ANALISIS PERBANDINGAN KUALITAS SENSOR JARAK SEBAGAI
SISTEM PENDETEKSI KEHADIRAN MANUSIA PADA WASTAFEL
PORTABLE AUTOMATIC
LAPORAN ALTERNATIF KERJA PRAKTIK PENGABDIAN
MASYARAKAT DI KECAMATAN CIRACAS, JAKARTA TIMUR
Oleh : Anisa Dheayanti
102117029
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PERTAMINA 2020
Scanned by CamScanner
Senin, 11 Januari 2021iii KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan nikmat dan hidayah-Nya, sehingga penulis dapat menyelesaikan penulisan Laporan Akhir Alternatif Kerja Praktik yaitu Pengabdian Masyarakat di Kecamatan Ciracas, Jakarta Timur. Melalui laporan ini penulis berharap dapat bermanfaat bagi pembaca dengan menambah pemahaman terkait penerapan sensor dalam kehidupan sehari-hari.
Penulis mengucapkan terima kasih kepada pihak yang membantu dalam pelaksanaan alternatif kerja praktik ini diantaranya adalah:
1. Dosen Pembimbing Kerja Praktik, yaitu Bapak Herminarto Nugroho, S.T., M.Sc. 2. Pembimbing Mitra, yaitu Bapak Yus Yarden selaku Ketua RW. 01 Kelurahan
Ciracas, Kecamatan Ciracas, Jakarta Timur
Penyusunan Laporan Alternatif Kerja Praktik ini telah disusun dengan sebaik-baiknya, namun Penulis menyadari bahwa dalam penulisan laporan akhir ini masih terdapat banyak kekurangan, sehingga diperlukan kritik dan saran yang membangun dari semua pihak. Atas perhatiannya penulis ucapkan terima kasih.
November 2020
iv DAFTAR ISI
HALAMAN SAMPUL ... i
LEMBAR PERSETUJUAN LAPORAN KERJA PRAKTIK ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... iv
DAFTAR TABEL ... vi
DAFTAR GAMBAR ... vii
DAFTAR LAMPIRAN ... viii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan ... 2
1.2.1 Tujuan Umum ... 2
1.2.2 Tujuan Khusus ... 2
1.3 Tempat dan Waktu Pelaksanaan ... 2
1.4 Pembagian Tugas ... 2
1.5 Manfaat ... 3
1.5.1 Manfaat bagi Instansi/Perusahaan ... 3
1.5.2 Manfaat bagi Perguruan Tinggi ... 3
1.5.3 Manfaat bagi Mahasiswa ... 3
BAB II KEGIATAN KERJA PRAKTIK ... 4
BAB III HASIL KERJA PRAKTIK ... 6
3.1 Desain Objective ... 6
3.2 Desain Perancangan Alat ... 6
3.2.1 Desain Kerangka Wastafel Portable Automatic ... 6
3.2.2 Komponen Pengujian ... 7
3.2.3 Desain Rangkaian ... 9
3.3 Pengujian Alat ... 10
v
3.3.2 Pengujian Sensor PIR ... 12
3.3.3 Pengujian Sensor Infrared Obstacle ... 14
3.3.4 Pengujian Sensor Adjustable Proximity Infrared E18-D80NK ... 15
BAB IV TINJAUAN TEORITIS ... 18
4.1 Sensor Ultrasonik HC-SR04 ... 18
4.2 Sensor Passive Infra Red (PIR) ... 19
4.3 Sensor Infrared Obstacle ... 20
4.4 Sensor Adjustable Proximity Infrared E18-D80NK ... 21
BAB V KESIMPULAN DAN SARAN ... 23
5.1 Kesimpulan ... 23
5.2 Saran ... 23
DAFTAR PUSTAKA ... 24
vi DAFTAR TABEL
Tabel 1. Komponen dalam Proses Pengujian Sensor ... 7
Tabel 2. Koneksi Antar Komponen Pengujian Sensor Ultrasonik HC-SR04 ... 10
Tabel 3. Data Pengujian Alat dengan Sensor Ultrasonik HC-SR04 ... 11
Tabel 4. Koneksi Antar Komponen Pengujian Sensor PIR ... 12
Tabel 5. Data Pengujian Alat dengan Sensor PIR... 13
Tabel 6. Koneksi Antar Komponen Pengujian Sensor Infrared Obstacle ... 14
Tabel 7. Data Pengujian Alat dengan Sensor Infrared Obstacle ... 14
Tabel 8. Koneksi Antar Komponen Pengujian Sensor Adjustable Proximity Infrared E18-D80NK ... 16
Tabel 9. Data Pengujian Alat dengan Sensor Adjustable Proximity Infrared E18-D80NK ... 17
Tabel 10. Karakteristik Sensor Ultrasonik HC-SR04 ... 19
Tabel 11. Karakteristik Sensor PIR... 20
Tabel 12. Karakteristik Sensor Infrared Obstacle ... 21
vii DAFTAR GAMBAR
Gambar 1. Desain Kerangka Wastafel Portable Automatic ... 6
Gambar 2. Desain Poster Wastafel Portable Automatic ... 7
Gambar 3. Desain Rangkaian Pengujian Sensor Ultrasonik HC-SR04 ... 9
Gambar 4. Desain Rangkaian Pengujian Sensor PIR ... 9
Gambar 5. Desain Rangkaian Pengujian Sensor Infrared Obstacle ... 9
Gambar 6. Desain Rangkaian Pengujian Sensor Adjustable Proximity Infrared E18-D80NK ... 10
Gambar 7. Sensor Ultrasonik HC-SR04 ... 18
Gambar 8. Ilustrasi Cara Kerja Sensor Ultrasonik HC-SR04 ... 18
Gambar 9. Sensor PIR ... 19
Gambar 10. Sensor Infrared Obstacle ... 20
Gambar 11. Ilustrasi Cara Kerja Sensor Infrared Obstacle ... 21
viii DAFTAR LAMPIRAN
Lampiran 1. Code Pengujian Sensor Ultrasonik HC-SR04 ... 26
Lampiran 2. Code Pengujian Sensor PIR ... 27
Lampiran 3. Code Pengujian Sensor Infrared Obstacle ... 28
Lampiran 4. Daftar Hadir Kerja Praktik ... 29
Lampiran 5. Surat Keterangan Selesai Kerja Praktik ... 34
Lampiran 6. Lembar Bimbingan Program Studi ... 35
Lampiran 7. Lembar Bimbingan Instansi ... 37
1 BAB I
PENDAHULUAN 1.1Latar Belakang
Dengan adanya perkembangan dunia teknologi dan informasi, maka Indonesia perlu menyiapkan sumber daya manusia yang memiliki kompetensi unggul dalam bidang teknologi dan informasi agar dapat bersaing secara global, terutama pada kondisi di masa pandemi Covid-19 seperti saat ini dengan penyebaran virus yang terjadi begitu cepat karena penularannya melalui percikan (droplet) dari penderita saat bernafas, batuk dan bersin, sehingga perlu adanya pembatasan sosial antar manusia agar penyebaran tidak semakin meluas. Dalam hal ini Program Studi Teknik Elektro, Universitas Pertamina membuka mata kuliah wajib Kerja Praktik dengan kategori Pengabdian Masyarakat.
Kegiatan kerja praktik alternatif (Pengabdian Masyarakat) ini sangat penting dilakukan guna menunjang pengembangan kualitas diri baik softskill maupun hardskill yang sangat berguna untuk menciptakan SDM berkompetensi unggul, selain itu mahasiswa juga dapat mengaplikasikan ilmu yang diperoleh selama perkuliahan berlangsung serta mengasah kreativitas untuk ikut serta dalam penyelesaian masalah yang sering terjadi di lingkungan masyarakat, maka penulis yang bekerjasama dengan CV. Satria Perkasa mengajukan Kecamatan Ciracas, Jakarta Timur sebagai lokasi kegiatan kerja praktik berlangsung karena daerah tersebut merupakan daerah yang memiliki penduduk cukup padat, sehingga sangat rawan terhadap penyebaran virus Covid-19. Dengan adanya kegiatan kerja praktik ini diharapkan mampu memberikan solusi terhadap upaya pencegahan penyebaran virus Covid-19.
Adapun tema kerja praktik yang diajukan sebagai materi kerja praktik di Kecamatan Ciracas, Jakarta Timur, yaitu “Pembuatan Wastafel Portable Automatic sebagai Upaya Pencegahan Penyebaran Virus Covid-19 di Kecamatan Ciracas” dengan berfokus pada perbandingan kualitas sensor sebagai sistem pendeteksi manusia. Hal tersebut sangat penting untuk menentukan sensor yang tepat sesuai dengan karakteristik masing-masing sensor sebagai sistem pendeteksi manusia untuk diterapkan pada wastafel portable automatic.
2 1.2Tujuan
Adapun tujuan dilaksanakannya kerja praktik ini adalah: 1.2.1 Tujuan Umum
- Mahasiswa mampu mengimplementasikan ilmu dan keterampilan di bidang teknik elektro yang telah dipelajari selama perkuliahan berlangsung
- Mahasiswa mampu mengembangkan ilmu, keterampilan, sikap, serta pola pikir - Mahasiswa dapat bekerja secara individu maupun berkelompok dengan baik - Mahasiswa dapat meningkatkan kepedulian sosial dan partisipasi
dalam memberikan kontribusi terhadap lingkungan masyarakat
1.2.2 Tujuan Khusus
- Mahasiswa dapat mempelajari implementasi teknologi di lingkungan masyarakat Kecamatan Ciracas, Jakarta Timur
- Mahasiswa dapat mengembangkan ilmu dan keterampilan secara langsung terkait penerapan perangkat elektronika di Kecamatan Ciracas, Jakarta Timur
- Mahasiswa dapat mempelajari lebih dalam mengenai perbandingan penggunaan beberapa sensor benda sebagai sistem pendeteksi kehadiran manusia pada wastafel portable otomatis di Kecamatan Ciracas, Jakarta Timur
- Mahasiswa dapat memberikan solusi terhadap upaya pencegahan penyebaran virus Covid-19 di Kecamatan Ciracas, Jakarta Timur
1.3Tempat dan Waktu Pelaksanaan
Pelaksanaan kerja praktik ini dilaksanakan pada:
Waktu : 1 s.d. 29 Oktober 2020 dan 30 Oktober s.d. 15 November 2020 Tempat : 1. Masjid Jami Baitul Muslim
2. Kantor RW.01 Ciracas
1.4Pembagian Tugas
Pada pelaksanaan Alternatif Pengganti Kerja Praktik Pengabdian kepada Masyarakat (PkM), penulis mendapatkan tugas dalam melakukan analisis perbandingan sensor sebagai sistem pendeteksi kehadiran manusia pada wastafel portable automatic.
3 1.5Manfaat
1.5.1 Manfaat bagi Instansi/Perusahaan
- Berperan dalam memberikan kesempatan kontribusi mahasiswa dalam pengembangan dan peningkatan kualitas sumber daya manusia
- Sebagai media relasi antara perguruan tinggi dengan pihak instansi/perusahaan
- Memperoleh solusi dalam upaya pencegahan penyebaran virus Covid-19
1.5.2 Manfaat bagi Perguruan Tinggi
- Sebagai bahan evaluasi perguruan tinggi dalam bidang akademik untuk menunjang pengembangan kualitas mutu pendidikan yang sesuai dengan kebutuhan dunia kerja dan lingkungan masyarakat
- Dapat menguji tingkat kemampuan dan pemahaman mahasiswa Teknik Elektro Universitas Pertamina dalam menerapkan teori di bidang teknik elektro
- Sebagai sarana pengenalan perkembangan ilmu pengetahuan dan teknologi di lingkungan masyarakat
- Membangun relasi antara Program Studi Teknik Elektro Universitas Pertamina dengan pihak CV. Satria Perkasa dan Kecamatan Ciracas, Jakarta Timur
1.5.3 Manfaat bagi Mahasiswa
- Mahasiswa dapat menerapkan ilmu selama perkuliahan pada dunia kerja dan lingkungan masyarakat secara langsung
- Mahasiswa dapat mengasah keterampilan berkomunikasi dengan lingkungan masyarakat secara langsung
- Mahasiswa dapat ikut serta dalam menyelesaikan permasalahan yang terjadi di lingkungan masyarakat pada masa pandemi Covid-19
4 BAB II
KEGIATAN KERJA PRAKTIK
Kegiatan pengabdian masyarakat ini menghasilkan alat yang berguna untuk masyarakat sebagai upaya pencegahan Covid-19 di Kecamatan Ciracas, Jakarta Timur. Alat yang dihasilkan berupa Washtafel Portable Automatic. Wastafel Portable Automatic terdiri dari tiga subsistem, yaitu kran air otomatis, sabun tangan otomatis, dan pengering tangan otomatis. Alat ini akan dialokasikan pada tempat yang selalu dikunjungi orang banyak, dalam hal ini akan diletakkan pada Masjid Jami Baitul Muslim dan Kantor RW. 01 Ciracas yang terletak di Kecamatan Ciracas, Jakarta Timur. Dengan langkah tersebut diharapkan mampu meminimalisir persebaran Covid-19 di Indonesia khususnya daerah Kecamatan Ciracas, Jakarta Timur. Berikut ini merupakan tahapan dalam pelaksanaan kerja praktik.
1. Pengenalan Lingkungan
Pada pengenalan lingkungan ini dilakukan survei lokasi di lingkungan Kecamatan Ciracas, Jakarta Timur dan setelah dilakukan peninjauan lokasi di beberapa tempat umum telah tersedia fasilitas wastafel konvensional yang dalam penggunaannya masih memerlukan kontak fisik terhadap wastafel, sehingga masyarakat memiliki resiko terkontaminasi oleh virus Covid-19 dan untuk mengatasi permasalahan tersebut, maka diperlukan adanya wastafel yang dapat bekerja secara otomatis tanpa adanya kontak langsung dari pengguna yaitu dengan pembuatan wastafel portable automatic.
2. Studi Kepustakaan
Studi kepustakaan dilakukan dengan memperoleh informasi dan teori dari berbagai referensi yang relevan dengan topik pembahasan, seperti datasheet sensor dan wiring perancangan perakitan alat. Hal ini dilakukan sebagai pengetahuan dasar mengenai teori dari masing-masing sensor sebelum diaplikasikan pada pengujian sensor.
5 3. Perakitan Alat dan Pengambilan Data
Sebelum dilakukan perakitan alat, dilakukan terlebih dahulu desain perancangan wiring diagram alat dengan menggunakan software Fritzing dan Tinkercad. Selanjutnya, komponen yang dibutuhkan dirakit untuk dilakukan pengujian terhadap berbagai sensor, selain itu dalam pengujian sensor ini dilakukan juga pengambilan data pengujian untuk diolah kembali sebagai bahan analisa perbandingan kualitas dari berbagai sensor.
4. Penyelesaian Kerja Praktik dan Sosialisasi Wastafel Portable Automatic
Pada tahapan ini, semua rangkaian per-subsystem yang telah dirakit diintegrasikan menjadi satu sistem wastafel portable automatic dan dilakukan penyerahan alat kepada pengurus Masjid Jami Baitul Muslim dan Kantor RW. 01 Ciracas serta melakukan sosialisasi kepada masyarakat mengenai himbauan pencegahan Covid-19 dan cara penggunaan dan maintenance wastafel portable automatic. Hal tersebut bertujuan agar mitra pengabdian masyarakat dapat mengetahui langkah-langkah pencegahan penularan Covid-19 dengan selalu mematuhi protokol kesehatan sesuai aturan yang berlaku dan mitra pengabdian masyarakat dapat mengetahui mengenai cara penggunaan wastafel portable automatic dan cara perawatan alat tersebut.
6 BAB III
HASIL KERJA PRAKTIK
3.1 Desain Objective
Wastafel portable automatic dirancang untuk mengurangi kontak fisik antara manusia dengan komponen pada wastafel. Hal ini bertujuan agar dapat mengurangi penyebaran virus Covid-19 yang dapat mengkontaminasi komponen wastafel, sehingga diperlukan suatu solusi agar wastafel dapat bekerja tanpa adanya sentuhan. Dengan adanya permasalahan tersebut, maka dapat diperoleh sebuah solusi yaitu dengan pembuatan wastafel otomatis.
Pada topik pembahasan ini digunakan sensor sebagai suatu komponen yang dapat memicu relay module untuk mengaktifkan solenoid valve yang dapat mengatur aliran air, sehingga wastafel akan bekerja secara otomatis tanpa adanya sentuhan. Dengan adanya karakteristik dari sensor yang bermacam-macam, maka pada pengujian ini akan dilakukan beberapa pengujian wastafel otomatis dengan menggunakan berbagai macam sensor, seperti sensor ultrasonik HC-SR04, sensor PIR, sensor IR obstacle, dan sensor adjustable proximity infrared E18-D80NK.
3.2 Desain Perancangan Alat
3.2.1 Desain Kerangka Wastafel Portable Automatic
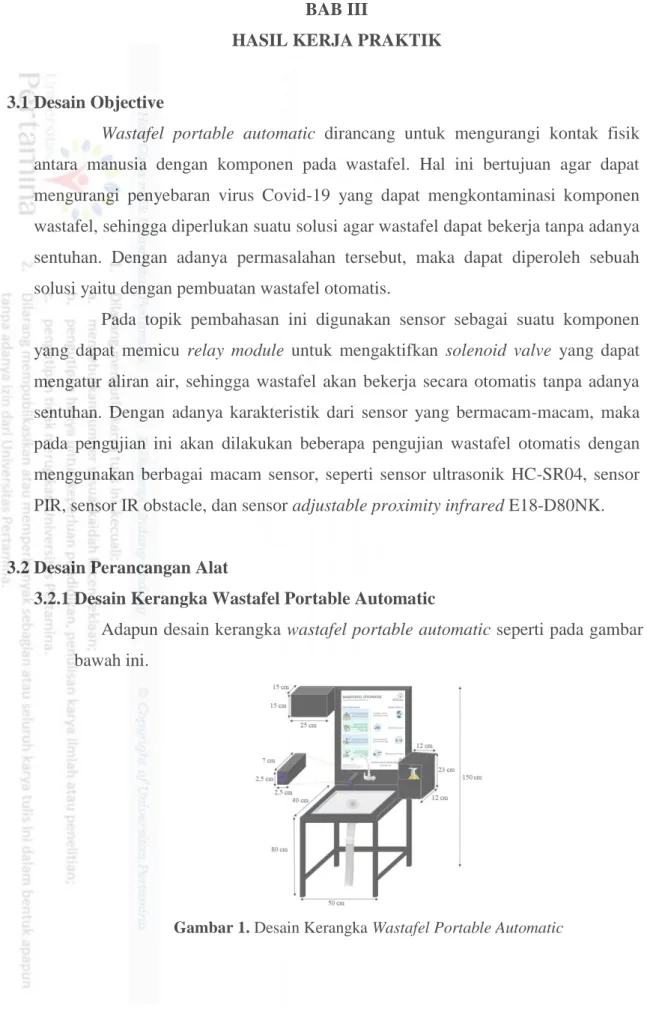
Adapun desain kerangka wastafel portable automatic seperti pada gambar di bawah ini.
7 Desain perancangan kerangka pada wastafel portable automatic ini digunakan besi hollow. Dengan tinggi kerangka 150cm, kemudian terdapat sink yang berukuran 50x40 cm dengan tinggi dari atas permukaan tanah sebesar 80cm. Selain itu, plat besi dengan ukuran 50x70cm digunakan untuk meletakkan kran air dengan sensor dan terdapat poster tentang cara penggunaan wastafel portable automatic dan upaya pencegahan penyebaran virus Covid-19 seperti pada gambar di bawah ini.
Gambar 2. Desain Poster Wastafel Portable Automatic
Poster dirancang dengan ukuran 50x40cm. Pada samping kanan plat besi terdapat kerangka untuk meletakkan pengering otomatis dengan ukuran 25x15cm, kemudian pada sisi yang lain terdapat suatu penyangga untuk meletakkan sabun otomatis yang berukuran 12x12x23 cm.
3.2.2 Komponen Pengujian
Adapun komponen-komponen yang digunakan selama proses pengujian berlangsung. Berikut ini merupakan daftar komponen pada proses pengujian. Tabel 1. Komponen dalam proses pengujian sensor
No. Nama Peralatan Spesifikasi Jumlah
1. Kabel Jumper Female to Male 20cm 1 set
8 A. Pengujian Sensor Ultrasonik HC-SR04
1. Sensor Ultrasonik HC-SR04 1 unit
2. Arduino Uno Atmega328 1 unit
3. Relay 1 Channel 5V DC Outout 250VAC
30VDC 10A Module for Arduino
1 unit
4. Solenoid Valve Solenoid Valve Electric Magnetic Water Air NC 12 V 0.5”
1 unit
5. Adapter 12V 2A 1 unit
B. Pengujian Sensor PIR
1. Sensor PIR HC-SR501 1 unit
2. Arduino Uno Atmega328 1 unit
3. Relay 1 Channel 5V DC Outout 250VAC
30VDC 10A Module for Arduino
1 unit
4. Solenoid Valve Solenoid Valve Electric Magnetic Water Air NC 12 V 0.5”
1 unit
5. Adapter 12V 2A 1 unit
C. Pengujian Sensor Infrared Obstacle
1. Sensor Infrared Obstacle 1 unit
2. Arduino Uno Atmega328 1 unit
3. Relay 1 Channel 5V DC Outout 250VAC
30VDC 10A Module for Arduino
1 unit
4. Servo Motor Mg996 1 0 1 unit
D. Pengujian Sensor Adjustable Proximity Infrared E18-D80NK 1. Sensor Proximity
Adjustable Infrared
E18-D80NK 3-80cm 1 unit
2. Voltage Regulator AMS1117 5V Regulator StepDown Module
1 unit
3. Relay 1 Channel 5V DC Outout 250VAC
30VDC 10A Module for Arduino
1 unit
4. Solenoid Valve Solenoid Valve Electric Magnetic Water Air NC 12 V 0.5”
1 unit
9 3.2.3 Desain Rangkaian
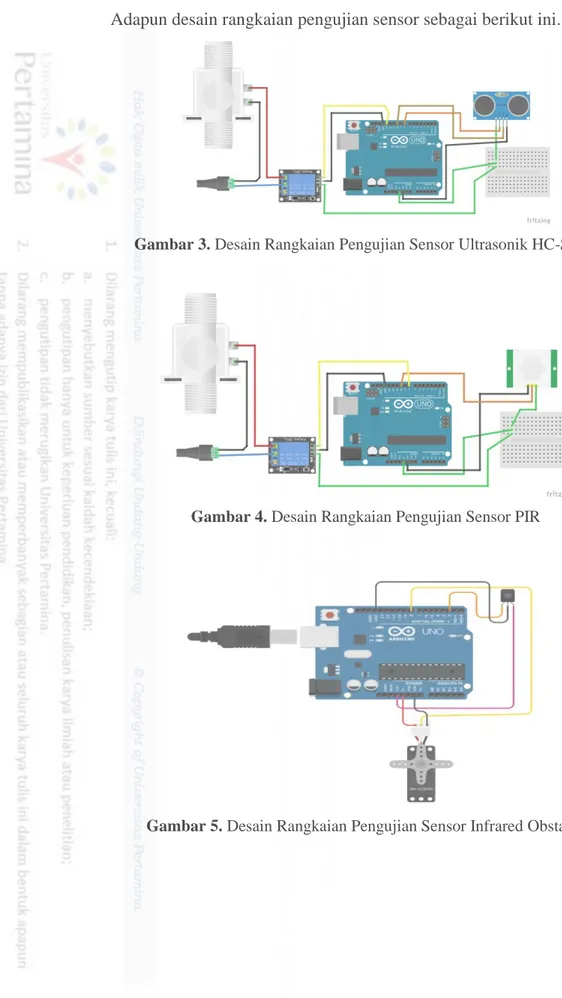
Adapun desain rangkaian pengujian sensor sebagai berikut ini.
Gambar 3. Desain Rangkaian Pengujian Sensor Ultrasonik HC-SR04
Gambar 4. Desain Rangkaian Pengujian Sensor PIR
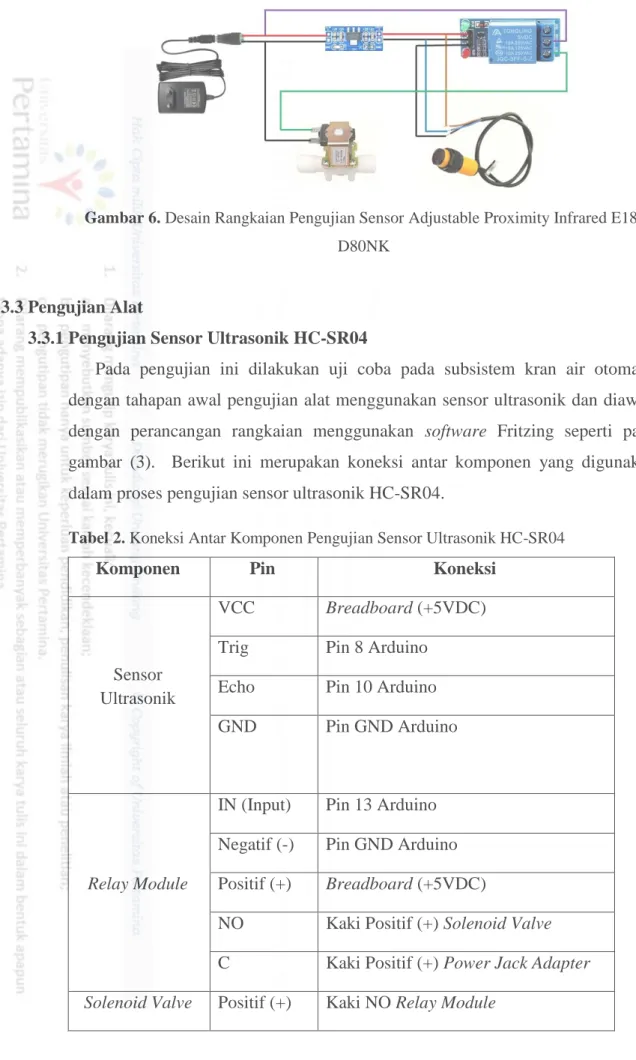
10 Gambar 6. Desain Rangkaian Pengujian Sensor Adjustable Proximity Infrared
E18-D80NK
3.3 Pengujian Alat
3.3.1 Pengujian Sensor Ultrasonik HC-SR04
Pada pengujian ini dilakukan uji coba pada subsistem kran air otomatis dengan tahapan awal pengujian alat menggunakan sensor ultrasonik dan diawali dengan perancangan rangkaian menggunakan software Fritzing seperti pada gambar (3). Berikut ini merupakan koneksi antar komponen yang digunakan dalam proses pengujian sensor ultrasonik HC-SR04.
Tabel 2. Koneksi Antar Komponen Pengujian Sensor Ultrasonik HC-SR04
Komponen Pin Koneksi
Sensor Ultrasonik
VCC Breadboard (+5VDC)
Trig Pin 8 Arduino
Echo Pin 10 Arduino
GND Pin GND Arduino
Relay Module
IN (Input) Pin 13 Arduino Negatif (-) Pin GND Arduino Positif (+) Breadboard (+5VDC)
NO Kaki Positif (+) Solenoid Valve
C Kaki Positif (+) Power Jack Adapter
11 Negatif (-) Kaki negatif (-) Power Jack Adapter
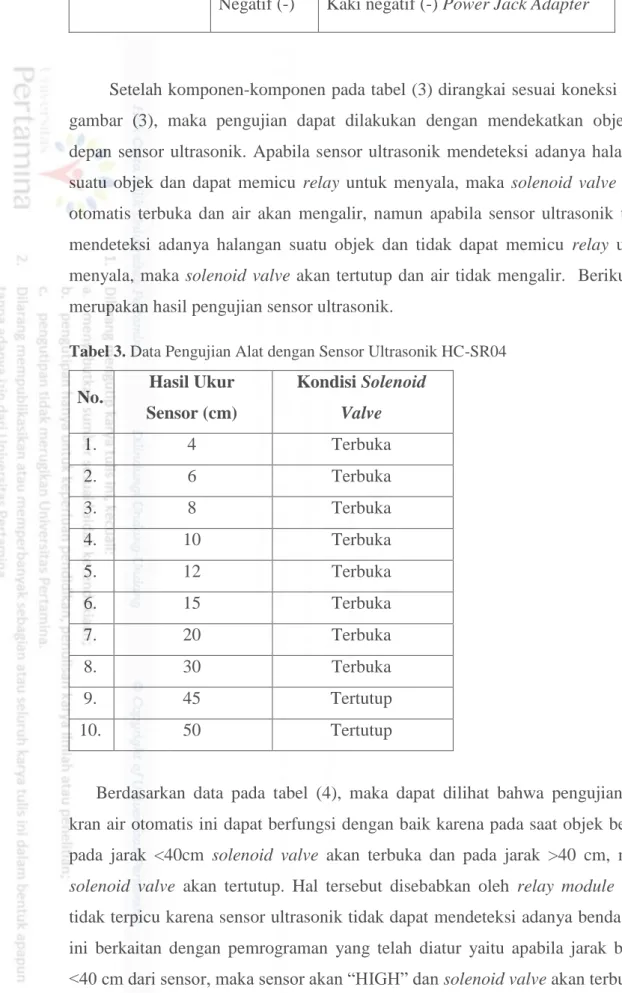
Setelah komponen-komponen pada tabel (3) dirangkai sesuai koneksi pada gambar (3), maka pengujian dapat dilakukan dengan mendekatkan objek di depan sensor ultrasonik. Apabila sensor ultrasonik mendeteksi adanya halangan suatu objek dan dapat memicu relay untuk menyala, maka solenoid valve akan otomatis terbuka dan air akan mengalir, namun apabila sensor ultrasonik tidak mendeteksi adanya halangan suatu objek dan tidak dapat memicu relay untuk menyala, maka solenoid valve akan tertutup dan air tidak mengalir. Berikut ini merupakan hasil pengujian sensor ultrasonik.
Tabel 3. Data Pengujian Alat dengan Sensor Ultrasonik HC-SR04
No. Hasil Ukur
Sensor (cm) Kondisi Solenoid Valve 1. 4 Terbuka 2. 6 Terbuka 3. 8 Terbuka 4. 10 Terbuka 5. 12 Terbuka 6. 15 Terbuka 7. 20 Terbuka 8. 30 Terbuka 9. 45 Tertutup 10. 50 Tertutup
Berdasarkan data pada tabel (4), maka dapat dilihat bahwa pengujian alat kran air otomatis ini dapat berfungsi dengan baik karena pada saat objek berada pada jarak <40cm solenoid valve akan terbuka dan pada jarak >40 cm, maka solenoid valve akan tertutup. Hal tersebut disebabkan oleh relay module yang tidak terpicu karena sensor ultrasonik tidak dapat mendeteksi adanya benda. Hal ini berkaitan dengan pemrograman yang telah diatur yaitu apabila jarak benda <40 cm dari sensor, maka sensor akan “HIGH” dan solenoid valve akan terbuka.
12 Setelah dilakukan pengujian, maka dapat diperoleh bahwa dengan menggunakan sensor ultrasonik memiliki kelebihan, yaitu harganya murah dan beberapa kelemahan, yaitu perawatan dan pengguanaan cukup sulit apabila diterapkan oleh masyarakat karena dalam penggunaannya perlu adanya proses pemrograman agar sensor dapat bekerja sesuai dengan jarak yang diinginkan, sensor tidak tahan air, solenoid valve cepat panas.
3.3.2 Pengujian Sensor PIR
Pada pengujian ini dilakukan uji coba pada subsistem kran air otomatis dengan tahapan awal pengujian alat menggunakan sensor PIR dan diawali dengan perancangan rangkaian menggunakan software Fritzing seperti pada gambar (4). Berikut ini merupakan koneksi antar komponen yang digunakan dalam proses pengujian sensor PIR.
Tabel 4. Koneksi Antar Komponen Pengujian Sensor PIR
Komponen Pin Koneksi
Sensor PIR
VCC Breadboard (+5VDC)
Out Pin 10 Arduino
GND Pin GND Arduino
Relay Module
IN (Input) Pin 8 Arduino Negatif (-) Pin GND Arduino Positif (+) Breadboard (+5VDC)
NO Kaki Positif (+) Solenoid Valve
C Kaki Positif (+) Power Jack Adapter
Solenoid Valve
Positif (+) Kaki NO Relay Module
Negatif (-) Kaki negatif (-) Power Jack Adapter
Setelah komponen-komponen pada tabel (5) dirangkai sesuai koneksi pada gambar (4), maka pengujian dapat dilakukan dengan mendekatkan objek di sekitar sensor PIR. Apabila sensor PIR mendeteksi adanya pergerakan dan dapat memicu relay untuk menyala, maka solenoid valve akan otomatis terbuka dan air
13 akan mengalir, namun apabila sensor PIR tidak dapat mendeteksi adanya pergerakan dan tidak dapat memicu relay untuk menyala, maka solenoid valve akan tertutup dan air tidak mengalir. Berikut ini merupakan hasil pengujian sensor PIR.
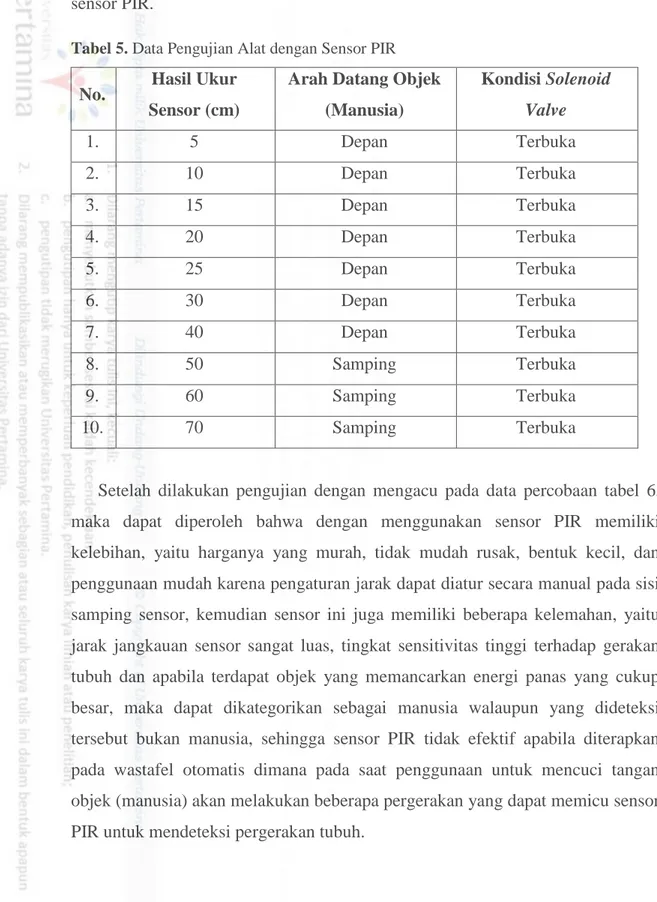
Tabel 5. Data Pengujian Alat dengan Sensor PIR
No. Hasil Ukur
Sensor (cm)
Arah Datang Objek (Manusia) Kondisi Solenoid Valve 1. 5 Depan Terbuka 2. 10 Depan Terbuka 3. 15 Depan Terbuka 4. 20 Depan Terbuka 5. 25 Depan Terbuka 6. 30 Depan Terbuka 7. 40 Depan Terbuka 8. 50 Samping Terbuka 9. 60 Samping Terbuka 10. 70 Samping Terbuka
Setelah dilakukan pengujian dengan mengacu pada data percobaan tabel 6, maka dapat diperoleh bahwa dengan menggunakan sensor PIR memiliki kelebihan, yaitu harganya yang murah, tidak mudah rusak, bentuk kecil, dan penggunaan mudah karena pengaturan jarak dapat diatur secara manual pada sisi samping sensor, kemudian sensor ini juga memiliki beberapa kelemahan, yaitu jarak jangkauan sensor sangat luas, tingkat sensitivitas tinggi terhadap gerakan tubuh dan apabila terdapat objek yang memancarkan energi panas yang cukup besar, maka dapat dikategorikan sebagai manusia walaupun yang dideteksi tersebut bukan manusia, sehingga sensor PIR tidak efektif apabila diterapkan pada wastafel otomatis dimana pada saat penggunaan untuk mencuci tangan objek (manusia) akan melakukan beberapa pergerakan yang dapat memicu sensor PIR untuk mendeteksi pergerakan tubuh.
14 3.3.3 Pengujian Sensor Infrared Obstacle
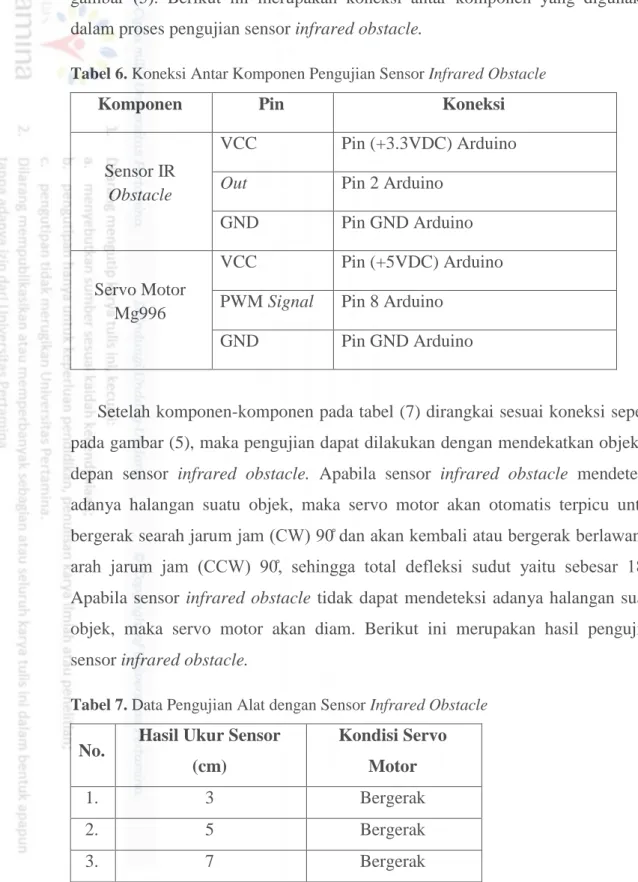
Pada pengujian ini dilakukan uji coba pada subsistem sabun otomatis dengan tahapan awal pengujian alat menggunakan sensor infrared obstacle dan diawali dengan perancangan rangkaian menggunakan software Tinkercad seperti pada gambar (5). Berikut ini merupakan koneksi antar komponen yang digunakan dalam proses pengujian sensor infrared obstacle.
Tabel 6. Koneksi Antar Komponen Pengujian Sensor Infrared Obstacle
Komponen Pin Koneksi
Sensor IR Obstacle
VCC Pin (+3.3VDC) Arduino
Out Pin 2 Arduino
GND Pin GND Arduino
Servo Motor Mg996
VCC Pin (+5VDC) Arduino
PWM Signal Pin 8 Arduino
GND Pin GND Arduino
Setelah komponen-komponen pada tabel (7) dirangkai sesuai koneksi seperti pada gambar (5), maka pengujian dapat dilakukan dengan mendekatkan objek di depan sensor infrared obstacle. Apabila sensor infrared obstacle mendeteksi adanya halangan suatu objek, maka servo motor akan otomatis terpicu untuk bergerak searah jarum jam CW 90 dan akan kembali atau bergerak berlawanan arah jarum jam CCW 90 , sehingga total defleksi sudut yaitu sebesar 1 0 . Apabila sensor infrared obstacle tidak dapat mendeteksi adanya halangan suatu objek, maka servo motor akan diam. Berikut ini merupakan hasil pengujian sensor infrared obstacle.
Tabel 7. Data Pengujian Alat dengan Sensor Infrared Obstacle
No. Hasil Ukur Sensor
(cm) Kondisi Servo Motor 1. 3 Bergerak 2. 5 Bergerak 3. 7 Bergerak
15 4. 10 Diam 5. 12 Diam 6. 15 Diam 7. 17 Diam 8. 20 Diam 9. 25 Diam 10. 30 Diam
erdasarkan data pada tabel , maka dapat dilihat bahwa pengujian alat sabun otomatis ini dapat berfungsi dengan baik karena pada saat objek berada pada jarak cm, maka servo akan bekerja untuk berputar searah jarum jam 90 dan kembali berputar berlawanan arah jarum jam 90 , namun ketika jarak objek >7cm dari sensor, maka servo akan diam dan tidak dapat menggerakkan tuas tempat sabun. Hal tersebut disebabkan oleh servo motor yang tidak terpicu karena sensor IR obstacle tidak dapat mendeteksi adanya benda. Hal ini berkaitan dengan pengaturan pada jarak deteksi benda yang diatur sejauh 7cm.
Setelah dilakukan pengujian, maka dapat diperoleh bahwa dengan menggunakan sensor IR obstacle memiliki kelebihan, yaitu harganya murah dan penggunaan yang mudah karena jarak deteksi dapat diatur secara manual, kemudian terdapat juga beberapa kelemahan, yaitu sensor tidak tahan air, sensor sensitif terhadap cahaya.
3.3.4 Pengujian Sensor Adjustable Proximity Infrared E18-D80NK
Pada pengujian ini dilakukan uji coba pada subsistem kran air otomatis dengan tahapan awal pengujian alat menggunakan sensor adjustable proximity infrared E18-D80NK seperti pada gambar (6). Berikut ini merupakan koneksi antar komponen yang digunakan dalam proses pengujian sensor adjustable proximity infrared E18-D80NK.
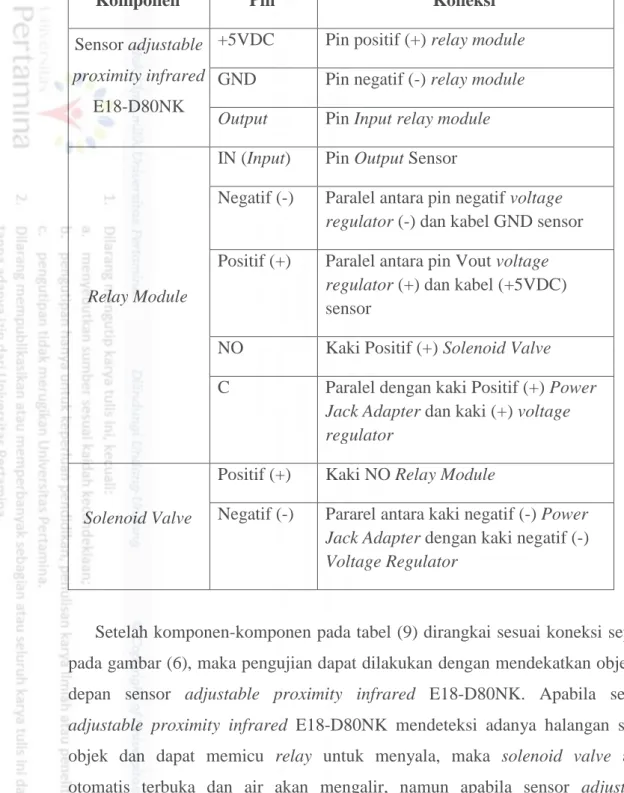
16 Tabel 8. Koneksi Antar Komponen Pengujian Sensor Adjustable Proximity Infrared
E18-D80NK
Komponen Pin Koneksi
Sensor adjustable proximity infrared
E18-D80NK
+5VDC Pin positif (+) relay module
GND Pin negatif (-) relay module
Output Pin Input relay module
Relay Module
IN (Input) Pin Output Sensor
Negatif (-) Paralel antara pin negatif voltage regulator (-) dan kabel GND sensor
Positif (+) Paralel antara pin Vout voltage regulator (+) dan kabel (+5VDC) sensor
NO Kaki Positif (+) Solenoid Valve
C Paralel dengan kaki Positif (+) Power Jack Adapter dan kaki (+) voltage regulator
Solenoid Valve
Positif (+) Kaki NO Relay Module
Negatif (-) Pararel antara kaki negatif (-) Power Jack Adapter dengan kaki negatif (-) Voltage Regulator
Setelah komponen-komponen pada tabel (9) dirangkai sesuai koneksi seperti pada gambar (6), maka pengujian dapat dilakukan dengan mendekatkan objek di depan sensor adjustable proximity infrared E18-D80NK. Apabila sensor adjustable proximity infrared E18-D80NK mendeteksi adanya halangan suatu objek dan dapat memicu relay untuk menyala, maka solenoid valve akan otomatis terbuka dan air akan mengalir, namun apabila sensor adjustable proximity infrared E18-D80NK tidak dapat mendeteksi adanya halangan suatu objek dan tidak dapat memicu relay untuk menyala, maka solenoid valve akan tertutup dan air tidak mengalir. Berikut ini merupakan hasil pengujian sensor adjustable proximity infrared E18-D80NK.
17 Tabel 9. Data Pengujian Alat dengan Sensor Adjustable Proximity Infrared E18-D80NK
No. Hasil Ukur
Sensor (cm) Kondisi Solenoid Valve 1. 4 Terbuka 2. 6 Terbuka 3. 8 Terbuka 4. 10 Terbuka 5. 12 Terbuka 6. 15 Terbuka 7. 20 Tertutup 8. 25 Tertutup 9. 30 Tertutup 10. 35 Tertutup
Berdasarkan data pada tabel (10), maka dapat dilihat bahwa pengujian alat kran air otomatis ini dapat berfungsi dengan baik karena pada saat objek berada pada jarak 15cm dari sensor, maka solenoid valve akan terbuka dan pada jarak >15 cm, maka solenoid valve akan tertutup. Hal tersebut disebabkan oleh relay module yang tidak terpicu karena sensor adjustable proximity infrared E18-D80NK tidak dapat mendeteksi adanya halangan suatu objek. Hal ini berkaitan dengan pengaturan pada detection distance adjusment di bagian belakang sensor yang telah diatur dengan jarak maksimum 15cm, sehingga apabila jarak benda 15cm dari sensor, maka sensor akan “HIGH” dan solenoid valve akan terbuka.
Setelah dilakukan pengujian, maka dapat diperoleh bahwa dengan menggunakan sensor adjustable proximity infrared E18-D80NK memiliki beberapa kelebihan, yaitu pengguanaan cukup mudah karena dapat digunakan dengan tanpa menggunakan pemrograman untuk mengatur jarak deteksi objek, jarak jangkauan deteksi objek rendah, tingkat sensitivitas rendah dan sensor telah memiliki packaging, sehingga tahan air. Kelemahan dari sensor ini, yaitu harganya yang cukup mahal.
18 BAB IV
TINJAUAN TEORITIS
4.1 Sensor Ultrasonik HC-SR04
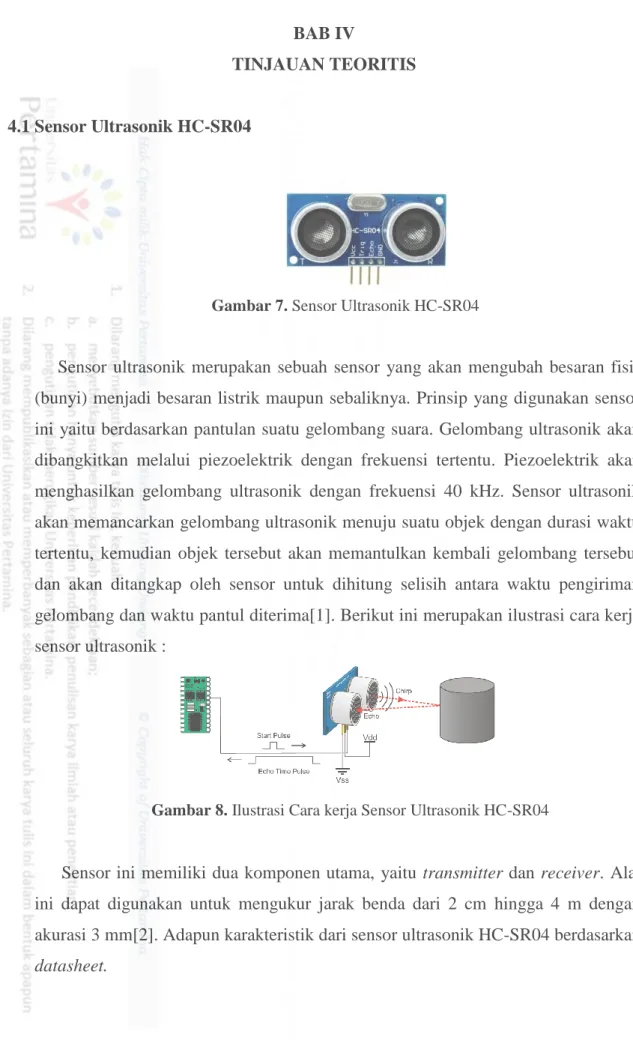
Gambar 7. Sensor Ultrasonik HC-SR04
Sensor ultrasonik merupakan sebuah sensor yang akan mengubah besaran fisis (bunyi) menjadi besaran listrik maupun sebaliknya. Prinsip yang digunakan sensor ini yaitu berdasarkan pantulan suatu gelombang suara. Gelombang ultrasonik akan dibangkitkan melalui piezoelektrik dengan frekuensi tertentu. Piezoelektrik akan menghasilkan gelombang ultrasonik dengan frekuensi 40 kHz. Sensor ultrasonik akan memancarkan gelombang ultrasonik menuju suatu objek dengan durasi waktu tertentu, kemudian objek tersebut akan memantulkan kembali gelombang tersebut dan akan ditangkap oleh sensor untuk dihitung selisih antara waktu pengiriman gelombang dan waktu pantul diterima[1]. Berikut ini merupakan ilustrasi cara kerja sensor ultrasonik :
Gambar 8. Ilustrasi Cara kerja Sensor Ultrasonik HC-SR04
Sensor ini memiliki dua komponen utama, yaitu transmitter dan receiver. Alat ini dapat digunakan untuk mengukur jarak benda dari 2 cm hingga 4 m dengan akurasi 3 mm[2]. Adapun karakteristik dari sensor ultrasonik HC-SR04 berdasarkan datasheet.
19 Tabel 10. Karakteristik Sensor Ultrasonik HC-SR04
Fitur Spesifikasi
Banyak Pin 4 Pin
Vin 5V
Konsumsi Arus 23 mA (3 V)
43 mA (5 V)
Jarak Pembacaan 2-400 cm
Akurasi Pengukuran Jarak Modul
3 mm
Sudut efektif <15oC
Sudut pengukuran 30o
Dimensi 45mmx20mmx15mm
4.2 Sensor Passive Infra Red (PIR)
Sensor PIR merupakan suatu sensor yang akan mendeteksi suatu gerakan berdasarkan temperatur dari suatu objek yang masuk/keluar dari daerah deteksinya[3]. Sensor PIR akan menghasilkan output apabila sensor dihadapkan pada benda panas dengan panjang gelombang infrared 8-14 mm dan benda yang diam seperti sinar lampu yang sangat terang yang mampu menghasilkan panas, pantulan objek dan suhu panas ketika musim panas. Sehingga, sensor ini hanya akan bekerja apabila mendeteksi tubuh manusia karena panjang gelombang yang dihasilkan oleh tubuh manusia 9-10 mm. Hal ini disebabkan oleh adanya IR filter yang dapat menyaring panjang gelombang sinar inframerah pasif. Sensor PIR ini biasanya digunakan pada peralatan elektronika dan gadget pada rumah dan bisnis. [4]. Berikut ini merupakan bentuk fisik dari sensor PIR :
Gambar 9. Sensor PIR
Sensor PIR terbuat dari sensor pyroelektrik yang terbuat dari logam berbentuk bulat dengan kristal segi empat pada bagian tengah yang dapat mendeteksi tingkat radiasi inframerah. Komponen penyusun sensor PIR, yaitu : lensa fresnel, sensor pyroelektrik, penyaring infra merah, IC komparator, dan penguat amplifier. Sensor ini akan menerima radiasi sinar infra merah dan sensor pyroelektrik akan menangkap kemudian masuk melalui lensa fresnel, sehingga akan menghasilkan
20 arus listrik karena kandungan energi kalor yang dimiliki oleh sinar infra merah. Arus listrik tersebut akan menghasilkan suatu tegangan dan akan diproses untuk masuk ke IC komparator. Pada IC komparator akan dilakukan perbandingan antara tegangan yang dihasilkan dari hasil pembacaan sensor dengan tegangan referensi (Vref), sehingga akan menghasilkan output berupa sinyal 1 bit (high) atau 0 bit
(low). Pada kondisi high, maka sensor mendeteksi adanya infra merah, sedangkan pada kondisi low, maka sensor tidak dapat mendeteksi adanya infra merah. Adapun karakteristik dari sensor PIR berdasarkan datasheet.
Tabel 11. Karakteristik Sensor PIR
Fitur Spesifikasi
Pasokan Arus DC 50 μA
Vin 4.5-20V
Jarak Deteksi Maks. 7 m Waktu Respon ±0.3s-5 min
Diameter 23 mm
Sudut deteksi 110o
Suhu -15oC hingga 70oC
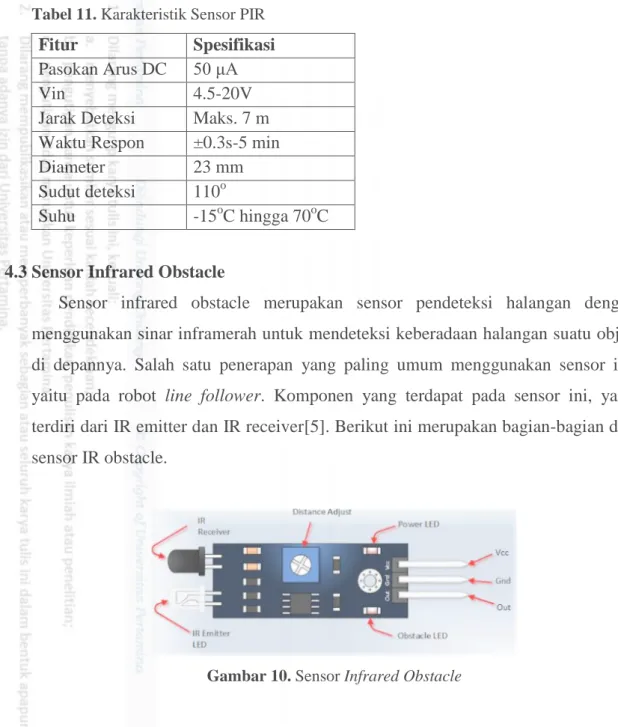
4.3 Sensor Infrared Obstacle
Sensor infrared obstacle merupakan sensor pendeteksi halangan dengan menggunakan sinar inframerah untuk mendeteksi keberadaan halangan suatu objek di depannya. Salah satu penerapan yang paling umum menggunakan sensor ini, yaitu pada robot line follower. Komponen yang terdapat pada sensor ini, yaitu terdiri dari IR emitter dan IR receiver[5]. Berikut ini merupakan bagian-bagian dari sensor IR obstacle.
Gambar 10. Sensor InfraredObstacle
Cara kerja dari sensor ini yaitu lampu LED (IR emitter) pemancar inframerah akan memancarkan sinar inframerah dan apabila sinar inframerah tersebut
21 menabrak suatu objek di depannya, maka akan terpantul dan akan diterima oleh photodiode (IR receiver) untuk kemudian memberikan sinyal bahwa adanya objek yang menghalangi. Berikut ini merupakan ilustrasi dari cara kerja sensor IR obstacle.
Gambar 11. Ilustrasi Cara Kerja Sensor Infrared Obstacle
Adapun karakteristik dari sensor infrared obstacle berdasarkan datasheet.
Tabel 12. Karakteristik Sensor Infrared Obstacle
Fitur Spesifikasi
Banyak Pin 3 Pin
Vin 3-5V Konsumsi Arus Listrik ~23 mA (3 V) ~43 mA (5 V) Jarak Deteksi 2 – 30 cm Sudut Deteksi 35o
4.4 Sensor Adjustable Proximity Infrared E18-D80NK
Sensor adjustable infrared proximity E18-D80NK ini akan memancarkan sinar infrared menuju suatu objek, lalu sinar infrared akan dipantulkan dan ditangkap oleh sensor adjustable proximity infrared[6]. Berikut ini merupakan ilustrasi dari cara kerja sensor adjustable proximity infrared E18-D80NK :
22 Adapun karakteristik dari sensor adjustable proximity infrared E18-D80NK berdasarkan datasheet.
Tabel 13. Karakteristik Sensor Adjustable Proximity Infrared E18-D80NK
Fitur Spesifikasi
Pasokan Arus DC <25 mA
Vin 5V
Arus Beban maksimum 100 mA
Waktu Respon <2 ms
Diameter 17 mm
Sudut deteksi 15o efektif dari 3-80 cm
23 BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan proses kerja praktik yang telah dilakukan, maka dapat disimpulkan bahwa wastafel portable automatic sangat berguna untuk mengatasi permasalahan yang ada di tengah pandemi Covid-19 ini. Dengan adanya wastafel portable automatic, maka dapat mengurangi kontak fisik antara pengguna atau masyarakat dengan wastafel otomatis, sehingga dapat meminimalisir penyebaran virus yang semakin luas. Pada topik ini dilakukan empat pengujian dengan sensor yang berbeda-beda untuk melakukan perbandingan dan memperoleh sensor yang efektif apabila diterapkan pada wastafel portable automatic. Dari keempat pengujian tersebut dapat diperoleh bahwa sensor adjustable proximity infrared E18-D80NK merupakan sensor yang paling efektif dibandingkan dengan sensor yang lainnya. Hal tersebut disebabkan oleh penggunaan sensor yang mudah karena dapat digunakan oleh masyarakat tanpa menggunakan pemrograman, lalu jarak deteksi pada sensor tersebut dapat diatur secara manual pada bagian belakang sensor, sehingga mempermudah masyarakat dalam mengatur jarak deteksi sesuai kebutuhan. Selain itu, sensor ini telah dilengkapi packaging yang dapat melindungi komponen elektronika dari percikan air, kemudian sensor ini juga memiliki rentang jarak jangkauan deteksi yang relatif rendah dan tingkat sensitivitas sensor rendah.
5.2 Saran
Setelah dilakukan penelitian mengenai perbandingan dengan menggunakan beberapa sensor, maka akan lebih baik apabila dilakukan pengujian beberapa sensor untuk wastafel portable automatic dengan mengacu pada kecepatan sensor dalam mendeteksi adanya suatu objek, sehingga pemilihan sensor akan memiliki lebih banyak pertimbangan.
24 DAFTAR PUSTAKA
[1] . Setyawan, S. Andryana, dan Winarsih, “Jurnal Informatika Merdeka Pasuruan”, Sistem Deteksi Menggunakan Sensor Ultrasonik berbasis Arduino mega 2560 dan Processing untuk Sistem Keamanan Rumah, vol. 3, No.3, Desember 2018
[2] Elang Sakti. (2015). Cara Kerja Sensor Ultrasonik, Rangkaian, & Aplikasinya. Available : https://www.elangsakti.com/2015/05/sensor-ultrasonik.html
[3] E. T. Indarto, E. Leksono, dan E. M. udi, “Perancangan Sistem Pendeteksi Kehadiran Manusia menggunakan Sensor Kinect”, vol. , 1 , 2015.
[4] L. Ada. (2020, Januari). PIR Motion Sensor. Adafruit Learning System. [Online]. Available : https://learn.adafruit.com/pir-passive-infrared-proximity-motion-sensor
[5] A. Khan, “Review of Techniques and Methods for Object Detection”, International Journal of Advances in Computer Science and Technology, vo. 8, (2), February 2019 [6] Anonim, “Wiring the E1 -D 0NK Infrared Distance Ranging Sensor,” unpublished.
25 LAMPIRAN
26 Lampiran 1.
27 Lampiran 2.
28 Lampiran 3.
Lampiran 6 – Lembar Bimbingan Pembimbing Program Studi
LEMBAR BIMBINGAN KERJA PRAKTIK
Nama : Anisa Dheayanti NIM : 102117029 Program Studi : Teknik Elektro
No. Hari/Tanggal: Senin/12 Oktober 2020
Hal yang menjadi perhatian:
1. Laporan kemajuan proses pengerjaanbagian
otomatisasi dan mekanik washtafel portable
automatic
Paraf Pembimbing:
No. Hari/Tanggal: Selasa/27 Oktober 2020
Hal yang menjadi perhatian:
1. Update mengenai pengabdian masyarakat dari
LPPMI terkait dana tambahan
Paraf Pembimbing:
No. Hari/Tanggal: Senin/30 Oktober 2020
Hal yang menjadi perhatian:
1. Update progress report kerangka wastafel
2. Penentuan bahan material untuk pembuatan
kerangka washtafel portable automatic
Paraf Pembimbing:
No. Hari/Tanggal: Senin/09 November 2020
Hal yang menjadi perhatian:
1. Laporan kemajuan pembuatan washtafel portable
automatic
2. Konsultasi proses administrasi lembar bimbingan,
daftar hadir, dan perpanjangan waktu kerja praktik
Paraf Pembimbing:
No. Hari/Tanggal: Kamis, 17 Desember 2020
Hal yang menjadi perhatian:
1. Feedback laporan akhir kerja praktik
2. Persiapan mengenai berkas persyaratan seminar
kerja praktik
Paraf Pembimbing:
UNIVERSITAS PERTAMINA FAKULTAS TEKNOLOGI INDUSTRI
Jl. Teuku Nyak Arief, Simprug, Kebayoran Lama, Jakarta Selatan 12220, Telp + 6221 29044308 www.universitaspertamina.ac.id
SURAT KETERANGAN Nomor: 0091/UP-DKN4/SKET/XI/2020
Yang bertanda tangan di bawah ini:
Nama : Dr.Eng. Wahyu Kunto Wibowo, S.T., M.Eng. NIP : 116059
Jabatan : Ketua Program Studi Teknik Elektro Menerangkan bahwa Mahasiswa berikut:
Nama : Anisa Dheayanti NIM : 102117029 Program Studi : Teknik Elektro
Akan melaksanakan Kerja Praktik Alternatif (PKM) di: Tempat KP : Kecamatan Ciracas – Jakarta Timur
Alamat : Jl. Masjid 04 RT. 011/ RW. 007, Kelurahan Susukan, Kecamatan Ciracas, Jakarta Timur
Tema : Pembuatan Bilik Disinfektan Otomatis sebagai Upaya Pencegahan Penyebaran Virus Covid-19 di Kecamatan Ciracas – Jakarta Timur
Demikian Surat Keterangan ini dikeluarkan untuk dapat dipergunakan dengan penuh tanggung jawab.
Jakarta, 04 November 2020
a.n. Dekan Fakultas Teknologi Industri Ketua Program Studi Teknik Elektro
Dr.Eng. Wahyu Kunto Wibowo, S.T., M.Eng. NIP. 116059