Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 1 RANCANG BANGUN ROBOT PENGANTAR SURAT MENGGUNAKAN
MIKROKONTROLER AT89S51
Hariz Bafdal Rudiyanto
Jurusan Teknik Elektro, Universitas Gunadarma Depok – Kelapa Dua
Email: [email protected] ABSTRAKSI
Robot pengantar surat merupakan alat yang berfungsi untuk mengantar surat dari satu ruangan ke ruangan yang lain secara otomatis. Tujuannya adalah untuk menggantikan manusia dalam mengirimkan surat di area perkantoran. Komponen utama dari alat ini terdiri dari pasangan led inframerah dan fotodioda yang digunakan untuk mendeteksi garis pada lintasan, komparator sebagai penyelaras sinyal, mikrokontroler untuk mengontrol seluruh pergerakan robot berdasarkan pembacaan sensor, buzzer sebagai alarm, dan motor DC untuk menggerakan robot. Kesimpulan yang dapat di ambil dari perancangan robot pengantar surat ini adalah robot dapat berfungsi dengan baik sesuai dengan perancangan yaitu mengirimkan surat ke setiap ruangan dan kembali ke tempat semula robot tersebut mengirimkan surat secara otomatis.
Kata Kunci : Sensor, Robot, Mikrokontroler, Otomatis.
PENDAHULUAN
Saat ini teknologi elektronika semakin berkembang pesat, khususnya teknologi yang berhubungan dengan pengontrol otomatis, sehingga manusia selalu mencari proses otomatisasi yang pengoperasiannya dapat digunakan dengan mudah. Salah satu teknologi elektronika otomatisasi yang berkembang saat ini adalah bidang robotika. Robotika bukanlah sesuatu yang baru saat ini, sehingga pengembangan dari robot ini sudah banyak dilakukan dalam segala hal pengaplikasiannya. Dimana hampir di semua kalangan meminati dan juga menggunakannya. Salah satunya adalah robot pengikut garis (line follower robot). Yang pada penulisan akhir ini diaplikasikan sebagai robot pengantar surat pada ruang perkantoran , dimana robot akan bergerak dengan mengikuti lintasan yang dirancang sedemikian rupa sesuai dengan kondisi
ruangan dimana robot akan ditempatkan. Untuk itu judul tugas akhir ini adalah “Rancang Bangun Robot Pengantar Surat Menggunakan Mikrokontroler AT89S51”. Alat ini dikendalikan oleh sebuah program yang dibuat dengan menggunakan bahasa
assembly.
LANDASAN TEORI
Line Follower Robot adalah robot
yang biasa bergerak mengikuti garis panduan. Garis pandu yang digunakan dalam hal ini adalah garis putih yang ditempatkan di atas permukaan berwarna gelap, ataupun sebaliknya, garis hitam yang ditempatkan pada permukaan berwarna putih (cerah). Menurut Priyank Patil dari
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 2
yang dapat berjalan mengikuti suatu lintasan jalur (path).
Untuk pembuatan robot pengantar surat menggunakan mikrokontroler AT89S51 menggunakan beberapa komponen anatra lain:
Dioda Pemancar Cahaya (LED)
LED Inframerah adalah dioda yang dapat memancarkan cahaya dengan panjang gelombang lebih panjang dari cahaya yang dapat dilihat, tetapi lebih pendek dari gelombang radio apabila LED inframerah tersebut dialiri arus. LED digunakan untuk memantulkan cahaya antara cahaya cerah dan gelap ke fotodioda.
Photodioda
Photodioda adalah sebuah dioda semikonduktor yang berfungsi sebagai sensor cahaya. Photodioda memiliki hambatan yang sangat tinggi pada saat dibias mundur. Hambatan ini akan berkurang ketika photodioda disinari cahaya dengan panjang gelombang yang tepat. Sehingga photodioda dapat digunakan sebagai detektor cahaya dengan memonitoring arus yang mengalir melaluinya.
Transistor
Prinsip dari pemakaian transistor adalah transistor yang dioperasikan dalam dua keadaan yaitu keadaan kerja penuh
(saturation) dan keadaan tidak bekerja sama
sekali (cut off). Perubahan keadaan dari satu ke yang lainnya dapat berupa perubahan tegangan dan arus.
Relay
Prinsip kerja pada relay adalah pada saat kumparan dialiri arus, maka akan menimbulkan magnet pada intinya
,
denganadanya magnet pada intinya maka jangkar atau angker akan tertarik oleh inti. Dengan ditariknya jangkar oleh inti maka kontak-kontak relay berubah posisi dan menyebabkan relay akan terhubung.
Operational Amplifier ( Op-Amp )
Op-Amp adalah sebuah amplifier diferensial dasar yang memiliki gain voltase yang besar, impedansi input yang sangat tinggi, dan impedansi output yang rendah. Op-Amp terdiri dari input "inverting" atau (-) dan input "non-inverting" atau (+(-), serta sebuah output. Op-Amp pada perancangan ini digunakan sebagai rangkaian pembanding (komparator) yang berfungsi untuk membandingkan 2 buah tegangan masukan, yaitu V+ atau yang disebut dengan tegangan tak membalik (non inverting) dan V- atau yang disebut dengan tegangan membalik (inverting).
Mikrokontroler AT89S51
Mikrokontroler AT89S51 merupakan salah satu jenis Mikrokontroler CMOS 8 bit yang memiliki performa yang tinggi dengan disipasi daya yang rendah, cocok dengan produk MCS-51. Kemudian memiliki sistem pemograman kembali Flash Memori 4 Kbyte dengan daya tahan 1000 kali write/erase. Pada perancangan alat ini, mikrokontroler ini digunakan sebagai pengontrol robot pada saat pembacaan sensor dan menggerakan motor DC.
IC L298
IC L298 merupakan IC buatan SG5 Thomson Microelectron Inc. yang digunakan untuk mengontrol motor. L298 menggunakan prinsip kerja H-Bridge motor
drive. Didalam L298 terdapat dual full bridge sehingga dapat mengontrol 2 motor
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 3 Motor DC
Motor DC adalah suatu motor yang mengubah energi listrik searah menjadi energi mekanis berupa tenaga penggerak torsi. Motor DC digunakan dimana kontrol kecepatan dan kecepatan torsi diperlukan untuk memenuhi kebutuhan aplikasi. Motor DC dapat dikendalikan oleh mikrokontroller dengan menggunakan metode PWM (Pulse
Width Modulation). Metode Pulse Width Modulation (PWM) adalah sebuah teknik
yang digunakan untuk mengatur kecepatan sebuah motor DC yaitu dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low tertentu, biasanya diskalakan dari 0 hingga 100%.
METODE PENELITIAN
Adapun metode penulisan yang digunakan dalam menyusun dan menganalisa tugas akhir ini adalah:
a. Studi Pustaka
Metode penulisan yang digunakan dalam penulisan ini adalah studi pustaka, dimana penulis menggunakan beberapa sumber tertulis berupa buku-buku pustaka, situs internet, buku-buku referensi, datasheet dan jurnal-jurnal yang berkaitan sebagai bahan referensi dan perbandingan.
b. Perancangan Alat
Penulis menjelaskan tahapan yang berkaitan dengan perancangan alat, sebagai berikut :
Mengumpulkan bahan-bahan yang akan dipergunakan untuk perancangan alat.
Melakukan perencanaan dan perancangan alat robot
pengantar surat menggunakan mikrokontroler AT89S51.
Melakukan kegiatan-kegiatan atau percobaan di laboratorium yang dapat menunjang perencanaan alat. c. Pengujian alat
Peralatan yang telah dibuat kemudian diuji apakah telah sesuai yang telah direncanakan.
PEMBAHASAN DAN HASIL
PENGUJIAN
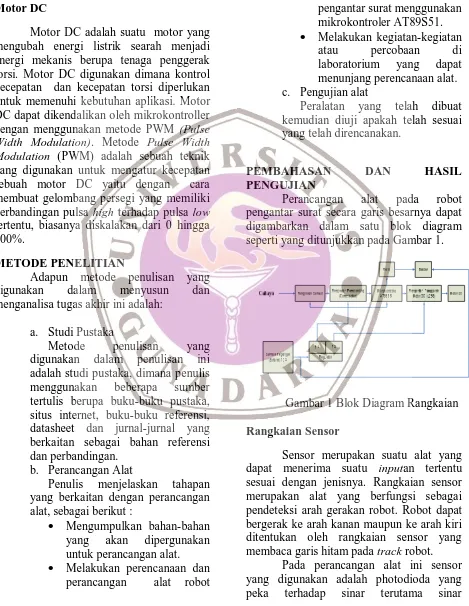
Perancangan alat pada robot pengantar surat secara garis besarnya dapat digambarkan dalam satu blok diagram seperti yang ditunjukkan pada Gambar 1.
Gambar 1 Blok Diagram Rangkaian
Rangkaian Sensor
Sensor merupakan suatu alat yang dapat menerima suatu inputan tertentu sesuai dengan jenisnya. Rangkaian sensor merupakan alat yang berfungsi sebagai pendeteksi arah gerakan robot. Robot dapat bergerak ke arah kanan maupun ke arah kiri ditentukan oleh rangkaian sensor yang membaca garis hitam pada track robot.
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 4
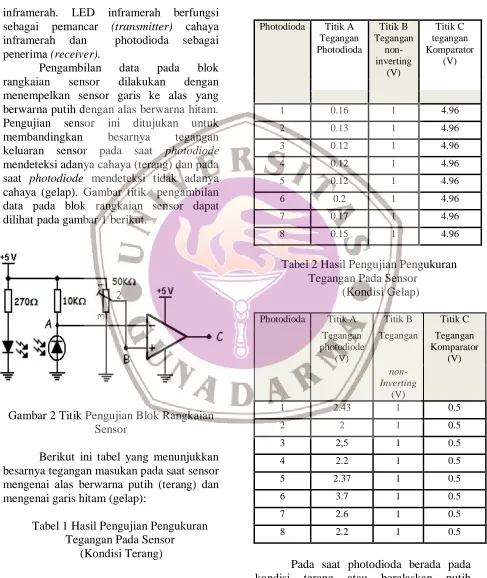
inframerah. LED inframerah berfungsi sebagai pemancar (transmitter) cahaya inframerah dan photodioda sebagai penerima (receiver).
Pengambilan data pada blok rangkaian sensor dilakukan dengan menempelkan sensor garis ke alas yang berwarna putih dengan alas berwarna hitam. Pengujian sensor ini ditujukan untuk membandingkan besarnya tegangan keluaran sensor pada saat photodiode mendeteksi adanya cahaya (terang) dan pada saat photodiode mendeteksi tidak adanya cahaya (gelap). Gambar titik pengambilan data pada blok rangkaian sensor dapat dilihat pada gambar 1 berikut.
Gambar 2 Titik Pengujian Blok Rangkaian Sensor
Berikut ini tabel yang menunjukkan besarnya tegangan masukan pada saat sensor mengenai alas berwarna putih (terang) dan mengenai garis hitam (gelap):
Tabel 1 Hasil Pengujian Pengukuran Tegangan Pada Sensor
(Kondisi Terang)
Photodioda Titik A Tegangan
Tabel 2 Hasil Pengujian Pengukuran Tegangan Pada Sensor
(Kondisi Gelap)
Photodioda Titik A Titik B Titik C
Tegangan photodiode
(V)
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 5
maka kedua tegangan tersebut akan dibandingkan dan tegangan keluaran dari komparator akan mengeluarkan kondisi high ±90% VCC yaitu sebesar 4.96 V atau high.
Pada saat photodioda berada pada kondisi gelap atau beralaskan hitam tegangan pada kaki non-inverting lebih kecil dari pada tegangan kaki inverting maka kedua tegangan tersebut akan dibandingkan dan tegangan keluaran dari komparator akan mengeluarkan kondisi low yaitu sebesar 0,5 Volt.
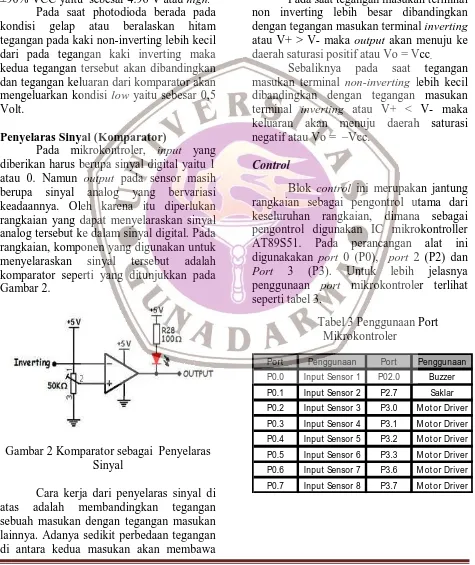
Penyelaras Sinyal (Komparator)
Pada mikrokontroler, input yang diberikan harus berupa sinyal digital yaitu 1 atau 0. Namun output pada sensor masih berupa sinyal analog yang bervariasi keadaannya. Oleh karena itu diperlukan rangkaian yang dapat menyelaraskan sinyal analog tersebut ke dalam sinyal digital. Pada rangkaian, komponen yang digunakan untuk menyelaraskan sinyal tersebut adalah komparator seperti yang ditunjukkan pada Gambar 2.
Gambar 2 Komparator sebagai Penyelaras Sinyal
Cara kerja dari penyelaras sinyal di atas adalah membandingkan tegangan sebuah masukan dengan tegangan masukan lainnya. Adanya sedikit perbedaan tegangan di antara kedua masukan akan membawa
Op-Amp ke dalam daerah saturasi. Arah saturasi keluaran ditentukan oleh polaritas sinyal masukan.
Pada saat tegangan masukan terminal non inverting lebih besar dibandingkan dengan tegangan masukan terminal inverting atau V+ > V- maka output akan menuju ke daerah saturasi positif atau Vo = Vcc.
Sebaliknya pada saat tegangan masukan terminal non-inverting lebih kecil dibandingkan dengan tegangan masukan terminal inverting atau V+ < V- maka keluaran akan menuju daerah saturasi negatif atau Vo = –Vcc.
Control
Blok control ini merupakan jantung rangkaian sebagai pengontrol utama dari keseluruhan rangkaian, dimana sebagai pengontrol digunakan IC mikrokontroller AT89S51. Pada perancangan alat ini digunakakan port 0 (P0), port 2 (P2) dan
Port 3 (P3). Untuk lebih jelasnya penggunaan port mikrokontroler terlihat seperti tabel 3.
Tabel 3Penggunaan Port Mikrokontroler
Port Penggunaan Port Penggunaan
P0.0 Input Sensor 1 P02.0 Buzzer
P0.1 Input Sensor 2 P2.7 Saklar
P0.2 Input Sensor 3 P3.0 M ot or Driver
P0.3 Input Sensor 4 P3.1 M ot or Driver
P0.4 Input Sensor 5 P3.2 M ot or Driver
P0.5 Input Sensor 6 P3.3 M ot or Driver
P0.6 Input Sensor 7 P3.6 M ot or Driver
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 6 Indikator Buzzer
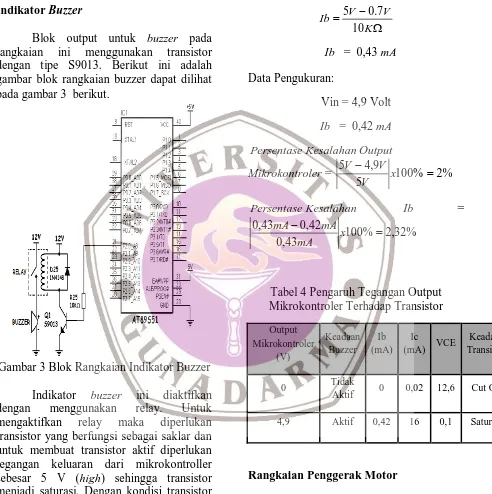
Blok output untuk buzzer pada rangkaian ini menggunakan transistor dengan tipe S9013. Berikut ini adalah gambar blok rangkaian buzzer dapat dilihat pada gambar 3 berikut.
Gambar 3 Blok Rangkaian Indikator Buzzer
Indikator buzzer ini diaktifkan dengan menggunakan relay. Untuk mengaktifkan relay maka diperlukan transistor yang berfungsi sebagai saklar dan untuk membuat transistor aktif diperlukan tegangan keluaran dari mikrokontroller sebesar 5 V (high) sehingga transistor menjadi saturasi. Dengan kondisi transistor menjadi saturasi maka relay akan aktif.
Data Perhitungan:
Ketika kondisi input pada transistor adalah
high, maka :
Persentase Output
Mikrokontroler = 100% 2%
Tabel 4 Pengaruh Tegangan Output Mikrokontroler Terhadap Transistor Output
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 7
motor DC sesuai kecepatan yang diinginkan dengan menggunakan metode PWM (Pulse
Width Modulation). Pin enable A dan B
terletak pada port 3.6 dan 3.7 pada mikrokontroller. Pin-pin enable tersebut digunakan untuk mengendalikan kecepatan motor.
Berikut ini rangkaian IC L298 yang digunakan untuk menggerakan motor DC dapat dilihat pada gambar 4.
Gambar 4 Rangkaian Penggerak Motor DC
Pada rangkaian penggerak motor DC menggunakan teknik PWM untuk mengatur putaran motornya. Sehingga perlu di uji sinyal PWM tersebut. Pengujian sinyal PWM dilakukan dengan mengukur lebar pulsa low dan high dari sinyal PWM yang dikeluarkan dengan menggunakan
oscilloscope. Pengujian ini bertujuan untuk
mengetahui sinyal keluaran yang dihasilkan PWM pada IC L298. Dalam hal ini menguji
duty cycle sinyal PWM yang dipakai untuk
mengukur kecepatan putaran motor roda robot.
Pengambilan data pada oscilloscope diambil pada pin 17 mikrokontroler yang tersambung dengan pin enable IC L298 kaki 12. Berikut ini adalah gambar hasil analisa pengujian sinyal PWM yang digunakan pada motor DC dengan Amplitudo (volt/div) = 1 V dan (time/div) = 0,1 ms. Dimana satu periode gelombang sinyal tersebut sebesar : T = 2,6 x (0,1 . 10-3) sec
T = 2,6 . 10-4 sec
T = 0,26 ms
Pada gambar 5, 6, 7, dan 8 memiliki tingkat tegangan yang sama yaitu 4,8 kotak untuk satu gelombang penuh (peak to peak) pada oscilloscope. Dengan demikian bisa diketahui bahwa tegangan gelombang tersebut sebesar
V = Jumlah kotak (peak to peak) x Volt/div V = 4,8 x 1 Volt/div = 4,8 Vpp.
Gambar 5 PWM Duty cycle 20% Pada Pin
17 Mikrokontroler dengan Ton = 0,04 ms, Toff = 0,22 ms dan Amplitudo 4,8 Vpp.
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 8
Gambar 6 PWM Duty cycle 40% Pada Pin
17 Mikrokontroler dengan Ton = 0,12 ms, Toff = 0,14 ms dan Amplitudo 4,8 Vpp
Gambar 7 PWM duty cycle 60% Pada Pin
17 Mikrokontroler dengan Ton = 0,16 ms, Toff = 0,1ms dan Amplitudo 4,8 Vpp
Gambar 8 PWM Duty cycle 80% Pada Pin
17 Mikrikontroler denga Ton = 0,18 ms, Toff = 0.09 ms dan Amplitudo 4,8 Vpp
Ketika motor DC diberi pulsa maka motor akan bergerak sesuai dengan pulsa yang diberikan dan tampilan pada osiloskop juga berubah sesuai dengan pulsa yang diberikan. Untuk dapat menggerakkan robot sesuai dengan teknik PWM, maka pada saat robot maju dan belok dapat ditentukan sesuai dengan lebar pulsa yang diberikan pada motor DC. Kemudian untuk membuat robot maju atau mundur maka pada motor DC kiri dan kanan robot diberikan pulsa yang sama dan sebaliknya untuk dapat menggerakkan robot belok ke kanan atau kiri maka pada motor DC kiri dan kanan robot diberikan pulsa yang berbeda.
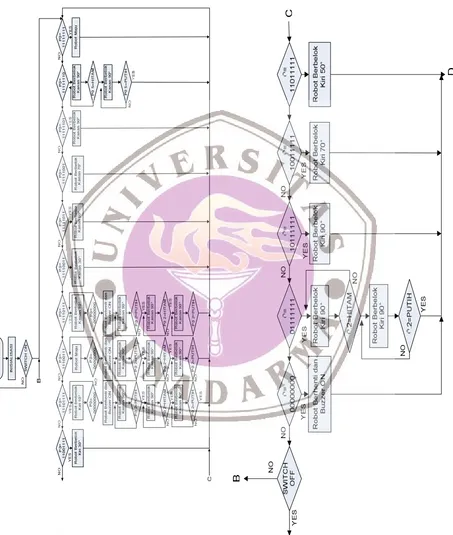
Perancangan Program Dengan Diagram Alir (Flowchart)
Pada pembuatan alat ini dibutuhkan program untuk mengendalikan semua proses kerja dari robot. Untuk memudahkan pembuatan program diperlukan flowchart. Untuk membuat flowchart pada robot yang pertama harus dilakukan adalah mempersiapkan seluruh rangkaian robot pengantar surat, yang terdiri dari rangkaian sensor, rangkaian driver motor dan mikrokontroller dihubungkan sesuai dengan jalur pengawatannya. Kemudian robot dapat ditempatkan di jalur lintasannya. Untuk lebih memaksimalkan kinerja dari robot tersebut, maka terlebih dahulu mengecek seluruh kerangka dan rangkaian pada robot apakah dipasang dengan benar dan akurat. Hal ini dapat mempengaruhi kinerja robot apabila terdapat pemasangan yang kurang sempurna.
Pada gambar 9 dan 10 dapat dilihat
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 9
Gambar 9 Flowchart Program Utama Robot
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 10
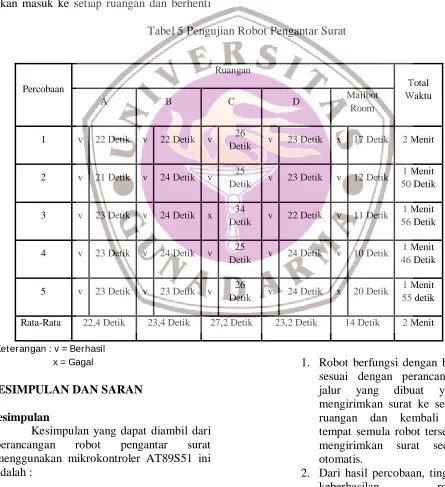
Setelah perancangan software telah dilakukan langkah selanjutnya adalah menguji software tersebut ke jalur lintasan. Pengujian ini dilakukan untuk mengetahui keberhasilan robot dalam mengantarkan surat dari awal penempatan robot hingga kembali lagi ke tempat awal tersebut. Robot akan masuk ke setiap ruangan dan berhenti
di setiap ruangan dengan membunyikan buzzer sebagai alarm masuknya robot. Ruangan yang digunakan pada pengujian ini sebanyak 4 ruangan. Pengujian akan dilakukan sebanyak 5 kali. Sehingga hasil yang didapat akan ditunjukkan ke dalam tabel 5 berikut.
Tabel 5 Pengujian Robot Pengantar Surat
Percobaan
Ruangan
Total Waktu
A B C D Mailbot
Room
1 v 22 Detik v 22 Detik v 26
Detik v 23 Detik x 17 Detik 2 Menit
2 v 21 Detik v 24 Detik v 25
Detik v 23 Detik v 12 Detik
1 Menit 50 Detik
3 v 23 Detik v 24 Detik x 34
Detik v 22 Detik v 11 Detik
1 Menit 56 Detik
4 v 23 Detik v 24 Detik v 25
Detik v 24 Detik v 10 Detik
1 Menit 46 Detik
5 v 23 Detik v 23 Detik v 26
Detik v 24 Detik x 20 Detik
1 Menit 55 detik
Rata-Rata 22,4 Detik 23,4 Detik 27,2 Detik 23,2 Detik 14 Detik 2 Menit
Ket erangan : v = Berhasil x = Gagal
KESIMPULAN DAN SARAN
Kesimpulan
Kesimpulan yang dapat diambil dari perancangan robot pengantar surat menggunakan mikrokontroler AT89S51 ini adalah :
1. Robot berfungsi dengan baik sesuai dengan perancangan jalur yang dibuat yaitu mengirimkan surat ke setiap ruangan dan kembali ke tempat semula robot tersebut mengirimkan surat secara otomatis.
Rancang Bangun Robot Pengant ar Sur at Menggunakan Mikr okont r oler AT89S51 Page 11
ruangan ke ruangan yang lain sebesar 90%. Kegagalan terjadi pada saat robot menemui persimpangan dimana robot melewati persimpangan tersebut. Penyebabnya dikarenakan tingkat kesensitifan sensor masih kurang baik.
3. Jarak yang ditempuh dari tempat awal robot mengirimkan surat dan kembali ke tempat tersebut sebesar 6,8 meter dengan durasi rata-rata waktu selama 2 menit.
Saran
Berikut ini adalah beberapa tambahan yang diperlukan dalam meningkatkan kemampuan robot:
1. Agar keseluruhan alat ini berfungsi secara otomatis tanpa adanya bantuan dari pihak manusia, maka robot dapat dilengkapi mekanik pengambilan dan penerimaan surat secara otomatis dimana surat diletakan.
2. Pada perancangan robot ini, robot berjalan dengan memprioritaskan berbelok ke kiri, maka lebih baik robot dapat bergerak ke segala arah secara fleksibel dengan menambahkan program pada mikrokontroler.
3. Robot masih melewati persimpangan jalur dikarenakan tingkat kesensitifan sensor masih kurang baik, maka sebaiknya sensor harus dikalibrasikan dengan baik saat pembacaan
kondisi terang dan kondisi gelap.
DAFTAR PUSTAKA
Malvino, Albert Paul Ph.D, Prinsip-prinsip
Elektronika, Erlangga, Jakarta,
Agustus 1981.
IC Datasheats, URL : http://www.alldatasheats.com, Agustus 2009.
Malvino, Albert Paul Ph.D, Aproksimasi
Rangkaian Semikonduktor, alih
bahasa, Semiconductor circuit
approximations, Erlangga,
Jakarta, Agustus 1985. Clayton, George and Steve Windert,
Operational Amplifiers, Edisi
Kelima, Erlangga, Jakarta, 2004. Putra, Agfianto Eko, Belajar
Mikrokontroller
AT89C51/52/55 (Teori dan
Aplikasi), Edisi Kedua, Gaya
Media, Yogyakarta, 2004. Suyadhi, Taufiq Dwi Septian, Build Your
Own Line Follower Robot,
ANDI, Yogyakarta, Agustus 2008.
Budiharto, Widodo, Membuat Robot
Cerdas, Elex Media
Komputindo, Jakarta, Juni, 2006.
Budiharto, Widodo, 10 Proyek Robot
Spektakuler, Elex Media