58 BAB IV
HASIL PENGUJIAN DAN ANALISA SISTEM
1.1 Hasil Pengujian Sistem
Pengujian dilakukan untuk mengetahui apakah perancangan yang dilakukan telah sesuai dengan yang diharapkan dan didapatkan data yang benar dari hasil pengujian tersebut untuk selanjutnya dianalisa dan didapatkan kesimpulan. Setiap rangkaian utama dari sistem akan diujikan untuk dengan parameter-parameter uji sebagai berikut:
1. Pengujian masukan dari sensor infra merah pada mikrokontroller 2. Pengujian masukan pada GPRS Shield dari mikrokontroller 3. Pengujian waktu pengiriman pesan berdasarkan jarak sensor 4. Pengujian pada sistem timer pada mikrokontroller.
Setelah memasuki tahap pengujian dan mendapatkan data, maka hasil tersebut dapat diolah atau dianalisa untuk mendapatkan sebuah solusi atau kesimpulan. Analisa data yang akan dilakukan adalah berupa perhitungan jarak pengereman kereta api dengan variabel kecepatan dan berat berdasarkan waktu pesan informasi dari sistem pemantauan, untuk mendapatkan sebuah hasil yaitu :
1. Penempatan sensor infra merah yang ideal pada jalur perlintasan untuk mendapatkan pesan dalam waktu efektif.
2. Jarak aman kereta untuk memulai pengereman 3. Jarak aman kereta untuk untuk berhenti total.
59
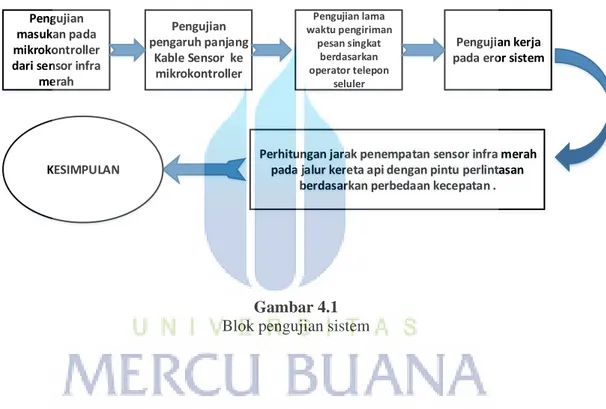
Berikut ini merupakan diagram pengujian blok sistem secara keseluruhan, pengujian dilakukan dengan mengukur ataupun membaca output dari masing-masing blok, dengan mengetahui output setiap blok sehingga mempermudah proses maintenance (perbaikan) karena posisi kerusakan sistem dapat diketahui secara pasti.
Pengujian masukan pada mikrokontroller dari sensor infra
merah Pengujian pengaruh panjang Kable Sensor ke mikrokontroller Pengujian lama waktu pengiriman pesan singkat berdasarkan operator telepon seluler Pengujian kerja pada eror sistem
Perhitungan jarak penempatan sensor infra merah pada jalur kereta api dengan pintu perlintasan
berdasarkan perbedaan kecepatan . KESIMPULAN
Blok uji 1 : pengujian untuk melihat tegangan yang keluar pada sensor infra merah di jalur kereta dengan beberapa kondisi.
Blok uji 2 : Pengujian ini untuk melihat perubahan output pada mikrokontroler menuju dengan variabel perubahan panjang kabel sensor.
Gambar 4.1
60
Blok uji 3 : Pengujian ini untuk mengukur lama waktu proses keseluruhan sistem dari mulai sensor infra merah mendeteksi hingga menerima SMS.
Blok uji 4 : Pengujian ini untuk mengetahui seberapa lama sistem akan dapat terus berjalan sebelum terjadi eror.
Blok uji 5 : Merupakan pengolahan data dari uji blok 1-5 untuk mendapatkan data baru
1.1.1 Hasil Uji Blok 1
Pengujian ini bertujuan untuk melihat nilai input yang masuk dari sensor infra merah ke mikrokontroller. Pengukuran untuk uji coba ini menggunakan multimeter dan melihat perubahan nilai yang masuk ke mikrokontroller sebagai triger sistem pertama.
Pengujian dilakukan dengan mengukur nilai tegangan yang berada pada kedua ujung photodioda dan mengukur tegangan yang masuk mikrokontroller melalui pin-pin masukan analog.
61
Pengujian Tegangan Pada Sensor Infra Merah ke Mikrokontroller
Lama Waktu kecepatan sensor
Waktu Kerja Sistem (Vdc) Jalur kereta 1 Jalur kereta 2 Pintu 1 Pintu 2 0 0,83 2,26 4,18 3,80 1 4,92 4,93 4.96 4,92 2 4,98 4,97 4,97 4,97 Keterangan tabel:
Kondisi 0 : merupakan kondisi normal, dimana tidak ada halangan diantara sinar infra merah.
Kondisi 1 : merupakan kondisi halangan dengan waktu halangan melewati sinar infra merah kurang dari 1 detik .
Kondisi 2 : merupakan kondisi halangan dengan waktu halangan melewati sinar infra merah lebih dari 1 detik.
Dari hasil pengujian didapatkan bahwa sensor infra merah dapat bekerja dengan baik, dimana photodioda bereaksi terhadap sinar infra merah. Terdapat perbedaan nilai tegangan saat kondisi awal, antara photodioda pada jalur kereta 1 dan photo dioda pada jalur kereta 2. Demikian juga nilai
Tabel 4.2
Hasil pengujian tegangan yang masuk ke mikrokontroller dari sensor infra merah
62
tegangan yang keluar pada photodioda pada pintu 1 dan pintu 2. Hal ini kemungkinan disebabkan oleh materi dan pembuatan photodioda itu sendiri dan jarak kerapatan antara infra merah dan photodioda berbeda sehingga mempengaruhi nilai resistansi dan pada akhirnya nilai tegangan yang dapat dilewati.
1.1.2 Hasil uji Blok 2
Blok 2 menguji perubahan nilai input yang masuk ke mikroktroller dengan merubah panjang dari kabel sensor infra merah penghubung antara sensor dengan mikrokontroller. Seperti yang diketahui bahwa pada transmisi tegangan terdapat pengaruh panjang kabel yang akan menentukan nilai akhir dari tegangan yang akan masuk. Semakin panjang kabel yang digunakan, maka akan semakin berkurang nilai tegangan yang ditransmisikan. Hal ini disebabkan oleh rugi-rugi tegangan yang hilang dalam perjalanan
63 .
Pengujian Pengaruh Panjang Kabel Sensor terhadap Masukan ke Mikrokontroller
Panjang kabel Penambahan
Nilai Tegangan yang masuk ke Mikrokontroller (Vdc) Dalam Kondisi Awal Jalur kereta 1 Awal (45 cm) Jalur kereta 2 awal (55cm) Pintu 1 awal (25Cm) Pintu 2 awal (55cm) Awal 0,83 2,26 4,18 3,80 + 50cm 0,80 2, 23 4,14 3,77 + 1m 0,76 2,18 4, 09 3,72 + 2 m 0,70 2,10 3,98 3,66
Dari tabel data diatas maka dapat diambil sebuah kesimpulan dari analisa mengenai rugi-rugi tegangan dalam perjalanan yaitu terdapat pengurangan tegangan jika dilakukan penggatian ataupun penambahan kabel sensor yang akan mentrasmisikan sinyal tegangan ke mikrokontroller.
Tabel 4.2
Hasil pengujian pengaruh panjang kabel sensor terhadap tegangan yang masuk ke mikrokontroller dari sensor infra merah
64 1.1.3 Hasil Uji Blok 3
Pengujian ini berfungsi untuk mengukur waktu proses sistem ini dalam satu periode mulai dari saat kereta api melintas sehingga mengaktifkan sensor infra merah hingga pengiriman SMS. Parameter perbandingan pada pengujian ini adalah penggunaan 2 operator SMS yang berebeda dan juga variable kecepatan kereta mainan. Perbedaan dari waktu yang didapatkan akan diambil operator dengan waktu respon tercepat untuk dijadikan acuan dalam perhitungan jarak aman pengereman kereta api.
Pengujian Waktu Kerja Sistem Berdasarkan Operator SMS No. Pengujian Kecepatan Kereta Api (m/s) Penggunaan Operator SMS HP Telkomsel HP XL sensor Jlr 1(s) sensor Jlr2 (s) sensor Jlr 1 (s) sensor Jlr 2 (s) 1 10 6,3 6,3 7,8 8,1 2 10 6,2 6,4 9,6 9,7 3 10 6,2 6,3 8,5 7,7 4 20 6,1 7,4 8,6 8,6 5 20 6,2 6,5 7,7 8,3 6 20 6,3 6,3 7,3 8,7 7 40 7,4 6,2 8,8 7,9 8 40 6,2 8,9 8,4 9,1 Tabel 4.3
65
Dari tabel diatas didapatkan sebuah data dengan analisa bahwa pengiriman respon tercepat adalah dengan menggunakan operator yang sama antara pengirim dan penerima guna mendapatkan respon tercepat. Perbedaan operator memungkinkan penambahan proses pada handoffer antara masing-masing operator ditambah kemungkinan antrian slot pengiriman , memungkinkan untuk mendapat respon yang lambat.
1.1.4 Hasil Uji Blok 4
Pengujian Blok 4 untuk mengukur ketahanan dari sistem untuk berjalan sampai menemukan eror pada pengujian lintasannya. Disediakan 10 lap pengujian untuk masing-masing jalur lintasan sensor. Pengujian ini dilakukan dengan melihat sistem untuk bekerja dengan memberikan kondisi pada pintu perlintasan terdapat halangan, sehingga kerja sistem dapat terpantau lengkap dan ketahanan dari program yang terdapat pada mikrokontroller dapat teruji. Pengujian dimulai dari memasuki sensor jalur kereta 1 hingga 10 kali pada setiap pintu perlintasan. Pengujian dikatakan berhasil apabila dalam 1 lap itu Led indikator menyala, dan SMS diterima.
66
Dari hasil pengujian blok 4 didapatkan kesimpulan bahwa
pengujian sistem berhasil dilakukan dan sistem bekerja tanpa gagal selama 10 kali putaran. Hal tersebut memungkinkan karena pengaturan waktu delay dan waktu perhitungan sensor infra merah pada program diubah untuk dipercepat perputarannya dan kecepatan kereta api disesuaikan. Pengaturan ini dilakukan dikarenakan lintasan yang pendek, sehingga dengan kecepatan kereta yang sekitar 10m/s akan mampu merusak waktu perhitungan sensor yang terdapat dalam program mikrokontroller.
Pengujian Ketahanan Sistem saat bekerja
Lap / putaran (1 meter)
Hasil kerja Jalur kereta 1 Jalur
kereta 2 Uji 1 Berhasil Berhasil Uji 2 Berhasil Berhasil Uji 3 Berhasil Berhasil Uji 4 Berhasil Berhasil Uji 5 Berhasil Berhasil Uji 6 Berhasil Berhasil Uji 7 Berhasil Berhasil Uji 8 Berhasil Berhasil Uji 9 Berhasil Berhasil Uji 10 Berhasil Berhasil
Tabel 4.4
67
1.2 Analisa Data Perhitungan Jarak Pengereman Efektif Kereta Api
Analisa ini bersama dengan perhitungan jarak pengereman efektif pada kereta api. Berdasarkan waktu pengiriman SMS yang didapat dari pengujian sebelumnya, maka diperlukan perhitungan berapa jarak pengereman efektif kereta dalam kondisi sebenarnya. Pengaturan untuk waktu respon inframerah mungkin diperlukan pada mikrokontroller jika akan diujicobakan pada sistem nyata. Namun untuk saat ini diperlukan sebuah teori berapa jarak effektif yang didapatkan seorang masinis untuk merespon dari SMS informasi yang diterima.
Perhitungan dengan menggunakan rumus Minden seperti yang telah di paparkan
pada Bab 2.
𝐿 =
3,85 . 𝑉2 6,1 . 𝜓 .( 1+𝜆𝑇10)± 𝑖𝑟
Dimana kondisi permukaan dapat diasumsikan rata seperti yang banyak terdapat pada jalur kereta di daerah Jabodetabek dan daerah pada Pulau Jawa yang tidak terlalu berbukit. Variabel yang akan ditentukan dan diujikan adalah kecepatan 3 kecepatan , yaitu :
a. Kecepatan rendah yang diwakili dengan nilai 40Km/Jam b. Kecepatan sedang yang diwakili dengan nilai 60Km/Jam c. Kecepatan tinggi yang diwakili dengan nilai 90 Km/Jam
Variabel kecepatan ini ditentukan berdasarkan kecepatan standar kereta api pada area JABODETABEK. Sementara untuk koefisien tetap lain yang ditentukan adalah kereta yang akan diujikan kereta penumpang dengan jumlah gerbong sebanyak 10 buah yang masing-masing memiliki berat 40 ton, dengan asumsi
68
berat tersebut sudah termasuk berat penumpang, berat lokomotif adalah 84 ton. Koefisien prosentase pengereman λ = 85% saat kereta penuh. Kondisi
pengereman adalah lokomotif tidak ikut mengerem, dimaksudkan adalah lokomotif mengurangi kecepatan ketika menerima SMS informasi pintu
perlintasan masuk. Dengan kondisi tersebut maka akan didapatkan perhitungan sebagai berikut :
Diketahui :
Berat Kereta Api (GT) = ( 10 x 40) + 84 ) = 484 ton.
Berat Pengereman 𝐵 = 𝜆 . 𝐺 𝑝𝑒𝑟 𝑘𝑒𝑟𝑒𝑡𝑎 atau B = 85% x 40 = 34 ton Berat Pengereman untuk 10 Gerbong (BT) = 34 x 10 = 340 ton
Maka (λT) = BT / GT x 100% atau λT = (340 484)⁄ x 100% = 70,24%
A. Jarak pengereman saat kereta berkecepatan rendah 40Km/jam Maka Jarak Pengereman (L)
𝐿
40=
3,85 . 𝑉2 6,1 . 𝜓 .( 1+𝜆𝑇10)± 𝑖𝑟𝐿
40=
3,85 . 40
26,1 . 0,84 . ( 1 +
1,05 . 70,24
10
) ± 0
L
40=
6160 6,1.0,84.(8,3752)±069
L
40=
6160 6,1.0,84.(8,3752)±0=
6160 42,914=143,542 ≈144 m
Sehingga dapat dikatakan bahwa menurut rumus minden bahwa jarak yang diperlukan untuk pengereman kereta api pada kecepatan 40Km/jam adalah 144 m.
B. Jarak pengereman saat kereta berkecepatan rendah 60Km/jam Maka Diketahui :
Berat Kereta Api (GT) = ( 10 x 40) + 84 ) = 484 ton.
Berat Pengereman 𝐵 = 𝜆 . 𝐺 𝑝𝑒𝑟 𝑘𝑒𝑟𝑒𝑡𝑎 atau B = 85% x 40 = 34 ton Berat Pengereman untuk 10 Gerbong (BT) = 34 x 10 = 340 ton
Maka (λT) = BT / GT x 100% atau λT = (340 484)⁄ x 100% = 70,24%
Maka Jarak Pengereman (L)60
𝐿
60=
3,85 . 602 6,1 . 0,84 .( 1+1,05 .70,2410 )± 0𝐿
60=
13860 6,1.0,84.(8,3752)±0L
60=
13860 6,1.0,84.(8,3752)±0=
13860 42,914=
322,971 ≈323 m
70
Sehingga dapat dikatakan bahwa menurut rumus minden bahwa jarak yang diperlukan untuk pengereman kereta api pada kecepatan 60Km/jam adalah 323 m.
C. Jarak pengereman saat kereta berkecepatan rendah 90Km/jam Maka Jarak Pengereman (L)
𝐿 =
3,85 . 9026,1 . 0,84 .( 1+1,05 .70,2410 )± 0
L =
6,1.0,84.(8,3752)±031185L=
6,1.0,84.(8,3752)±031185=
42,91431185=726,685 ≈727 m
Sehingga dapat dikatakan bahwa menurut rumus minden bahwa jarak yang diperlukan untuk pengereman kereta api pada kecepatan 90Km/jam adalah 727m.
Dari perhitungan diatas, penulis memberikan skema penempatan sensor Infra merah dengan asumsi bahwa kereta api diharuskan berhenti 100 meter sebelum perlintasan jika terjadi sinyal bahaya. Kecepatan rata-rata untuk kereta communter line yang beroperasi di Jabodetabek adalah 40Km/jam dan kecepatan tertinggi adalah 90Km/jam. Untuk penempatan sensor ini, diambil kecepatan menengah yaitu 60km/jam. Jika pada saat akan melintas kecepatan
71
kereta melebihi 60km/jam , dapat diletakan sinyal atau semboyan agar kereta menurunkan kecepatan hingga batas tersebut.
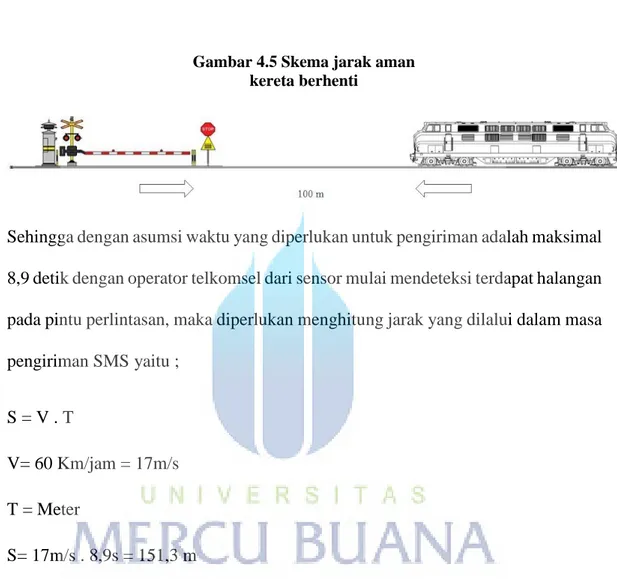
Sehingga dengan asumsi waktu yang diperlukan untuk pengiriman adalah maksimal 8,9 detik dengan operator telkomsel dari sensor mulai mendeteksi terdapat halangan pada pintu perlintasan, maka diperlukan menghitung jarak yang dilalui dalam masa pengiriman SMS yaitu ;
S = V . T
V= 60 Km/jam = 17m/s T = Meter
S= 17m/s . 8,9s = 151,3 m
Dari perhitungan sederhana diatas, didapatkan jarak yang ditempuh kereta api saat berlangsungnya proses kerja sistem sensor dari deteksi kereta api hingga menerima informasi berupa pesan SMS adalah 151,3m.
Gambar 4.5 Skema jarak aman kereta berhenti