PROPOSAL SKRIPSI
DESAIN DAN PERMODELAN SISTEM
DISTRIBUSI LISTRIK RUMAH DC
Disusun Oleh: M. RIGADHO SUPRAYOGI
NIM. 0810633012
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS BRAWIJAYA
MALANG 2012
1. JUDUL
DISTRIBUSI LISTRIK RUMAH DC
2. LATAR BELAKANGDewasa ini listrik sudah menjadi suatu kebutuhan pokok dalam kehidupan sehari-hari, akan tetapi kondisi saat ini tidak semua penduduk Indonesia tercukupi karena area yang sukar dijangkau PLN yang bersumber daya AC, seperti area pedalaman. Salah satu alternative untuk menghadapi hal tersebut adalah dengan mengaplikasikan system rumah DC. Rumah DC ini dirancang untuk daya sebuah rumah yang mana tidak memiliki akses terhadap listrik karena memiliki sumber daya sendiri.
Rumah DC adalah salah satu usaha dalam merancang, mensimulasi dan akhirnya membangun satu set beban yang dapat digunakan dengan banyak sumber daya DC. Proyek rumah DC ini secara kasar telah dibagi menjadi 3 bagian. Bagian petama akan berfokus pada arus DC yang termasuk didalamnya desain untuk beberapa kemungkina sumber energy DC. Bagian kedua akan berfokus pada perlindungan system energy yang mana hal itu juga implementasi dari jaringan mikro untuk mengikat beberapa rumah DC untuk membentuk lingkungan DC. Pada bagian terakhir akan menekankan pada desain yang berpusat pada rumah DC yang akan terhubung pada beberapa kesatuan energy.
Pada penulisan tugas akhir akan membahas “Pemodelan dan Desain Rumah DC” dan
melakukan analisis terhadap tegangan rumah DC yang paling efektif dan efisiensi paling tinggi dari rumah dengan 450 watt. Pemodelan dilakukan dengan cara perhitungan dan menggunakan simulator ETAP 7.0 .
3. RUMUSAN MASALAH
Rumusan masalah pada skripsi ini ditekankan pada :
3. Bagaimana permodelan dan karakterisasi yang lengkap dari rumah DC dan bebannya. 3. Bagaimana menentukan sistem distribusi DC dari sumber ke beban yang efisien dan aman. 3. Bagaimana pemilihan beban pada rumah DC yang dapat direkomendasikan.
3. Bagaimana simulasi dari sistem distribusi dari sumber ke bebannya.
4. BATASAN MASALAH
Mengacu pada permasalahan yang ada, maka skripsi ini memiliki batasan masalah sebagai berikut :
4. Tidak membahas sinkronisasi antar sumber untuk mengisi baterai 4. Tidak membahas mengenai inverter.
4. Penelitian ini hanya membahas tentang distribusi daya dari sumber ke beban, penentuan tegangan paling efektif untuk DC house dan menentukan beban yang ideal untuk sistem DC house.
5. TUJUAN
Penulisan skripsi ini bertujuan mendapatkan tegangan paling efektif dan paling efisien untuk sistem rumah DC.
6. SISTEMATIKA PENULISAN HASIL SKRIPSI
Sistematika penulisan yang digunakan dalam penyusunan laporan penelitian ini adalah sebagai berikut.
BAB I PENDAHULUAN
Memuat latar belakang, rumusan masalah, batasan masalah, tujuan, dan sistematika penulisan. BAB II TINJAUAN PUSTAKA
Tinjauan pustaka yang membahas dasar teori pendistribusian rumah DC , komponen instrumen untuk rumah DC, pemilihan beban untuk rumah DC.
BAB III METODOLOGI
Berisi metode penelitian yang akan dilakukan , terdiri dari, studi literatur, analisis pemodelan, simulasi, serta penarikan kesimpulan.
BAB IV PEMBAHASAN
Melakukan analisis pemodelan rumah DC. Serta bagaimana tegangan paling efektif pada rumah DC sehingga didapatkan nilai paling efisien pada rumah DC.
BAB V PENUTUP
Berisi kesimpulan dan saran yang diperoleh dari hasil analisis.
7. TINJAUAN PUSTAKA
Beberapa teori pendukung yang perlu dibahas dalam penulisan ini meliputi : 1. Distribusi DC.
2. Gambaran umum rumah DC.
3. Pemodelan system distribusi rumah DC. 4. Simulator ETAP 7.0
7.1 Distribusi DC
distribusi arus searah (DC) dewasa ini jarang
digunakan, walaupun ada biasanya untuk daerah-daerah tertentu. Penggunaan jaringan DC ini dilakukan dengan jalan menyearahkan terlebih dahulu arus bolak-balik ke arus searah dengan alat penyearah
Converter, sedangkan untuk merubah kembali dari arus bolak-balik ke arus searah digunakan alat Inverter. Walaupun demikian, sistem distribusi DC ini mempunyai keuntungan maupun kerugiannya, yaitu
Keuntungannya
a. Isolasinya lebih sederhana,
b. Daya guna (efisiensi) lebih tinggi, karena faktor dayanya = 1
c. Tidak ada masalah stabilisasi dan perubahan frekuensi untuk penyaluran jarak jauh.
d. Tidak ada masalah arus pengisian (charging current) untuk tegangan tinggi,
e. Dianggap ekonomis bila jarak penyaluran lebih besar dari 1000
km untuk saluran udara, dan lebih besar 50 km untuk saluran bawah tanah.
Kerugiannya
a. Pengubahan arus AC ke DC atau kebalikannya menggunakan peralatan Converter atau Inverter, memerlukan biaya yang tinggi
karena peralatan tersebut harganya mahal.
b. Pada saat beban naik dan jarak penyaluran makin panjang, maka tegangan drop makin tinggi.
Dari kedua sistem ini yang banyak digunakan dewasa ini adalah sistem distribusi arus bolak-balik (AC)
7. Gambaran Umum Rumah DC
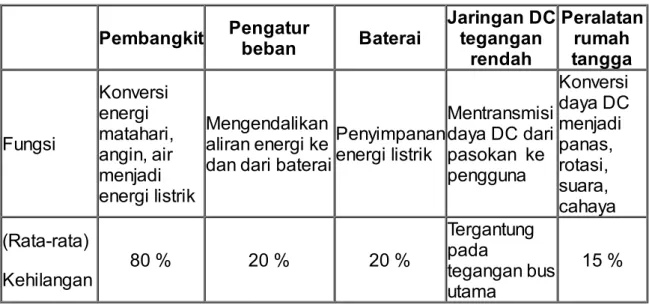
Rumah DC dirancang untuk daya sebuah rumah di pedesaan di mana tidak memiliki akses terhadap listrik. Rumah DC memungkinkan desa yang kurang beruntung untuk meningkatkan gaya hidup mereka. Rumah berdaya DC mencakup berbagai jenis pembangkit, termasuk: foto-voltaic (PV), tenaga angin, tenaga air, dan tenaga manusia seperti yang ditampilkan pada Gambar 2-1. Rumah DC yang otonom ini akan memiliki jaringan listrik mandiri yang disebut juga sistem berdiri sendiri. Komponen utama dengan perkiraan hilangnya energi untuk Rumah DC yang berdiri sendiri tercantum dalam Tabel 2-1.
PV Angin Air Tenaga manusia Pengatur Beban DC-DC Baterai
Lingkup utama proyek ini Sistem utama tegangan
Peralatan DC
Rumah DC dengan konsumsi 250-500 Watt Gambar 2-1. Gambaran Umum Rumah Bertenaga DC
Tabel 2-1: Komponen rumah DC tegangan rendah yang berdiri sendiri
Pembangkit Pengaturbeban Baterai Jaringan DCtegangan rendah Peralatan rumah tangga Fungsi Konversi energi matahari, angin, air menjadi energi listrik Mengendalikan aliran energi ke dan dari baterai
Penyimpanan energi listrik Mentransmisi daya DC dari pasokan ke pengguna Konversi daya DC menjadi panas, rotasi, suara, cahaya (Rata-rata) Kehilangan 80 % 20 % 20 % Tergantung pada tegangan bus utama 15 %
Perkembangan baru di bidang daya elektronik telah membuat yang dampak besar dalam
transmisi daya DC. Keuntungan utama dari transmisi daya DC adalah: pengurangan kehilangan energi, integrasi yang sederhana dari sumber daya energi yang dapat diperbarui seperti PV, pemasangan yang sederhana dengan sistem penyimpanan, dan kerapatan daya yang lebih tinggi. Banyak penulis telah meneliti kelayakan dari penerapan arus searah dalam sistem tegangan rendah dan menengah. Telah terbukti bahwa jika kehilangan pada DC-DC konverter sangat berkurang, kehilangan total sistem mengalami penurunan secara signifikan ketika DC digunakan. Efisiensi dari rumah DC adalah saling bergantung pada efisiensi DC-DC konverter. DC-DC konverter biasanya memiliki efisiensi 77% -95% tergantung pada manufaktur DC-DC konverter [2].
Transfer Daya pada Jaringan DC
Untuk rangkaian DC yang ditunjukkan pada Gambar 2-2 arus, tegangan, dan daya yang hilang tersebut akan dihitung. Hal ini dapat menunjukkan secara matematis bahwa hilangnya daya dan tegangan meningkat seiring dengan meningkatnya daya beban demikian pula dengan
penurunan tegangan sistem. Derivasi dapat dilihat pada Tabel 2-2. Tabel 2-2 menunjukkan bahwa arus meningkat jika daya yang sama ditranspor pada tegangan rendah. Dikarenakan peningkatan arus tersebut, hilangnya tegangan dan daya dalam konduktor akan meningkat, yang menggambarkan bahwa hilangnya tegangan dan hilangnya daya akan jauh lebih besar dalam sistem dengan tegangan yang sangat rendah. Selain masalah kehilangan tegangan, masalah lain dalam jaringan akan timbul dalam rangkaian DC bertegangan rendah yang disebabkan adanya keterbatasan arus hubungan pendek [1].
Gambar 2-2. Jaringan DC
Tabel 2-2. Derivasi Hilangnya Daya pada Rangkaian DC
7. Permodelan system Distribusi DC
Sistem distribusi ini bertujuan untuk memberikan daya dari multi_input converter DC-DC unttuk satu set beban yang akan secara total berjumlah 450 watt. Konverter DC-DC multi input ini mengambil 2 masukan sumber pada tingkat tegangan berbeda dan menghasilkan satu
tegangan keluaran DC yang konstan. Untuk tujuan penulisan tugas akhir ini, akan mencari sistem tegangan paling efektif dan efisiensi tinggi. Secara keseluruhan,diagram blok sederhana dari sistem rumah DC dapat dilihat pada gambar :
Panel surya Tenaga angin
Multi-input DC-DC konverter Rumah DC
Feeder box Penerangan (LED)
TV Pompa air
Gambar 7-3-1 Diagram Blok Sederhana Keseluruhan Dari Proyek Rumah DC
Output dari converter DC-DC akan menuju pada feeder box yang akan member rangkaian terpisah untuk setiap beban. Jarak antara multi-input konverter DC-DCdan feeder box akan disusun berdasarkan implementasi sistem. Jarak ini diminimalkan karena tegangan rendah dan output daya yang tinggi dari konverter DC-Dc akan menimbulkan arus yang relative besar pada umumnya yang selanjutnya menimbuilakn masalah bagi efisiensi sistem distribusi. Daya yang diberikan oleh elemen resistif dapat diturunkan sebagai fungsi dari resistansi R dan aliran arus RMS dengan menggunakan hokum Ohm dan persamaan untuk daya listrik.
P = I2 R
Persamaan 7-3-1 menunjukkan bahwa peningkatan arus akan menimbulkan peningkatan eksponensial dalam daya yang diberikan dalam kawat. Karena hal inilah mengapa arus besar menyebabkan ketidakefisienan sehingga baik arus maupun resistansi kawat dapat diminimalkan dalam pemodelan ini, karena pembangkit tegangan DC umumnya pada tegangan rendah dan arus tinggi, sehingga memerlukan konduktor dengan resistansi minimal.
Resistensi Konduktor
Resistensi sebuah konduktor terutama tergantung pada tiga faktor - panjang, ketebalan, dan jenis bahan. Semua konduktor memiliki nilai terkait resistivitas (ρ) yang dapat digunakan dalam
hubungannya dengan panjang (l) dan luas penampang (A) dari kawat untuk menentukan resistensi kawat. Hubungan ini mengikuti persamaan di bawah ini:
R =
Pengukuran Kawat listrik didasarkan pada luas penampang. Terutama, yang berukuran mils melingkar atau tingkat American Kawat Gauge (AWG). AWG adalah sistem pengukuran standar yang digunakan untuk menggambarkan luas penampang konduktor, dimana semakin besar jumlah menunjukkan luas penampang yang lebih kecil. Sebagai contoh, sebuah konduktor yang berukuran 22 AWG lebih kecil dari Kawat 2 AWG. Satu mil melingkar atau [cmil] setara dengan luas lingkaran dengan diameter 1 mil, dimana 1 mil adalah seribu inci. Kcmil setara dengan 1000 cmils. Kcmil ini hanya digunakan untuk menggambarkan luas penampang dari konduktor yang lebih besar dari kawat AWG 4/0. Ini adalah standar yang digunakan NEC untuk semua konduktor.
Biasanya aluminium dan tembaga digunakan sebagai konduktor. aluminium memiliki
resistivitas 2,82 × 10-8 [Ω · m] dan tembaga memiliki resistivitas 1,68 × 10-8 [Ω · m]. Secara teori, tembaga selalu lebih baik atas konduktor aluminium karena memiliki resistivitas rendah yang
berarti kerugian daya yang lebih rendah. Meskipun demikian, aluminium kadang-kadang digunakan karena tembaga lebih mahal. Hal ini lebih disukai untuk mengurangi biaya secara drastis dalam jalur transmisi skala besar dan jasa distribusi tegangan tinggi. Selain itu, dalam tembaga
pembangkit fotovoltaik selalu digunakan karena tegangan pembangkit rendah dan arus
pembangkit tinggi akan menciptakan ketidakefisienan. NEC pada kenyataannya membutuhkan penggunaan konduktor tembaga pada output daya DC tegangan rendah dari jajaran panel surya.
Ukuran Kawat
Pada sistem rumah DC ini akan mematuhi standar listrik NEC dalam setiap hal. Kondisi yang menentukan diameter kawat adalah :
1. Suhu tertinggi yang dapat ditoleransi oleh konduktor; 2. Penurunan tegangan hingga batas yang diperbolehkan;
3. Impedansi maksimum dimana perlindungan sirkuit pendek masih bekerja.
Kehilangan tegangan seharusnya tidak menyebabkan kerusakan suatu peralatan rumah tangga. Sebuah catatan dari NEC 210-19 FPN No 4 menyatakan bahwa penurunan 5% dari tegangan lebih lanjut pada penerima dalam rangkaian jaringan kabel dapat diterima untuk efisiensi yang normal.
8. METODOLOGI
Metode penelitian yang digunakan dalam rancang bangun pengaturan duty cycle dengan sensor kecepatan rotary dapat dilihat pada diagram flowchart berikut :
Mulai Studi literatur
Perancangan;Analisis Simulasi
Kesimpulan;Saran Selesai
Gambar 12 Kerangka umum metode pengerjaan penelitian
8.1 Studi Literatur
Untuk mendukung penulisan skripsi ini agar didapatkan hasil yang maksimal diperlukan literatur sebagai acuan penulisan. Studi literatur ini digunakan untuk mengetahui dasar teori sehingga mampu menunjang dalam proses perancangan pengaturan duty cycle dengan sensor kecepatan rotary. Studi literatur ini menggunakan sumber yang berasal dari buku, jurnal ilmiah, dan internet. 8.2 Pengumpulan Data
Data yang diperlukan dalam perancangan ini adalah sebagai berikut : 1. Tipe motor yang digunakan.
2. Tipe sensor kecepatan yang terdapat dipasar.
3. Ukuran piringan yang cocok dengan sepeda pada umumnya.
4. Perangkat yang digunakan dalan pengaturan pulse width modulation.
8.3 Perancangan Perangkat
Pengolahan sinyal PWM Mulai
Perhitungan frekuensi on/off sensor kecepatan rotari Putaran piringan sensor rotari
Frekuensi sensor > Frekuensi putaran roda? Motor aktif dengan kecepatan yang variabel
Chopper aktif
Gain aktif,tegangan dirubah dari 5 V menjadi 36 volt 8.3.1 Diagram alir proses kerja sistem perangkat
Tidak
Ya
Perangkat ini dirancang dengan tujuan dapat mengatur besarnya Vout yang nantinya digunakan sebagai sinyal untuk mengatur besarnya torsi dan kecepatan pada motor DC yang
diaplikasikan ke sepeda listrik. Semakin besar Vout, maka kecepatan dan torsi dari motor akan semakin besar, dan pengayuh sepeda akan semakin terbantu dengan semakin besarnya kecepatan dan torsi pada roda sepeda. Besarnya Vout yang dihasilkan oleh sistem berbanding lurus dengan besarnya duty cycle ( D ). Dimana rumus dari Vout adalah Vout=D*Vin. Dengan mengatur besarnya duty cycle, maka Vout juga dapat diatur sesuai keinginan.
Perancangan untuk sistem ini meliputi perancangan sensor kecepatan yang menggunakan sensor kecepatan rotary, Pulse Width Modulation (PWM), serta pemilihan jenis motor yang akan digunakan dalam sistem. Sehingga sistem pengaturan duty cycle yang akan dibuat dapat didapatkan dengan baik serta dapat diaplikasikan langsung untuk sepeda listrik.
8.3.2 Perancangan sensor kecepatan rotari/rotary encoder
Sensor kecepatan rotary yang digunakan adalah berupa suatu sensor yang terdiri dari piringan
aclyric yang memiliki lubang tiap sisinya serta terdapat sumber cahaya berupa LED dan
sensor cahaya berupa phototransistor. Berikut merupakan gambaran umum dari sensor kecepatan rotari.
8.3.2.1 Gambaran umum sensor kecepatan rotari
Prinsip kerja dari sensor ini adalah disaat rangkaian sumber cahaya diberikan VCC sebesar 5 Volt, dan menghasilkan cahaya, cahaya yang masuk pada phototransistor tidak terhalangi. Sehingga akan menghasilkan tegangan sekitar 5 V. Dan begitu juga sebaliknya saat terhalangi maka akan menghasilkan tegangan sekitar 0 V. Siklus dimana photo transistor menangkap cahaya dan tidak menangkap cahaya ini yang akan digunakan sebagai input untu mikrokontroller, yang berikutnya akan digunakan untuk mengatur duty cycle. Berikut adalah gambar rangkaian sensor kecepatan yang akan digunakan.
8.3.2.2 Gambar Rangkaian Sensor Kecepatan
Untuk mengaktifkan inframerah LED dibutuhkan tegangan sebesar 5 volt. Sedangkan sebagai penerima cahaya dari LED tersebut adalah phototransistor. Cara kerja phototransistor tersebut sendiri adalah apabila basis tidak dialiri arus yang cukup, maka transistor cut off. Kondisi cut off disebabkan oleh terdapatnya sesuatu yang memotong antara IR LED dan phototransistor. Pada perancangan ini, benda yang memotong cahaya masuk ke phototransistor adalah berupa piringan
aclyric. Bila tidak ada sesuatu yang memotong antara IR led dan phototransistor, artinya
phototransistor akan mendapat sinar inframerah dari IR LED, maka basis phototransistor akan
teraliri arus. Hal ini menyebabkan arus akan mengalir ke emitter. Kemudian arus akan masuk ke resistor dengan nilai tertentu. Resistor ini berfungsi untuk mengurangi arus yang berlebih dari
phototransistor dan mengaktifkan basis tansistor, emitter. Disini siklus On/Off dari output rangkaian
inilah yang digunakan sebagai sebagai pemberi sinyal masukkan ke mikrokontroller.
8.3.3 Perancangan pengatur lebar pulsa
Keluaran dari sensor kecepatan rotari adalah berupa tegangan pada saat siklus On atau siklus Off adalah berupa tegangan. Dari keluaran tersebut, akan digunakan sebagai masukan dari mikrokontroller. Sinyal berupa tegangan ini akan dirubah menjadi bentuk frekuensi agar dapat mengatur besarnya duty cycle. Disini pengaturan duty cycle dilakukan dengan pengaturan t on dan t off dari sinyal dengan periode tetap. Rumus dari duty cycle itu sendiri adalah :
Pengaturan duty cycle itu sendiri pada perangkat dilakukan oleh mikrokontroller AVR ATMEGA 8. Dimana didalam suatu mikrokontroller terdapat fungsi pengaturan lebar pulsa/ Pulse Width
Modulation (PWM). Besar kecilnya lebar pulsa itu sendiri yang mempengaruhi besarnya Vout.
Untuk proses pembangkitan sinyal PWM pada mikrokontroler AVR ATMEGA 8 adalah sebagai berikut.
Gambar 8.3.3.1 Pengaturan lebar pulsa
Resolusi adalah jumlah variasi perubahan nilai dalam PWM tersebut. Misalkan suatu PWM memiliki resolusi 8 bit berarti PWM ini memiliki variasi perubahan nilai sebanyak 2 pangkat 8 = 256 variasi mulai dari 0 – 255 perubahan nilai. Compare adalah nilai pembanding. Nilai ini
merupakan nilai referensi duty cycle dari PWM tersebut. Nilai compare bervariasi sesuai dengan resolusi dari PWM. Dalam gambar nilai compare ditandai dengan garis warna merah, dimana posisinya diantara dasar segitiga dan ujung segitiga.
Clear digunakan untuk penentuan jenis komparator apakah komparator inverting atau non-inverting. Mikrokontroler akan membandingkan posisi keduanya, misalkan apabila PWM diset
pada kondisi clear down, berarti apabila garis segitiga berada dibawah garis merah (compare) maka PWM akan mengeluarkan logika 0.
Sebaliknya apabila garis segitiga berada diatas garis merah (compare) maka PWM akan
mengeluarkan logika 1. Lebar sempitnya logika 1 ditentukan oleh posisi compare, lebar sempitnya logika 1 itulah yang menjadi nilai keluaran PWM,dan kejadian ini terjadi secara harmonik terus-menerus. Maka dari itu nilai compare inilah yang dijadikan nilai duty cycle PWM. Clear Up adalah kebalikan (invers) dari Clear Down pada keluaran logikanya.
Prescale digunakan untuk menentukan waktu periode dari pada PWM. Nilai prescale bervariasi
yaitu 1, 8, 32, 64, 128, 256, 1024. Misalkan jika prescale diset 64 berarti timer / PWM akan menghitung 1 kali, apabila clock di CPU sudah 64 kali. Perioda dari PWM dapat ditentukan sebagai berikut:
Pengaturan prescale disini digunakan untuk mendapatkan frekuensi dan periode. Perhitungan duty
pemberian besar sinyal referensi output dari suatu PWM sehinggan didapatkan nilai duty cycle yang diinginkan. Duty cycle dari PWM dapat dinyatakan sebagai berikut:
Duty cycle 100% berarti sinyal tegangan pengatur motor dilewatkan seluruhnya. Jika tegangan catu 100V, maka motor akan mendapat tegangan 100V. Pada duty cycle 50%, tegangan pada motor hanya akan diberikan 50% dari total tegangan.
Gambar 8.3.3.2 Perbandingan presentase nilai duty cycle
Untuk pengontrolan tegangan keluaran motor dengan metode PWM dapat dilakukan dengan cara sebagai berikut :
Gambar 8.3.3.3 Pengontrolan tegangan keluaran
Dengan menghitung duty cycle yang diberikan, akan didapat tegangan output yang dihasilkan. Sesuai dengan rumus sebagai berikut :
Average voltage merupakan tegangan output pada motor yang dikontrol oleh sinyal PWM. (a)
adalah nilai duty cycle saat kondisi sinyal “on” dan (b) adalah nilai duty cycle saat kondisi sinyal “off”. V full adalah tegangan maximum pada motor. Dengan menggunakan rumus diatas, maka akan didapatkan tegangan output sesuai dengan sinyal kontrol PWM yang dibangkitkan.
8.3.4 Perancangan driver motor
Rangkaian driver digunakan untuk mengatur motor DC Brushless. Untuk pengaturan kecepatan pada motor menggunakan FET dengan jumlah sesuai kondisi. Dengan tujuan arus yang digunakan motor dapat dibagi ke masing-masing FET yang terdapat pada sistem. Secara sederhana cara kerja FET yaitu mengatur arus yang lewat dari drain ke source dengan mengatur tegangan yang mengalir pada gain. Tegangan yang didapat untuk mencatu gain didapatkan dari keluaran
optocoupler yang berubah-ubah tergantung dari PWM yang dikeluarkan oleh MK sebagai masukan optocoupler. Gambar rangkaian dari driver motor dapat ditunjukkan sebagai berikut :
Gambar 8.3.4 Rangkaian driver motor
Dari rangkaian driver motor inilah yang membatasi tegangan dan arus, sehingga motor mendapatkan masukan sesuai dengan kondisi sinyal yang dikondisikan oleh sensor kecepatan rotari. Sehingga kecepatan motor dapat diatur sesuai dengan sinyal dari sensor kecepatan rotari.
9. Penarikan Kesimpulan
Dari hasil analisis dan pembahasan diambil suatu kesimpulan yang merupakan intisari dari
perancangan ini dan disertakan pula saran dari penulis untuk pengembangan penelitian ke depan yang terkait dengan penelitian ini.
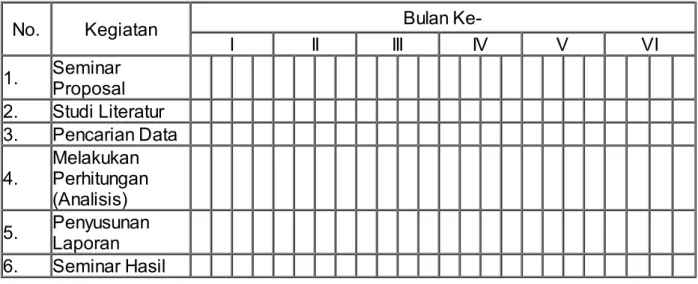
10. Rencana Kegiatan
Kegiatan penyusunan skripsi ini direncanakan akan dikerjakan dalam waktu enam bulan dengan rencana kegiatan setiap bulannya sebagai berikut:
No. Kegiatan Bulan
Ke-I II III IV V VI 1. SeminarProposal 2. Studi Literatur 3. Pencarian Data 4. MelakukanPerhitungan (Analisis) 5. PenyusunanLaporan 6. Seminar Hasil 1. Referensi
Atmel. 2007. 8-bit AVR with 8K Bytes In-System Programmable Flash ATMega 8,
ATMega8L. San Jose: Atmel.
McPherson, George, 1990. Electrical Machines And Transformes . Canada: John Willer & Sons,Inc.
Hughes, Austin. 2006. Electric Motors And Drives (Fundamentals, Types And Applications ). Amsterdam : Elsevier Ltd.
Hanselman, Duane. 1994. Brushless Permanent Magnet Motor Design . United States Of America: Mc Graw-Hill,Inc.
Nugroho, SenoAjie. 2001. PERANCANGAN DAN IMPLEMENTASI DC TO DC CONVERTER SEBAGAI DRIVER MOTOR DC KAPASITAS 200 VOLT 9 AMPERE DENGAN METODE PULSE WIDTH MODULATION. Bandung: IT TELKOM
Ishnatek. 2005. Implementing a Brushless DC Motor Controller on an IGLOO FPGA. Ishnatek. United States Of America.
Rashid, Muhammda H. 1988. Power Electronics Circuits, Devices and Applications. New Jersey: Prentice-Hall International.