, 1990. Analisis dan Desain Sistem Informasi, Yogyakarta : Andi Offset. Marindani, D Elang. 2012. Robot Mobile
Penghindar Halangan (Avoider Moibile Robot) Berbasis Mikrokontroler AT89S51, Pontianak Tenggara Kalimantan Barat : Universitas Tanjungpura.
Naurina. 2009. Rancang Bangun Robot Beroda Penghindar Halangan.Depok : Fakultas Teknik Universitas Indonesia Departemen Teknik Elektro.
Salman. 2009 . Sejarah dan Perkembangan Robot, Bandung : SukaRobot. Rusmadi, Dedy. 1995. Mengenal Komponen Elektronika. Bandung: Pionir Jaya. Wirawan Sumbodo. (2008). Teknik Produksi
Mesin Industri. Jakarta: Direktorat Pembinaan Sekolah Menengah Kejuruan.