Miniatur Smart Lift
Putri Mayang Sari1, Jupri Yanda Zaira2 & Syahrizal3
1,2,3
Program Studi Teknik Mekatronika, Politeknik Caltex Riau E-Mail: putrimygsari21@yahoo.com, j u p r i @ pc r . a c . i d, i ja l @ pc r . a c . i d
Abstrak
Smart lift (parking lift) dibuat untuk memudahkan pengemudi menemukan tempat parkir yang kosong. Smart lift ini diaplikasikan pada gedung-gedung bertingkat seperti mall, hotel, apartement, rumah sakit, dll. Untuk memperagakan mekanisme dan unjuk kerja sistem smart parking lift, telah dibuat sebuah miniatur smart parking. Pada miniatur ini, kontrol lift menggunakan PLC (Programmable Logic Controller). Ruangan dilengkapi dengan sensor pada setiap tempat parkirnya. Jika semua sensor aktif, berarti tempat parkir pada ruangan tersebut sudah penuh. Selanjutnya lift akan mengangkat mobil ke ruangan lain yang tempat parkirnya masih kosong. Lift ini bekerja sesuai urutan prioritas mulai dari lantai 1, dilanjutkan ke lantai 2, lalu ke lantai 3. Dari hasil yang telah didapat, Miniatur Smart Lift ini dapat menampung 12 mobil. Input dan output yang ada pada PLC terbaca dengan baik kecuali sensor LDR. Sensor ini hanya berfungsi dengan baik sebesar 53,3%. Sesuai dengan percobaan yang telah dilakukan, tegangan ideal miniatur smart lift ini untuk mengangkat beban adalah 6V-9V. Kelancaran pergerakan lift dari bawah ke atas adalah 79,58% sedangkan pergerakan lift dari atas ke bawah adalah 53,33%. Waktu tempuh rata-rata paling cepat untuk miniatur smart lift ini adalah 2,115s yaitu dari lantai 2 ke lantai 1 pada lift kiri dan untuk waktu tempuh rata-rata paling lama adalah 7,51s yaitu dari lantai 1 ke lantai 3 pada lift kanan
Kata kunci: Sensor cahaya, PLC, parking, lift, miniature. Abstract
Smart elevator (lift parking) is to facilitate the driver find an empty parking space. Smart elevators are used in high-rise buildings such as malls, hotels, apartments, hospitals, etc. To demonstrate the mechanism and performance of smart parking lift systems, has created a miniature smart parking. In this miniature, elevator control using a PLC (Programmable Logic Controller). The room is equipped with a sensor at every parking spot. If all sensor activated, it means that the parking lot on the room is full. Furthermore, the lift will take the car to another room that the parking lot was empty. Lift works in order of priority starting from the 1st floor, proceed to the 2nd floor, then to the 3rd floor. From the results obtained, Miniature Smart Lift can accommodate 12 cars. Input and output for PLC read properly except LDR. These sensors work properly only by 53.3%. In accordance with the experiments that have been done, the ideal voltage miniature smart elevator to lift the load is 6V-9V. The smooth movement of the elevator from bottom to top was 79.58%, while the movement of the elevator from top to bottom is 53.33%. The average travel time for a miniature smart fastest lift is 2.115 s, from the 2nd floor to the 1st floor to the left and to lift the average travel time is 7.51 s later than that from the 1st floor to the 3rd floor to the right of the elevator.
Keywords: Light Sensor, PLC, parking, lift, miniature. 1 Pendahuluan
Lift adalah seperangkat alat yang digunakan untuk mengangkut manusia atau barang secara vertikal dengan menggunakan seperangkat alat mekanik baik disertai alat otomatis ataupun manual. Sistem pengendali lift memang berperan sangat penting dalam menentukan berfungsi atau tidaknya kerja lift.
Di sini akan dirancang sebuah miniatur sebagai alat peraga yang berfungsi sama seperti lift yang sebenarnya, yang digunakan pada gedung-gedung bertingkat. Perancangan ini akan memudahkan kita dalam memahami bagaimana sistem kerja dan pengendalian lift. Tidak seperti lift biasa, lift ini adalah Smart Lift yang dibuat khusus mobil (mobil berskala kecil/mobil
pribadi). Lift ini dibuat guna memperhemat lahan serta memanfaatkan teknologi yang ada saat ini. Dibuatnya smartlift ini juga untuk keamanan. Di gedung-gedung bertingkat khusunya di indonesia, untuk menuju tempat parkir di lantai atas memerlukan jalan menanjak, bukan lift. Kebanyakan orang mengalami kecelakaan di sini. Faktornya adalah tanjakan terlalu tinggi, berhentinya mobil di tengah tanjakan karena tidak mampu mengendarai mobil dengan baik di tanjakan tinggi sehingga terjadi kemacetan di sepanjang tanjakan yang membuat tabrakan kecil. Dengan lift ini, hal itu tidak akan terjadi karena pengemudi hanya perlu masuk ke dalam lift, menunggu ke mana lift akan berhenti, lalu siap untuk memarkirkan mobil ketika lift tersebut berhenti dan pintu terbuka. Hal ini menunjukan bahwa smart lift lebih efektif dan lebih aman dibandingkan dengan jalan menanjak. Lift akan mengangkat mobil dan membawanya ke lantai mana yang tempat parkirnya masih kosong dengan prioritas pengisian dari lantai 1, lantai 2, dan lantai 3.
Saat ini, smart lift sudah dibangun di beberapa negara seperti Jepang, Korea, Belanda, dll. Smart lift yang mereka bangun bermacam-macam jenisnya. Ada yang menggunakan sistem pergerakan kincir angin, ada juga yang mengaplikasikannya ke gedung tinggi, tetapi hanya untuk mobil (gudang penyimpanan mobil), dan ada juga yang menggunakan sistem conveyor. Smart lift ini hanya bisa digunakan untuk mobil pribadi yang ukurannya tidak terlalu besar.
Gambar 1 Smart Lift di Korea dan Eropa.
2 Metodologi
2.1 Perancangan Sistem
Prinsip kerja dari miniatur smart lift ini yaitu ketika tombol On ditekan secara manual, maka seluruh rangkaian elektronika dan PLC (Programmable Logic Controller) akan aktif. Untuk membuat lift pada miniatur smart lift ini dapat digunakan oleh pengemudi, sensor untuk pemberhentian lift di lantai 1 dan tempat parkir pada lantai 1 harus penuh terlebih dahulu. Masing-masing outputnya harus berlogika 1. Setelah keduanya aktif, pintu gedung secara otomatis akan terbuka. Hal ini menandakan bahwa lift sudah bisa digunakan, tepatnya seperti indikator. Ketika pengemudi sudah memasukkan mobilnya ke dalam lift, pengemudi harus menekan tombol ready untuk proses selanjutnya. Ketika tombol ready ditekan, pintu gedung yang tadinya terbuka akan tertutup. Sesaat setelah pintu tertutup, lift akan bergerak ke lantai 2. Lift akan berhenti di lantai 2 apabila sensor di lantai 2 untuk batas pemberhentian lift aktif. Di saat yang bersamaan, pintu di lantai 2 akan terbuka dan mobil bisa dikeluarkan dan segera diparkirkan di tempat yang diinginkan. Lift akan turun secara otomatis setelah pintu di lantai 2 tertutup setelah sensor di lantai 2 (terletak di depan pintu) tertekan oleh mobil. Begitulah proses seterusnya. Seperti yang sudah dikatakan sebelumnya, miniatur smart lift ini memprioritaskan pengisian tempat parkir di lantai 1 terlebih dahulu. Setelah itu dilanjutkan dengan dengan pengisian di lantai 2, lalu pengisian di lantai 3. Lift tidak akan bisa digunakan apabila tempat parkir sudah penuh.
Untuk pengemudi yang hendak keluar dari gedung juga menggunakan smart lift sebagai sarana, kecuali mobil yang terparkir di lantai 1. Pengemudi harus menempatkan mobilnya di depan lift dengan pembatas yang telah di tunjukan. Di sini terdapat sebuah sensor yang akan membuat lift datang ke tempat tersebut sehingga pengemudi dapat menggunakan lift untuk keluar. Semua proses akan diatur oleh program yang sudah dibuat pada PLC (Programmable Logic Controller).
2.2 Perancangan Elektronik
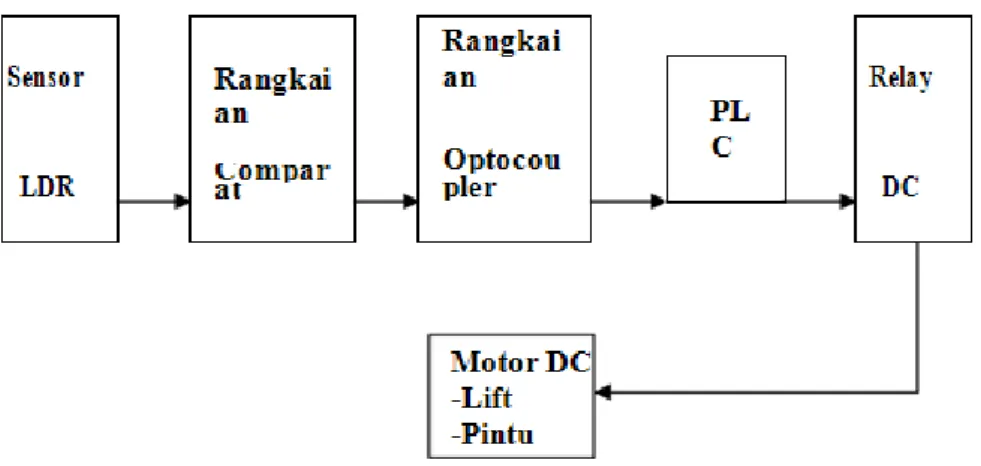
Secara keseluruhan rangakaian yang digunakan dapat dilihat pada blok diagram pada gambar 2.
Gambar 2 Blog Diagram Rangkaian.
3 Hasil dan Pembahasan
3.1 Pengujian Variasi Tegangan Terhadap Waktu 3.1.1 Pergerakan dari lantai 1-2
Tabel 1 Data tegangan terhadap waktu, dari lift 1-2.
Supply Tegangan Motor Waktu Rata-rata (s)
4,5 V 7,25 6 V 5 9 V 3,35 12 V 2,40 Total 18 Rata-rata 4,5
Dari data yang ada, dapat kita lihat bahwa semakin kecil supply tegangan motor, maka semakin lambat lift bergerak ke lantai berikutnya. Sebaliknya, semakin besar supply tegangan motor, maka semakin cepat lift bergerak. Hal ini dikarenakan perputaran medan magnet akan semakin cepat bila tegangan yang diberikan tinggi. Data waktu tempuh di atas diambil dari rata-rata setiap variasi tegangan. Dilakukan sepuluh kali percobaan untuk mendapatkan data tersebut.
3.1.2 Pergerakan dari lantai 2-3
Tabel 2 Data tegangan terhadap waktu, dari lift 2-3.
Supply Tegangan Motor Waktu Rata-rata (s)
4,5 V 5,29 6 V 3,88 9 V 2,73 12 V 1,84 Total 13,74 Rata-rata 3,435
Dari data yang telah didapat, sama dengan analisa data sebelumnya, semakin tinggi tegangan motor maka semakin cepat pergerakan lift ke lantai berikutnya. Terdapat perbedaan waktu angkat dari data sebelumnya karena jarak dari lantai 2 ke lantai 3 berbeda dari jarak lantai 1 ke lantai 2 yaitu 30 cm (jarak dari lantai 2 ke lantai 3). Dilakukan sepuluh kali percobaan untuk mendapatkan data. Waktu tempuh yang didapat dari sepuluh kali percobaan tersebut merupakan waktu rata-rata untuk setiap perbedaan variasi tegangan.
3.1.3 Pergerakan dari lantai 1-3
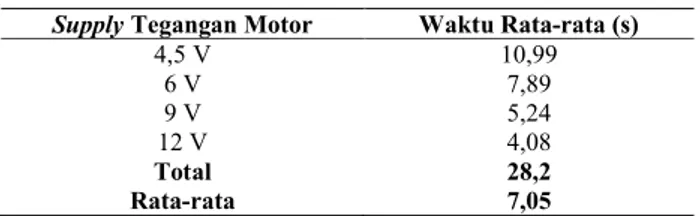
Tabel 3 Data tegangan terhadap waktu, dari lift 1-3.
Supply Tegangan Motor Waktu Rata-rata (s)
4,5 V 10,99 6 V 7,89 9 V 5,24 12 V 4,08 Total 28,2 Rata-rata 7,05
Dari data yang ada, dapat diketahui bahwa waktu yang dibutuhkan lift dari lantai 1 menuju lantai 3 lebih lama, karena jarak tempuh juga lebih besar yaitu 55,5 cm. Sama dengan kasus sebelumnya, jika tegangan yang diberikan tinggi, maka perputaran motor yang mengangkat lift semakin cepat, sebaliknya, jika tegangan yang diberikan kecil, maka pergerakan motor saat mengangkat lift ke lantai berikutnya akan semakin lama atau lambat.
3.1.4 Pergerakan dari lantai 2-1
Tabel 4 Data tegangan terhadap waktu, dari lift 2-1.
Supply Tegangan Motor Waktu Rata-rata (s)
4,5 V 3,16 6 V 2,52 9 V 1,51 12 V 1,27 Total 8,46 Rata-rata 2,115
Waktu dari lantai 1 ke lantai 2 dengan dari lantai 2 ke lantai 1 sangat jauh berbeda, karena pada saat pergerakan dari lantai 1 ke lantai 2 dipengaruhi oleh beban yang berlawanan
dengan arah pergerakan motor. Pada saat pergerakan lift dari lantai 2 ke lantai 1, beban justru membantu pergerakan motor.
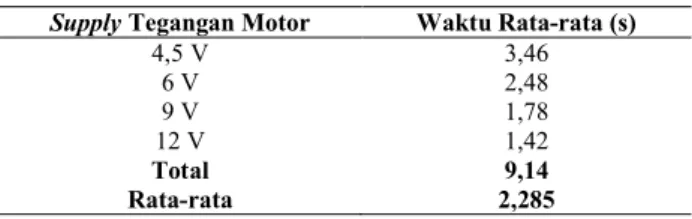
3.1.5 Pergerakan dari lantai 3-2
Tabel 5 Data tegangan terhadap waktu, dari lift 3-2.
Supply Tegangan Motor Waktu Rata-rata (s)
4,5 V 3,46 6 V 2,48 9 V 1,78 12 V 1,42 Total 9,14 Rata-rata 2,285
Dari data yang ada, dapat dianalisa bahwa waktu yang dibutuhkan oleh lift dari lantai 3 ke lantai 2 lebih lama dibandingkan dari pergerakan lift dari lantai 2 ke lantai 1, karena jarak antara lantai 3 ke lantai 2 lebih besar yaitu 30 cm dibandingkan dari lantai 2 ke lantai 1 yang hanya 25,5 cm. Perbedaan waktu dari lantai 2 ke lantai 3 dengan dari lantai 3 ke lantai 2 sangat jauh berbeda, karena pada saat pergerakan dari lantai 2 ke lantai 3 dipengaruhi oleh beban yang berlawanan dengan arah pergerakan motor. Pada saat pergerakan lift dari lantai 3 ke lantai 2, beban justru membantu pergerakan motor. Dari data yang telah didapat, maka diketahui bahwa semakin tinggi tegangan yang diberikan, maka semakin cepat pergerakan lift menuju lantai berikutnya, dan sebaliknya.
3.1.6 Pergerakan dari lantai 3-1
Tabel 6 Data tegangan terhadap waktu, dari lift 3-1.
Supply Tegangan Motor Waktu Rata-rata (s)
4,5 V 6,94 6 V 5,15 9 V 3,52 12 V 2,54 Total 18,15 Rata-rata 4,5375
Dari data yang ada, dapat dianalisa bahwa waktu yang dibutuhkan lift dari lantai 3 menuju lantai 1 lebih cepat dari pada pergerakan lift dari lantai 1 ke lantai 3. Hal ini terjadi karena pada saat mobil diangkat dari lantai 1 menuju lantai 3 berlawanan arah dengan perputaran motor. Saat pergerakan lift dari lantai 3 ke lantai 1, perputaran motor terbantu oleh gaya berat benda/beban oleh mobil, sehingga jalannya lebih cepat.
3.2 Pengujian Kelancaran Pergerakan Lift
Pada saat pengujian, dilakukan 10 kali pengambilan data variasi tegangan terhadap kelancaran pergerakan lift. Hasil data yang didapat dinyatakan dalam bentuk berikut:
70% - 90% = Lift bergerak kurang lacar, kemungkinan tersangkut “ada”. 90% - 100% = Lift bergerak lancar, kemungkinan tersangkut “tidak ada”.
Tabel 7 Data Kelancaran Lift Naik
Pergerakan Tegangan (V)
4,5 6 9 12
Naik (Lift Kiri)
Lt 1-2 80% 90% 90% 70%
Lt 2-3 90% 90% 90% 90%
Lt 1-3 70% 90% 70% 70%
Naik (Lift Kanan)
Lt 1-2 70% 70% 70% 70%
Lt 2-3 90% 90% 90% 90%
Lt 1-3 70% 70% 70% 70%
Total 470% 500% 480% 460%
Rata-rata 78,3% 83,3% 80% 76,6%
Dari data yang telah didapat, tegangan yang sebaiknya diberikan untuk penggerak lift adalah 6V-9V. Hasil yang telah dicapai pada tegangan ini berkisar antara 80% hingga 83,3%. Pergerakan lift tidak dapat mencapai nilai sempurna yaitu 100% karena faktor mekanik. Alur lift yang dibuat kurang presisi dan akurasi, sehingga kadang lift tersangkut saat digerakan.
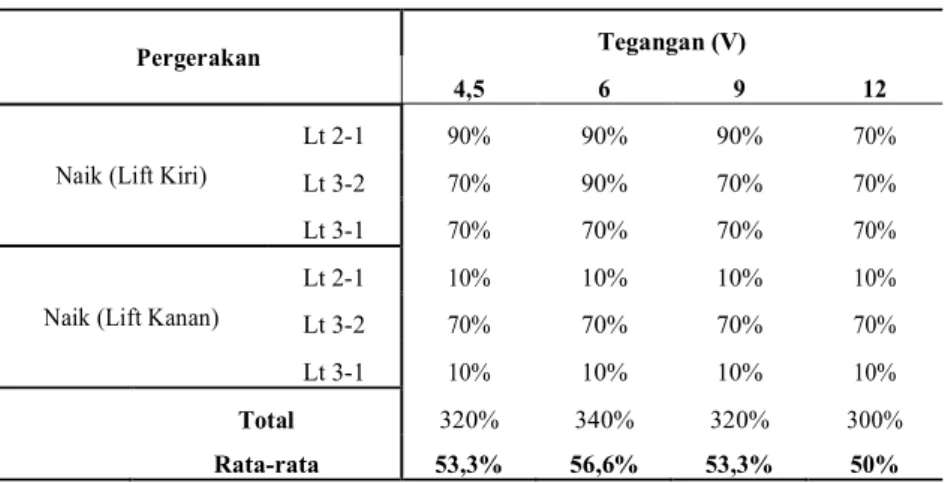
Tabel 8 Data Kelancaran Lift Turun.
Pergerakan Tegangan (V)
4,5 6 9 12
Naik (Lift Kiri)
Lt 2-1 90% 90% 90% 70%
Lt 3-2 70% 90% 70% 70%
Lt 3-1 70% 70% 70% 70%
Naik (Lift Kanan)
Lt 2-1 10% 10% 10% 10%
Lt 3-2 70% 70% 70% 70%
Lt 3-1 10% 10% 10% 10%
Total 320% 340% 320% 300%
Rata-rata 53,3% 56,6% 53,3% 50%
Dari data yang telah didapat pada saat pergerakan lift turun ini, terjadi error yang besar di setiap variasi tegangan, yaitu saat lift menuju dari lantai 2 ke lantai 1 dan saat lift menuju dari lantai 3 ke lantai 1. Hal ini disebabkan oleh alur yang sempit antara lantai 1 dan lantai 2, sehingga pergerakan lift tidah lancar saat percobaan dilakukan. Untuk hasil keseluruhan pergerakan lift turun ini, tegangan supply penggerak lift dengan persentase paling besar adalah 6V.
3.3 Pengujian Kasus-Kasus Pada PLC
Tabel 9 Data Kelancaran Lift Turun
No. Kasus Hasil
1 Lift naik dari lantai 1 ke Lantai 2 100% 2 Lift naik dari lantai 2 ke Lantai 3 100% 3 Lift naik dari lantai 1 ke Lantai 3 100% 4 Lift turun dari lantai 2 ke Lantai 1 100% 5 Lift turun dari lantai 3 ke Lantai 2 100% 6 Lift turun dari lantai 3 ke Lantai 1 100%
7 Pintu di lantai 1 terbuka 100%
8 Pintu di lantai 1 tertutup 100%
9 Pintu di lantai 2 terbuka 100%
10 Pintu di lantai 2 tertutup 100%
11 Pintu di lantai 3 terbuka 100%
12 Pintu di lantai 3 tertutup 100%
13 Lift berhenti di lantai 1 100%
14 Lift berhenti di lantai 2 100%
15 Lift berhenti di lantai 3 100%
16 Limit switch lantai 1 penuh 100%
17 Limit switch lantai 2 Penuh 100%
18 Limit switch lantai 3 Penuh 100%
Pada saat pengujian pada program dengan menggunakan Twidosuite, input dan output terbaca dengan baik. Input yang saling berkesinambungan mampu membuat output terbaca dengan sempurna. Penggunaan timer untuk delay/ mengatur lamanya output aktif juga berfungsi dengan baik sesuai dengan yang diharapkan.
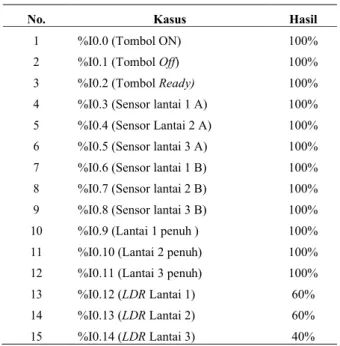
3.4 Pengujian Input Pada PLC
Kurang baiknya kerja sensor LDR pada pengujian ini dikarenakan optocoupler yang sering hangus karena terkadang tidak bisa menerima tegangan sebesar 24V. Berdasarkan datasheet, seharusnya optocoupler ini bisa menerima tegangan sampai 35V. Jika ternyata optocoupler hangus di tegangan 24V, ini menandakan bahwa komponen tidak asli. Tidak hanya optocoupler, tekadang LDR tidak terlalu sensitif terhadap cahaya laser yang diberikan. Maka dari itulah kadang input ke PLC sering tidak terbaca dengan baik.
Tabel 10 Data Kelancaran Lift Turun
No. Kasus Hasil
1 %I0.0 (Tombol ON) 100%
2 %I0.1 (Tombol Off) 100%
3 %I0.2 (Tombol Ready) 100%
4 %I0.3 (Sensor lantai 1 A) 100%
5 %I0.4 (Sensor Lantai 2 A) 100%
6 %I0.5 (Sensor lantai 3 A) 100%
7 %I0.6 (Sensor lantai 1 B) 100%
8 %I0.7 (Sensor lantai 2 B) 100%
9 %I0.8 (Sensor lantai 3 B) 100%
10 %I0.9 (Lantai 1 penuh ) 100%
11 %I0.10 (Lantai 2 penuh) 100%
12 %I0.11 (Lantai 3 penuh) 100%
13 %I0.12 (LDR Lantai 1) 60%
14 %I0.13 (LDR Lantai 2) 60%
15 %I0.14 (LDR Lantai 3) 40%
3.5 Pengujian Output Pada PLC
Tabel 11 Tabel Kelancaran Lift Turun
No. Kasus Hasil
1 %Q0.2 (Pintu Lt 1 terbuka) 100% 2 %Q0.3 (Pintu Lt 1 tertutup) 100% 3 %Q0.4 (Pintu Lt 2 terbuka) 100% 4 %Q0.5 (Pintu Lt 2 tertutup) 100% 5 %Q0.6 (Lift Naik) 100% 6 %Q0.7 (Lift Turun) 100% 7 %Q0.14 (Pintu Lt 3 terbuka) 100% 8 %Q0.14 (Pintu Lt 3 tertutup) 100%
3.6 Pengujian Keseluruhan Sistem
PB ON ditekan (%I0.0) untuk menjalankan sistem keseluruhan.
1. Pintu gedung lantai 1 terbuka (%Q0.2) jika sensor yang menandakan tempat parkir di lantai 1 penuh (%I0.9) dan LDR batas pemberhentian lift di lantai 1 (%I0.12) aktif. Hasil/Analisa: Pada tahap ini, kerja smart lift sesuai dengan yang diharapkan. Sesaat setelah kedua sensor aktif, pintu langsung terbuka sehingga pengemudi dapat memasukan mobilnya ke dalam lift.
2. Pintu gedung lantai 1 tertutup (%Q0.3) dan lift naik (%Q0.6) jika tombol ready (%I0.2) ditekan. Hasil/Analisa: Pada tahap ini, kerja smart lift sesuai dengan yang diharapkan. Sesaat setelah tombol ready ditekan, pintu lantai 1 tertutup dan lift naik.
3. Lift Berhenti di lantai 2 jika LDR lantai 2 (%I0.13) aktif. Hasil/Analisa: Pada tahap ini, kerja smart lift terkadang tidak sesuai dengan yang diharapkan. Hal ini bergantung pada input sensor LDR pada lantai 2. Perubahan tegangan yang disebabkan oleh kurang sensitifnya sensor serta kerusakan optocoupler menjadi faktor utama yang menyebabkan tidak lancarnya proses pada tahap ini. Seperti yang sudah disebutkan di halaman sebelumnya, optocoupler sering hangus karena tidak bisa menerima tegangan 24V (berdasarkan datasheet, optocoupler dapat menerima tegangan hingga 35V). Maka dari itu, optocoupler harus selalu diganti dengan yang baru jika sudah hangus. Faktor kedua adalah LDR yang kurang sensitif terhadap cahaya laser yang diberikan.
4. Pintu lantai 2 terbuka (%Q0.4) beberapa detik setelah lift berhenti. Hasil/Analisa: Pada tahap ini, pintu akan terbuka jika lift berhenti. Ini menandakan bahwa proses ini sangat bergantung pada proses sebelumnya. Jika lift tidak bisa berhenti, maka pintu tidak akan terbuka. Saat percobaan, proses ini kadang bisa bekerja dengan baik dan kadang bisa juga tidak berhasil. Tergantung pada sensor yang memberhentikan lift di lantai 2.
5. Pintu lantai 2 tertutup (%Q0.5) dan lift turun (%Q0.7) jika sensor lantai 2 A (%I0.4) aktif. Hasil/Analisa: Pada tahap ini, saat sensor lantai 2 A aktif, pintu lantai 2 bisa tertutup dengan baik dan lift juga bisa turun ke lantai 1. Ada masalah yang terjadi saat lift bergerak turun, yaitu tidak lancar. Hal ini disebabkan oleh mekanik yang kurang presisi dan akurasi sehingga lift sering tersangkut di jalur yang telah dibuat. Butuh tenaga manual agar lift tidak tersangkut.
6. Lift berhenti di lantai 1 jika sensor LDR padai lantai 1 (%I0.12) tersebut aktif. Hasil/Analisa: Pada tahap ini, hal yang sama terjadi pada saat lift berhenti di lantai 2 (pada keterangan “c”). Faktornya karena sensor LDR kurang sensitif dan atau optocoupler yang hangus.
7. Lift naik (%Q0.6) dan berhenti di lantai 3 jika sensor lantai 1 penuh (%I0.9) dan sensor lantai 2 penuh (%I0.10) aktif. Hasil/Analisa: Pada tahap ini, lift bisa naik ke lantai 3 tentunya dengan aktifasi sensor lantai 1 (%I0.12) dan tombol ready (%I0.2) terlebih dahulu. Tetapi, sama halnya dengan kasus sensor LDR sebelumnya. Faktor kurang sensitifnya LDR dan atau optocoupler yang hangus membuat proses ini kurang lancar. Kebanyakan dari percobaan yang saya lakukan pada tahap ini kurang berhasil.
8. Ada mobil yang hendak keluar dari lantai 2 ke lantai 1. Hasil/Analisa: Pada tahap ini, posisi mobil harus mengenai sensor lantai 2 B agar lift bisa bergerak menuju lantai 2. Setelah lift tiba di lantai 2, pintu akan terbuka, mobil masuk, tombol ready ditekan, lalu lift akan menuju ke lantai 1. Saat percobaan ini, jika dilihat dari program, smart lift berjalan dengan baik. Tetapi pada saat percobaan langsung, smart lift berjalan kurang baik karena masalah sensor LDR.
9. Ada mobil yang hendak keluar dari lantai 3 ke lantai 1. Hasil/Analisa: Pada tahap ini, prosesnya hampir sama dengan keterangan “h”. Hanya saja, sensor batas pemberhentian di lantai 2 (%I0.13) tidak akan menghambat gerak lift. Lift hanya akan berhenti apabila menghalangi cahaya pada sensor batas pemberhentian lantai 1 (%I0.12). Pada saat pengujian, sistem kontrol berjalan dengan baik, hanya saja gerak lift kurang lancar karena jalur antara lantai 2 dan lantai 1 sedikit menyempit, jadi harus menggunakan tenaga manual untuk melepaskannya.
4 Kesimpulan
Setelah melakukan pengujian dan analisa terhadap Proyek Akhir ini, maka dapat disimpulkan bahwa:
1. Kelancaran pergerakan lift sewaktu mengangkut mobil dari lantai bawah ke lantai atas adalah 79,58%.
2. Kelancaran pergerakan lift sewaktu mengangkut mobil dari lantai atas ke lantai bawah adalah 53,33%.
3. Waktu tempuh rata-rata lift paling lama saat mengangkut mobil adalah 7,51 s. 4. Waktu tempuh rata-rata lift paling cepat saat mengangkut mobil adalah 2,115 s.
5. Sensor LDR tidak berfungsi dengan baik. Dari data yang telah dicapai, rata-rata keberhasilan kerja LDR adalah 53,3 %.
6. Tegangan supply yang baik digunakan untuk miniatur smart lift adalah 6V-9V.
Daftar Pustaka
[1] Suhendro,Budi. Satrio Wibowo, dan Suyamto. SimulatorKendaliLift.Diakses pada 28Desember 2011 http://203.190.115.66/prosidingsttn/2010 /31.pdf
[2] Husanto, Thomas ST.,MT. 2007. PLC (Programmable Logic Controller). Penerbit Andi:Yogyakarta.
[3] _________________, Optocoupler.Diakses pada 16 Agustus 2010 http://en.wikipedia.org/wiki/Opto-isolator
[4] _________________, MotorWiper.Diakses pada 12 Januari 2012 http://otospider.com/konstruksi-motor-wiper.html
[5] Supatmi, Sri. LDR (Light Dependent Resistor).Diakses pada 28 Desember 2011.http://jurnal.unikom.ac.id/_s/data/j urnal/v08-n02/volume-82-artikel5.pdf/pdf /volume-82-artikel-5.pdf
[6] Haryono, Nono. LimitSwitch. Diakses pada 28 Desember 2011 http://otosensing.blogspot.com/2010/09/ limit-switch.html