1.
1. Melakukan Melakukan kalibrasi kalibrasi batang batang kendali reaktor kendali reaktor KARTINI, KARTINI, yaitu yaitu menentukan reaktivitasmenentukan reaktivitas batang
batang kendali kendali dengan dengan jalan jalan membuat membuat grafik grafik reaktivitas reaktivitas suatu suatu batang batang kendali kendali terhadapterhadap kedudukannya (grafik
kedudukannya (grafik versus h ) dan membuat grafikversus h ) dan membuat grafik h h versus versus h.h. 2.
2. Menghitung reaktivitas total ketiga elemen batang kendali di dalam reaktor.Menghitung reaktivitas total ketiga elemen batang kendali di dalam reaktor. 3.
3. Menghitung reaktivitas lebih teras reaktor.Menghitung reaktivitas lebih teras reaktor.
Di dalam
Di dalam teras reaktor KAteras reaktor KARTINI terdapat RTINI terdapat tiga buah batang tiga buah batang kendali, yaitu kendali, yaitu sebuahsebuah batang
batang kompensasi kompensasi (ditempatkan (ditempatkan di rindi ring C9), g C9), sebuah sebuah batang batang pengatur pengatur (di rin(di ring Eg E11) dan sebuah) dan sebuah batang
batang pengaman pengaman (di (di ring ring CC55). Batang ). Batang kendali tersebut kendali tersebut pada pada dasarnya berisi dasarnya berisi bahan-bahanbahan-bahan yang sangat kuat menyerap netron, dalam hal ini dipakai atom-atom boron (
yang sangat kuat menyerap netron, dalam hal ini dipakai atom-atom boron ( = 3837 barn).= 3837 barn).
Reaksi penyerapan antara boron dan netron dapat ditulis sbb: Reaksi penyerapan antara boron dan netron dapat ditulis sbb:
5 5 10 10 0 0 1 1 5 5 11 * 11 * 3 3 7 7 2 2 4 4 B B + + n n B B Li Li + + HHe e + 2+ 2,,773 3 MMeevv
Batang-batang kendali tersebut dimasukkan ke dalam teras reaktor melalui pipa-pipa Batang-batang kendali tersebut dimasukkan ke dalam teras reaktor melalui pipa-pipa pengarah
pengarah batang batang kendali. kendali. Pipa-pipa Pipa-pipa pengarah pengarah tersebut tersebut dari dari pipa pipa aluminum aluminum yang yang telahtelah dianodisasi.
dianodisasi. Besarnya kekuatan batang Besarnya kekuatan batang kendali di dalam kendali di dalam teras reaktor antara teras reaktor antara lain ditentukanlain ditentukan oleh letak/posisi batang kendali di dalam teras serta besar level daya reaktor yang oleh letak/posisi batang kendali di dalam teras serta besar level daya reaktor yang dibangkitkan dan ukuran teras
dibangkitkan dan ukuran teras reaktor, tampang lintang reaktor, tampang lintang serapan, temperatur dan lain-lain.serapan, temperatur dan lain-lain. Menurut persamaan per-jam (inhor-equation), nilai reaktivitas sebagai fungsi periode Menurut persamaan per-jam (inhor-equation), nilai reaktivitas sebagai fungsi periode reaktor adalah : reaktor adalah : = = + + TT ++ T T + + TT 1 1 + + TT ii ii i=1 i=1 6 6 (1)(1) Satuan reaktivitas
Satuan reaktivitas bermacam-macam yaitu : bermacam-macam yaitu : a. dalam persen (%) a. dalam persen (%) b. dalam dollar ($) b. dalam dollar ($) c. dalam per-jam. c. dalam per-jam.
Pada umumnya kita memperhitungkan harga
Pada umumnya kita memperhitungkan harga dalam dalam satuan satuan $ $ (dollar) (dollar) Harga Harga reaktivitasreaktivitas
dalam satuan dollar dalam satuan dollar adalah adalah ::
(2) (2) dengan ketentuan
dengan ketentuan
KALIBRASI BATANG KENDALI
KALIBRASI BATANG KENDALI
AA Tujuan Tujuan Percobaan Percobaan
B
B Dasar Dasar TeoriTeori
= = ( ( + + TT)) ++ T T ( ( + + TT)) 1 1 + + TT eeffff eeffff ii ii i= i= 11 6 6
T adalah periode reaktor
adalah umur generasi netron.
Periode reaktor didefinisikan sebagai selang waktu yang diperlukan untuk menaikkan daya reaktor sebesar e kalinya (e = 2,71828). Secara matematik dapat dituliskan sbb:
(t/T) exp = P(0) P(t) (3) dengan ketentuan
T adalah periode reaktor
P(t) dan P(0) masing masing adalah daya reaktor sesudah t detik dan daya reaktor pada saat awal.
Di dalam praktikum ditentukan P(t)/P0) sebesar 1,5 ataau 2 kemudian diukur waktu yang diperlukan untuk peningkatan daya tersebut.
Berdasarkan pada praktek pengukuran ini, periode reaktor dapat dihitung berdasarkan pada persamaan P(0) P(t) ln t = T (4) dengan ketentuan
t adalah waktu yang diperlukan untuk menaikkan daya reaktor 1,5x atau 2x.
Besaran menyatakan umur generasi netron yang didefinisikan sebagai umur netron sejak dilahirkan dari proses pembelahan sampai dengan diserap oleh nuklida di dalam material bahan bakar atau bocor keluar dari reaktor. Harga untuk reaktor KARTINI menurut dokumentasi General Atomik sebesar :
= 3,8999999. 10-5 detik.
eff adalah fraksi netron kasip dari U-235. Besarnya eff untuk reaktor KARTINI yang dikategorikan reaktor termal adalah:
eff = 6,999999 10-3
eff adalah gabungan 6 kelompok netron kasip yang terjadi di reaktor nuklir. Masing-masing kelompok netron kasip dan umur paronya dinyatakan dengan besaran i dan i dengan ketentuan, i adalah isotop penghasil netron kasip kelompoki sedangkan i adalah tetapan peluruhan isotop penghasil netron kasip kelompok i. Pada tabel (1) dapat dilihat nilai umur paro dan tetapan peluruhan kelompok nuklida penghasil netron kasip dari U-235.
Grup ( i ) umur paro (detik) tetapan peluruhan (i) = i / eff 1 55,72 0,0124 0,033 2 22,72 0,0305 0,219 3 6,22 0,1115 0,196 4 2,3 0,301 0,395 5 0,61 1,138 0,115 6 0,23 3,01 0,042
Tabel 1. Data kelompok nuklida penghasil netron kasip dari hasil pembelahan U-235
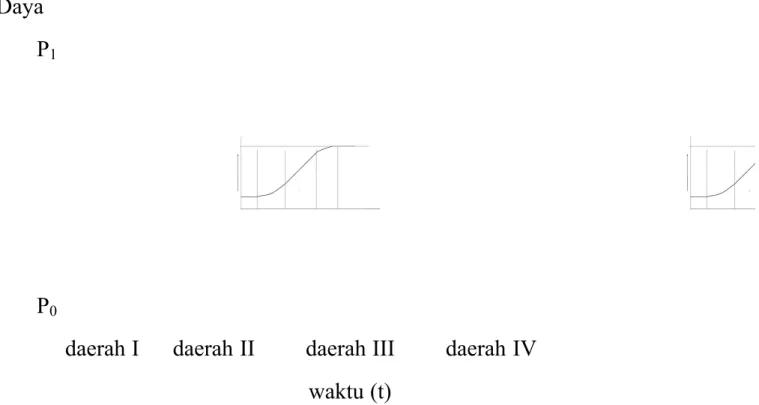
Apabila reaktor kritis pada daya P0 , kemudian salah satu batang kendali dinaikkan sehingga terjadi keadaan sedikit super kritis, maka kenaikan daya reaktor sebagai fungsi waktu seperti terlihat pada gambar 1.
Dari gambar 1.dapat diterangkan bahwa daerah 1, adalah daerah dimana reaktor dioperasikan pada daya tetap P0, sedangkan daerah II adalah daerah perpindahan naik yaitu kejadian ketika batang kendali dinaikkan sebesarh . tampak bahwa pada keadaan ini terjadi percepatan perubahan daya pada saat kenaikan batang kendali sebesarh. Pada keadaan ini tidak diperbolehkan mengukur periode T atau waktu 1,5 kali atau 2 kalinya. Pada daerah III tampak bahwa daya reaktor naik dengan periode mendekati stabil. Pada daerah ini dilakukan pengukuran besar periode T atau waktu 1,5 kalinya atau waktu 2 kalinya. Daerah IV adalah daerah dimana reaktor naik mendekati daya asimtotnya, yaitu nilai daya yang baru setelah batang kendali dinaikkan sebesarh dan telah terjadi kesetimbangan reaktivitas di teras.
Daya P1
P0
daerah I daerah II daerah III daerah IV waktu (t)
Gambar 1. Kenaikan daya reaktor sebagai fungsi waktu (t) akibat ditariknya batang kendali keluarteras sebesar∆h.
Pada percobaan dilakukan pengukuran waktu 1,5 kali atau 2 kali, yaitu waktu antara daya mula-mula P0 sampai waktu ketika menunjukkan daya 1,5 P0 atau 2 P0. Pengukuran nilai waktu ini lebih praktis apabila dibandingkan dengan pengukuran secara langsung periode reaktor T
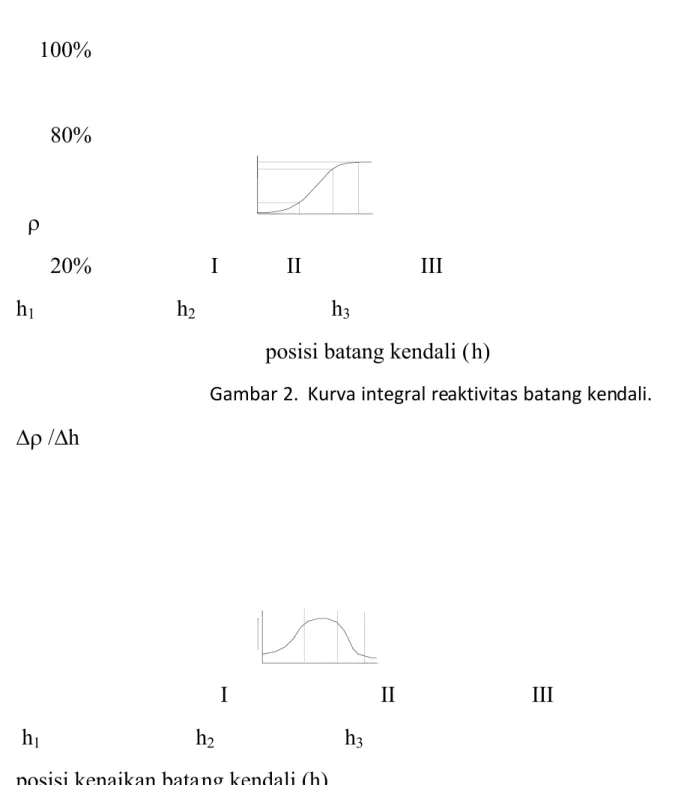
Nilai yang sesuai dengan waktu 1,5 kali atau 2 kali dapat dicari dengan menggunakan persamaan 2 atau dengan menggunakan tabel reaktivitas sebagai fungsi waktu 1,5 kali atau 2 kali yang tersedia. Apabila diketahui besarnya kenaikan posisi batang kendali (h) yang mengakibatkan timbulnya, dapat dibuat grafik reaktivitas versus posisi kenaikan batang kendali yang disebut sebagai kurva integral dan kurva versus h disebut sebagai
kurva diferensial. Kurva integral dan kurva diferensial dapat dilihat pada gambar 2 dan 3.
100%
80%
20% I II III
h1 h2 h3
posisi batang kendali (h)
Gambar 2. Kurva integral reaktivitas batang kendali.
h
I II III
h1 h2 h3
posisi kenaikan batang kendali (h)
Gambar 3. Kurva diferensial reaktivitas batang kendali
Dari kurva integral batang kendali dapat diketahui besarnya reaktivitas batang kendali, yaitu reaktivitas pada kedudukan batang kendali maksimum. Daerah linear batang kendali terletak
pada daerah II yaitu pada interval prosentase reaktivitas 20% << 80%, dimana kenaikan reaktivitas batang kendali relatif linear terhadap kenaikan posisinya. Reaktivitas total dari ketiga batang kendali merupakan jumlah dari reaktivitas ketiga batang kendali (pengaman, kompensasi dan pengatur). Untuk mendapatkan reaktivitas total tersebut, kurva integral masing-masing batang kendali harus dibuat terlebih dahulu.
Reaktivitas lebih (core excess reactivity) teras dihitung berdasar pada kurva integral masing-masing batang kendali dan mengamati posisi batang kendali pada saat reaktor kritis pada daya rendah (dalam orde watt). Reaktivitas lebih teras merupakan jumlah dari reaktivitas bagian batang kendali yang masih berada di dalam teras pada saat reaktor kritis pada daya rendah.
1. Picoammeter Keithley 2. Stopwatch
3. Grafik reaktivitas versus waktu 1,5x atau waktu 2x.
I. Kalibrasi Batang Pengatur
1. Dalam keadaan batang pengaman up dan batang pengatur down
2. Dengan mengatur batang kompensasi, reaktor dibuat kritis pada daya 10 watt. Hubungkan detektor CIC dengan picoammeter Keithley dan catat arus yang ditunjukkan oleh picoammeter.
3. Naikkan sedikit kedudukan batang kendali pengatur, maka reaktor akan sedikit super kritis, dengan melihat pada picoammeter ukurlah waktu untuk kenaikan daya 1,5 kali (t 1,5x) atau waktu untuk kenaikan daya 2 kali (t 2x) dengan stopwatch.Kenaikan daya berbanding lurus dengan penunjukan picoammeter Keithley. Catat kedudukan batang pengatur (h).
4. Turunkan kedudukan batang kompensasi sehingga reaktor menjadi kritis kembali pada daya/arus semula.
5. Ulangi langkah 3 dan 4 sampai batang pengatur dalam kedudukan naik penuh. Catatan :
Pada saat menaikkan batang pengatur, periode reaktor jangan sampai menunjuk kurang dari 15 detik dan pengukuran t 1,5x atau t 2x dilakukan pada daerah III, dimana pada daerah ini daya reaktor berubah dengan periode yang konstan.
II. Kalibrasi Batang Kompensasi
1. Dalam kedudukan batang pengatur Up dan batang kompensasi Down. Aturlah kedudukan batang pengaman sehingga reaktor dalam keadaan kritis pada daya 10 watt. Catatan :
Apabila sampai dengan kedudukan batang pengaman diatas penuh ternyata reaktor tidak dapat kritis pada daya 10 watt , maka naikkan kedudukan batang kompensasi sampai pada posisi tertentu sehingga kekritisan dapat dicapai. Pada kedudukan batang kompensasi tertentu sesuai keadaan, hubungkan detektor CIC dengan picoammeter Keithley dan catat besar arus yang tertampil pada picoammeter.
2. Naikkan sedikit kedudukan batang kompensasi, maka reaktor akan mengalami keadaan sedikit superkritis, catat kedudukan batang kompensasi, catat kedudukan batang kompensasi. Dengan melihat pada picoammeter, ukurlah t 1,5 x atau t 2 x.
C Alat Yang Digunakan
3. Turunkan batang pengaman sampai arus penunjukan picoammeter menunjukkan nilai seperti pada keadaan awal percobaan.
4. Ulang I langkah 2 dan 3 berulang-ulang sampai kedudukan batang kompensasi Up. 5. Lakukan pengukuran bagian bawah dari batang kompensasi (bila ada), yaitu posisi pada
saat kritis seperti pada sub nomor 1. hingga kedudukan Down dengan menggunakan
metode “rod drop”.
III. Kalibrasi Batang Pengaman.
Lakukan percobaan seperti pada kalibrasi batang kompensasi, hanya saja batang kompensasi ditukar dengan batang pengaman.
Dalam praktikum yang dilaksanakan pada tanggal 26 April 2010, hanya dilakukan percobaan kalibrasi batang pengatur, sedangkan kalibrasi batang kompensasi dan batang pengaman diberi data oleh asisten dengan prosedur percobaan sama.
I. Kalibrasi Batang Pengaman
No. Batang Kompensasi Batang pengaman Batang Pengatur ∆ρ
1 100 41,7 100 170 2 100 47,1 100 21,5 3 73,5 54 100 29,6 4 62 68,3 100 45,6 5 49,7 77,1 100 24 6 47 93 100 11,7 7 44,8 100 100 3
II. Kalibrasi Batang Kompensasi
No. Batang Kompensasi Batang Pengaman Batang Pengatur ∆ρ
1 44 100 100 170 2 53,1 100 100 42 3 63,2 100 54,2 39,4 4 75,5 100 37,7 34,5 5 85 100 24,1 13,8 6 100 100 18,2 6,9
III. Kalibrasi Batang Pengatur
No. Batang Kompensasi Batang Pengaman Batang Pengatur ∆ρ
1 100 100 14,7 9,6 2 100 100 25 25 3 73,8 100 36,6 26,4 4 63,8 100 48,6 27,4 5 56,3 100 64 29,7 6 49,2 100 100 22,4 E Data Percobaan
1. Penentuan Kurva Integral dan Deferensial
Kenaikan daya reactor KARTINI menjadi 2x dari daya semula
P(0) P(t)
dalam waktu (t) 15 detik, dengan demikian periode reaktor (T) ditentukan sebagai berikut.
[
]
Berdasar persamaan per- jam ρ =
∑
dan harga-harga parameter seperti tabel 1 pada dasar teori, maka reaktivitas mula batang kendali ditentukan dengan persamaan sebagai berikut.Dan nilai reaktivitasnya adalah :
ρ =
∑
=
{
}
ρ= 0,258 dollar =25,8 centPada batang pengaman didapat nilai-nilai ρ dan ∆ρ/∆h sebagai berikut.
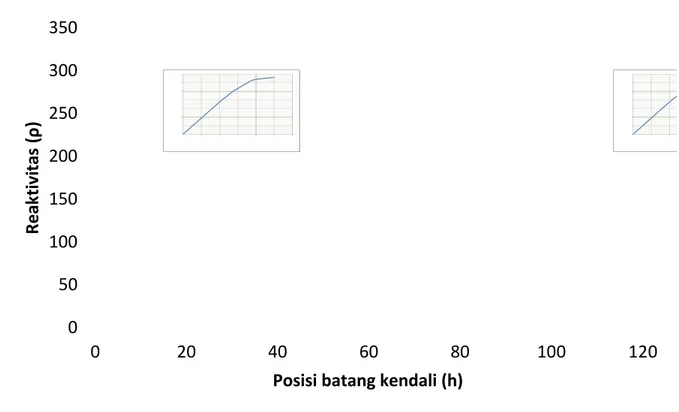
No Kompensasi Pengaman Pengatur ∆ρ ∆ρ/∆h ρ 1 100 41,7 100 170 3,6 195.8 2 100 47,1 100 21,5 3,98 217.3 3 73,5 54 100 29,6 4,29 246.9 4 62 68,3 100 45,6 3,19 292.5 5 49,7 77,1 100 24 2,73 316.5 6 47 93 100 11,7 0,75 328.2 7 44,8 100 100 3 0,43 331.2
Sehingga dapat dibuat kurva integral dan kurva diferensial sebagai berikut.
ρ =
∑
Gambar.4 Kurva Integral reaktivitas batang kendali pengaman
Gambar 5. Kurva diferensial reaktivitas batang kendali pengaman
Dengan menggunakan nilai reaktivitas (ρ) mula yang sama, didapatkan nilai-nilai ρ dan ∆ρ/∆h pada batang kompensasi sebagai berikut.
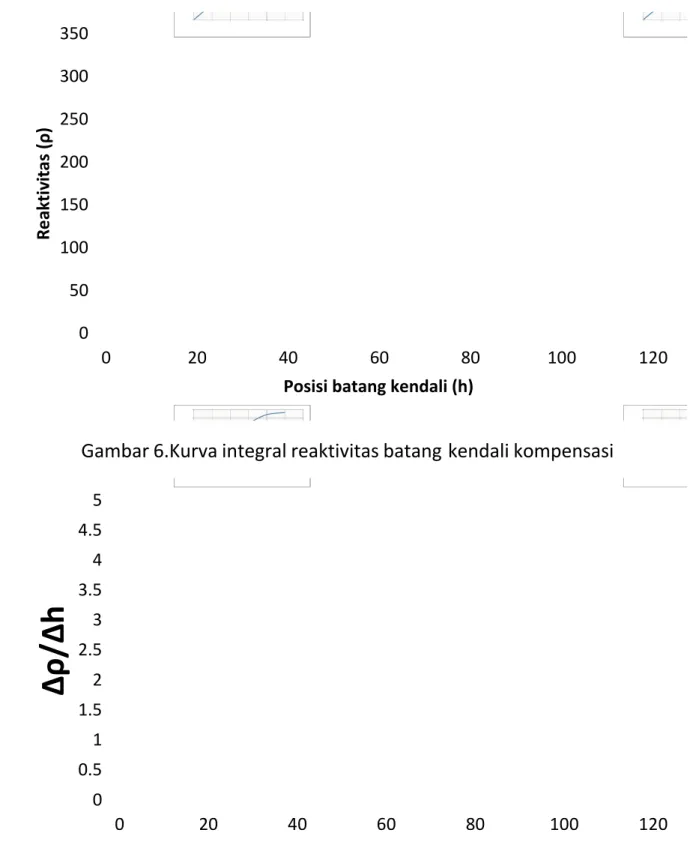
No Kompensasi Pengaman Pengatur ∆ρ ∆ρ/∆h Ρ 1 44 100 100 170 3,86 195.8 2 53,1 100 100 42 4,62 237.8 3 63,2 100 54,2 39,4 3,90 277.2 4 75,5 100 37,7 34,5 2,80 311.7 5 85 100 24,1 13,8 1,45 325.5 0 50 100 150 200 250 300 350 0 20 40 60 80 100 120 R e a k t i v i t a s ( ρ )
Posisi batang kendali (h)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0 20 40 60 80 100 120 ∆ ρ / ∆ h
6 100 100 18,2 6,9 0,46 332.4
Sehingga dapat dibuat kurva integral dan kurva diferensial sebagai berikut.
Gambar 6.Kurva integral reaktivitas batang kendali kompensasi
Gambar 7. Kurva diferensial reaktivitas batang kendali kompensasi
Dengan menggunakan nilai reaktivitas (ρ) mula yang sama, didapatkan nilai-nilai ρ dan ∆ρ/∆h pada batang pengatursebagai berikut.
No Kompensasi Pengaman Pengatur ∆ρ ∆ρ/∆h Ρ 1 100 100 14,7 9,6 0,65 35.40 2 100 100 25 25 4,62 60.40 3 73,8 100 36,6 26,4 3,90 86.80 4 63,8 100 48,6 27,4 2,80 114.20 0 50 100 150 200 250 300 350 0 20 40 60 80 100 120 R e a k t i v i t a s ( ρ )
Posisi batang kendali (h)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0 20 40 60 80 100 120 ∆ ρ / ∆ h
5 56,3 100 64 29,7 1,45 143.90 6 49,2 100 100 22,4 0,46 166.30
Sehingga dapat dibuat kurva integral dan kurva diferensial sebagai berikut.
Gambar 8. Kurva integral reaktivitas batang kendali pengatur
Gambar 9. Kurva diferensial reaktivitas batang kendali pengatur
2. Reaktivitas Total Batang Kendali dalam Teras
ρtotal = (ρ pengaman + ρ komoensasi + ρ pengatur) ρtotal = (331.2 + 332.4 +166.30) = 829,9 cent = 8,299 $
Jadi reaktivitas total dari ketiga batang kendali tersebut adalah 8,299$ atau 0,08299% 3. Reaktivitas Lebih Teras (core excess reactivity)
0.00 20.00 40.00 60.00 80.00 100.00 120.00 140.00 160.00 180.00 0 20 40 60 80 100 120 R e a k t i v i t a s ( ρ )
Posisi batang kendali (h)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0 20 40 60 80 100 120 ∆ ρ / ∆ h
ρlebih = (ρ pengaman + ρ kompensasi + ρ pengatur ) – ρmula
ρlebih = (331.2 + 332.4 +166.30) – 25,8= 804,1 cent = 8,041 $
Jadi reaktivitas lebih dari teras reaktornya adalah 8,041$ atau 0,08041 %.
Praktikum Operasi Kinetika dan Pengendalian Reaktor dengan acara Kalibrasi Batang Kendali bertujuan agar mampu melakukan kalibrasi batang kendali reaktor KARTINI, yaitu penentuan reaktivitas batang kendali dengan jalan membuat grafik reaktivitas suatu batang
kendali terhadap kedudukannya (grafik versus h ) dan membuat grafik h versus h. Selain itu, diharapkan mampu untuk menghitung reaktivitas total ketiga elemen batang kendali di dalam reaktor dan menentukan reaktivitas lebih teras reaktor.
Di dalam teras reaktor KARTINI terdapat tiga buah batang kendali, yaitu sebuah batang kompensasi ( ditempatkan di ring C9 ), sebuah batang pengatur (di ring E1 ) dan
sebuah batang pengaman (di ring C5). Batang kendali tersebut pada dasarnya berisi bahan- bahan yang sangat kuat menyerap netron, dalam hal ini dipakai atom-atom boron ( = 3837
barn).
Percobaan pertama adalah kalibrasi batang kendali pengatur. Proses kalibrasi batang pengatur dilakukan dalam keadaan batang pengaman up dan batang pengatur down. Diatur posisi atau kenaikan batang kompensasi hingga reaktor dalam keadaan kritis pada daya 10
watt. Detektor CIC dihubungkan dengan picoammeterKeithleykemudian dicatat arus yang ditunjukkan oleh picoammeter . Posisi batang kendali pengatur dinaikkan sedikit demi sedikit hingga reaktor berada dalam keadaan superkritis, dicatat posisinya. Dengan melihat pada
picoammeter , diukur waktu untuk kenaikan daya 2 kali (t 2x) dengan stopwatch.Kenaikan daya berbanding lurus dengan penunjukan picoammeterKeithley. Seiring dengan dinaikkannnya batang kendali pengatur, dicatat pula perubahan reaktivitas yang tertera dalam alat ukur. Pengamatan ini perlu dilakukan secara seksama guna mendapat nilai perubahan
reaktivitas yang paling stabil (∆ρ). Posisi batang kendali kompensasi diturunkan sehingga reaktor menjadi kritis kembali pada daya/arus semula yaitu 10 watt. Langkah tersebut diulang secara terus-menerus hingga batang kendali pengatur berada pada posisiup 100%.Setelah itu, batang kendali pengatur diturunkan kembali ke posisi awal guna mendapat perubahan
reaktivitas pada posisi pertama yaitu h = 14,7%. Pengoperasian reaktor dilakukan oleh supervisor reaktor KARTINI.
Dari analisa data percobaan dan perhitungan diperoleh reaktivitas mula (ρ) sebesar 25,8 cent. Reaktivitas ini diperoleh dari persamaan (2) pada dasar teori dalam satuan dollar yang diubah ke cent sesuai satuan pada penunjukan alat ukur reaktivitas yang digunakan.
Sebelumnya telah dihitung besarnya periode reaktor KARTINI berdasar kenaikan daya reaktor menjadi dua kalinya dan waktu yang dibutuhkan dalam kenaikan daya tersebut. Reaktivitas awal ini digunakan sebagai acuan untuk menentukan reaktivitas di masing-masing posisi batang kendali pengatur sesuai dengan besar perubahan reaktivitas. Dari data yang diperoleh, setelah diolah dalam analisa data dan perhitungan, didapatkan kurva integral dan kurva diferensial seperti terlihat pada gambar 8 dan gambar 9. Dari kurva tersebut didapat pergerakan reaktivitas yang linear pada kedudukan batang kendali antara 20% hingga 60%. Dari kurva tersebut, besarnya reaktivitas batang kendali pengatur yaitu reaktivitas saat posisi batang kendali dalam keadaan masimum (100%) sebesar 166,3 cent atau 1,663 $. Dalam kurva diferensial, batang kendali pengatur bekerja paling efektif pada posisi (h) sekitar 25%. Hal ini ditunjukkan dengan tingginya angka∆ρ/∆h pada posisi tersebut.
Percobaan kedua dan ketiga, yaitu kalibrasi batang kendali pengaman dan kalibrasi batang kendali kompensasi tidak dilakukan secara langsung melainkan hanya mangolah data
yang telah diambil oleh asisten praktikum.Dari data-data yang diberikan, didapat kurva integral dan kurva diferensial seperti pada gambar 4, gambar 5, gambar 6 dan gambar 7.Mengacu pada kurva integral, untuk batang kendali pengaman, reaktivitasnya sebesar 331,2 cent, sedangkan untuk batang kendali kompensasi, reaktivitasnya sebesar 332,4 cent. Daerah linear pada batang kendali pengaman dan kompensasi terletak pada posisi (h) antara 20% hingga 70%. Mengacu pada kurva diferensial, untuk batang kendali pengaman bekerja paling efektif pada kedudukan 54 %, sedangkan untuk batanga kendali kompensasi bekerja paling efektif pada kedudukan 53,1 %.
Reaktivitas total batang kendali di dalam teras reactor KARTINI yang merupakan jumlah reaktivitas dari ketiga batang kendali, sebesar 829,9 cent, dalam satuan dollar sebesar
8,299 $ dan dalam persen sebesar 0,08299 %. Sedangkan untuk reaktivitas lebih teras (core excess reactivity) sebesar8,041$ atau 0,08041 %.
Kalibrasi dilakuka pada daya rendah dimaksudkan agar bila terjadi lonjakan prompt ( prompt jump) pada daya yang semula relative rendah tidak terjadi scram atau batang kendali jatuh bebas untuk menhentikan operasi reactor. Bila dari awal dilakukan pada daya tinggi, saat terjadi hal yang tidak diinginkan hingga periode reactor kurang dari 7 detik, maka prompt jump bias mengakibatkan reactor scram.
Fungsi dari batang kendali kompensasi adalah untuk mengimbangi penurunan reaktivitas yang bias disebabkan salah satunya karena berkurangnya bahan bakar selama reactor bekerja, dengan reaktivitas ekuivalen yang cukup besar. Batang kendali pengaman berfungsi untuk menghentikan reactor secara cepat, misalnya dalam keadaan darurat, dengan reaktivitas yang cukup besar dan bergerat sangat cepat.Sedangkan batang kendali pengatur berfungsi untuk mengimbangi perubahan reaktivitas yang kecil dan cepat, misalnya selama
mempertahankan reactor supaya bekerja dalam daya yang tetap.Dungsi tersebut diimbangi dengan pengaturan tata letak batang kendali dalam teras reactor. Dalam teras reactor KARTINI, batang kendali pengaman dan pangatur ditempatkan pada ring C, yaitu C9 dan C5 sedangkan batang kendali pengatur ditempatkan pada ring E, yaitu E1. Penempatan ini sesuai dengan fungsi batang kendali pengatur yaitu mengimbangi perubahan reaktivitas yang kecil dan cepat. Berdasar kurva diferensial seperti ditunjukkan pada gambar 3, batang kendali pengatur dengan efektifitas kerja tertinggi pada posisi kisaran 20% (menurut percobaan 25%), nilai ∆ρ/∆htidak terlalu tinggi, artinya perubahan reaktivitas di setiap perubahan kedudukan batang kendali relative kecil sehingga akan didapat pengaturan reaktivitas yang lebih halus yang nantinya diaplikasikan pada pengaturan fluks neutron, daya maupun arus reactor yang lebih halus.
1. Dari hasil percobaan diperoleh reaktivitas batang kendali sebagai berikut, Batang Kendali Pengaman sebesar 331,2 cent atau 3,312 $,
Batang Kendali Kompensasi sebesar 332,4 cent atau 3,324 $, Batang Kendali Pengatur sebesar 166,8 cent atau 1,663 $.
2. Kenaikan reaktivitas yang relatif sebanding dengan kenaikan posisi batang kendali ditunjukkan sebagai berikut,
Batang Kendali Pengaman pada posisi (h) 20% hingga 70%, Batang Kendali Kompensasi pada posisi (h) 20% hingga 70%, Batang Kendali Pengatur pada posisi (h) 20% hingga 60%,
dalam kurva integral ( versus h) ditunjukkan dengan bentuk kurva linear.
3. Efektifitas kerja maksimum berdasarkan posisi tiap batang kendali berbeda-beda, ditunjukkan sebagai berikut,
Batang Kendali Pengaman memiliki efektivitas kerja maksimum pada posisi (h) 54%, Batang Kendali kompensasi memiliki efektivitas kerja maksimum pada posisi (h) 53,1%, Batang Kendali Pengatur memiliki efektivitas kerja maksimum pada posisi (h) 25%, dalam kurva diferensial (h versus h) ditunjukkan dengan puncak tertinggi.
4. Reaktivitas total ketiga elemen batang kendali yang diambil dari jumlah reaktivitas masing-masing batang kendali pada posisi maksimum sebesar 829,9 cent atau 8,299 $. 5. Reaktivitas lebih teras (core excess reactivity) yang diambil dari jumlah reaktivitas bagian
batang kendali yang masih berada dalam teras reactor pada saat reactor kritis pada daya rendah sebesar 8,041$ atau 0,08041 %.
6. Batang kendali pengatur ditempatkan di ring terluar dari ketiga batang kendali yang ada (ring E1) sesuai dengan fungsinya yaitu mengimbangi perubahan reaktivitas yang kecil dan cepat dengan aplikasi pengaturan fluks neutron, daya mapun arus reactor yang lebih halus.
Budisantoso, Edi Trijono. 1998. Petunjuk Praktikum Fisika Reaktor . Universitas Gadjah Mada. Yogyakarta.
Widarto. 2003. Operasi Reaktor Nuklir Kartini. Pusat Penelitian Nuklir Yogyakarta – Badan Tenaga Nuklir Nasional.Yogyakarta.
Syarip. 2001. Kinetika dan Pengendalian Reaktor Nuklir . Pusat Penelitian dan Pengembangan Teknologi Maju – Badan Tenaga Nuklir Nasional.Yogyakarta.
Ridwan, Mohammad dkk.1978. Ilmu Pengetahuan dan Teknologi Nuklir .Badan Tenaga Atom Nasional. Jakarta.
Yogyakarta, 31 Mei 2010
Praktikan,
Zaenab Fitria Permanawati
LAPORAN PRAKTIKUM
KALIBRASI BATANG KENDALI
Disusun Oleh:
ZAENAB FITRIA PERMANAWATI 020700213
PROGRAM STUDI ELEKTRONIKA INSTRUMENTASI