SISTEM KONTROL PNEUMATIK
PADA PINTU BUS OTOMATIS
PROYEK AKHIR
Diajukan dalam rangka menyelesaikan Studi Sarjana Strata Satu di Universitas Negeri Semarang Jurusan Pendidikan Teknik Mesin
Oleh :
N a m a : Heri Widiantono
NIM : 5219990016
Program Studi : Pend. Teknik Mesin S1
FAKULTAS TEKNIK
UNIVERSITAS NEGERI SEMARANG
2004
BAB I
PENDAHULUAN
A. Latar Belakang
Di masa sekarang dan masa yang akan datang, kebutuhan akan transportasi sangat vital dalam menunjang aktivitas seharihari, seperti mengantar anak ke sekolah, ke kantor, ke pasar dan lainlain.
Dari sekian banyak jenis alat transportasi yang ada, maka jenis transportasi daratlah yang paling banyak. Mulai dari sepeda, becak, sepeda motor, mobil sampai kereta api.
Dalam usaha pemenuhan kebutuhan alat transportasi maka bukan suatu masalah bagi golongan masyarakat ekonomi menengah ke atas. Mereka dapat memilih alat transportasi sesuai dengan kemampuannya. Namun merupakan suatu masalah bagi masyarakat ekonomi bawah. Sehingga sebagai alternatifnya adalah menggunakan angkutan umum, misalnya bus. Seiring dengan tuntutan kebutuhan masyarakat sekarang ini, maka penggunaan angkutan umum seperti bus tidak terbatas pada masyarakat ekonomi bawah saja tetapi juga masyarakat ekonomi menengah ke atas. Dengan beragamnya pengguna angkutan umum tersebut, maka beragam pula tuntutan pelayanannya. Bagi golongan menengah ke atas, mereka lebih mengutamakan pelayanan dan fasilitas yang baik. Mereka akan merasa puas bila dapat melakukan perjalan dengan cepat, selamat, serta aman dan nyaman meskipun tarif yang harus dibayar lebih mahal. Tetapi
bagi golongan ekonomi bawah lebih memilih angkutan umum yang tarifnya murah sesuai dengan kemampuannya meskipun dengan fasilitas di bawah standar.
Salah satu usaha dalam rangka peningkatan mutu pelayanan khususnya bagi keamanan dan keselamatan penumpang adalah dengan mengkaji ulang masalah konstruksi kendaraan. Konstruksi kendaraan yang baik dapat meminimalkan terjadinya kecelakaan penumpang.
Sebagai salah satu contoh adalah pintu bus. Banyak orang beranggapan bahwa pintu bus merupakan bagian dari bus yang berfungsi sebagai pelengkap saja. Hal ini bisa dilihat dari tidak difungsikannya pintu bus dengan baik. Padahal tujuan dari dibuatnya pintu bus adalah untuk keamanan dan keselamatan penumpangnya. Agar pintu bus dapat berfungsi dengan baik sesuai dengan tujuannya maka perlu dibuat suatu konstruksi pintu bus yang baik. Sebagian besar konstruksi pintu bus yang ada saat sekarang ini masih menggunakan sistem manual, sehingga masih banyak dijumpai kekurangankekurangannya, antara lain :
1. Sistem manual memerlukan tenaga manusia untuk membuka dan menutupnya.
2. Konstruksi pintu sistem manual cepat rusak apabila pada saat membuka dan menutupnya terlalu keras.
Mengingat kekurangankekurangan yang ada pada konstruksi pintu bus sistem manual, maka perlu dipertimbangkan suatu konstruksi yang lebih baik sehingga kekurangankekurangan yang ada pada sistem tersebut dapat diatasi.
Salah satunya adalah dengan merancang konstruksi pintu bus otomatis dengan sistem pneumatik, yaitu suatu pintu bus otomatis yang dikendalikan oleh sistem kontrol pneumatik.
B. Permasalahan
Dalam merencanakan sistem kontrol pneumatik pada pintu bus otomatis ini, perlu dipertimbangkan kemungkinan masalahmasalah yang dapat terjadi. Hal ini untuk menghindari suatu desain sistem kontrol pneumatik yang kurang baik sehingga justru dapat membahayakan keselamatan penumpang.
Untuk itu dalam merancang sistem kontrol pneumatik ini harus memenuhi persyaratanpersyaratan sebagai berikut :
1. Konstruksinya sederhana. 2. Pengoperasiannya mudah
3. Pemeliharaan dan perawatan mudah
4. Memenuhi persyaratan keamanan dan keselamatan penumpang. Mengingat keterbatasanketerbatasan yang ada, maka dalam pembuatan sistem kontrol pneumatik pada pintu bus otomatis hanya berupa desain. Meskipun demikian diharapkan dapat dipergunakan sebagai pedoman dalam pembuatan pintu bus otomatis yang sebenarnya.
C. Tujuan
Tujuan yang ingin dicapai dari pembuatan sistem kontrol pneumatik pada pintu bus otomatis ini adalah untuk mengatasi permasalahan permasalahan yang ada pada pintu bus sistem manual. Sehingga diharapkan akan diperoleh suatu konstruksi pintu bus yang baik, yang mempunyai persyaratanpersyaratan sebagai berikut : 1. Konstruksi yang sederhana. 2. Mudah dioperasikan. 3. Mudah dan sederhana dalam pemeliharaan dan perawatannya. 4. Memenuhi persyaratan keamanan dan keselamatan penumpang.
D. Manfaat
Apabila semua tujuan dari pembuatan sistem kontrol pneumatik pada pintu bus tersebut dapat dicapai maka akan didapatkan beberapa manfaat, antara lain :1. Penumpang merasa nyaman karena dapat keluar dan masuk bus dengan mudah.
2. Pintu kendaraan lebih awet.
3. Biaya pemeliharaan dan perawatan murah
E. Sistematika
Guna memberikan gambaran lengkap tentang sistem kontrol pneumatik pada pintu bus otomatis, maka perlu disusun dan dituangkan dalam rumusan yang sederhana, jelas dan mudah dipahami maknanya. Untuk itu maka penulisan karya ilmiah ini disusun dengan tata urutan sebagai berikut :
1. Bagian Depan
Bagian ini berisi pendahuluan yang meliputi latar belakang, permasalahan, tujuan dan manfaat dari pembuatan sistem kontrol pneumatik pada pintu bus otomatis.
2. Bagian Isi
Bagian ini terdiri dari 3 (tiga) bab yaitu Bab II yang berisi tentang landasan teori, Bab III yang berisi uraian tentang sistem kontrol pneumatik pada pintu bus otomatis dan Bab IV berisi analisa sistem kontrol pneumatik.
3. Bagian Akhir
Bagian ini merupakan bagian penutup yang berisi kesimpulan dan saran.
BAB II
LANDASAN TEORI
Pengertian Teknik Otomasi
Berawal dari keinginan manusia untuk memperoleh sesuatu yang banyak dengan tenaga yang sedikit atau mengerjakan pekerjaan yang berat dengan menggunakan tenaga yang ringan. Maka secara bertahap manusia berinovasi memanfaatkan sumber daya alam untuk mendapatkan kemudahankemudahan dan manfaatmanfaat tersebut.
Hingga kini manusia mengembangkan inovasi untuk menggunakan alat alat atau pesawatpesawat yang dapat bekerja secara otomatis, sebagai contoh: pintu bus yang dapat membuka dan menutup secara otomatis, karena pintu bus dikontrol secara otomatis oleh suatu sistem kontrol otomatis.
Otomatisasi suatu alat atau mesin diperoleh dari suatu masukan (input) kemudian melalui suatu proses didapat suatu keluaran (output) yang berbeda yang lebih baik dan lebih menguntungkan.
Otomatisasi adalah suatu pengubahan input menjadi output yang lebih baik. Proses pengubahan input menjadi output ini menggunakan teknik kontrol, sehingga untuk mendapatkan sistem kontrol yang otomatis maka digunakan sistem kontrol yang otomatis juga.
Definisi Kontrol menurut Deutche Institut für Normung (DIN) 19226 : “Kontrol berarti proses dalam suatu sistem yang di dalamnya terdapat beberapa input variabel mempengaruhi variabel output yang lain sebagai akibat hukumhukum yang mengenai sistem. Pengontrolan dikarakteristikkan dengan sekuensi rangkaian terbuka dari gerakangerakan melalui elemen pemindah tunggal atau rangkaian kontrol” (Sugihartono, 1992 : 4). Definisi Kontrol Otomatis menurut DIN 19226 : “Kontrol otomatis adalah suatu proses dimana satu variabel yang akan dikontrol (variabel yang dikontrol), adalah diukur secara terusmenerus dan dibandingkan dengan variabel yang lain, variabel perintah, proses yang dipengaruhi menurut hasil perbandingan ini dengan memodifikasi untuk menyesuaikan variabel perintah. Sekuensi gerakan yang dihasilkan dari ini terjadi dalam suatu rangkaian tertutup, rangkaian kontrol. Tujuan kontrol rangkaian untuk menyesuaikan harga variabel yang dikontrol terhadap harga yang ditentukan oleh variabel perintah sekalipun ekualisasi tidak dicapai berlaku dalam keadaan ini (Sugihartono, 1992 : 4).
Dasar –Dasar Pneumatik
1. Pengertian PneumatikPneumatik merupakan teori atau pengetahuan tentang udara yang bergerak, keadaankeadaan keseimbangan udara dan syaratsyarat keseimbangan. Pneumatik berasal dari bahasa Yunani “pneuma” yang berarti “nafas” atau “udara”. Jadi pneumatik berarti terisi udara atau digerakkan oleh udara mampat.
Sistem pneumatik (pneumatic system) adalah semua sistem yang menggunakan tenaga yang disimpan dalam bentuk udara yang dimampatkan, serta dimanfaatkan untuk menghasilkan suatu kerja.
Udara mampat adalah udara atmosfer yang diisap oleh kompresor dan dimampatkan dari tekanan normal (0,98 bar) sampai tekanan yang lebih tinggi (antara 4 – 8 bar).
Pada mulanya pemakaian udara mampat terbatas untuk alatalat kerja dengan peralatan tumbuk atau putar. Namun dengan perkembangan teknologi, mekanisasi dan otomatisasi, maka setelah Perang Dunia II banyak digunakan pada proses produksi. 2. Karakteristik Udara Mampat Dalam jangka waktu yang relatif singkat, penggunaan sistem kontrol pneumatik sudah sedemikian luasnya. Salah satu alasannya adalah bahwa udara mudah diperoleh dan murah.
Karakteristikkarakteristik udara mampat berkaitan dengan penerapan pada sistem kontrol pneumatik : Jumlah : udara tersedia di mana saja dan dalam jumlah yang tak terhingga. Pengangkutan : udara mampat dapat diangkut dengan mudah melalui saluran pipapipa atau selang. Di sini tidak dibutuhkan saluran balik, karena udara bekas dapat langsung dibuang di udara bebas. Penyimpanan : kompresor tidak harus selalu beroperasi. Udara mampat dapat disimpan di dalam tangki. Suhu : udara mampat tahan terhadap perubahan suhu.
Hal ini menjadikan jaminan kerja yang lebih besar dari sistem kontrol pneumatik. Tahan ledakan : udara mampat tidak menyebabkan bahaya ledakan atau kebakaran. Kebersihan : udara mampat bersih. Bila terdapat kebocoran saluran atau komponen, maka tidak akan menyebabkan polusi. Konstruksi : konstruksinya sederhana sehingga komponen komponennya murah. Kecepatan : udara mampat dapat mencapai kecepatan aliran yang tinggi (kecepatan operasi silinder pneumatik adalah 1 – 2 m/s) Pengaturan : kecepatan dan gaya dari udara mampat serta peralatan pneumatik dapat diatur secara tak terbatas. Tahan beban lebih : peralatan pneumatik dan perlengkapan operasinya dapat dibebani lebih hingga berhenti. Suatu jaringan pneumatik dapat diberi beban lebih tanpa merusak.
3. Konstruksi Sistem Pneumatik
Yang dimaksud dengan konstruksi sistem pneumatik di sini adalah konstruksi rangkaian komponenkomponen pneumatik yang lengkap. Secara umum komponenkomponen pneumatik dapat dikelompokkan menjadi 3 (tiga) yaitu : unit tenaga, unit pengatur dan unit penggerak.
a. Unit Tenaga (power pack)
Unit ini berfungsi untuk membangkitkan tenaga fluida yaitu berupa aliran udara mampat. Unit tenaga ini terdiri atas kompresor yang digerakkan oleh motor listrik atau motor bakar, tangki udara
(receiver) dan kelengkapannya, serta unit pelayanan udara yang
terdiri atas filter udara, regulator pengatur tekanan dan lubricator. 1) Kompresor
Berfungsi untuk membangkitkan udara mampat. Menurut cara kerjanya, kompresor dibagi menjadi :
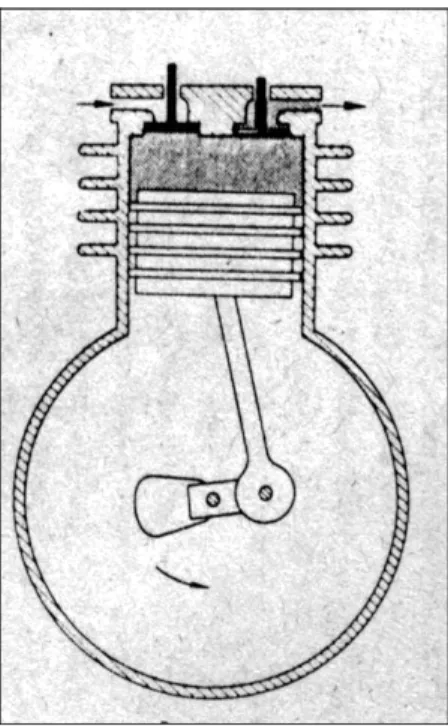
a) Kompresor pemindah.
Kompresor yang bekerja berdasarkan prinsip pemindahan. Udara dikempa oleh gerakan torak yaitu udara dimasukkan ke dalam ruangan kemudian dimampatkan. b) Kompresor aliran. Kompresor yang bekerja berdasar prinsip aliran udara. Udara disedot masuk ke dalam kompresor melalui satu sisi dan mengempanya dengan percepatan masa.
Gambar 1 : Kompresor torak langkah tunggal dengan silinder yang didinginkan oleh udara (Dr. Ing. Thomas Krist, Alih Bahasa Dines Ginting, 1993 : 179)
2) Tangki Udara
Berfungsi untuk menampung dan menstabilkan pemakaian udara mampat serta dapat berfungsi untuk mendinginkan udara mampat yang terdapat di dalam tangki.
3) Unit Pelayanan Udara (sevice unit)
Bila udara mampat di dalam tangki udara akan didistribusikan ke seluruh sistem pneumatik harus diatur sedemikian rupa sehingga udara yang keluar memenuhi kriteria sebagai berikut :
a) Udara yang masuk ke dalam sistem harus bersih. Untuk itu udara yang keluar dari tangki harus disaring dengan filter.
b) Tekanan udara mampat yang masuk ke dalam sistem harus
sesuai dengan tekanan operasi. Untuk itu perlu adanya alat pengatur tekanan (pressure regulator).
c) Udara yang masuk ke dalam sistem harus mampu
melumasi komponenkomponen yang bergerak. Untuk itu udara harus dicampur dengan kabut oli. Hal ini dapat dicapai dengan adanya lubricator.
b. Unit Pengatur (control element)
Unit pengatur merupakan bagian pokok yang menjadikan sistem pneumatik termasuk sistem otomasi. Karena dengan unit pengatur ini hasil kerja dari sistem pneumatik dapat diatur secara otomatis baik gerakan, kecepatan, urutan gerak, arah gerakan maupun kekuatannya. Dengan unit pengatur ini sistem pneumatik dapat didesain untuk berbagai tujuan otomatis dalam suatu mesin industri.
Fungsi dari unit pengatur ini adalah untuk mengatur atau mengendalikan jalannya penerusan tenaga fluida hingga menghasilkan bentuk kerja (usaha) yang berupa tenaga mekanik.
Bentukbentuk dari unit pengatur ini berupa katup (valve) yang bermacammacam. Katup adalah suatu alat yang menerima perintah dari luar untuk melepas, menghentikan atau mengarahkan fluida yang melalui katup tersebut.
Menurut fungsinya katupkatup tersebut dibedakan menjadi 5 (lima) kelompok yaitu : Katup pengarah (Directional control valves) Katup satu arah (Nonreturn valves) Katup pengatur tekanan (Pressure control valves) Katup pengatur aliran (Flow control valves) Katup kombinasi 1) Katup Pengarah (directional control valves) Katup ini berfungsi untuk mengontrol aliran dalam rangkaian dan melangsungkan fungsifungsi logic control. Gambar 4 : Katup pengarah (directional control valve) (Catalogue, hal 15)
2) Nonreturn Valve / Check Valve
Check valve adalah katup satu arah, artinya katup hanya dapat digunakan untuk satu arah aliran saja. Check valve dapat berfungsi sebagai pengarah aliran dan juga sebagai pressure
control. Gambar 5 : Katup satu arah (check valve) (Catalogue, hal.65) 3) Katup Pengatur Tekanan (pressure control valve) Gambar 6 : Katup pengatur tekanan (pressure control valve) (Catalogue, hal. 20) Pengatur tekanan udara dilakukan untuk berbagai tujuan antara lain untuk membatasi tekanan operasional dalam sistem
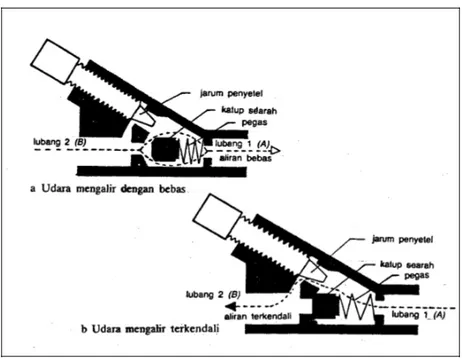
pneumatik, untuk mengatur tekanan agar penggerak pneumatik dapat bekerja secara berurutan, untuk mengurangi tekanan yang mengalir dalam saluran tertentu menjadi kecil. Sehingga sesuai dengan tujuan penggunaan tersebut maka katup pengatur tekanan dibedakan menjadi beberapa macam antara lain : relief valve, sequence valve, dan lainlain. 4) Katup Pengatur Aliran (flow control valve) Katup ini digunakan untuk mengatur volume aliran yang berarti mengatur kecepatan gerak piston (actuator). Gambar 7 : Katup pengatur aliran (flow control valve) (Catalogue, hal.56) Fungsi dari pemasangan flow control valve pada rangkaian pneumatik antara lain untuk membatasi kecepatan maksimum gerakan piston/motor pneumatik, untuk membatasi daya yang bekerja (daya = ratarata aliran x tekanan), serta untuk menyeimbangkan aliran yang mengalir pada cabangcabang rangkaian pneumatik.
Gambar 8 : Penampang pengatur aliran (Peter P, dkk. , 1985 : 43) Sehingga untuk memenuhi fungsifungsi tersebut di atas maka flow control valve dibedakan menjadi beberapa jenis, antara lain fixed flow control, variable flow control, flow control dengan check valve dan flow control dengan relief valve. c. Unit Penggerak (actuator) Unit ini berfungsi untuk mewujudkan hasil transfer daya dari tenaga fluida, berupa gerakan lurus atau gerakan putar. Penggerak yang menghasilkan gerakan lurus adalah silinder penggerak, sedangkan yang menghasilkan gerakan putar adalah motor pneumatik.
1) Silinder Pneumatik
Dalam sistem pneumatik, silinder penggerak dibedakan menjadi :
a) Silinder Kerja Tunggal
Pada silinder ini udara mampat bekerja hanya pada satu sisi. Untuk mengembalikan piston ke posisi semula digunakan pegas. Cara pemasangan pegas ada 2 (dua) macam, yaitu :
• Pegas dipasang pada sisi batang piston. Dalam hal ini pegas hanya berfungsi untuk mengembalikan piston ke posisi semula, sedangkan langkah kerja dilakukan oleh tekanan udara mampat. Silinder penggerak jenis ini biasanya digunakan untuk pencekaman, pengepresan, pengungkitan, pengangkatan dan sebagainya.
• Pegas dipasang pada sisi yang tanpa batang piston. Dalam hal ini pegas berfungsi sebagai pelaku langkah kerja, sedangkan udara mampat dari sebelah sisinya berfungsi untuk mengembalikan ke posisi semula yaitu posisi tidak kerja.
Gambar 9 : Silinder silinder pneumatik (Catalogue, hal. 43 dan 44) b) Silinder Kerja Ganda
Silinder kerja ganda adalah apabila langkah kerja terjadi pada kedua belah sisi piston, jadi udara mampat mendorong pada sisi depan maupun sisi belakang secara bergantian. 2) Motor Pneumatik Menurut bentuk dan konstruksinya, motor pneumatik dibedakan menjadi : • Motor torak • Motor balingbaling luncur • Motor roda gigi • Motor aliran
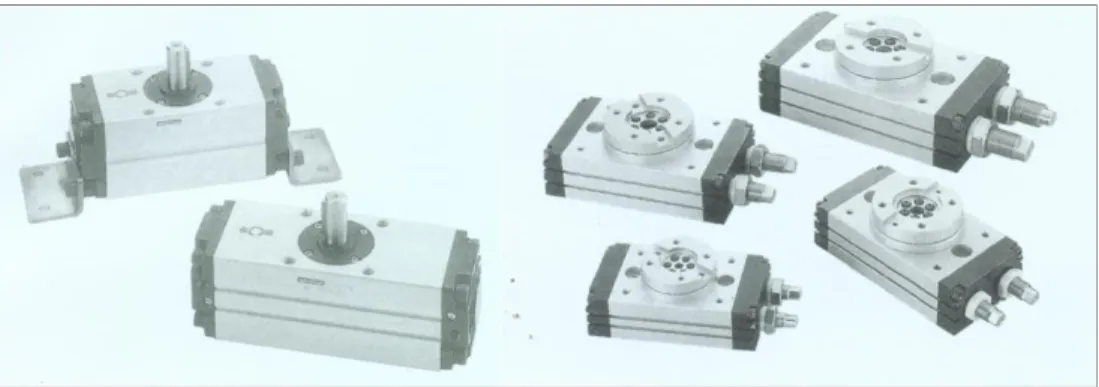
Gambar 10 : Rotary actuator (Catalogue, hal. 51)
Karakteristik motor pneumatik :
• Kecepatan putaran dan tenaga dapat diatur secara tak terbatas. • Batas kecepatan cukup lebar. • Ukuran kecil sehingga ringan. • Ada pengaman beban lebih. • Tidak peka terhadap debu, cairan, panas dan dingin. • Tahan ledakan. • Mudah dalam pemeliharaan. • Arah putaran mudah dibolakbalik.
BAB III
SISTEM KONTROL PNEUMATIK PADA PINTU BUS OTOMATIS Definisi Persoalan Dan Kondisi Persoalan : Guna mengatasi kekurangankekurangan yang terdapat pada pintu bus manual, maka akan didesain suatu pintu bus otomatis. Pintu ini akan dikontrol secara otomatis dengan menggunakan sistem kontrol pneumatik. Dengan adanya sistem kontrol ini maka diharapkan dapat mengatasi kekurangankekurangan yang ada pada pintu bus konvensional.Kondisikondisi Bantu :
Adapun kondisikondisi yang diharapkan dari sistem kontrol pneumatik ini adalah sebagai berikut :
a. Pada saat bus sedang menunggu penumpang di terminal, halte atau pada tempattempat pemberhentian bus lainnya, maka pintu bus dalam kondisi terbuka. b. Bila bus akan berangkat atau melanjutkan perjalanan, maka pintu bus segera ditutup. c. Apabila di tengah perjalanan ada penumpang yang akan turun, maka penumpang tersebut tinggal menekan tombol di depan pintu bus, dan pintu akan segera membuka. Dan bila penumpang telah turun maka pintu akan segera menutup kembali secara otomatis. d. Saat akan menaikkan penumpang di tengah perjalanan, maka sopir atau kondektur cukup menekan katup tombol dan pintu akan segera terbuka secara otomatis. Setelah penumpang naik maka pintu bus akan menutup kembali secara otomatis.
Energi Kerja Dan Ukuran Elemen 1. Energi Kerja Operasi yang harus dilakukan oleh silinder dapat dibentuk dengan gerakan garis lurus. Gaya yang diperlukan : kecil (kurang dari 50.000 N) Panjang gerakan : kecil (kurang dari 2000 mm) Energi yang dipilih : pneumatik 2. Ukuran Elemen Kerja Ukuran elemen kerja dipilih sesuai dengan hasil analisis sehingga gaya dan langkah cukup untuk mengoperasikan saklar batas. Sket Posisional Gambar 11 Sket posisional pintu bus otomatis dengan sistem kontrol pneumatik Sekuensi Operasi Sekuensi Kronologis Silinder A bergerak mundur dan pintu bus membuka. Silinder A bergerak maju dan pintu bus menutup.
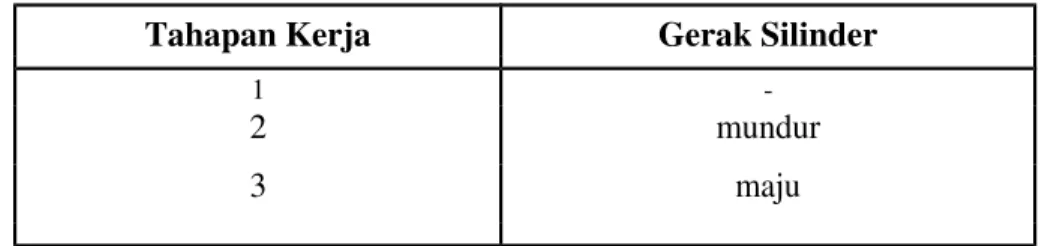
Tabel Susunan Tabel 1 Tahapan Kerja Sistem Kontrol Pneumatik Tahapan Kerja Gerak Silinder 1 2 mundur 3 maju Notasi Singkatan A (Silinder A mundur, pintu bus membuka)
A + (Silinder A maju, pintu bus menutup)
Jenis Kontrol Identifikasi kelompok utama : Ini adalah suatu kontrol program (kontrol dengan suatu program kerja yang dilakukan secara otomatis sesuai dengan kaidahkaidah tertentu). Jenis kontrol programnya adalah kontrol gerakan yang dikoordinasikan, dengan pertimbangan sebagai berikut : • Kepastian operasi. • Penyelesaian paling murah dan sederhana. • Tidak memerlukan perubahan program. Energi Kontrol
Berkenaan dengan media kerja dan bidang persoalan, ada 2 (dua) kemungkinan yaitu pneumatik dan elektrik. Dalam hal ini penyelesaian seluruh pneumatik adalah kemungkinan paling menguntungkan, dengan pertimbangan sebagai berikut :
• Hanya 1 (satu) bentuk energi untuk kerja dan kontrol, sehingga tidak membutuhkan konverter.
• Tingkat reliabilitas atau keandalan tinggi, karena tidak peka terhadap lingkungan yang mempengaruhi. • Umurnya panjang. Oleh karena itu, untuk sistem kontrol ini dipilih sistem kontrol pneumatik. Diagram Rangkaian Kontrol Pintu Bus Otomatis Silinder 1 A 1S1 1V5 1V6 4 2 1V4 1.4 (Y) 1.2 (X) 5 3 1 1V3 1V2 1V1
Pintu bus Sopir Sopir
1S1 2 1S2 2 1S3 2 1S4 2 1 3 1 3 1 3 1 3 0Z1 Gambar 12 Diagram Rangkaian Kontrol Pintu Bus Otomatis Keterangan : = Silinder kerja ganda
= Katup kontrol aliran satu arah
= Katup 5/2 untuk kontrol silinder, katup
pilot ganda
= Katup tunda waktu
= Katup balik fungsi “ATAU”
= Katup batas 3/2 dengan pegas
pembalik
= Katup tombol 3/2 dengan pegas
= Katup tuas 3/2 dengan penahan
= Unit pelayanan udara
= Sumber udara mampat
= Saluran kontrol
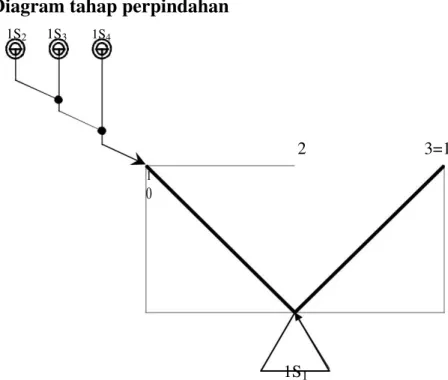
Diagram tahap perpindahan
1S2 1S3 1S4 2 3=1 1 0 1S1 Gambar 13 Diagram Tahap Perpindahan Simbol Logika 1S2 1S3 1 1 1.2 (X)1V4 1S4(a) Gerakan pintu bus membuka (silinder mundur)
1S1 1 1V4
1.4 (Y)
(b) Gerakan pintu menutup (silinder maju)
Gambar 114 Simbol logika untuk gerakan pintu bus
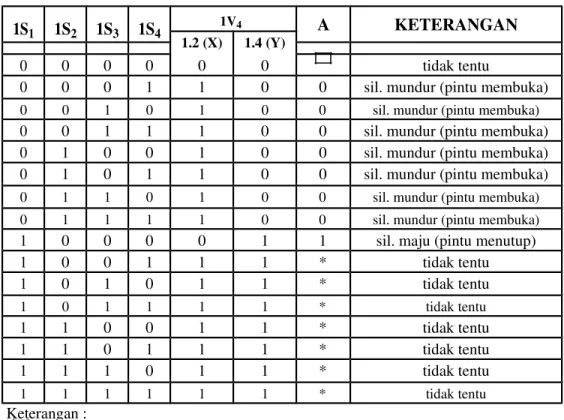
Table 2 Tabel Biner Gerakan Pintu Bus 1S1 1S2 1S3 1S4 1.2 (X)1V41.4 (Y) A KETERANGAN 0 0 0 0 0 0 tidak tentu 0 0 0 1 1 0 0 sil. mundur (pintu membuka) 0 0 1 0 1 0 0 sil. mundur (pintu membuka) 0 0 1 1 1 0 0 sil. mundur (pintu membuka) 0 1 0 0 1 0 0 sil. mundur (pintu membuka) 0 1 0 1 1 0 0 sil. mundur (pintu membuka) 0 1 1 0 1 0 0 sil. mundur (pintu membuka) 0 1 1 1 1 0 0 sil. mundur (pintu membuka) 1 0 0 0 0 1 1 sil. maju (pintu menutup) 1 0 0 1 1 1 * tidak tentu 1 0 1 0 1 1 * tidak tentu 1 0 1 1 1 1 * tidak tentu 1 1 0 0 1 1 * tidak tentu 1 1 0 1 1 1 * tidak tentu 1 1 1 0 1 1 * tidak tentu 1 1 1 1 1 1 * tidak tentu Keterangan : = tidak ada tekanan udara pada saluran 1.2 (X) dan saluran 1.4 (Y) * = ada tekanan udara pada kedua saluran 1.2 (X) dan 1.4 (Y) Untuk Saluran 1.2 (X) Persamaan matematisnya : X (S1 S2 S3 S4 ) (S1 S 2 S3 S4 ) X (S1 S2 S3 S 4 ) (S1 S 2 S3 S4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S4 ) (S1 S2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S4 ) (S1 S2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S4 ) (S1 S2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S4 )
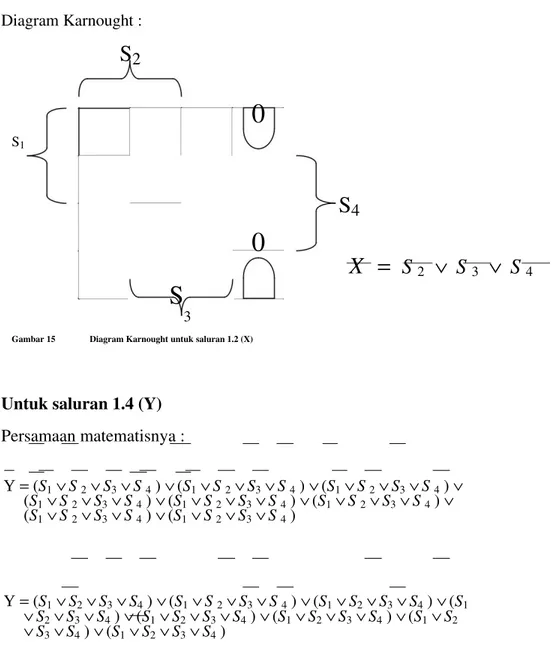
Diagram Karnought :
S
20
S10
S
3S
4X
S
2
S
3
S
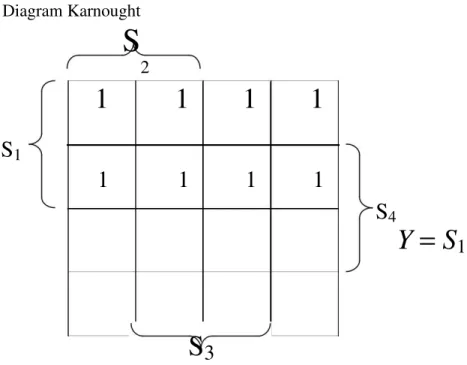
4 Gambar 15 Diagram Karnought untuk saluran 1.2 (X) Untuk saluran 1.4 (Y) Persamaan matematisnya : Y (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) (S1 S 2 S3 S 4 ) Y (S1 S2 S3 S4 ) (S1 S 2 S3 S 4 ) (S1 S2 S3 S4 ) (S1 S2 S3 S4 ) (S1 S2 S3 S4 ) (S1 S2 S3 S4 ) (S1 S2 S3 S4 ) (S1 S2 S3 S4 )Diagram Karnought
S
21
1
1
1
S
11
1
1
1
S
4Y
S
1
S
3
Gambar 16 Diagram Karnought untuk saluran 1.4 (Y) Cara Kerja Rangkaian Pada saat bus sedang menunggu penumpang di terminal, halte ataupun tempat tempat pemberhentian bus lainnya, maka pintu dikondisikan terbuka terus. Hal ini dimungkinkan dengan mengoperasikan katup 1S4. Ketika katup 1S4 dioperasikan, saluran 1 terbuka, saluran 3 tertutup, aliran udara dari saluran 1 ke saluran 2 menuju saluran 1.2 (X) pada katup 1V4 melalui katup 1V3. Aliran udara pada katup 1V4 adalah udara masuk saluran 1 keluar saluran 2 menuju saluran silinder bagian depan melalui katup 1V6. Udara mendorong silinder ke belakang (A). Udara dalam silinder bagian belakang didorong keluar menuju saluran 4 dan keluar saluran 5 pada katup 1V4 melalui katup 1V5. DenganPada saat kondisi pintu bus terbuka maksimal, akan mengaktifkan katup 1S1. Sehingga aliran udara pada katup 1S1 adalah saluran 1 terbuka, saluran 3 tertutup, udara mengalir dari saluran 1 ke saluran 2 dan selanjutnya diteruskan ke katup 1V1. Aliran udara ini akan mengaktifkan katup 1V1 sehingga udara dari kompresor akan mengalir ke katup 1V4 melalui saluran 1.4 (Y). Pada saat yang bersamaan, pada saluran 1.2 (X) masih terdapat udara mampat sehingga kondisi ini tidak akan mempengaruhi posisi katup 1V4. Posisi silinder masih dalam kondisi awal dan posisi pintu bus masih dalam keadaan terbuka terus. (lihat gambar 17) Silinder 1 A 1S1 1V5 1V6 1V4 4 2 1.4 (Y) 1.2 (Y) 5 3 1V3 1 1V1 1S4 Sopir 1S12 2 1 3 1 3 Gambar 17 Membuka pintu bus dengan menggunakan katup 1S4 Pada saat bus akan berangkat, sopir/kondektur bus harus menutup pintu bus terlebih dahulu. Untuk itu maka katup 1S4 harus dikembalikan ke posisi semula. Saluran 1 tertutup dan saluran 3 terbuka. Udara mampat pada saluran 1.2 (X) akan mengalir ke katup 1V3 menuju saluran 2 dan dibuang melalui saluran 3 pada katup 1S4. Akibatnya udara pada saluran 1.4 (Y)
akan mendorong katup 1V4 sehingga aliran udara pada katup 1V4 adalah
udara dari kompresor masuk saluran 1 diteruskan ke saluran 4 menuju katup 1V5 dan kemudian masuk ke saluran silinder bagian belakang. Udara
saluran 2 dan dibuang melalui saluran 3 pada katup 1V4. Dengan gerakan maju ini (A+), pintu bus akan segera tertutup (lihat gambar 18 ) Silinder 1 A 1S1 1V5 1V6 4 2 1V4 1.4 (Y) 1.2 (X) 5 3 1V3 1 1V1 1S1 2 1S4 2 Sopir 1 3 1 3 Gambar 18 Menutup pintu bus dengan menggunakan katup 1S4 Apabila di tengah perjalanan ada penumpang yang akan turun, maka untuk membuka pintu, penumpang tinggal menekan katup 1S2. Pada waktu katup 1S2 ditekan maka saluran 1 terbuka dan saluran 3 tertutup. Aliran udara dari saluran 1 menuju saluran 2 untuk selanjutnya diteruskan ke 1V2 dan 1V3, kemudian menuju ke katup 1V4 melalui saluran 1.2 (X). Aliran udara pada katup 1V4 udara masuk saluran 1 menuju saluran 2 kemudian diteruskan ke katup 1V6. Selanjutnya diteruskan ke silinder melalui saluran bagian depan. Udara mendorong silinder ke belakang. Udara pada bagian belakang silinder akan didorong ke luar melalui katup 1V5 menuju
saluran 4 dan dibuang melalui saluran 5. Silinder bergerak mundur (A) dan pintu bus terbuka (lihat gambar 19). Silinder 1 A 1S1 1V5 1V6 1V4 4 2 1.4 (Y) 1.2 (X) 5 3 1V3 1 1V2 1V1 Pintu bus 1S1 2 2 1S2 1 3 1 3 Gambar 19 Membuka pintu bus dengan menggunakan katup 1S2 Pada waktu pintu terbuka maksimal maka akan mengaktifkan katup 1S1. Dengan terbukanya katup 1S1, maka katup 1V1 akan mengalirkan udara dari kompresor menuju katup 1V4 melalui saluran 1.4 (Y). Pada saat udara masuk ke saluran 1.4 (Y), pada saluran 1.2 (X) tidak ada udara mampat karena pada saat katup 1S2 dilepas maka posisi akan kembali ke posisi awal. Sehingga udara pada saluran 1.2 (X) akan segera dibuang ke udara bebas melalui saluran 3 pada katup 1S2. Akibatnya silinder akan bergerak maju (A+) dan pintu bus akan segera menutup kembali (lihat gambar 20).
Silinder 1 A 1S1 1V5 1V6 1V4 4 2 1.4 (Y) 1.2 (X) 5 3 1 1V3 1V2 1V1 Pintu bus 2 1S1 2 1S2 1 3 1 3 Gambar 20 Menutup pintu bus dengan menggunakan katup 1S2 Apabila akan menaikkan penumpang di tengah perjalanan, maka untuk membuka pintu bus, dilakukan oleh sopir atau kondektur bus tersebut yaitu dengan cara menekan katup 1S3. Ketika katup ditekan, maka saluran 1 terbuka, saluran 3 tertutup, udara mengalir dari saluran 1 ke saluran 2 untuk selanjutnya diteruskan ke saluran 1.2 (X) pada katup 1V4 melalui
katup 1V2 dan katup 1V3. Aliran udara ini akan mengubah arah aliran pada
katup 1V4 yaitu udara masuk dari saluran 1 ke saluran 2 menuju katup 1V6. Selanjutnya masuk ke silinder melalui saluran bagian depan. Silinder
Silinder 1 A 1S1 1V1 1S1 2 1 3 1V5 1V6 1V4 4 2 1.4 (Y) 1.2 (X) 5 3 1 1V3 1V2 1S3 2 Sopir 1 3 Gambar 21 Membuka pintu bus dengan menggunakan katup 1S3
Pada saat pintu terbuka maksimal maka akan mengaktifkan katup 1S1 sehingga udara dari kompresor akan mengalir dari saluran 1 ke saluran 2 menuju katup 1V1. Dengan terbukanya katup 1V1, maka udara dari kompresor akan masuk ke katup 1V4 melalui saluran 1.4 (Y). Akibatnya
udara dari kompresor akan mengalir dari saluran 1 ke saluran 4 menuju katup 1V5 menuju silinder bagian belakang. Maka silinder akan bergerak
Silinder 1 A 1S1 1V5 4 2 1V4 1.4 (Y) 5 3 1V6 1.2 (X) 1V3 1 1V2 1V1 2 1S1 1S3 2 Sopir 1 3 1 3 Gambar 122 Menutup pintu bus dengan menggunakan katup 1S3
Fungsifungsi katup 1V5 dan 1V6 adalah untuk mengatur kecepatan gerak pintu bus pada saat membuka dan menutup.
Katup 1V1 merupakan katup tunda waktu. Katup ini berfungsi untuk
memberikan selang waktu pintu bus menutup kembali setelah pintu bus terbuka.
Sedangkan katup 1V2 dan 1V3 merupakan katup balik fungsi “ATAU” yang
jenis katup pneumatik menurut situasi dan kondisi pada saat pintu bus tersebut dioperasikan.
BAB IV ANALISA SISTEM KONTROL PNEUMATIK PADA PINTU BUS OTOMATIS Kompresor Kompresor yang dipilih adalah kompresor jenis torak dengan pertimbangan sebagai berikut :
1. Kompresor torak hampir tidak memerlukan perbaikan dibandingkan dengan kompresor berputar.
2. Untuk instalasi mobil maka untuk untuk jenis torak dengan kapasitas yang kecil masih menguntungkan (kurang dari 200 kg per m3 udara mampat efektif).
3. Sampai ukuran besar tertentu (kurang dari 10 m3/menit) merupakan mesin langkah ganda yang terbaik.
Tangki udara mampat
Ke sistem kontrol
Kompresor pneumatik
Ukuran Tangki Udara
Diket : Kapasitas kompresor = 145 l/min
= 145.103 m3/min. Banyaknya kontak/h= 20 Kerugian tekanan = 0,1 bar (10 kPa) Tabung yang digunakan mempunyai volume 0,12 m3 dengan tekanan 10 bar. Maka kapasitas tabung tersebut adalah : volume tabung x tekanan absolut = 0,12 x ((10+1)/1) = 1,32 m3 Besarnya tangki penyimpanan (berdasarkan diagram): VB = 1,2 m3 (lihat lampiran 5, Diagram Volum Simpan Tangki Udara) Perhitungan Silinder Data : Diameter dalam piston : d1 = 50 mm Diameter batang piston : d2 = 25 mm Panjang langkah piston : s = 300 mm Tekanan pengukuran : pe = 8 bar Efisiensi : = 0,8 (asumsi)
Apabila suhu udara setelah pemampatan adalah 40 C (asumsi), maka kandungan uap air jenuhnya = 51 g/m3 (lihat lampiran 3, Dew Point Curve) s 1 2 d d 1. Gaya gerak piston (F) F p .A.η .... ………….(Volker von der Heide/Franz Josef e Gambar 24 Penampang silinder kerja ganda Hölken, 2000 : 44) Dimana : F =gaya gerak piston (N) pe = tekanan pengukuran (N/cm2) A =luas penampang piston (cm2) = efisiensi a. Langkah Maju
F1 pe .A1.η Dimana : A1 = π .d1 2 4 = 0,785 . 52 = 19,625 cm2 pe = 8 bar = 8 .10 N/cm2 F1 = (8.10) . 19,625 . 0,8 = 1256 N b. Langkah Mundur F2 pe .A2 .η Dimana : A2 = π
d12 d 22
4 = 0,785 . (52 – 2,52) = 14,719 cm2 F2 = (8.10) . 14,719 . 0,8 = 942 N 2. Kebutuhan Udara Mampat (qv) Kebutuhan udara mampat untuk silinder kerja ganda digunakan persamaan sebagai berikutqv A.s.n.
p
e
p
amb .2 ………(Volker von der Heide/Franz Josefpamb Hölken, 2000 : 46) Dimana : qv = kebutuhan udara mapat (l/min) s = panjang langkah piston (dm) n = jumlah langkah tiap menit pamb = tekanan udara luar (bar) = 1 bar qv 0,19625.3.1.
8 1
.2 1 q v 10 ,598 l/min 3. Kecepatan Gerak Piston (v)qv v.A ……(Volker von der Heide/Franz JosefHölken, 2000 : 40) Dimana : v = kecepatan gerak piston (m/min) a. Langkah maju v1 qv 10,598.100 A1 19,625 v1 54,003 dm/min = 5,4 m/min b. Langkah mundur v2 qv 14,719 10,598.100 A2 v 2 72,002 dm/min = 7,2 m/min 4. Waktu yang dibutuhkan (t)
s
v
t
……..…(Volker von der Heide/Franz JosefHölken, 2000 : 228) Dimana : t = waktu yang dibutuhkana. Langkah maju t1 s 0,3 v1 5,4 t 1 0,056 menit = 3,36 detik b. Langkah mundur t2 s 0,3 v2 7,2 t 2 0,042 menit = 2,52 detik Kebutuhan KomponenKomponen Pneumatik Dalam pembuatan sistem kontrol pneumatik pada pintu bus otomatis dibutuhkan komponenkomponen pneumatik sebagai berikut : Tabel 3 Daftar kebutuhan komponenkomponen pneumatik
NO NAMA KOMPONEN JUMLAH KET.
1 Silinder kerja ganda 1 buah 2 Katup kontrol aliran satu arah 2 buah 3 Katup 5/2 untuk kontrol silinder, katup kontrol ganda 1 buah 4 Katup balik fungsi "ATAU" 2 buah 5 Katup tunda waktu 1 buah 6 Katup batas 3/2 dengan pegas pembalik 1 buah 7 Katup tombol 3/2 dengan pegas pembalik 2 buah 8 Katup tuas 3/2 dengan penahan 1 buah 9 Unit pelayanan udara 1 unit 10 Kompresor dan perlengkapannya 1 unit 11 Sambungan Tee 5 buah 12 Nipel/adaptor 37 buah 13 Peredam/silencer 7 buah 14 Selang pneumatik secukupnya
B A B V P E N U T U P A. Kesimpulan Sistem kontrol pneumatik pada pintu bus otomatis adalah suatu jenis sistem kontrol yang digunakan untuk mengendalikan gerak pintu bus secara otomatis dengan menggunakan jenis fluida udara mampat. Sistem kontrol ini merupakan salah satu alternatif pemecahan masalah untuk mengatasi kekurangankekurangan yang ada pada pintu bus sistem manual yang ada saat sekarang. Dengan dibuatnya sistem kontrol pneumatik ini maka akan diperoleh beberapa keuntungan antara lain :
1. Pintu bus otomatis dengan konstruksi yang sederhana karena komponenkomponen yang dibutuhkan sedikit dan murah.
2. Pintu bus yang mudah dioperasikan karena untuk membuka dan menutup pintu tersebut selain dapat dilakukan oleh sopir bus tersebut dengan cara menekan tombol katup, dapat dikontrol secara otomatis pada saat penumpang akan turun dan menginjak lantai di depan pintu bus, sehingga tidak merepotkan penumpang yang akan naik maupun turun bus tersebut karena tidak perlu membuka dan menutup pintu bus secara manual. 3. Mudah dalam hal perawatan dan pemeliharaan sistem kontrol pintu bus tersebut karena konstruksi pneumatik sederhana.
4. Memenuhi persyaratan keamanan dan keselamatan penumpangnya karena pintu bus tertutup dengan baik sehingga kecelakaan seperti terjatuh atau terlempar dari kendaraan dapat dihindari. B. Saran 1. Bagi dunia pendidikan : Pembuatan sistem kontrol pneumatik pada pintu bus otomatis merupakan salah satu contoh penggunaan udara mampat. Dengan adanya contoh ini diharapkan bagi dunia pendidikan lebih giat lagi dalam penelitian tentang kemungkinankemungkinan penggunaan udara mampat. 2. Bagi dunia usaha/industri : Agar dapat memanfaatkan sebaik mungkin teknologi teknologi yang ada khususnya tentang penggunaan udara mampat. Selain itu juga bagi dunia usaha/industri diharapkan partisipasinya dalam hal penelitian dan pengembangan teknologi yang dilaksanakan oleh dunia pendidikan mengingat keterbatasan keterbatasan yang ada pada dunia pendidikan.
DAFTAR PUSTAKA H. Meixner, E. Saver, 1989, Introduction to ElectroPneumatic, Esslingen : Festo Didactic KG. Joseph J Sullivan, Hadi Podo, 1996, Kamus Ungkapan InggrisIndonesia Dictionary of Idioms and Idiomatic Expressions, Jakarta : Gramedia Pustaka Utama. Peter Patient, Roy Pickup, Norman Powell, 1985, Pengantar Ilmu Teknik Pneumatika, Alih Bahasa Alex Tri Kantjono Widodo, Jakarta : Gramedia. Sisjono, 1997, Sistem Kontrol Nyumatik, Bandung : Departemen Pendidikan dan Kebudayaan Direktorat Jenderal Pendidikan Dasar dan Menengah Pusat Pengembangan Penataran Guru Teknologi Bandung. ______, 1999, Pneumatik dan Hidrolik Lanjut, Bandung : Departemen Pendidikan Nasional Direktorat Pendidikan Dasar dan Menengah Pusat Pengembangan Penataran Guru Teknologi Bandung. ______, Petrus Uty, 2001, Dasardasar Teknik Otomasi, Bandung : Departemen Pendidikan Nasional Direktorat Pendidikan Dasar dan Menegah Pusat Pengembangan Penataran Guru Teknologi Bandung. Sugihartono, 1992, Dasardasar Teknik Kontrol Pneumatik, Bandung : Divisi Pengembangan Bahan Belajar PPPG Teknologi Bandung. __________, 1995, Diagram Rangkaian Pneumatik, Bandung : Media Cetak PPPG Teknologi Bandung. S. Wojowasito, Tito Wasito W, 1980, Kamus Lengkap InggrisIndonesia Indonesia Inggris, Bandung : Penerbit Hasta. Suyanto, 2002, Kumpulan Modul Latihan Lewat Simulator Pneumatik Tingkat Dasar, Yogyakarta :Universitas Negeri Yogyakarta.
Thomas Krist, 1993, Dasar dasar Pneumatik, Alih Bahasa Dines Ginting, Jakarta :Erlangga.
Tim Penulis, Pneumatik, Jakarta : Festo Didactic
Volker von der Heide, FranzJosef Hölken, Arbeitsbuch Steuerungstechnik Metall Lehrerhandbuch,
Lampiran 1
MECHANICAL VALVE 1
Lampiran 2
MECHANICAL VALVE 2
Lampiran 3
DEW POINT CURVE
Lampiran 4
BATAS-BATAS EKONOMIS PNEUMATIK DAN HIDROLIK
Lampiran 5
DIAGRAM VOLUM SIMPAN TANGKI UDARA
Lampiran