Kontrol Tracking Pada Quadrotor Menggunakan Nonlinear Quadratic Tracking Dengan Extended Kalman Filter - ITS Repository
Teks penuh
Gambar


Dokumen terkait
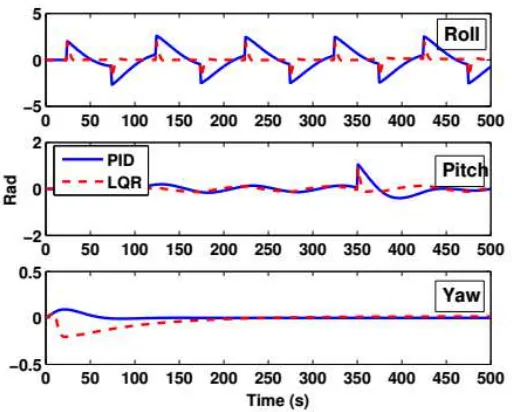
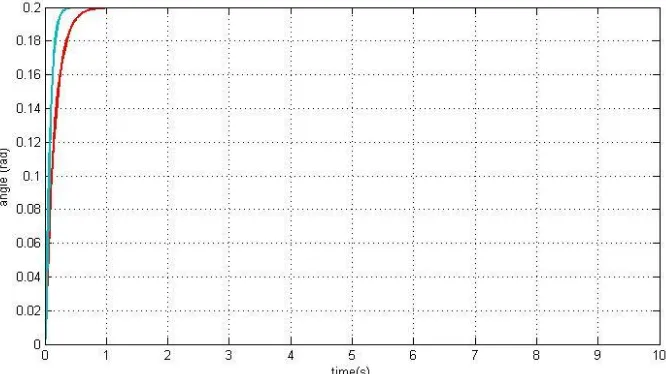
Kecepatan respon sudut roll lebih cepat dari pada kecepatan respon sudut pitch namun dengan data rise time yang didapat baik pada sudut roll maupun sudut pitch, mampu
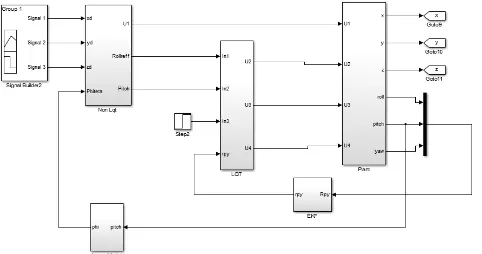
Kontroler output feedback dengan CGT-MF dapat membawa quadcopter mengikuti referensi yang diberikan, dan menghasilkan path following yang kecil pada saat terdapat gangguan.
Pada penelitian tersebut menyatakan bahwa estimasi dari model dinamis pelacakan radar yang terdiri dari model tak linier telah menunjukkan hasil estimasi yang lebih baik dari
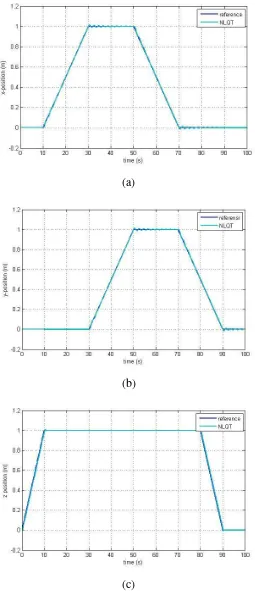
Berdasarkan data pada Gambar 4.17, untuk respon posisi tracking lintasan pada sumbu-Y, pada tracking pertama, diketahui bahwa saat langkah kedua hingga ketiga dilakukan,
Oleh karena itu dapat disimpulkan bahwa pada periode 0-25 detik (pada saat sistem tidak diberi gangguan beban) respon sistem dengan kontroler PI yang dioptimisasi dengan PSO
Dengan menerapkan metode kalman filter untuk menghambat perubahan nilai atau noise yang terjadi pada sensor, penulis berharap hasil dari filter nilai mentah atau nilai asli
Dengan menerapkan metode kalman filter untuk menghambat perubahan nilai atau noise yang terjadi pada sensor, penulis berharap hasil dari filter nilai mentah atau nilai asli
Pada Gambar 18 terlihat respon air fuel ratio sistem tanpa kontroler kurang bagus karena tidak dapat mempertahankan nilai set point 14,67 ketika diberi gangguan
