Semester Genap 2010/2011
Synchronous Motor
Dosen Pembimbing : Chairul Hudaya, M.Eng.
Disusun oleh:
Cakra Wirabuana 0806365570 Febi Hadi Permana 0806365753 Handy Hermawan 0806365873 Ihin Solihin 0806365923
DEPARTEMEN TEKNIK ELEKTRO
UNIVERSITAS INDONESIA
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Allah SWT, karena dengan berkah-Nya sehingga penulis dapat merampungkan makalah yang berjudul ‘Synchronous Motor’ ini.
Makalah ini sendiri dikerjakan sebagai salah satu tugas dari mata kuliah Teknik Tenaga Listrik. Makalah ini bersumber dari Buku-Buku referensi kuliah dan referensi dari internet yang berhubungan dengan Synchronous Motor.
Makalah ini masih jauh dari sempurna, dan penulis menyadari bahwa makalah ini mungkin masih terdapat kekurangan. Oleh karena itu, penulis sangat berterima kasih bila ada koreksi yang bersifat membangun untuk penyempurnaan makalah ini dimasa mendatang. Besar harapan penulis bahwa makalah ini dapat memberi manfaat kepada bangsa dan negara. Amin...
April, 2010
DAFTAR ISI KATA PENGANTAR ... 1 DAFTAR ISI ... 1i BAB 1 PENDAHULUAN ... 4 1.1 Latar Belakang ... 4 1.2 Tujuan Penulisan ... 5 1.4 Manfaat Penulisan ... 5
BAB 2 DASAR TEORI ... 6
2.1 Pengertian Dasar Motor Sinkron ... 6
2.2 Prinsip Kerja Motor Sinkron ... 7
2.3 Keuntungan dari Motor Sinkron ... 9
BAB 3 KONTRUKSI MOTOR SINKRON ... 10
3.1 Karakteristik dan Fitur Motor Sinkron ... 10
3.2 Karakteristik dan Fitur Motor Sinkron ... 10
3.3 Detail dari Amortissseur Winding ... 11
3.4 Sistem Tipe Brush Excitation ... 12
BAB 4 Prinsip Motor Sinkron dan Power Factor ... 15
4.1 Syncronous Prinsiple ... 15
4.2 Power Factor ... 16
BAB 5 KESIMPULAN DAN SARAN ... 19
5.1 Kesimpulan ... 19
5.2 Saran ... ... 19
ABSTAKSI
Motor sinkron (motor arus bolak-balik) adalah suatu mesin yang berfungsi mengubah energi listrik arus bolak-baik (AC) menjadi energi gerak atau mekanik berupa putaran rotor. Motor arus bolak-balik terdiri dari dua bagian yaitu bagian yang diam (stator) dan bagian yang bergerak (rotor).
Jika dibandingkan antara motor induksi dan motor sinkron, terdapat perbedaan yang sangat prinsipil pada karakteristik berbeban pada kedua jenis motor ini. Pada motor induksi, penambahan beban akan menyebabkan kecepatan putar motor akan berkurang. Berkurangnya kecepatan mengurangi GGL lawan sehingga tambahan arus akan ditarik dari sumber untuk menggerakkan beban yang bertambah agar kecepatan putar kembali seperti semula.
Pada motor sinkron, hal ini tidak terjadi karena ketika masih bekerja maka rotor motor sinkron akan selalu terikat atau terkopel secara magnetis dengan medan putar dan dipaksa untuk turut berputar dengan kecepatan sinkronnya. Dengan demikian, penambahan beban tidak berpengaruh terhadap putaran motor. Namun jika penambahan beban melebihi batas kekuatan kopel rotor dan medan putar stator maka rotor motor akan berhenti bekerja.
Dalam makalah ini akan dijelaskan tentang konsep dari motor sinkron, prinsip kerja berikut dengan kelebihan dari Motor sinkron dibanding dengan motor induksi.
BAB I PENDAHULUAN
1.1. Latar Belakang
Motor arus bolak-balik (motor AC) adalah suatu mesin yang berfungsi untuk mengubah energi listrik arus bolak-balik menjadi energi gerak atau energi mekanik berupa putaran rotor. Salah satu jenis motor arus bolak-balik adalah motor sinkron/serempak tiga phasa. Dikatakan motor sinkron tiga phasa karena motor ini beroperasi pada sumber tegangan tiga phasa. Dan dikatakan motor sinkron karena putaran medan stator (medan putar) dan putaran rotor serempak/sinkron.
Motor sinkron pada pengoperasiannya tidak dapat melakukan start awal (self starting), oleh karena itu motor sinkron tiga phasa membutuhkan penggerak mula (prime mover) untuk memutar medan pada stator sampai pada kecepatan putar medan putar stator.
Pada motor sinkron, perubahan beban tidak mempengaruhi kecepatan putar motor karena ketika motor masih bekerja maka rotor akan selalu terikat atau terkopel secara magnetis dengan medan putar dan dipaksa untuk berputar dengan kecepatan sinkronnya. Karena demikian, motor sinkron biasanya digunakan pada sistem operasi yang membutuhkan kecepatan konstan dengan beban yang berubah-ubah. Contohnya Rolling Mills, Mesin Penghancur (Crusher), Pulp Grinders, Reciprocating Pump dan lain-lain.
Dengan demikian kita perlu mempelajari konsep dari motor sinkron, dimana motor sinkron ini dapat menjadi suatu pilihan yang tepat untuk sistem operasi yang membutuhkan kecepatan yang konstan dengan beban yang berubah-ubah.
Berdasarkan hal tersebut penulis akan menjelaskan konsep dari Motor Sinkron yang merupakan Tugas dari Mata Kuliah Teknik Tenaga Listrik
1.2. Tujuan Penulisan
Makalah ini bertujuan untuk memberikan gambaran dan pengetahuan tentang konsep kerja dari Motor Sinkron yang merupakan tugas dari Mata Kuliah Teknik Tenaga Listrik.
1.3. Manfaat Penulisan
Manfaat penulisan makalah ini adalah :
1. Menambah pengetahuan dan wawasan bagi penulis tentang motor sinkron tiga phasa
BAB 2 DASAR TEORI 2.1 Pengertian Dasar Synchronous Motor
Synchronous motor adalah motor AC tiga-fasa yang dijalankan pada kecepatan sinkron, tanpa slip. Synchronous motor adalah motor AC tiga-fasa yang dijalankan pada kecepatan sinkron, tanpa slip.
Motor sinkron merupakan motor arus bolak-balik ( AC ) yang penggunaannya tidak seluas motor asinkron. Secara umum penggunaan motor sinkron difungsikan sebagai generator, akan tetapi motor sinkron tetap digunakan oleh industri yang membutuhkan ketelitian putaran dan putaran konstan.
Sebuah motor sinkron selalu beroperasi pada kecepatan konstan, pada kondisi tidak berbeban. Tetapi apabila motor diberi beban, maka motor akan selalu akan berusaha untuk tetap pada putaran konstan. Dan motor akan melepaskan kondisi sinkronnya apabila beban yang ditanggung terlalau besar ( Torsi Pull-out ).
Motor sinkron memeiliki kekurangan didalam melakukan start dengan sendirinya. Karena tidak memiliki torsi start awal, oleh karena itu motor sinkron memerlukan beberapa alat bantu untuk membantu didalam start awal sehingga masuk didalam kondisi sinkron.
Pada sebuah induksi motor, rotor harus memiliki slip. Kecepatan rotor harus kurang atau terlambat dari perputaran fluks stator supaya arus diinduksikan ke rotor. Jika induksi rotor motor tersebut itu bertujuan untuk mencapai kecepatan sinkron, maka tidak ada garis gaya yang memotong melalui rotor, sehingga tidak ada arus yang akan diinduksikan ke rotor dan tidak ada torsi yang akan dikembangkan.
Synchronous motor memiliki karakteristik sebagai berikut:
• Sebuah stator tiga fasa sama dengan motor induksi. Stator yang memiliki tegangan menengah sering digunakan.
• Sebuah rotor yang bersinggungan (bidang yang berputar) yang memiliki jumlah kutub yang sama sebagai statornya, dan dipasok oleh sumber eksternal arus DC. Tipe brush dan brushless exciters digunakan untuk memasok medan arus DC ke rotor. Arus pada rotor membentuk suatu
hubungan kutub magnetik Utara-Selatan pada kutub-kutub rotor, yang memungkinkan rotor untuk “mengunci” dengan fluks stator yang berputar. • Dimulai sebagai sebuah motor induksi. Rotor synchronous motor juga
mempunyai sebuah squirrel-cage winding yang dikenal sebagai Amortisseurwinding, yang berfungsi menghasilkan torsi untuk menyalakan motor.
• Synchronous motor akan dijalankan pada kecepatan sinkron sesuai dengan rumus:
Synchronous RPM =
Contoh: kecepatan dari suatu synchronous motor yang memiliki 24 kutub dan bekerja pada frekuensi 60Hz adalah:
120 x 60 / 24 = 7200 / 24 = 300 RPM
2.1.1 Kontruksi Motor Sinkron
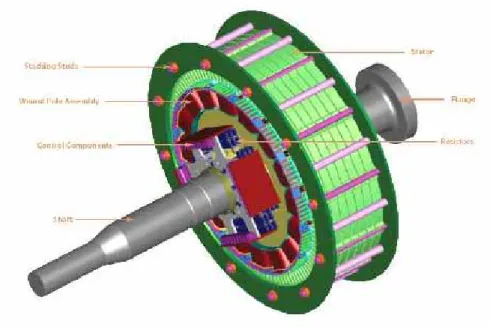
Motor sinkron juga memeilki dua bagian penting yaitu bagian stator yang meruapakan bagain komponen diam, dan bagian rotor yang berfungsi sebagai komponen berputar, stator terdiri dari inti besi dari bahan ferromagnet yang dibeliti dengan lilitan 3 fasa, lilitan 3 fasa ini sama dengan lilitan 3 fasa pada rotor induksi.
Gambar 2.1 Kontruksi Motor Sinkron
Sumber : Tecowestinghouse, engine-type syncronous motor, 27 february 2007. < http://www.tecowestinghouse.com/PDF/Syncronous.pdf>
120 x Frekuensi Banyak Kutub
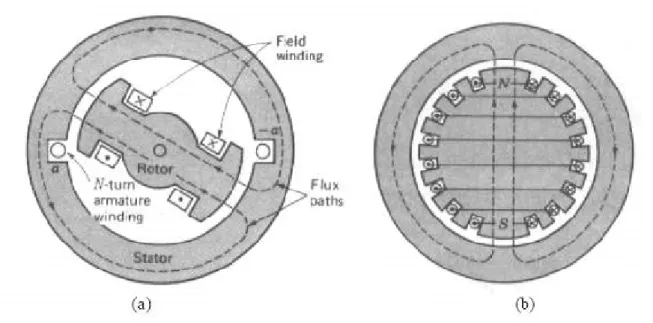
Gambar 2.2 Rotor (a) Salient (b) Non-Salient/Cylindrical Structures
Rotor pada motor ada dua type yaitu salient pole ( menonjol ) dan non salient pole ( tidak menonjol ) dan terdiri dari kutub menonjol yang juga dibeliti dengan lilitan untuk eksitasi DC dari luar. Kumparan dari lilitan excitasi ini dihubungkan dengan slip ring untuk dihubungkan dengan sumber eksitasi DC dari luar.
Motor sinkron selalu memerlukan arus eksitasi agar selalau dapat berjalan dengan sinkron, arus eksitasi dapat digolongkan menjadi 3 jenis diantaranya :
• Eksitasi Dynamic, merupakan jenis eksitasi yang konvensional. Dimana arus eksitasi diperoleh dari sebuah generator DC yang dihubungkan ke Rotor motor sinkron. Jenis eksitasi ini memiliki kekurangan, yaitu bahwa generator DC merupakan beban tambahan bagi motor. Kemudian sikat arang sebagai penghubung eksitasi menekan slip ring yang menimbulkan rugi-rugi.
Gambar 2.3 Eksitasi Dynamic
• Eksitasi Statis, merupakan perkembangan dari eksitasi dinamis. Dimana alat ini menggunakan penyearah elektronik ( Rectifier ), penyearah ini memerlukan sumber teganagn input AC yang diambil dari sumber tegangan jala-jala. Karena exciter yang digunakan tidak berputar seperti pada gambar eksitasi konvensional maka eksitasi dapat dikatakan statis.
Gambar 2.4 Eksitasi Statis
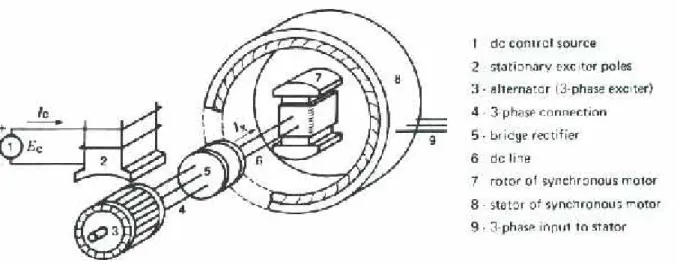
• Eksitasi Brusless, pada prinsipnya brusless ini menggunakan generator AC kecil sebagai ekciter. Pertama, arus DC diberikan pada stator, kemudian rotor pada exciter akan menghasilkan arus AC yang kemudian diserahkan oleh rectifier yang juga ikut berputar pada poros rotor motor sinkron.
Gambar 2.5 Eksitasi Brusless
Motor sinkron yang modern umumnya tidak menggunakan sikat untuk eksitasi luar tetapi eksitasi diambil dari sebuah penyearah yang ikut berputar dan sebuah generator AC yang kecil yang dihubungkan langsung pada poros dari motor sinkron tersebut. Prinsip ini sama dengan yang digunakan pada generator modern yang menggunakan sistem eksitasi sendiri ( Brusless excitation ). Kontruksi untuk motor sinkron tanpa sikat ( Brusless excitation ) dapat dilihat pada gambar 2.5
Rotor dan stator pada motor sinkron selalu mempunyai jumlah kutub yang sama dan seperti pada motor induksi maka jumlah dari kutub ini menentukan kecepatan dari motor sinkron yang hubungannya dapat dirumuskan dengan :
Dimana :
Ns = Kecepatan Motor ( r/min) F = frekuensi sumber
P = jumlah kutub
2.1.2 Karakteristik Motor Sinkron
Terdapat beberapa sifat penting dari motor sinkron diantaranya adalah :
1. Motor sinkron dapat bekerja pada power factor yang berbeda-beda baik power factor terlambat ( lagging ) atau power factor mendahului ( leading ) bila arus eksitasi dirubah.
2. Motor sinkron tidak dapat start dengan sendirinya. Untuk start motor sinkron ini memerlukan bantuan peralatan tambahan yang dapat membantu berputar hingga mencapai kecepatan sinkron atau mendekati kecepatan sinkron hingga motor dapat bekerja normal.
2.2 Prinsip Kerja Motor Sinkron
Motor sinkron serupa dengan motor induksi pada mana keduanya mempunyai belitan stator yang menghasilkan medan putar. Tidak seperti motor induksi, motor sinkron dieksitasi oleh sebuah sumber tegangan dc di luar mesin dan karenanya membutuhkan slip ring dan sikat (brush) untuk memberikan arus kepada rotor. Pada motor sinkron, rotor terkunci dengan medan putar dan berputar dengan kecepatan sinkron. Jika motor sinkron dibebani ke titik dimana rotor ditarik keluar dari keserempakannya dengan medan putar, maka tidak ada torque yang dihasilkan, dan motor akan berhenti. Motor sinkron bukanlah self-starting motor karena torque hanya akan muncul ketika motor bekerja pada kecepatan sinkron; karenanya motor memerlukan peralatan untuk membawanya kepada kecepatan sinkron.
Motor sinkron menggunakan rotor belitan. Jenis ini mempunyai kumparan yang ditempatkan pada slot rotor. Slip ring dan sikat digunakan untuk mensuplai arus kepada rotor.
• Penyalaan Motor Sinkron
Sebuah motor sinkron dapat dinyalakan oleh sebuah motor dc pada satu sumbu. Ketika motor mencapai kecepatan sinkron, arus AC diberikan kepada belitan stator. Motor dc saat ini berfungsi sebagai generator dc dan memberikan eksitasi medan dc kepada rotor. Beban sekarang boleh diberikan kepada motor sinkron. Motor sinkron seringkali dinyalakan dengan menggunakan belitan sangkar tupai (squirrel-cage) yang dipasang di hadapan kutub rotor. Motor kemudian dinyalakan seperti halnya motor induksi hingga mencapai –95% kecepatan sinkron, saat mana arus searah diberikan, dan motor mencapai sinkronisasi. Torque yang diperlukan untuk menarik motor hingga mencapai sinkronisasi disebut pull-in torque.
Seperti diketahui, rotor motor sinkron terkunci dengan medan putar dan harus terus beroperasi pada kecepatan sinkron untuk semua keadaan beban. Selama kondisi tanpa beban (no-load),
garis tengah kutub medan putar dan kutub medan dc berada dalam satu garis (gambar dibawah bagian a). Seiring dengan pembebanan, ada pergeseran kutub rotor ke belakang, relative terhadap kutub stator (gambar bagian b). Tidak ada perubahan kecepatan. Sudut antara kutub rotor dan stator disebut sudut torque .
Prinsip kerja dari synchronous motor adalah sebagai berikut:
• Amortisseur pada rotor menghasilkan Memulai Torsi dan Mempercepat Torsi untuk mempercepat synchronous motor.
• Ketika kecepatan motor mencapai sekitar 97% dari papan RPM, medan arus DC diterapkan ke rotor untuk menghasilkan torsi tarikan dan rotor akan menarik langkah dan mensinkronisasi dengan medan fluks yang berputar di dalam stator. Motor akan dijalankan pada kecepatan sinkron dan menghasilkan torsi yang sinkron atau Synchronous Torque.
• Setelah sinkronisasi, dorongan torsi tidak dapat ditingkatkan lagi atau motor akan menjadi di luar kendali. Kadang-kadang, jika kelebihan beban sesaat, motor akan slip dan sinkronisasi ulang. Perlindungan saat dorongan harus disediakan, jika tidak motor akan berjalan sebagai sebuah motor induksi arus tinggi dan memungkinkan kerusakan
2.3 Keuntungan dari Motor Sinkron
Biaya awal dari sebuah synchronous motor lebih besar dibandingkan motor induksi AC biasa, karena ada biaya untuk kerusakan rotor dan sinkronisasi sirkuit. Biaya ini biasanya karena faktor-faktor sebagai berikut:
• Pengaturan ketepatan kecepatan membuat synchronous motor sebagai pilihan ideal untuk proses industri tertentu dan sebagai penggerak utama generator.
• Synchronous motor memiliki kecepatan atau karakterisik torsi yang cocok untuk penggerak langsung dari mesin bertenaga kuda yang besar, beban RPM rendah seperti kompresor maju-mundur.
• Synchronous motor beroperasi pada faktor daya yang ditingkatkan, dengan demikian dapat meningkatkan faktor daya sistem secara keseluruhan dan menghilangkan atau mengurangi utilitas faktor daya. Peningkatan faktor daya juga mengurangi dropnya tegangan sistem dan dropnya tegangan pada terminal motor.
BAB 3
KONSTRUKSI SYNCHRONOUS MOTOR 3.1 Karakteristik dan Fitur Synchronous Motor
Antara lain:
• Rotasi dari Synchronous motor dibentuk oleh rangkaian fase dari tiga fasa AC yang diterapkan ke stator motor. Seperti dengan tiga fase motor induksi, rotasi synchronous motor dapat berubah dengan membalik tiap dua stator penunjuk. Polaritas rotor tidak berpengaruh pada rotasi.
• Synchronous motor seringkali langsung digabungkan ke beban dan dapat berbagi sebuah poros bersama dan bantalan dengan beban.
• Synchronous motor yang besar biasanya dimulai sebagai across the line. Kadang-kadang, metode mengurangi tegangan, seperti autotransformer atau bagian yang berliku dapat digunakan.
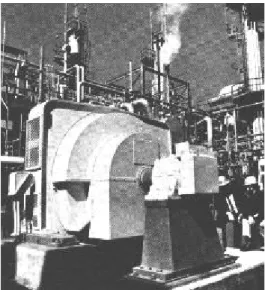
Gambar 3.1. 2000 Horsepower Synchronous Motor in Refinery Service
3.2 Karakteristik dan Fitur Rotor Synchronous Motor
Antara lain:
• Kutub yang ditampilkan di bagian kanan adalah tipe rotor brush yang menggunakan cincin slip untuk aplikasi arus medan DC.
Kutub bidang, yang diberikan energi oleh sumber DC terpisah untuk operasi
Rotor kandang tupai
Cincin korslet. Satu di masing-masing ujung rotor • Tegangan rendah DC digunakan untuk memutar bidang. Tipe tegangan yang tipikal
digunakan adalah 120 VDC dan 250 VDC.
• Polaritas cincin slip tidaklah kritikal dan harus secara berkala dibalik untuk menyamakan pada pemakaian cincin slip. Cincin polaritas negatif akan memperlama pemakaian dibandingkan cincin positif karena faktor elektrolisis.
• Cincin slip biasanya terbuat dari baja untuk umur pemakaian yang lama.
Gambar 3.2. Rotor Synchronous Motor
3.3 Detail dari Amortisseur Winding
Synchronous motor mulai sebagai suatu motor induksi memanfaatkan Amortisseur winding yang merupakan squirrel-cage winding dengan papan rotor short-circuited.
3.4 Sistem tipe Brush Excitation Metode Excitation:
Dua metode yang umumnya digunakan untuk aplikasi dari medan arus DC ke rotor synchronous motor.
• Sistem tipe brush menerapkan output dari suatu generator DC yang terpisah (Exciter) ke cincin slip dari rotor.
• Sistem brushless excitation memanfaatkan suatu integral exciter dan perakitan penyearah yang berputar yang menghilangkan kebutuhan akan brushes dan cincin slip.
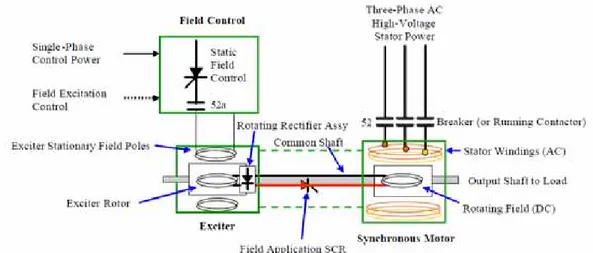
Gambar 3.4. Brush-Type Excitation System
System analysis:
Dalam metode eksitasi DC, arus medan untuk synchronous motor disediakan oleh generator DC terpisah dikenal sebagai exciter. Exciter adalah gabungan mesin DC yang didorong oleh synchronous motor itu sendiri (garis putus-putus) atau oleh suatu motor penggerak yang terpisah. Misalnya Excavators, sering memiliki garis exciter yang terdiri dari sejumlah exciters yang digerakkan oleh motor induksi AC tunggal.
mengatur medan synchronous motor dalam suatu konfigurasi loop tertutup yang telah dirancang untuk mempertahankan kekuatan medan yang memadai untuk berbagai beban atau untuk mempertahankan faktor daya konstan. Medan exciter diberikan energi ketika 52A membantu menutup pemutus utama.
Pada ilustrasi sistem di atas, kekuatan medan exciter mengontrol output DC dari exciter yang diambil oleh brushes pembalik ke brushes cincin slip motor, dan diterapkan melalui cincin slip ke medan perputaran utama dari synchronous motor.
Synchronous motor dimulai sebagai sebuah motor induksi. Ketika rotor mencapai kecepatan mendekati sinkron, medan arus pada motor diterapkan oleh Field Application Relay (Standard Device Designation #56).
3.5 Brushless Exciters
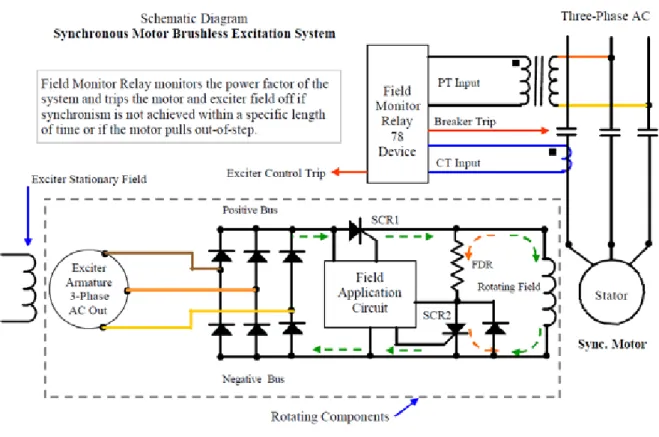
Gambar 3.5. Brushless Excitation System
Gambar 3.6. Brushless Machine Rotor
Metode eksitasi ini menghilangkan kebutuhan akan brushes atau sikat, baik di exciter dan motor.
Ketika motor mulai dinyalakan (Std Device #52), mesin breaker menutup dan menerapkan sistem AC tiga fasa ke gulungan stator motor. Motor dimulai sebagai motor induksi menggunakan Amortisseur winding pada rotor.
Mesin breaker 52a membantu kontak juga menutup dan menerapkan output DC dari solid-state control bidang ke stasioner exciter yang berliku. Sebuah sistem tiga fasa AC diinduksi ke dalam gulungan rotor exciter dan tegangan induksi ini disearahkan oleh penyearah putaran. Ketika rotor mendekati tegangan sinkron, aplikasi SCR (Synchronizing Control Package) dan rectifier DC diterapkan pada synchronous motor. Lihat skema di halaman berikutnya untuk tambahan rincian.
BAB 4
PRINSIP MOTOR SINKRON DAN POWER FACTOR 4.1 Synchronizing Principle
Gambar 4.1. Brushless Machine Rotor
Field Application Circuit dalam suatu sistem eksitasi synchronous motor harus memenuhi tiga fungsi:
• Menyediakan jalur bebas untuk arus yang diinduksi ke wound rotor selama proses awal dan membuka sirkit ini ketika eksitasi diterapkan. Selama proses awal, motor beroperasi sebagai motor induksi dengan torsi yang diproduksi oleh squirrel cage winding. Wound rotor juga dipotong oleh fluks stator berputar dan memiliki tegangan yang terinduksi di dalamnya. Selama fase start-up ini, SCR2 dalam diagram di atas merupakan gerbang “on” oleh Field Application Circuit dan menyediakan jalur bebas untuk arus rotor induksi yang melalui Field Discharge Resistor (FDR) seperti yang ditunjukkan oleh panah merah putus-putus. Frekuensi arus rotor yang diinduksi ini “memberitahu” rangkaian aplikasi bahwa kecepatan yang ada
pada rotor sedang berjalan. Lihat bentuk gelombang pada oscilloscope dibawah.
• Ketika kecepatan rotor mencapai sekitar 97% dari sinkronisasi dan polaritas rotor telah mencapai sinkronisasi, SCR2 akan berubah menjadi “off” dan SCR1 merupakan gerbang “on” memungkinkan koreksi arus DC dari putaran rectifier tiga fasa ke melewati bidang putaran, seperti yang ditunjukkan oleh panah hijau, menghasilkan Synchronizing Torque yang diperlukan untuk rotor untuk menarik dengan putaran fluks stator.
• Field Application Circuit harus menghapus eksitasi segera jika motor di luar kendali.
Gambar 4.2. Waveform of Induced Field Current During Start
4.2 Power Factor
Keuntungan penting dari synchronous motor adalah, faktor daya motor dapat dikontrol dengan mengatur eksitasi putaran bidang DC. Tidak seperti motor induksi AC yang selalu dijalankan pada faktor daya lagging atau tertinggal, synchronous motor dapat dijalankan pada satu kesatuan atau bahkan pada faktor daya terkemuka. Hal ini akan meningkatkan semua faktor daya sistem listrik dan tegangan drop dan juga memperbaiki tegangan drop pada terminal motor ( lihat The Electrician’s Notebook Article Principles of Voltage Regulation untuk suatu penjelasan bagaimana meningkatkan faktor daya sistem juga meningkatkan sistem tegangan drop).
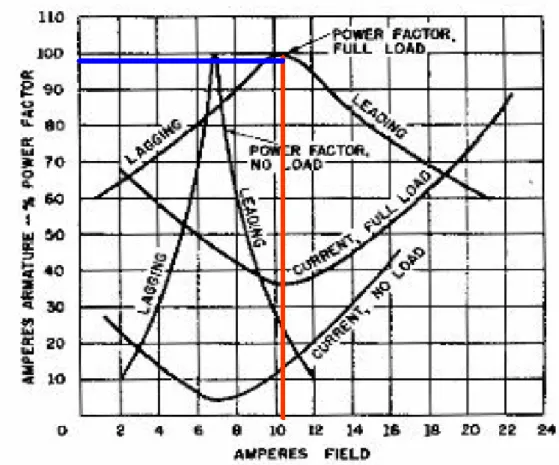
Gambar 4.2. Tipikal Kurva “V” Penjelasan kurva “V”:
• Kurva V synchronous motor di atas menggambarkan efek dari eksitasi (penguat bidang) pada penguat stator dan pada faktor daya sistem. Ada kurva V yang terpisah, untuk tanpa beban dan beban penuh dan kadang-kadang produsen motor menampilkan kurva untuk beban 25%, 50%, dan 75%. Perhatikan bahwa Armature Amperage dan kurva faktor daya V sebenarnya merupakan kebalikan dari V.
• Anggap misalkan kita ingin menentukan bidang eksitasi yang akan menghasilkan kesatuan operasi faktor daya pada motor penuh beban. Rancangan dari titik operasi kesatuan faktor daya (100%) pada Y-Axis ke faktor daya kebalikan maksimum dari kurva V (garis biru). Dari persimpangan ini, rancangan ke bawah (garis merah) dari titik operasi kesatuan faktor daya penuh beban (100%) untuk menentukan yang diperlukan medan arus pada X-Axis. Dalam contoh ini yang diperlukan medan arus DC ditampilkan hanya yang di atas 10 amps saja. Perhatikan pada operasi faktor daya stator beban penuh berada pada nilai minimum.
• Meningkatkan penguat bidang di atas, nilai yang diperlukan untuk kesatuan operasi faktor daya akan menyebabkan mesin untuk berjalan dengan faktor daya utama, sementara melemahnya bidang disebabkan karena faktor daya motor menjadi lagging. Ketika motor berjalan baik dalam kondisi leading atau lagging, penguat stator meningkat di atas nilai kesatuan faktor daya.
BAB 5
KESIMPULAN DAN SARAN 5.1 KESIMPULAN
Dari Makalah diatas, ada beberapa hal yang dapat disimpulkan, yaitu :
1. Motor Sinkron adalah motor AC tiga-fasa yang dijalankan pada kecepatan sinkron, tanpa slip.
2. Motor Sinkron ini memerlukan arus DC untuk pembangkitan daya dan memiliki torsi awal yang rendah
3. Motor sinkron mampu memperbaiki faktor daya sistem sehingga sering digunakan pada sistem yang menggunakan banyak listrik.
5.2 SARAN
Ada beberapa saran yang diharapkan oleh penulis untuk pengembangan makalah ini selanjutnya, yaitu :
1. Penulis mengharapkan pembaca untuk bisa membuat sebuah penelitian tentang sinkronous motor
2. Perlu ada penelitian tentang analisis karakteristik Torsi-Putaran pada motor sinkron tiga phasa yang diperlukan untuk menunjukkan bahwa motor sinkron tiga phasa adalah pilihan yang tepat untuk sistem operasi yang membutuhkan kecepatan yang konstan dengan beban yang berubah-ubah, mungkin bisa dijadikan tugas akhir.
Pertanyaan :
1. Bapak Chairul Hudaya
Jelaskan prinsip kerja Motor Sinkron? Jawab :
PRINSIP KERJA MOTOR SINKRON
Gambar 1. Skematik diagram Synchronous Motor Brushless Excitation System Gambar di atas mengilustrasikan komponen yang terdapat pada motor sinkron 3 fasa, yaitu stator dan rotor, juga di lengkapi Field Monitor relay yang berfungsi untuk memonitor faktor daya pada sistem motor sinkron, juga memutus suplai tegangan jika motor diluar kendali.
Pada saat start-up, ketika breaker menutup maka sumber tegangan 3 fasa akan mengeksitasi stator sehingga menimbulkan medan putar pada rotor, motor beroperasi sebagai motor induksi dengan torsi yang diproduksi oleh squirrel cage winding. Wound rotor juga dipotong oleh fluks stator berputar dan memiliki tegangan yang terinduksi di dalamnya.
Selama fase start-up ini, SCR2 pada diagram diaktifkan oleh Field Application Circuit dan untuk menyediakan jalur bebas untuk arus rotor induksi yang melalui Field Discharge Resistor (FDR) seperti yang ditunjukkan oleh panah merah putus-putus.
Frekuensi arus rotor yang diinduksi ini pada rangkaian megindikasikan bahwa kecepatan yang ada pada rotor sedang berputar. Dapat dilihat bentuk gelombang pada oscilloscope dibawah ini.
Ketika kecepatan rotor mencapai sekitar 97% dari sinkronisasi dan polaritas rotor telah mencapai sinkronisasi, SCR2 tidak aktif (off) dan SCR1 aktif (on) memungkinkan koreksi arus DC dari putaran rectifier tiga fasa ke melewati bidang putaran, seperti yang ditunjukkan oleh panah hijau, menghasilkan Synchronizing Torque yang diperlukan untuk rotor untuk menyamakan putaran dengan putaran fluks stator (Ns=Nr).
Jika motor di luar kendali Field Application Circuit akan menghilangkan eksitasi pada rotor.
DAFTAR PUSTAKA
1. Zuhal. Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta. PT Gramedia Pustka Utama. 1995.
2. http://www.kilowattclassroom.com/Archive/SyncMotors.pdf
3. http://one.indoskripsi.com/judul-skripsi/teknik-elektro/analisis-karakteristik-torsi-putaran-pada-motor-sinkron-tiga-phasa-apli