SDM dan Teknologi Energi Terbarukan Di Indonesia
Jakarta, 25 Mei 2016
vi
DAFTAR ISI
PROSIDING i
DISCLAIMER ii
SUSUNAN PANITIA iii
SEKRETARIAT iv
KATA PENGANTAR v
DAFTAR ISI vi
KELOMPOK PENDIDIKAN (PEND)
PEND-01 EVALUASI PELAKSANAAN UJI KOMPETENSI PADA SEKOLAH MENENGAH KEJURUAN (SMK) DALAM MENINGKATKAN KOMPETENSI SUMBER DAYA MANUSIA DI BIDANG TEKNOLOGI DAN REKAYASA
Tuti Suartini, Aan Sukandar
1
PEND-02 EFEKTIFITAS MEDIA PEMBELAJARAN SINKRONISASI ANTARA MATA PELAJARAN MATEMATIKA DAN DASAR-DASAR LOGIKA REKAYASA PERANGKAT LUNAK DI SMK Muhammad Chusni Agus
6
PEND-03 MODEL PEMBELAJARAN DI LABORATORIUM SMK BERBASIS ISO 9001 :2008 DALAM KESIAPAN LULUSAN MEMASUKI MEA 2016
Mukhidin, Bachtiar Hasan, T. Suartini, A. Sukandar
13
PEND-04 PENGEMBANGAN EMPLOYABILITY SKILL MELALUI PROJECT BASED LEARNING SEBAGAI UPAYA MENCETAK SISWA SMK SIAP KERJA
Sunardi, Purnomo, Eddy Sutadji
18
PEND-05 PENERAPAN PETA PEMIKIRAN UNTUK MENINGKATKAN PEMAHAMAN MAHASISWA TERHADAP KETRAMPILAN MENGAJAR DI PROGRAM STUDI PENDIDIKAN TEKNIK MESIN UNIVERSITAS PALANGKA RAYA
Debora
24
PEND-06 PENGEMBANGAN PEMBELAJARAN PEMESINAN BERBASIS PROYEK DALAM MENINGKATKAN PENGETAHUAN METAKOGNITIF SISWA DI SMK
Asep Hadian Sasmita
28
PEND-07 PENINGKATAN HASIL BELAJAR MAHASISWA DALAM MATA KULIAH MEKANIKA FLUIDA MELALUI METODE JIGSAW
Supria Wiganda
32
PEND-08 PENGARUH PENERAPAN MODEL PEMBELAJARAN PROBLEM BASED LEARNING DAN PROJECT BASED LEARNING DALAM PENINGKATAN KOMPETENSI KOGNITIF PADA MATA PELAJARAN PEMELIHARAAN MESIN KENDARAAN RINGAN KELAS XI TKR DI SMK NEGERI 1 RENGASDENGKLOK
vii
Susilawati, Siti Sahara, Agung Premono, Ferry Budhi Susetyo
PEND-09 PENINGKATAN KETERAMPILAN MENGUKUR SILINDER BLOK MESINDENGAN MEMANFAATKAN ALAT UKUR MEKANIKDAN BERKOLABORASI DI SMK NEGERI KABUPTEN BEKASI
Iman Darmadi, Arif Muttaqin, Agung Premono, Ferry Budhi Susetyo
44
PEND-10 ICT BASIS KURIKULUM 2013 UNTUK PENDIDIKAN ABAD 21 C. Rudy Prihantoro
50
PEND-11 PENGARUH PEMBELAJARAN BERBASIS MASALAH TERHADAP PENINGKATAN KEMAMPUAN PEMECAHAN MASALAH MAHASISWA
Gaguk Margono, Adhika Wahyu Nur Hidayat
54
PEND-12 UPAYA MENINGKATKAN KEMAMPUAN MAHASISWA DALAM PENGUASAAN KONSEP PENGUATAN LOGAM
Y a y a t
60
KELOMPOK MANUFAKTUR (MAN)
MAN-01 KEMAMPUAN INDUSTRI MANUFAKTUR GENERATOR DI INDONESIA UNTUK MENDUKUNG PROGRAM PEMBANGUNAN PEMBANGKIT LISTRIK 35.000 MW
Asep Andi Suryandi, Katri Yulianto
65
MAN-02 PENGARUH PROSES EXTRUDE DAN EXPAND TERHADA KEKERASAN DAN ALIRAN SERAT (FIBER-FLOW) PADA PIPA BAJA STAM 390G
Qamaruddin, Syaeful Aziz
71
MAN-03 STUDI AWAL PEMANFAATAN BAHAN BAKU LOKAL UNTUK MEMBUAT BUSA RAMAH LINGKUNGAN SEBAGAI PEMADAM API PADA KEBAKARAN LAHAN GAMBUT
Purwo Subekti
75
MAN-04 PENGARUH KECEPATAN PENGELASAN MIG POSISI 1G TERHADAP KEKERASAN PIPA SC-80
Ferry Budhi Susetyo, Syaripuddin, Rishi Nur Maret
80
KELOMPOK OTOMOTIF (OTO)
OTO-01 ANALISIS KESESUAIAN MOTOR TRAKSI KAPASITAS 90 KW PADA BUS LISTRIK UKURAN SEDANG TERHADAP REGULASI PEMERINTAH TENTANG KENDARAAN
Febryan Maulana, Dwi Jaya Febriansyah
86
OTO-02 STUDI BEBAN AERODINAMIS TERHADAP STABILITAS ARAH KENDARAAN
I Ketut Adi Atmika
viii
OTO-03
UNJUK KERJA MESIN PADA SEPEDA MOTOR SISTEM FUEL INJECTION
Ragil Sukarno
96
KELOMPOK KONVERSI ENERGI (KE)
KE-01 SEBUAH RANCANGAN MODEL NUMERIK UNTUK MEMPELAJARI ARUS LAUT SEBAGAI PEMBANGKIT LISTRIK TENAGA ARUS LAUT DI SELAT BANGKA SULAWESI UTARA Parabelem Tinno Dolf Rompas, Heindrich Taunaumang, Ferry Jhony Sangari
103
KE-02 SIMULASI NUMERIK PENGEMBANGAN TASH BERBASIS SUDU SANDIA-SERI-8 SETARA 20 KW
Sugianto
108
KE-03 PENGUKURAN KONDUKTIVITAS TERMAL BEBERAPA JENIS KAYU PRODUKSI LOKAL UNTUK BAHAN BANGUNAN Woro Sundari, Matheus M. Dwinanto
115
KE-04 STUDI AWAL PENGOLAHAN AIR LINDI DARI GASIFIKASI ANAEROB LANDFILL TEMPAT PEMBUANGAN SAMPAH AKHIR BAGENDUNG- CILEGON
NK Caturwati, Mekro P, Dhimas Satria, Muslim Hanif
119
KE-05 STUDI EKSPERIMENTAL PENGARUH JENIS AIRFOIL NACA 0024 TERHADAP KINERJA TURBIN ACHARD DENGAN VARIASI LEBAR INLET ALIRAN PADA PLTMH (PEMBANGKIT LISTRIK TENAGA MIKROHIDRO)
Mahmud Akhyar
124
KE-06 ANALISIS PLANT HEAT RATE PLTU SEBELUM FIRST YEAR INSPECTION TERHADAP KONDISI KOMISIONING TES PADA PLTU DI PROVINSI JAWA BARAT
Sorimuda Harahap, Eko Prasetyo, Hanafi Arnanda Rifky
131
KE-07 OPTIMASI SUDUT SUDU TURBIN AIR OPENFLUME 500 WATT SECARA NUMERIK
Budiarso, Ahmad Indra Siswantara, Andika Bakti Wijaya, Dimas Arif Fadilah
135
KE-08 PENGARUH JARAK KATUP LIMBAH DAN KATUP PENGHANTAR KE BADAN POMPA HIDRAM TERHADAP UNJUK KERJA POMPA HIDRAM
Sehat Abdi Saragih, M. Natsir Darin, Idham Waliono
141
KE-09 PENGARUH PENAMBAHAN FIN PADA SUDU TERHADAP PERFORMA TURBIN ANGIN SAVONIUS
Ridwan, Andrian
OTO-02
Seminar Nasional Mesin dan Teknologi Kejuruan, 25 Mei 2016 91
STUDI BEBAN AERODINAMIS
TERHADAP STABILITAS ARAH KENDARAAN
I Ketut Adi Atmika
Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali,
Telp/fax : (0361) 703321, email: [email protected].
ABSTRAK
Beban aerodinamis atau gaya dan momen angin pada kendaraan dapat mempengaruhi kinerja kestabilan arah kendaraan. Seberapa besar pengaruhnya tentunya tergantung dari kondisi beban angin itu sendiri dan kondisi operasi kendaraan. Penelitian ini dititik beratkan pada bagaimana memformulasikan beban dan momen aerodinamis dalam suatu plant kinerja perilaku arah kendaraan. Analisa gerak kendaraan menggunakan metode Quasi Dinamik dan disimulasikan pada kondisi jalan datar dan jalan miring. Besarnya pengaruh beban aerodinamis terhadap stabilitas arah kendaraan pada kondisi jalan datar dan jalan miring berkisar antara 0 sampai dengan 0,00399 ditunjukkan oleh nilai yaw. Sedangkan sifat belok kendaraan awalnya understeer, kemudian dengan bertambahnya sudut steer tahap tertentu mengalami oversteer.
Kata kunci : aerodinamis, stabilitas arah kendaraan, metode Quasi Dinamik, yaw, understeer, oversteer
1. PENDAHULUAN
Mobil atau kendaraan yang bergerak dalam udara atmosfir dipengaruhi oleh adanya interaksi antara mobil dengan jalan. Kendaraan akan mengalami gaya-gaya aerodinamika yang besar serta arahnya tergantung pada kecepatan relatif antara udara dengan kendaraan itu sendiri. Didalam pendekatan terhadap aerodinamika kendaraan, diasumsikan tidak ada angin yang berhembus (atmosfer sebagai kesatuan dengan tanah) dan kecepatan kendaraan dapat dianggap konstan.
Pada dasarnya semua fenomena aerodinamis yang terjadi pada kendaraan disebabkan adanya gerakan relatif dari udara di sepanjang bentuk bodi kendaraan. Streamline adalah garis-garis yang dibuat sedemikian rupa di dalam medan kecepatan, sehingga setiap saat garis-garis tersebut akan searah dengan aliran di setiap titik di dalam medan aliran tersebut. Dengan demikian streamline-streamline itu akan membentuk pola aliran udara di sekeliling bodi kendaraan. Streamline pada tempat yang jauh dari kendaraan akan sejajar dan tidak terganggu. Sedangkan streamline disekitar kendaraan akan mempunyai pola aliran yang sangat komplek dikarenakan bentuk kendaraan itu sendiri yang kompleks sehingga di sekeliling kendaraan akan terdapat daerah gangguan aliran udara. Dengan demikian dapat dikatakan bahwa gerakan dari partikel yang terletak jauh dari kendaraan akan memiliki kecepatan relatif yang sama dengan kecepatan kendaraan. Sedangkan pada daerah gangguan di sekeliling kendaraan, maka kecepatan relatif dari partikel sangat bervariasi, lebih besar atau lebih kecil dari kecepatan aktual kendaraan [1].
Permasalahan beban aerodinamis atau beban angin pada kendaraan akan disederhanakan dengan melihat posisi Centre of Pressure (CP) pada kendaraan, kemudian analisa gerak kendaraan difokuskan pada Center of Grafity (CG). Dengan demikian kita akan memformulasikan semua beban angin tersebut ke dalam analisa gerak kendaraan. 2. METODE
Penelitian ini dilakukan dengan metode simulasi komputer. Langkah pertama adalah pemodelan kendaraan secara lengkap dengan delapan derajat kebebasan. Formulasi beban dan momen aerodinamis dibuat dalam suatu plant kinerja perilaku arah kendaraan. Analisa gerak kendaraan menggunakan metode Quasi Dinamik dan disimulasikan pada kondisi jalan datar dan jalan miring.
2.1. Gambaran CP terhadap CG
Analisa gerak kendaraan difokuskan pada Centre of Grafity (CG), sedangkan beban aerodinamis bekerja pada Centre of Pressure (CP), dengan demikian dibuat formulasi beban aerodinamis tersebut ketika kita menganalisa gerak kendaraan. Gambaran posisi CP terhadap CG ditunjukkan pada gambar 1.
OTO-02
Seminar Nasional Mesin dan Teknologi Kejuruan, 25 Mei 2016 92 Gambar 1. Posisi CP terhadap CG
2.2. Gaya dan Momen Aerodinamis
Resultan dari gaya aerodinamik diuraikan dalam tiga komponen gaya sebagai berikut [2}:
Gaya hambat aerodinamik FD
(Aerodynamic drag force), dengan garis kerja horizontal, dan berlawanan arah dengan arah gerak kendaraan.
Gaya angkat aerodinamik FL
(Aerodynamic lift force), yang bekerja dengan arah vertikal ke atas.
Jika aliran udara tidak sejajar dengan bidang simetri bodi kendaraan, pola aliran udara akan tidak simetris. Hal ini akan menyebabkan timbulnya komponen gaya aerodinamik yang bekerja dalam bidang horizontal tapi dengan arah kanan terhadap gaya hambat dan gaya angkat. Gaya ini disebut dengan gaya samping aerodinamik FS(Aerodynamic side force).
Komponen dari gaya aerodinamik ini dapat dituliskan sebagai berikut :
Untuk gaya hambat ( DragForce ) : (1)
Untuk gaya angkat ( Lift force ) :
L fb a L A C V F 2 2 (2)
Untuk gaya samping ( Side Force ) :
S fs a S A C V F 2 2 (3) Dimana:
Va= kecepatan relatif angin terhadap
kendaraan
Af = luasan bagian depan pada kendaraan.
Afb= luasan bagian bawah (base) pada
kendaraan.
Afs= luasan bagian samping pada
kendaraan.
Kemudian karena analisa dinamika kendaraan yang difokuskan pada CG, maka akan melibatkan
momen yang disebut momen aerodinamik. Momen ini dapat diuraikan juga menjadi tiga komponen, yaitu :
Momen Rolling Aerodinamik (MR)
Momen rolling MR, disebabkan oleh gaya
samping Fs(side force) yang bekerja pada
jarak Zc dan gaya angkat FL (lift force)
yang bekerja pada jarak ycdari Centre of
Gravity.
MR= FLyc FSZc (4)
Momen Pitching Aerodinamik (MP)
Momen pitching MP, disebabkan oleh
adanya gaya hambat FD(drag force) yang
bekerja pada jarak Zc dan gaya angkat FL
(lift force) yang bekerja pada jarak xcdari
Centre of Gravity.
MP= -FL xc - FD zc (5)
Momen Yawing Aerodinamik (MY)
Momen yawing MY, disebabkan oleh
adanya gaya hambat FD(drag force) yang
bekerja pada jarak ycdan gaya samping Fs
(side force) pada jarak xc dari Centre of
Gravity kendaraan.
MY= FD yc + FS xc (6)
2.3. Sudut Slip
Analisa gerak kendaraan difokuskan pada kondisi jalan belok, karena pada kondisi ini adalah keadaan paling kritis untuk gerak kendaraan. Seperti diketahui bahwa pada kondisi belok, akan timbul gaya centrifugal yang akan menyebabkan terjadinya sudut slip pada ban. Sudut slip inilah yang mempengaruhi perilaku arah kendaraan. Dengan demikian fokus perhitungan disini bermula dari bagaimana kita mendapatkan besarnya sudut slip pada masing-masing ban.
Sudut slip dipengaruhi oleh banyak faktor diantaranya, keausan ban (A), konstruksi ban (K), gaya normal (Fz), gaya lateral (Fy), dan gaya longitudinal (Fx). Dari gambaran diatas fokus kita adalah mencari besarnya gaya normal, gaya lateral, dan gaya longitudinal yang bekerja pada masing-masing ban dengan memasukkan beban aerodinamis, kemudian pengaruhnya terhadap sudut slip. Besarnya sudut slip untuk ban bias baru ditunjukkan pada persamaan 7 [3].
(7) dimana :
Crp= 33,5 + 5,30 (P) 0,0916 (P)2
Crs= 33,5 + 5,30 (Ps) 0,0916 (Ps) 2
P = tekanan ban pada kondisi operasi (psi) Ps= tekanan ban standar (25 psi)
474998 , 0 1 xi i y rxi (8) 474998 , 0 1 1398 , 161 i y roi F C (9)
OTO-02
Seminar Nasional Mesin dan Teknologi Kejuruan, 25 Mei 2016 93 2.4. Understeer dan Oversteer
Salah satu terminologi dalam menentukan sifat pengendalian kendaraan adalah understeer dan oversteer. Pengertian ini telah menjadi sumber dalam menggali lebih lanjut sifat-sifat pengendalian kendaraan. Pengertian ini berkembang mulai tahun 1930.
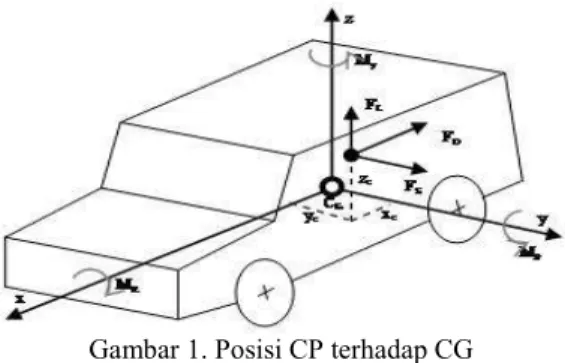
Konsep ini dapat dijelaskan dengan memperhatikan gambar 2, dengan menyederhanakan pasangan ban pada poros kendaraan.
Gambar 2.Pasangan roda yang disederhanakan [3]. Karakteristik pengendalian dari kendaraan tergantung kepada hubungan antara sudut slip yang terjadi pada ban depan dan ban belakang kendaraan.
Dari standar geometri, hubungan antara sudut steer pada ban depan ( f), radius putar (R), whell
base (L), dan sudut slip pada ban depan dan ban belakang fdan radalah :
(10)
(11) dimana Kus adalah konstanta understeer yang
harganya dinyatakan dalam radian.
Apabila harga Kus adalah positif,yang berarti
bahwa sudut slip ban depan lebih besar dari sudut slip pada ban belakang, sudut steer f yang
dibutuhkan untuk menjalani lintasan yang telah ditentukan bertambah dengan akurat dari kecepatan kendaraan. Kendaraan dengan sifat seperti ini disebut understeer.
Jika harga Kus adalah negatif, artinya sudut
slip pada roda depan f lebih kecil dari sudut slip
pada roda belakang r ( f < r), sudut steer yang
dibutuhkan untuk menjalani lintasan yang diberikan berkurang dengan pertambahan kecepatan kendaraan. Kendaraan dengan sifat pengendalian seperti ini disebut dengan oversteer.
Dengan demikian dapat diberikan suatu pengertian yaitu understeer adalah prilaku kendaraan yang amat sulit untuk dibelokan, sedangkan oversteer adalah prilaku kendaraan yang amat susah dikendalikan.
Apabila harga Kus= 0, yang artinya sudut slip
pada roda depan dan belakang berharga sama ( f= r), sudut steer ( f) yang dibutuhkan untuk
menjalani lintasan yang ditentukan tidak tergantung kepada kecepatan kendaraan dan dirumuskan :
(12) Kendaraan dengan sifat pengendalian seperti ini disebut dengan netral steer.
Untuk kendaraan belok, gerakan berputar atau yawing (Yr) adalah parameter penting untuk
ditinjau.
= (13)
2.5 Metode Kalkulasi Quasi Dinamik
Analisa prilaku arah kendaraan memamfaatkan konsep atau metode Kalkulasi Quasi Dinamik [3], [4], dimana dalam proses kalkulasi ini, kendaraan dalam gerakan dinamis dianalisa seolah-olah sebagian dalam keadaan statis, dengan demikian ini disebut sebagai quasi dinamik atau quasi static serta dalam analisa perhitungan akan dibantu dengan menggunakan program komputer.
3. HASIL DAN DISKUSI 3.1. Data Model Kendaraan Uji
Kendaraan yang dipakai sebagai model uji dengan spesifikasi:
Berat Total (Wt) = 10878 N
Panjang Wheel Base (L) = 2.15 m Tinggi titik berat (ht) = 0.6 m
Jarak CG dari poros depan (a) = 1,375 m Lebar track Depan (Tf) = 1.3 m
Lebar track Belakang (Tr) = 1.3 m
Berat Sprung (Ws) = 6389,6 N Unsprung
Berat depan (Wuf) = 1514,1 N
Berat belakang (Wur) = 1658,16 N
Tinggi titik berat depan (huf) = 0.325 m
Tinggi titik berat belakang (hur) = 0.325
m
OTO-02
Seminar Nasional Mesin dan Teknologi Kejuruan, 25 Mei 2016 94 Sumbu rolling :
Tinggi bagian depan (hf) = 0.19 m
Tinggi bagian belakang (hr) = 0.21 m
Roda (ban radial Baru)
Kekakuan ban depan (Rtf) = 4000 N/m
Kekakuan ban belakang (Rtr) = 6000 N/m
Berat ban (W1, W2, W3, W4) = 250 N
Suspensi
Konstanta pegas depan (Rsf) = 46700,46
N/m
Konstanta pegas belakang (Rsr) =
64003,14 N/m
Muatan (Wl) = 2744 N
3.2. Hasil dan Analisa
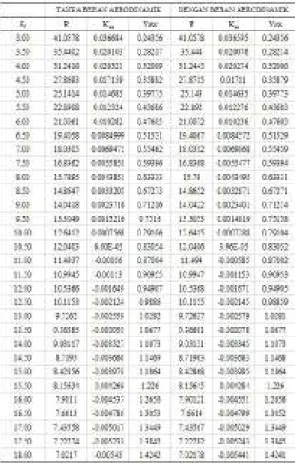
Gambaran pengaruh beban aerodinamik terhadap prilaku kendaraan (R, Kusdan Yaw) yaitu
dapat dilihat pada tabel 1 dan tabel 2 .
Tabel 1. Nilai R, Kus, dan Yaw pada kondisi jalan datar
Pada tabel 1, besarnya nilai R tanpa beban pada jalan datar lebih kecil dibandingkan dengan R yang berbeban sedangkan Kus tanpa beban lebih
besar dibandingkan dengan yang berbeban di tiap tahap demi tahapnya begitu juga untuk besarnya
nilai Yaw tanpa beban lebih besar daripada Yaw berbeban aerodinamik.
Tiap tahapan sudut steer yang diberikan mempunyai selisih nilai yang relatif kecil diantara keduanya. Sudut steer yang diberikan tahap demi tahap pada jalan datar diatas menunjukkan besarnya radius belok (R) dan Kus semakin mengecil
sedangkan besarnya Yaw semakin membesar. Nilai Kus yang semakin mengecil tiap tahapnya dimana
nilai tiap sudut steer yang diberikan nilai Kusadalah
positif ini berarti kendaraan mengalami understeer (susah dibelokkan) sedangkan jika nilainya negatif kendaraan mengalami susah dikendalikan (oversteer).
Pada tabel 2, besarnya nilai R tanpa beban pada jalan miring lebih kecil dibandingkan dengan R yang berbeban sedangkan Kus dan Yaw tanpa
beban lebih besar dibandingkan dengan yang berbeban di tiap tahap penambahan sudut steernya namun selisih yang ditunjukkan pada tabel menunjukkan selisih nilainya yang tidak terlalu besar.
Tabel 2. Nilai R, Kus, dan Yaw pada kondisi jalan miring
Pada sudut steer yang diberikan tahap demi tahap menunjukkan besarnya radius belok (R) dan Kus semakin mengecil sedangkan besarnya Yaw
semakin membesar. Nilai Kus yang semakin
OTO-02
Seminar Nasional Mesin dan Teknologi Kejuruan, 25 Mei 2016 95 yang diberikan pada kendaraan adalah positif, ini
berarti kendaraan mengalami sifat understeer sedangkan jika nilainya negatif kendaraan mengalami oversteer [5].
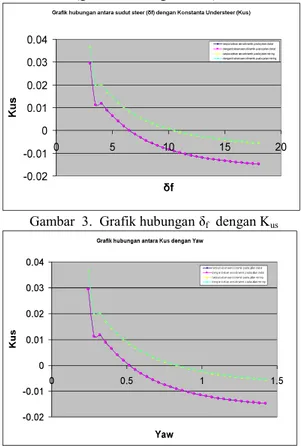
Dari selisih nilai tersebut di atas, semakin kecil Kus mengakibatkan kendaraan akan susah
dikendalikan maka dari hasil diatas kendaraan yang diberi beban aerodinamik akan lebih cepat mengalami oversteer dibandingkan tanpa beban aerodinamik (gambar 3 dan gambar 4).
Gambar 3. Grafik hubungan f dengan Kus
Gambar 4. Grafik hubungan Kus denganYaw
4. KESIMPULAN
Berdasarkan hasil dan analisa, maka ada beberapa hal dapat disimpulkan:
Besarnya pengaruh beban aerodinamik terhadap prilaku arah kendaraan pada semua kondisi adalah sebesar 0 sampai dengan 0,00399 .
Semakin besar sudut steer yang diberikan maka nilai R dan Kussemakin
mengecil dimana nilai R adalah 0,020079 sampai dengan 5,6879, nilai Kus antara 0,000167 sampai dengan
0,01828 sedangkan nilai yaw yang terjadi pada kendaraan semakin besar yaitu 0,0394 sampai dengan 0,0399. Besarnya nilai Kusdan Yaw tanpa beban
aerodinamik (pada jalan datar dan jalan miring) lebih besar dibandingkan dengan yang berbeban aerodinamik yaitu nilai Kus= 9. 10-6sampai dengan
4,49. 10-5dan nilai Yaw antara 0 sampai dengan 3.10-5. Sedangkan nilai R tanpa beban aerodinamik lebih kecil dibandingkan nilai R yang berbeban aerodinamik.
Sifat belok kendaraan pada awalnya mengalami understeer (susah dibelokkan) yang kemudian pada penambahan sudut steer tahap tertentu mengalami oversteer (susah dikendalikan)
REFERENSI
[1] Wolf-Heinrich, Hucho, Aerodynamics of Road Vehicles, London, Butterwort (1987).
[2] Katsunori Fujihashi, Kenji Okumura, Analysis of Vehicle Stability in Crosswinds, Jepang, (2000).
[3] Sutantra I Nyoman, Teknologi Otomotif Teori dan Aplikasinya, Guna Widya, Surabaya, (2001).
[4] Kou Sasaki, Yoshiaki Utsugi, Koichi Uchikawa, Tetsuo Fujinuki, Hiroshi Nagasawa, Vehicle Dynamics Simulation Using Flexible Body, Jepang, (2000). [5] Kihong Park, Determining Reference
Yaw Rate and Side Slip Angle for Use in Vehicle Dynamics Control Systems, Proceeding FISITA Word Automotive Congress (FISITA 34), Beijing, (2012).
t anpa beban aerodinamik pada jalan dat ar dengan beban aerodinamik pada jalan dat ar t anpa beban aerodinamik pada jalan miring dengan beban aerodinamik pada jalan miring
![Gambar 2.Pasangan roda yang disederhanakan [3].](https://thumb-ap.123doks.com/thumbv2/123dok/2234395.3557617/7.918.159.442.256.614/gambar-pasangan-roda-yang-disederhanakan.webp)