Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-27
ISBN 978-602-73431-0-8
Identifikasi kebutuhan konsumen robot rehabilitasi pasien pasca
stroke dengan menggunakan metode Quality Function Deployment
(QFD)
Hasan Mastrisiswadi
1, Herianto
21Program Pascasarjana Teknik Industri, Jurusan Teknik Mesin dan Industri, Fakultas Teknik, Universitas Gadjah Mada, Yogyakarta
2Jurusan Teknik Mesin dan Industri, Fakultas Teknik, Universitas Gadjah Mada, Yogyakarta E-mail: [email protected]
Intisari
Penyakit stroke merupakan penyebab kematian terbesar kedua di dunia setelah penyakit jantung. Penderita stroke biasanya mengalami kelumpuhan sebagian atau keseluruhan badannya setelah mengalami serangan. Tanpa adanya proses rehabilitasi, keadaan penderita stroke akan semakin memburuk. Namun demikian, proses rehabilitasi hanya bisa dilakukan oleh fisioterapis yang saat ini jumlahnya terbatas dan memerlukan waktu yang lama. Untuk itu perlu dirancang robot rehabilitasi pasien pasca stroke supaya pasien dapat melakukan proses rehabilitasi sendiri di rumah dengan bantuan keluarga. Tujuan dari penelitian ini adalah untuk mengidentifikasi kebutuhan konsumen terhadap robot
rehabilitasi stroke dengan menggunakam metode Quality Function Deployment (QFD) untuk kemudian
mengidentifikasi karakteristik produk apa yang perlu dikembangkan selanjutnya. QFD merupakan metode yang sering digunakan dalam menerjemahkan kebutuhan pelanggan menjadi karakteristik produk.
Dalam penelitian ini didapatkan 16 keinginan pelanggan (Customer voices) yang kemudian diolah
menggunakan QFD dan didapatkan tiga karakteristik produk yang paling penting dikembangkan adalah bentuk pegangan tangan, bentuk pengunci lengan dan material robot.
Kata Kunci: Stroke, Robot rehabilitasi, keinginan pelanggan, Quality Function Deployment (QFD), karakteristik produk .
1. Pendahuluan
Penyakit stroke sebagai penyebab kematian terbesar kedua di dunia setelah penyakit jantung (Donnan, 2008) merupakan salah satu penyakit yang sangat membutuhkan alat rehabilitasi. Penderita stroke biasanya mengalami kelumpuhan, sehingga tidak dapat menggerakkan sebagian atau keseluruhan badannya.
Menurut Hariandja (2013), penderita stroke membutuhkan latihan mandiri di rumah dengan waktu yang fleksibel serta sistem terapi yang mampu memberikan informasi tentang latihan yang dijalankan, menjadi instruktur, memberikan feedback dan penghargaan terhadap keberhasilan latihan, aman, biayanya terjangkau serta ukuran peralatan yang digunakan tidak terlalu besar sehingga dapat digunakan di kamar. Untuk itulah, perlu adanya pengembangan produk untuk alat rehabilitasi pasien pasca stroke sehingga kegiatan rehabilitasi menjadi lebih efektif.
Pengembangan robot rehabilitasi untuk pasien pasca stroke telah dilakukan di Universitas Gadjah Mada sebelumnya. Hanya saja dalam proses mendesain dan memanufaktur robot rehabilitasi tersebut belum dicobakan langsung terhadap pasien, sehingga untuk kebutuhan pasien dan keluarganya belum diobservasi secara maksimal. Dalam penelitian ini, selain mempertimbangkan masukan dari fisioterapis, juga akan mempertimbangkan saran dari pasien dan keluarga pasien yang merupakan target dari robot rehabilitasi pasien pasca stroke ini. Adapun tujuan dari penelitian ini adalah untuk mengidentifikasi kebutuhan konsumen untuk kemudian mengidentifikasi karakteristik produk apa yang perlu dikembangkan selanjutnya dengan menggunakan QFD sampai didapatkan technical importance untuk masing-masing
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-28
ISBN 978-602-73431-0-8
2. Quality Function Deployment (QFD)
Menurut Cohen (1995), QFD (Quality Function Deployment) adalah sebuah metode yang terstruktur yang digunakan dalam proses perencanaan dan pengembangan produk untuk menetapkan spesifikasi kebutuhan dan keinginan konsumen serta mengevaluasi secara sistematis, kapabilitas suatu produk atau jasa dalam memenuhi kebutuhan dan keinginan konsumen.
QFD merupakan sebuah metode perangkat yang sangat handal dan teruji dalam meningkatkan kualitas dalam proses perencanaan, pengembangan atau peningkatan kualitas sebuah produk atau jasa. Dengan terciptanya komunikasi antara pengguna (voice of costumer) dan pembuat (voice of engineer) sebuah produk akan terhindar dari kemungkinan market misses ketika dipasarkan.
Tahap pembentukan House of Quality (HOQ)
Adapun yang menjadi tahapan dalam pembuatan HOQ adalah sebagai berikut: 1. Menentukan voice of customer
Voice of customer atau keinginan pelanggan adalah atribut-atribut yang diinginkan oleh konsumen terhadap suatu produk dan jasa.
2. Membangun planning matrix
Matrix ini menggambarkan persepsi konsumen berdasarkan survei pasar, termasuk di dalamnya kepentingan relatif dan keinginan konsumen maupun performansi perusahaan dalam memenuhi keinginan tersebut. Matrix ini dibuat dengan cara:
a. Memasukkan nilai kepentingan relatif masing-masing kebutuhan konsumen tersebut ke dalam kolom customer importance pada planning matrix. Customer importance
didapatkan dengan cara menghitung rata-rata setiap atribut produk.
b. Memasukkan nilai performansi relatif/tingkat kepuasan konsumen terhadap perusahaan dan pesaingnya ke dalam current satisfaction performance dan competitor satisfaction performance pada planning matrix. Current satisfaction performance dan computer satisfaction performance juga didapatkan dengan menghitung rata-rata.
c. Menetapkan goal yang akan dicapai oleh perusahaan yang nilainya diperoleh dari harapan konsumen atas produk tersebut. Goal ini juga didapatkan dengan menggunakan rata-rata
d. Menghitung improvement ratio, yaitu dengan rumus
(2.1) e. Menentukan sales point, pihak perusahaan juga diminta penilaiannya apakah atribut
tersebut mempengaruhi penjualan perusahaan atau tidak. Selanjutnya penilaian menggunakan kriteria yang dipakai Cohen (1995), yaitu
i. 1 = no sales point
ii. 1,2 = medium sales point
iii. 1,5 = strong sales point
f. Menghitung raw weight dengan rumus:
(2.2) Data yang digunakan adalah data atribut produk yang pertama. Kemudian dihitung
normalized raw weight yang merupakan persentase masing-masing atribut produk tersebut.
3. Menentukan technical responses (voice of company)
Cohen (1995) menggunakan impact symbol untuk mengetahui hubungan tersebut. Adapun simbol-simbol tersebut adalah:
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-29
ISBN 978-602-73431-0-8
Tabel 2.1 Impact symbol
Symbol Arti Nilai
Hubungan sangat kuat 9
Hubungan kuat 3
Hubungan lemah 1
(kosong) Tidak ada hubungan 0
4. Menentukan korelasi antar product features
Setelah product features dihubungkan dengan requirements, langkah selanjutnya adalah menghubungkan antar product features itu sendiri dengan simbol sebagai berikut:
Tabel 2.2 Degrees of technical impact
Symbol Keterangan
√√ Hubungan kuat positif √ Hubungan moderat positif (kosong) Tidak ada hubungan
X Hubungan moderat negatif
Selain itu juga ditentukan pula arah perbaikan dengan simbol sebagai berikut: Tabel 2.3 Simbol perbaikan
Simbol Keterangan
↑ Perlu dimaksimalkan
↓ Perlu diminimalkan
O Target sudah sesuai
5. Menentukan absolute importance dan relative importance
Untuk mendapatkan absolute importance dari masing-masing technical response
menggunakan persamaan:
(2.3) Sedangkan untuk mendapatkan relative importance dengan cara menghitung persentase masing-masing nilai absolute importance untuk memperoleh urutan technical requirements.
3. Metode Penelitian 3.1 Pengambilan data
Penelitian ini diakukan di Kota Semarang dan Yogyakarta, dengan menggunakan responden Fisioterapis dan keluarga pasien sebagai calon konsumen robot rehabilitasi ini. Pengambilan data awal dilakukan dengan metode observasi dan wawancara. Data awal yang telah diperoleh kemudian digunakan untuk membuat butir pertanyaan kuesioner yang kemudian guna mendapatkan data primer penelitian. Adapun kuesioner yang disebarkan menggunakan
Itemized Rating Scale 4 point dengan tujuan meniadakan poin netral/biasa supaya mencegah kecenderungan responden untuk menjawab netral/biasa bagi responden yang ragu-ragu.
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-30
ISBN 978-602-73431-0-8
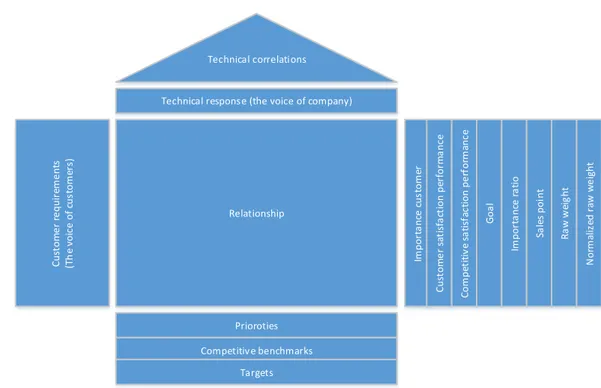
Relationship
Technical response (the voice of company) Technical correlations Prioroties Competitive benchmarks Targets C u st o m e r re q u ir em e n ts (T h e vo ic e o f cu st o m er s) Im p o rt a n ce c u st o m er C u st o m e r sa tis fa ct io n p er fo rm a n ce C o m p et it iv e sa tis fa ct io n p e rf o rm an ce G o a l Im p o rt a n ce r a tio Sa le s p o in t R a w w eig h t N o rm aliz ed r aw w e ig h t
Gambar 2.1 House of Quality (Cohen, 1995)
3.2 Pengolahan data
Pengolahan data dilakukan dengan melakukan uji validitas dan reliabilitas terhadap hasil kuesioner untuk menentukan butir pertanyaan yang benar-benar valid dan reliabel. Setelah valid dan reliabel data tersebut dapat digunakan sebagai masukan dalam membangun HOQ yang terdiri dari planning matrix, technical respons, technical correlations, matrix relationship, dan
prioroties. Hasil dari HOQ ini digunakan untuk menentukan solusi dari technical response, dimana masing-masing solusi tersebut kemudian dikombinasikan dalam concept generation dan dipilih melalui concept selection sehingga didapatkan solusi akhir berupa spesifikasi robot rehabilitasi yang nantinya dikembangkan.
4. Hasil dan Pembahasan
Dari hasil observasi dan wawancara pada 13 responden didapatkan customer voices
terhadap robot rehabilitasi pesien pasca stroke sebagai berikut:
1. Dapat digunakan oleh pasien yang mengalami kesulitan menggenggam 2. Mudah dipasangkan pada tangan pasien
3. Robot terbuat dari material yang aman bagi pasien 4. Lengan tidak ikut bergerak saat menggunakan robot 5. Nyaman dipakai oleh pasien
6. Harga terjangkau
7. Dapat memasukkan program gerakan pada robot dengan mudah 8. Gerakan robot dapat divariasikan sesuai kebutuhan pasien 9. Desain robot yang sederhana (simpel)
10. Robot mudah untuk dipindahkan (portabel) 11. Robot memiliki desain yang kokoh
12. Robot memiliki desain yang menarik
13. Robot dapat digunakan dimana saja (tempat tidur, meja, kursi roda) 14. Robot dapat digunakan untuk tangan kanan maupun kiri
15. Robot memiliki fungsi lain (dapat juga digunakan untuk kaki, siku, jari-jemari) 16. Sistem kontrol robot yang mudah digunakan
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-31
ISBN 978-602-73431-0-8
Gambar 4.1 Observasi dan wawancara pada fisioterapis (kiri) dan pasien (kanan) Dari customer voices tersebut kemudian diolah menjadi butir kuesioner dan disebarkan ke 31 responden di Semarang dan Yogyakarta. Dari hasil kuesioner tersebut kemudian dilakukan uji validitas dan reliabilitas dengan menggunakan software SPSS. Adapun hasil dari uji validitas dapat dilihat pada Tabel 4.1 dan untuk hasil uji reliabilitas dapat dilihat pada tabel 4.2
Tabel 4.1 Hasil uji validitas
R hitung Status R hitung Status 1 Dapat digunakan oleh pasien yang mengalami kesulitan menggenggam 0,764 Valid 0,852 Valid 2 Mudah dipasangkan pada tangan pasien 0,61 Valid 0,594 Valid 3 Robot terbuat dari material yang aman bagi pasien 0,742 Valid 0,718 Valid 4 Lengan tidak ikut bergerak saat menggunakan robot 0,673 Valid 0,734 Valid 5 Nyaman dipakai oleh pasien 0,679 Valid 0,74 Valid
6 Harga terjangkau 0,401 Valid 0,806 Valid
7 Dapat memasukkan program gerakan pada robot dengan mudah 0,778 Valid 0,697 Valid 8 Gerakan robot dapat divariasikan sesuai kebutuhan pasien 0,658 Valid 0,716 Valid 9 Desain robot yang sederhana (simpel) 0,76 Valid 0,569 Valid 10 Robot mudah untuk dipindahkan (portabel) 0,619 Valid 0,566 Valid 11 Robot memiliki desain yang kokoh 0,531 Valid 0,5 Valid 12 Robot memiliki desain yang menarik 0,378 Valid 0,739 Valid 13 Robot dapat digunakan dimana saja (tempat tidur, meja, kursi roda) 0,636 Valid 0,65 Valid 14 Robot dapat digunakan untuk tangan kanan maupun kiri 0,572 Valid 0,754 Valid 15 Robot memiliki fungsi lain (dapat juga digunakan untuk kaki, siku, jari-jemari) 0,727 Valid 0,696 Valid 16 Sistem kontrol robot yang mudah digunakan 0,677 Valid 0,496 Valid
Tingkat kepentingan Tingkat kepuasan Atribut
Butir
Tabel 4.2 Hasil uji reliabilitas
Kuesioner Cronbach's
Alpha
N of Items Status
Tingkat kepentingan 0,901 16 Reliabel sangat bagus
Tingkat kepuasan 0,922 16 Reliabel sangat bagus
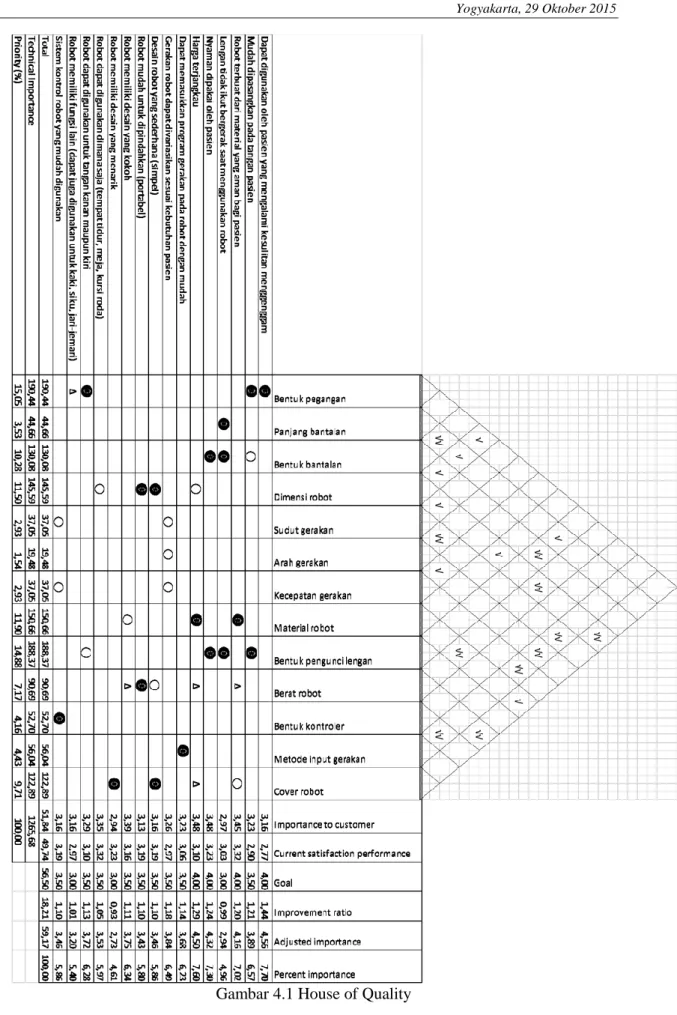
Setelah data terbukti valid dan reliabel, langkah selanjutnya adalah membuat HOQ yang dapat dilihat pada Gambar 4.1. Melalui pengolahan pada planning matrix dalam HOQ, tingkat kepentingan dan improvement ratio kemudian diolah menjadi percent importance yang merupakan tingkat kepentingan setiap customer need secara keseluruhan. Percent importance
tertinggi bagi konsumen adalah robot dapat digunakan oleh pasien yang mengalami kesulitan untuk menggenggam yaitu sebesar 7,70% diikuti dengan atribut harga yang terjangkau yaitu sebesar 7,60%. Adapun yang menjadi percent importance terendah bagi konsumen yaitu robot memiliki desain yang menarik sebesar 4,61%.
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-32
ISBN 978-602-73431-0-8
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-33
ISBN 978-602-73431-0-8
membuat technical response, technical correlations, dan matrix relationship sehingga didapatkan prioritas untuk masing-masing technical response. Melalui HOQ tersebut, didapatkan technical response yang memiliki prioritas pertama adalah bentuk pegangan, kemudian diikuti bentuk pengunci lengan, material robot, dimensi robot, bentuk bantalan, cover
robot, berat robot, metode input gerakan, bentuk kontroler, panjang bantalan, sudut gerakan, kecepatan gerakan dan terakhir arah gerakan. Adapun prioritas dari technical response dapat dilihat pada Tabel 4.3
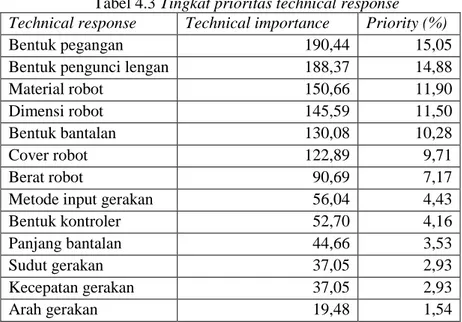
Tabel 4.3 Tingkat prioritas technical response
Technical response Technical importance Priority (%)
Bentuk pegangan 190,44 15,05
Bentuk pengunci lengan 188,37 14,88
Material robot 150,66 11,90
Dimensi robot 145,59 11,50
Bentuk bantalan 130,08 10,28
Cover robot 122,89 9,71
Berat robot 90,69 7,17
Metode input gerakan 56,04 4,43
Bentuk kontroler 52,70 4,16
Panjang bantalan 44,66 3,53
Sudut gerakan 37,05 2,93
Kecepatan gerakan 37,05 2,93
Arah gerakan 19,48 1,54
Bentuk pegangan memang merupakan masalah utama terutama saat observasi langsung. Hal ini karena pasien pasca stroke mengalami kesulitan dalam menggenggam, sehingga proses rehabilitasi kurang efektif. Selain itu bentuk pengunci lengan juga menjadi masalah karena lengan ikut bergerak saat latihan, hal ini tentu saja berpengaruh buruk terhadap efektivitas gerakan. Untuk sudut, kecepatan dan arah gerakan, konsumen tidak terlalu mempedulikan karena sudah dinilai bagus.
Setelah diketahui technical response yang diprioritaskan, langkah selanjutnya adalah dengan menentukan solusi dan mencari kombinasi yang paling sesuai untuk bisa menjadi spesifikasi akhir produk dengan concept generation. Technical response yang menjadi perhatian untuk dikembangkan lebih lanjut adalah Bentuk pegangan, bentuk pengunci lengan, material robot, dimensi robot dan bantalan robot. Adapun solusi untuk menjawab technical response
yang terpilih dapat dilihat pada Tabel 4.4
Tabel 4.4 Solusi dari Technical response
No Technical response Solusi
1 Bentuk pegangan Bentuk setengah bola
Bentuk sarung tangan 2 Bentuk pengunci lengan Bentuk tali pengait
Bentuk Penutup tangan
3 Material robot Alumunium
4 Dimensi robot Dapat diatur dimensinya
Dimensi tetap
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-34
ISBN 978-602-73431-0-8
Bantalan setengah tabung
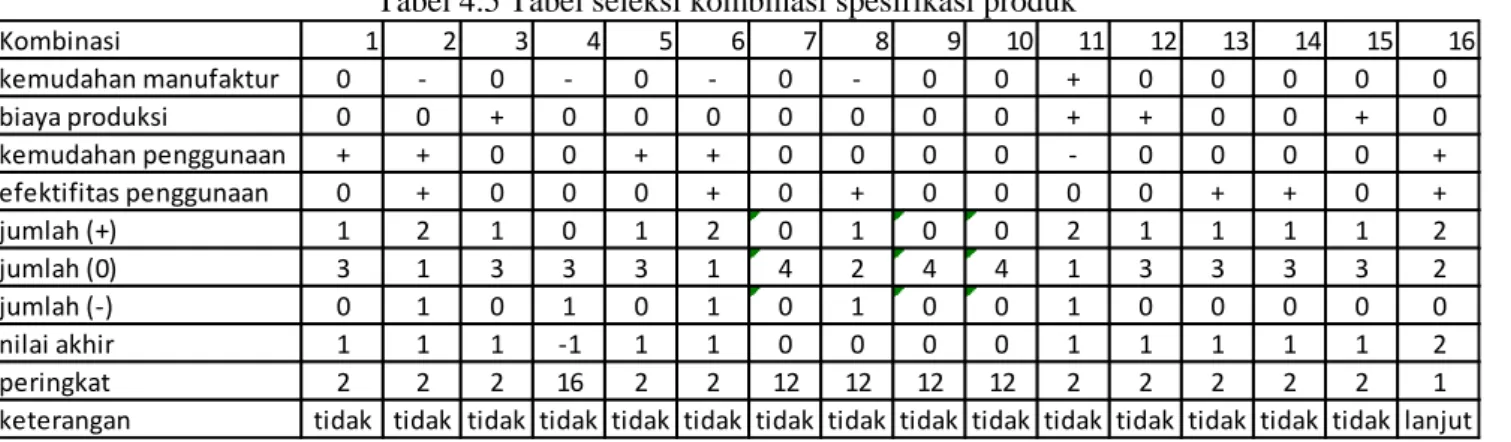
Setelah didapat berbagai macam solusi tersebut, langkah selanjutnya adalah dengan membuat kombinasi dari solusi-solusi yang ada dan menyeleksinya menjadi spesifikasi produk akhir dengan concept selection. Adapun jumlah kombinasi yang terbentuk nantinya adalah 2x2x1x2x2=16 kombinasi. Untuk dapat menyeleksi kombinasi tersebut diperlukan kriteria-kriteria penilaian. Kriteria tersebut adalah kemudahan manufaktur, biaya produksi, kemudahan penggunaan dan efektivitas penggunaan. Penilaian terhadap kombinasi produk tersebut dapat dilihat pada Tabel 4.5
Tabel 4.5 Tabel seleksi kombinasi spesifikasi produk
Kombinasi 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 kemudahan manufaktur 0 - 0 - 0 - 0 - 0 0 + 0 0 0 0 0 biaya produksi 0 0 + 0 0 0 0 0 0 0 + + 0 0 + 0 kemudahan penggunaan + + 0 0 + + 0 0 0 0 - 0 0 0 0 + efektifitas penggunaan 0 + 0 0 0 + 0 + 0 0 0 0 + + 0 + jumlah (+) 1 2 1 0 1 2 0 1 0 0 2 1 1 1 1 2 jumlah (0) 3 1 3 3 3 1 4 2 4 4 1 3 3 3 3 2 jumlah (-) 0 1 0 1 0 1 0 1 0 0 1 0 0 0 0 0 nilai akhir 1 1 1 -1 1 1 0 0 0 0 1 1 1 1 1 2 peringkat 2 2 2 16 2 2 12 12 12 12 2 2 2 2 2 1
keterangan tidak tidak tidak tidak tidak tidak tidak tidak tidak tidak tidak tidak tidak tidak tidak lanjut Pada Tabel 4.5 dapat dilihat bahwa kombinasi terpilih adalah kombinasi ke-16 yaitu
terdiri
dari bentuk pegangan berupa sarung tangan, bentuk pengunci lengan berupa penutup
tangan, dimensi robot tetap, dan bantalan tangan berbentuk setengah tabung, sehingga
hasil spesifikasi akhir robot rehabilitasi adalah sebagai berikut: 1. Bentuk pegangan berupa sarung tangan
2. Bentuk pengunci lengan berupa penutup tangan 3. Dimensi robot tetap
4. Bantalan tangan berbentuk setengah tabung 5. Material alumunium
5. Kesimpulan dan Saran 5.1. Kesimpulan
Dalam penelitian ini didapatkan Adapun kesimpulan yang didapat dari penelitian ini adalah:
1. Telah didapatkan 16 customer voices hasil observasi dan wawancara terhadap 13 Fisioterapi dan keluarga pasien
2. Bentuk pegangan dan pengunci lengan robot merupakan masalah utama saat observasi yang berakibat pada penurunan efektifitas proses rehabilitasi
3. Robot rehabilitasi pasien pasca stroke yang akan dikembangkan memiliki spesifikasi bentuk pegangan berupa sarung tangan, bentuk pengunci lengan berupa penutup lengan, dimensi robot tetap, bantalan tangan berbentuk setengah tabung, dan material robot terbuat dari alumunium
5.2. Saran
Adapun saran untuk penelitian selanjutnya adalah
1. Penelitian selanjutnya tidak hanya dilakukan di Kota Semarang dan Yogyakarta saja tapi juga kota-kota lainnya di Indonesia.
2. Penelitian selanjutnya dapat menggunakan metode lain selain QFD untuk mendapatkan lebih banyak masukan terhadap pengembangan produk selanjutnya.
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-35
ISBN 978-602-73431-0-8 Daftar Pustaka
Bashar, M., F., 2013,
Tugas Akhir:
Desain Dan Manufaktur Robot Rehabilitasi Anggota
Gerak Bawah Untuk Pasien Pasca Stroke.
Jurusan Teknik Mesin dan industri,
Universitas Gadjah Mada, Yogyakarta.
Bossert, J., L., 1991,
Quality Function Deployment
, ASQC Quality Press, United States
of America.
Chaunduri, A., dan Bhattacharyya, 2005,
Lingking Quality Function Deployment with
Conjoint Study for New Product Development Process,
3
rdIEEE International
Conference on Industrial Informtics (INDIN), 396-401.
Cohen L., 1995,
Quality Function Deployment
:
How To Make QFD for You
,
Addison-Wesley Publishing Company, Canada.
Cooper, D., R., dan Schindler, P., S., 2014,
Business Research Methods
, Mc Graw Hill:
New York.
Donnan, G., A., Fisher, M., Macleod, M., and Davis, S., M., 2008,
Stroke
, The larcet:
May 10-May 16, 2008, 9624: ProQuest.
Eversheim, W. (Ed.), 2009,
Innovation Management for Technical Products,
Springer,
Germany.
Franceschini, F., 2002,
Advanced Quality Function Deployment,
St. Lucie Press, United
States of America.
Ghiya, K., K., Bahill, A., T., Chapman, W., L., 1999,
QFD: Validating Robustness
,
Quality Engineering 11(4), 593-611, Marcel Dekker, Inc., Arizona.
Green, P., E., Krieger, A., M., Wind, Y., 2001,
Thirty Years of Conjoint Analysis:
Reflection and Prospects,
INTERFACES 31:3, Part 2, hal. S56-S73.
Hair Jr, J., F., Black, W., C., Babin, B., J., and Anderson, R., E., 2014,
Multivariate
Data Analysis
, 7
thed., Pearson Educated Limited, England.
Hariandja, J., R., O., 2013,
Identifikasi Kebutuhan Akan Sistem Rehabilitasi Berbasis
Teknologi Terjangkau Untuk Penderita Stroke di Indonesia
, Bandung: Lembaga
Penelitian dan Pengabdian kepada Masyarakat Universitas Parahyangan.
Irawati, D., Y., Singgih, M., L., dan Syairuddin, B., 2014,
Integrasi QFD dan Conjoint
Analysis untuk Mengetahui Preferensi Konsumen dengan Memperhitungkan
Willingness to Pay
, Prosiding Seminar Nasional Manajemen Teknologi XXI,
A-30-1-9.
Menteri Kesehatan Republik Indonesia, 2013,
Peraturan Menteri Kesehatan Republik
Indonesia Nomor 86 Tahun 2013 Tentang Peta Jalan Pengembangan Industri
Alat Kesehatan
, Jakarta, Indonesia.
Munandar, A., E., 2013,
Tugas Akhir: Identifikasi dan Pengembangan Alat Bantu
Rehabilitasi Pasien Pasca Stroke
, Jurusan Teknik Mesin dan Industri, Universitas
Gadjah Mada, Yogyakarta.
Pullman, M., E., Moore, W., L., Wardell, D., G., 2002,
A Comparison Of Quality
Function Deployment and Conjoint Analysis in New Product Design
, The Journal
Of Product Innovation Management, 19, 354-364.
Putra, M., M., Y., 2015,
Tugas Akhir: Analisis Perencanaan Strategi Pemasaran Robot
Alat Bantu Rehabilitasi Pasien Pascastroke Berdasar Bobot Kepentingan Faktor
Program Studi Teknik Industri
Jurusan Teknik Mesin dan Industri FT UGM SM-36
ISBN 978-602-73431-0-8