BAB 3
PERANCANGAN SISTEM
Bab ini akan membahas tentang perancangan sistem yang digunakan pada robot. Dalam membuat suatu sistem harus dilakukan analisis mengenai sistem yang akan dirancang. Pembuatan robot di bahasan perancangan awal dimulai dari struktur robot dan analisa keseimbangan robot dimana analisa keseimbangan terdiri dari dari tahapan yaitu analisa titik pusat massa dan analisa titik pusat massa pada tumpuan yang berbeda. Dari analisa diatas maka akan dapat ditentukan gait yang akan digunakan pada robot.
Perancangan selanjutnya adalah mengenai perangkat keras dari robot. Perangkat keras robot terdiri dari konstruksi robot dan perangkat elektronik. Konstruksi akan membahas tentang bagian dari tubuh robot dimulai dari kaki yang terdiri dari tiga bagian femur, tibia dan coxa, bahan yang digunakan serta dimensinya, servo dan lain-lain. Pada perangkat elektronik akan dibahas komponen elektronik yang akan digunakan, skematik dan daya yang dibutuhkan oleh robot. Perancangan terakhir adalah perancangan perangkat lunak. Perangkat lunak meliputi progam yang dibuat dan juga diagram alur dari program.
3.1. Perancangan Perangkat Keras 3.1.1. Rancangan Awal
Perancangan sistem pada penelitian ini akan membahas tentang perancangan robot enam kaki yang mampu menghindari atau melewati rintangan dengan tambahan sensor sehingga mampu beradaptasi dengan lingkungan yang baru. Beberapa penelitian
62
mengenai robot berkaki telah dilakukan oleh mahasiswa Universitas Bina Nusantara yang terakhir adalah Holonomic Walking Robot pada tahun 2007 oleh Zweist, Isnan dan Jati. Pada tahun 2006 Fransiska, Suhandi, dan Yosafat dengan judul Walking robot dengan servo dan pada tahun 2002 dengan judul Pengembangan Walking Robot oleh Aan dan Deny.
Ketiga skripsi diatas mempunyai sistem dan orientasi yang berbeda dari bentuk kaki dan gait sehingga mempunyai karakteristik tersendiri. Robot hasil penelitian Aan dan Deny merupakan robot pneumatik sehingga tidak melakukan pendekatan secara biologis sedangkan robot hasil penelitian Fransiska,Suhandy dan Yosafat melakukan pendekatan secara biologis dalam arti bentuk struktur robot dan gait yang digunakan menyerupai anjing. Robot hasil penelitian Zweist, Isnan dan Jati dikatakan mempunyai gabungan keduanya karena robot tersebut memiliki pendekatan secara biologis namun tidak sepenuhnya meniru hewan tertentu.
Sistem yang dirancang merupakan pengembangan dari robot hasil penelitian Zweist, Isnan dan Jati karena menggabungkan kedua skripsi sebelumnya yaitu pendekatan secara biologis tapi tidak meniru sepenuhnya meniru hewan tertentu. Pengembangan dilakukan pada kemampuan robot mampu melewati rintangan dan juga terdapat sensor sehingga robot mampu beradaptasi dengan lingkungan.
Tujuan robot ini diteliti adalah untuk mempelajari pengembangan gait pada robot tipe hexapod (berkaki enam) yang dinilai sebagai robot berkaki yang paling seimbang saat bergerak di permukaan yang tidak selalu datar.
3.1.2. Perbandingan Dengan Penelitian Sebelumnya
Untuk penelitian ini, dilakukan perbandingan terhadap penelitian sebelumnya yang dilakukan oleh Zweist, Isnan, dan Jati dengan judul Walking Robot.
Revisi dan kesimpulan dari penelitian Zweist, Isnan, dan Jati.
¾ Walaupun robot dapat berjalan sesuai gait yang dirancang, masih terdapat penyimpangan pada arah pergerakan. Penyimpangan disebabkan konstruksi mekanik yang tidak sempurna baik dalam panjang kaki maupun alas kaki yang sering slip.
¾ Memakai ATtiny2313 dengan port 11-16 dipasangkan pada Servo Controller.
¾ Power Supply 6 V untuk Onboard Controller. ¾ Robot sering condong ke satu sisi.
¾ Pemilihan baterai amat penting pada penelitian ini. ¾ Gait harus dimodifikasi agar pergerakan lebih lurus.
¾ Kecepatan dan struktur mekanik alas kaki mempengaruhi gerak dorong robot.
¾ Perancangan mekanik secara menyeluruh sebelum dilakukannya pembuatan sangat membantu dalam menghasilkan produk akhir maksimal.
Saran untuk penelitian ini adalah:
Dalam pembuatan rangka bangun harus dibuat ahli. Alas kaki kuat dan tak licin agar tidak slip.
64
Kaki lebih banyak agar lebih seimbang.
Tabel gait pada eeprom dibuat lebih dinamis dengan panjang berbeda-beda disertai dengan delay antar step yang bervariasi.
Revisi dan kesimpulan dari penelitian Ferdi, Robert, dan Dede tentang Quad pod Robot for Ladder Application:
Struktur mekanik badan robot yang berbentuk persegi panjang menyulitkan robot untuk naik dan turun tangga, dan mempengaruhi keseimbangan robot saat melakukan pergerakan.
Penggunaan servo controller memudahkan dalam hal pemrograman, hal ini dapat terlihat dari percobaan pertama tanpa menggunakan servo controller, array yang digunakan adalah 12 x 280 hanya untuk gait jalan sedangkan pada percobaan menggunakan servo controller hanya memerlukan array sebanyak 12 x 181 untuk melakukan semua gait.
Saran untuk penelitian ini adalah:
• Melakukan analisa pusat massa dan keseimbangan robot sebelum menentukan struktur mekanik yang digunakan.
• Menggunakan supply dengan arus tidak kurang dari 3 ampere dan jumlah cell yang banyak untuk mengatasi masalah kebutuhan supply yang banyak pada motor servo.
Tabel 3.1 Perbandingan Penelitian sebelumnya dengan penelitian sekarang
No. Robot Sebelumnya (2009) Robot Hexapod
1 Robot berkaki 4 (Quadpod)
Robot berkaki 6 (hexapod)
2 Total memakai 12 servo
Total memakai 18 Servo
3 Servo menggunakan power supply
Servo menggunakan baterai
Dengan melihat perbandingan-perbandingan inilah, robot yang akan dikembangkan sekarang diharapkan memiliki fitur yang sama atau lebih baik daripada pendahulunya.
3.1.3. Perancangan Perangkat Elektronik
Pada subbab ini akan dijelaskan mengenai cara perancangan dan sistem kerja dari robot hexapod yang dibangun.
Gambar 3.1 Blok Diagram Seperti terlihat di halaman berikut:
66
Tombol ON Switch Tombol Gait
ATMega8535 SSC‐32 Servo 13 Servo 15 Servo 14 Servo 4 Servo 6 Servo 5 Servo 16 Servo 18 Servo 17 Servo 10 Servo 12 Servo 11 Servo 7 Servo 9 Servo 8 Servo 1 Servo 3 Servo 2 Kaki 1 Kaki 2 Kaki 6 Kaki 5 Kaki 3 Kaki 4 Gambar 3.1 Blok Diagram Hexapod
Penjelasan Blok Diagram:
¾ AVR Atmega8535: sebagai otak dari robot hexapod. Semua program untuk pengendalian robot terdapat di AVR sebagai pusat pengendalian robot.
¾ Tombol/Switch: switch yang digunakan adalah 1 switch latching dan 2 push button. Tombol-tombol ini berfungsi sebagai tombol ON, gait, dan RESET. Tombol-tombol ini berfungsi sebagai input bagi AVR. ¾ Servo Controller (SSC-32): berperan sebagai pengendali servo-servo.
Dalam robot ini, digunakan 1 servo controller. Servo controller ini dapat mengontrol 18 motor servo secara sekaligus.
¾ Kaki: melambangkan alat gerak robot yang terdiri dari coxa, femur, dan tibia. Setiap bagian ini memiliki 1 servo yang mengatur sudut pergerakan dari tiap joint robot.
¾ Servo: merupakan penggerak joint yang terdapat pada tiap sendi kaki robot. Gerakannya dalam sudut disimbolkan dalam x, y, dan z. Coxa, femur, dan tibia memiliki servonya masing-masing. Total servo yang digunakan adalah 18 buah, 3 servo di setiap kaki.
68
70
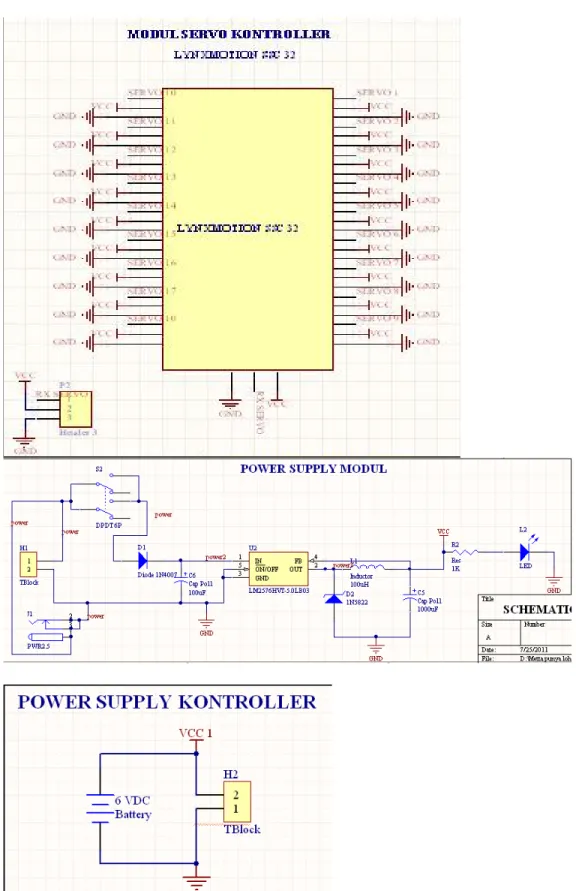
Penjelasan gambar skematik:
Dalam penggunaannya, Atmega8535 menggunakan dudukan IC dengan jumlah pin yang sama, agar AVR ini mudah dibongkar-pasang untuk kepentingan penulisan program. Program yang digunakan adalah CodeVisionAVR C Compiler. Dalam program ini, langkah pertama untuk menuliskan program adalah dengan membuat skematik untuk mengetahui pin mana saja dari AVR yang akan digunakan dalam rangkaian robot hexapod ini.
AVR ini pada penerapannya memerlukan XTAL. Pada aplikasinya sekarang, digunakan XTAL 11,0592 MHz pada pin 12 dan 13. XTAL ini dipakai sebagai oscillator, untuk memberikan sinkronisasi bit pada AVR, dan memberikan sinkronisasi clock sebesar 11,0592 MHz. Clock mengendalikan lalu lintas bit yang terjadi dalam rangkaian. AVR dapat melakukan perintah sebanyak 1 MIPS (Million Instructions Per Second) per MHz, berarti dalam tiap MHz, AVR dapat mengerjakan sebanyak kurang lebih 1,000,000 perintah. Pada AVR ATmega8535, kedua mode ini hampir sama dalam hal pengaturan. Perbedaan hanya terdapat pada sumber clock saja. Pada transmisi asynchronous, masing-masing peripheral memiliki sumber clock sendiri. Synchronous memerlukan external clock untuk men-sinkronisasi semua peripheral yang digunakan. Secara pengaturan hardware, mode synchronous menggunakan 3 pin, yaitu RXD, TXD, dan XCK. Mode asynchronous menggunakan 2 pin, yaitu RXD dan
TXD. Dapat dilihat pada penelitian hexapod ini, transmisi yang digunakan adalah transmisi asynchronous.
9 Cara kerja servo: sebuah servo terdiri dari sebuah motor DC kecil, beberapa gear, sebuah potensiometer, dan rangkaian feedback control. Tiap servo memiliki 3 kabel, satu kabel untuk input pulsa pengontrol, dan 2 kabel (positif dan negatif) untuk daya listrik yang dibutuhkan motor untuk beroperasi. Sebuah servo menerima command atau pulsa dari receiver setiap beberapa saat, misalkan 20ms. Maka servo itu harus menahan posisi itu selama 20ms sampai mendapatkan pulsa berikut. Servo harus menahan posisi ini, bahkan walaupun gaya-gaya dari permukaan kontrol berusaha membuatnya bergerak.
Potensiometer pada servo digunakan untuk umpan balik (feedback). Potensiometer adalah sebuah resistor yang berubah nilainya setiap kali berputar. Potensiometer berputar bersamaan dengan servo motor. Sirkuit dalam servo mengetahui posisi servo dengan melihat dari tegangan pada potensiometer (resistansi R naik, tegangan V turun). Sirkuit membandingkan posisi yang diberikan receiver dengan posisi yang diindikasikan oleh potensiometer. Sirkuit kemudian menggerakkan servo motor kea rah yang cocok agar mengurangi perbedaan sudut antara receiver dan potensiometer.
72
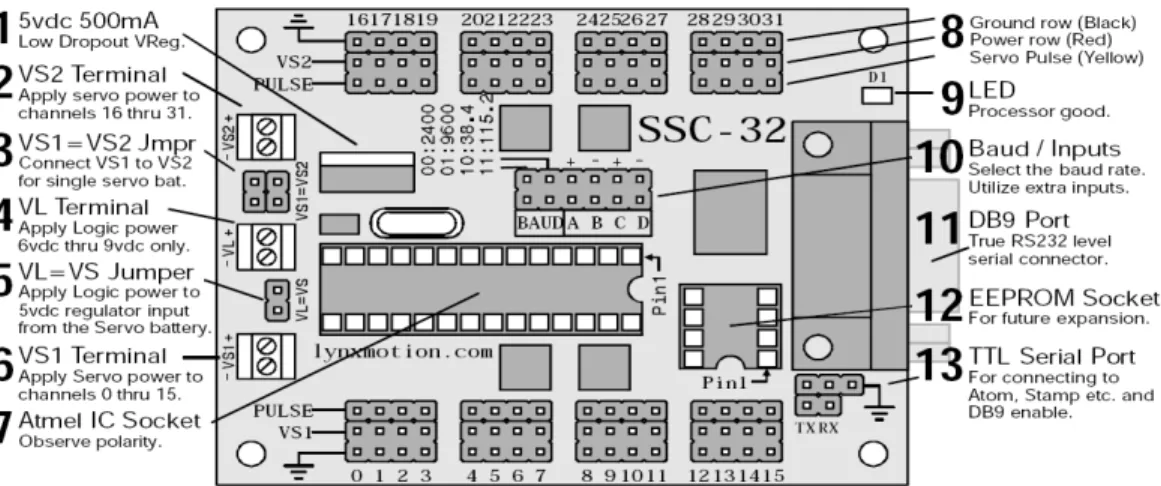
9 Servo Controller SSC-32:
Gambar 3.3 SSC-32
Karena penelitian menggunakan 18 buah servo, maka untuk memudahkan pengaturan dan pengendalian servo-servo tersebut, digunakanlah servo controller. Servo Controller bertugas mengatur lalu lintas data antara mikrokontroler dengan servo-servo. Servo berjumlah 18 buah tersebut dipasangkan pada port-port yang tersedia pada modul SSC-32. Setelah itu pada program yang dituliskan pada mikrokontroler, dibuatlah suatu table array sejumlah yang dibutuhkan. Pada SSC-32 ini juga terdapat setting speed, yang mempengaruhi kecepatan gerak pada servo.
Nomor Servo Yang Acak
Pada lampiran coding terdapat 2 buah variable yaitu ‘i’ dan ‘j’ kedua variable ini digunakan hanya untuk mensorting urutan posisi servo
yang terdapat pada posisi sebenarnya (posisi dimana servo dipasang). Karena keterbatasan tempat dan kurangnya panjang kabel servo motor maka servo motor tidak dipasang berurutan pada portnya.
Karena program coding berjalan secara sequence dari atas ke bawah maka kita harus mengurutkan nomor servo dengan menyesuaikan posisi servo yang seharusnya (port 1, 2,3, … , 18) dengan posisi servo yang sebenarnya dipasang. Maka pada saat program akan membaca servo ke 10 (pada posisi sebenarnya servo 10 terdapat pada port 12) maka fungsi dibawah ini digunakan :
If(i==10)
{j=12;}
Begitu juga selanjutnya hingga ke posisi terakhir servo yaitu 18.
Servo dipasang pada modul ssc-32 di nomor 8 seperti yang terlihat pada Gambar 3.4.
Rangkaian RESET
Setiap mikrokontroller memiliki pin reset, pada AVR pin reset aktif LOW. Pin RESET pada AVR aktif low yang maksudnya reset mikrokontroller akan terjadi jika pin RESET diberi logika 0.
74
1. Membuat semua pin dalam kondisi tri-state (High Impedance) kecuali pin XTAL, menginisialisasi register I/O, dan meng-set counter program kembali ke NOL.
2. Untuk membuat mikrokontroler memulai kembali pembacaan program, hal tersebut dibutuhkan pada saat mikrokontroler mengalami gangguan dalam meng-eksekusi program.
Pin Reset AVR memiliki resistor pull-up internal agar mikro tidak reset sendiri, tetapi resistor pull-up internal ini tidak cukup jika lingkungan memiliki gangguan-gangguan dan mikro dapat reset yang terjadi secara sporadis. Resistor pull-up eksternal dapat digunakan untuk menjaga agar pin RESET tidak berlogika 0 secara tidak disengaja. Besarnya nilai resistor ini secara teori bisa bernilai berapa saja tetapi untuk aplikasinya gunakan nilai resistor yang tepat agar pin RESET dapat diubah logikanya menjadi LOW sehingga dapat diprogram. Nilai pada umumnya dan yang direkomendasikan adalah 10Kohm dan untuk keperluan debugWIRE tidak boleh lebih kecil dari 10Kohm.
Untuk melindungi pin RESET dari noise, ditambahkan kapasitor yang terhubung dengan pin Reset dan Ground. Kapasitor tidak begitu dianjurkan penggunaannya karena AVR telah memiliki low-pass filter internal untuk mengurangi efek bounching pada pin Reset, tetapi
penggunaan kapasitor eksternal lebih kepada proteksi tambahan pada pin reset.
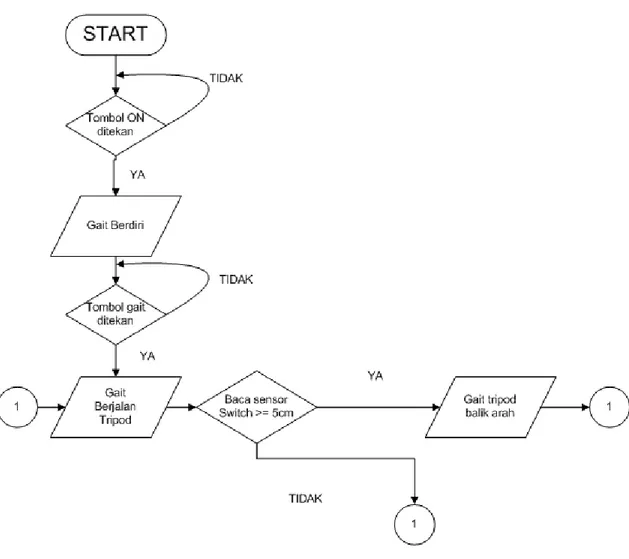
3.1.4. Perancangan Piranti Lunak
Perancangan piranti lunak merupakan salah satu bagian penting dalam penelitian ini karena setiap pergerakan robot diatur berdasarkan program yang disimpan dalam mikrokontroler AVR ATMega8535. Seperti penelitian-penelitian terdahulu dengan tema yang serupa, perancangan piranti lunak pada penelitian ini dilakukan dengan program CodeVisionAVR. Robot dapat berfungsi dengan baik apabila telah diketahui karakteristik dari tiap servo yang telah dibahas pada sub-bab sebelumnya, dan juga harus disertai dengan instruksi-instruksi program yang sesuai dengan rancangan tubuh robot. Prinsip kerja program pada robot akan lebih jelas jika dilihat pada diagram alir yang diperlihatkan pada Gambar di bawah ini.
76
Gambar 3.4 Diagram Alir dari sistem
PEP ver1.09LM.xls
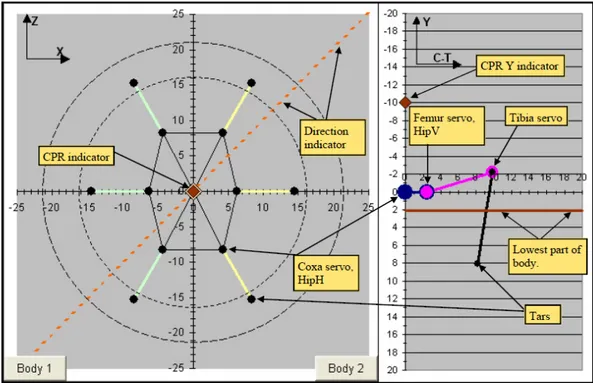
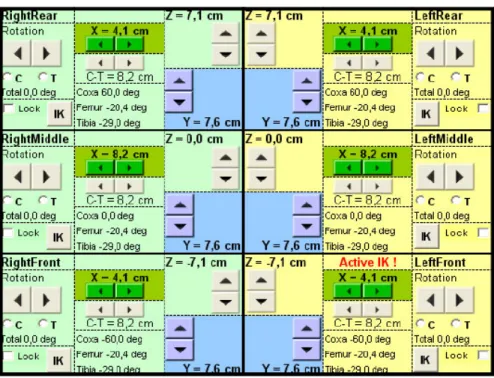
Pada Bab 3 terdapat beberapa table sudut step by step untuk inisialisasi. Pada kesempatan ini penulis akan menjelaskan bagaimana sudut – sudut tersebut didapatkan. Sudut – sudut tersebut didapatkan dengan menggunakan program Microsoft Excel yang telah disediakan oleh Lynxmotion. Nama program Excel tersebut adalah PEP (Phoenix Excel Program). Program Excel PEP ini menggunakan inverse
kinematic dimana kita menggerakkan kaki – kaki robot sesuai dengan yang kita inginkan dan sudutnya akan terbaca dengan sendirinya.
Gambar 3.5 Screenshot 1 Tab Body & Coxa
Pada gambar kiri adalah hexapod tampak dari atas, sedangkan pada gambar kanan adalah posisi kaki hexapod dengan tampak samping. Gambar kanan akan berubah sesuai dengan kaki servo yang ingin kita atur posisinya. Garis coklat yang mengakatakan “Lowest part of body” dimaksudkan adalah posisi dimana semua kaki terangkat dan body hexapod yang menahan seluruh bebannya.
78
Gambar 3.6 Screenshot 2 Tab Body & Coxa
Gambar diatas adalah bagaimana kita menggerakkan kaki secara satu persatu. Warna hijau adalah untuk menggerakkan kaki – kaki kanan dan warna kuning untuk menggerakkan kaki – kaki kiri. Terlihat kita dapat mengatur sumbu – sumbu X, Y, dan Z secara tersendiri secara bebas. Bila melampaui batasnya maka derajat – derajat yang terdapat pada Coxa, Femur, dan Tibia akan berubah warna dari hitam menjadi merah. Setelah mengatur kaki pada posisi yang kita inginkan maka kita harus me-write posisi tersebut.
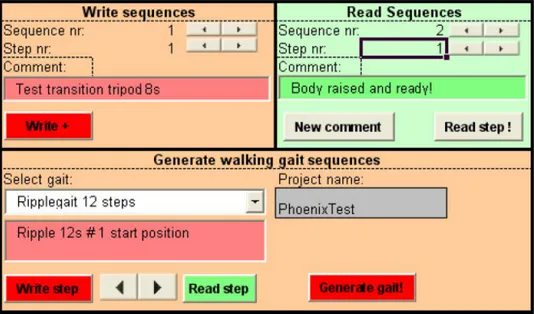
Gambar 3.7 Write Sequences & Read Sequence
Read sequences digunakan untuk mengecek posisi yang telah ter-write. Setelah kita write posisi yang kita inginkan maka sudut – sudut pada setiap kaki tersebut akan terbaca dan akan terlihat pada tab Individual Sequences.
80
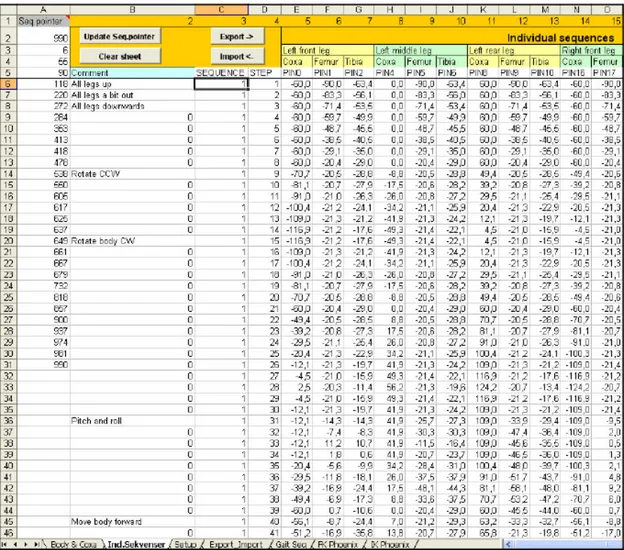
Gambar 3.8 Contoh Tabel Sudut Yang Dihasilkan PEP
Dengan melihat hasil screenshot PEP pada gambar 3.10, maka table array pada lampiran listing program dapat dibuat. Table array pada coding hexapod didapat dengan melihat program tabel hasil simulasi PEP.
Gait
Kebanyakan hexapod dikendalikan dengan gait, yang memungkinkan robot untuk bergerak maju, berputar, dan mungkin berjalan ke samping. Gait yang digunakan adalah :
Wave Gait
Wave gait disebut demikian karena bentuk PWM-nya yang menyerupai gelombang. Dalam pergerakannya, kaki tampak bergerak satu persatu secara bergantian. Berikut skema pergerakannya:
Gambar 3.10 Wave Gait Tripod Gait
Tripod gait terdiri dari kaki depan dan kaki belakang serta kaki tengah pada sisi lainnya. Untuk setiap tripod, kaki diangkat, diturunkan, dan
82
digerakkan maju mundur secara bersamaan. Pada saat berjalan, hexapod menggunakan kedua tripod-nya mirip dengan biped yang melangkah dari satu kaki ke kaki lain. Karena 3 kaki selalu berada di tanah, maka gait tersebut akan selalu stabil. Berikut adalah skema dari tripod gait :
Gambar 3.11 Gait Tripod
3.2. Diagram Alir dan Pergerakan Robot
Pergerakan robot hexapod ini menggunakan 2 gait yaitu Wave dan Tripod. Namun pada kajian keseimbangan kali ini, yang kami teliti adalah gait Tripod, dimana gait ini secara teoritis sangat seimbang dan efektif, dimana setiap kali robot bergerak, terdapat 3 kaki menahan bodi robot agar tidak jatuh ke permukaan. Wave gait dibuat semata untuk melengkapi pengembangan gait robot ini, tetapi tidak termasuk dalam materi bahasan keseimbangan. Tiga kaki pada gait tripod yang dimaksud seperti digambarkan berikut ini:
Gambar 3.12 Tripod Gait
(Sumber: http://www.robotshop.ca/robot-leg-tutorial.html)
Seperti telah dijelaskan sebelumnya, kaki yang digunakan pada robot ini berjumlah 6 buah, dengan 3 joint yang digerakkan oleh servo pada tiap kaki. Dengan demikian, jumlah servo yang dipakai dalam penelitian ini adalah sebanyak 18 servo.
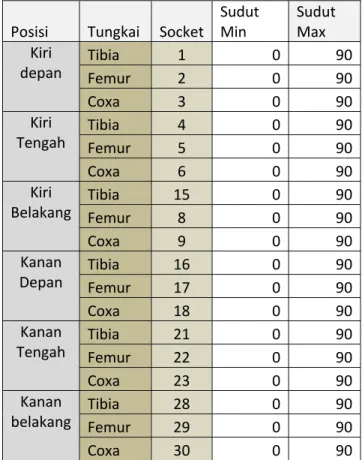
Tabel 3.2 Sudut Pergerakan Servo
Posisi Tungkai Socket
Sudut Min Sudut Max Kiri depan Tibia 1 0 90 Femur 2 0 90 Coxa 3 0 90 Kiri Tengah Tibia 4 0 90 Femur 5 0 90 Coxa 6 0 90 Kiri Belakang Tibia 15 0 90 Femur 8 0 90 Coxa 9 0 90 Kanan Depan Tibia 16 0 90 Femur 17 0 90 Coxa 18 0 90 Kanan Tengah Tibia 21 0 90 Femur 22 0 90 Coxa 23 0 90 Kanan belakang Tibia 28 0 90 Femur 29 0 90 Coxa 30 0 90
84
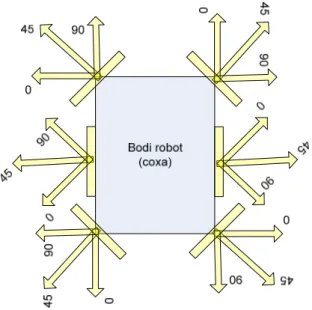
Di bawah ini adalah gambar arah pergerakan sudut joint Coxa di setiap kaki robot:
Gambar 3.13 Arah sudut pergerakan Coxa
Pada bagian Femur arah pergerakan sudut antara kaki depan dan belakang adalah sama, sedangkan arah pergerakan untuk kaki kiri dan kanan berbeda. Di bawah ini adalah gambar arah sudut pergerakan Femur pada kaki sebelah kiri dan kanan.
Gambar 3.14 Arah sudut pergerakan Femur
Pada bagian Tibia arah pergerakan sudut antara kaki depan dan belakang adalah sama, sedangkan arah pergerakan untuk kaki kiri dan kanan berbeda. Di
bawah ini adalah gambar arah sudut pergerakan Tibia pada kaki sebelah kiri dan kanan.
Gambar 3.15 Arah sudut pergerakan Tibia
3.2.1. Gait Berdiri
Gait berdiri merupakan gait yang harus dilakukan pertama kali oleh robot sebelum melakukan gait lainnya. Setiap sudut yang dibentuk pada masing masing servo dalam setiap step dapat dilihat. Gait ini hanya terdiri dari satu step saja. Setiap kaki mempunyai sudut yang sama sehingga mampu menjaga keseimbangan saat berdiri. Berikut adalah tabel sudut gait untuk gait berdiri:
Tabel 3.3 Tabel Sudut Gait Berdiri
Servo Sudut derajat 1 4.05 2 2.15 3 ‐8.1 4 ‐0.19 5 9 6 0 15 ‐0.52 8 3.89
86 16 ‐13.6 17 ‐11.07 18 4.5 21 ‐11.7 22 ‐3.74 23 0 28 ‐10.1 29 ‐11 30 27.9
Gambar 3.16 Gait Berdiri Tampak Belakang
Gambar 3.17 Gait Berdiri Tampak Atas
3.2.2. Gait Inisialisasi
Gait ini dilakukan untuk memeriksa apakah servo-servo telah fungsional dari coxa, femur, hingga tibia. Robot cenderung terlihat seperti menari. Berikut merupakan tabel sudut yang disimpan di dalam mikrokontroler dan dikirim ke robot untuk melakukan gerakanini:
Tabel 3.4 Step 1 sampai 13 Gait Sudut Inisialisasi
Tabel 3.5 Step 14 sampai 26 Gait Sudut Inisialisasi
Gait inisialisasi menggerakkan masing-masing servo secara berurutan, membuat robot mengangkat masing-masing kaki satu persatu, menaikkan 2
88
kaki depan, condong kiri, condong kanan, condong depan, condong belakang, juga posisi tertinggi dan terendah.
3.2.3. Gait Wave Maju
Gait jalan Wave dilakukan dengan menggerakkan satu persatu kaki robot.secara berurutan. Disebut wave karena gait ini memiliki bentuk sinyal PWM yang jika diurutkan akan membentuk gelombang ombak. Gerakan memiliki sekuens yang cukup panjang, namun karena saat bergerak terdapat 5 kaki yang menjejak tanah, maka kemungkinan robot terjatuh menjadi sangat kecil.
90
Gambar 3.20 Step 1 Gait Wave Maju
Gambar 3.21 Step 2 Gait Wave Maju
92
Gambar 3.23 Step 4 Gait Wave Maju
Gambar 3.24 Step 5 Gait Wave Maju
Gambar 3.26 Step 7 Gait Wave Maju
Gambar 3.27 Step 8 Gait Wave Maju
3.2.4. Gait Jalan Tripod
Setelah berdiri, gerakan dasar yang harus dilakukan robot adalah berjalan. Gait yang digunakan disini adalah Gait Tripod, karena itu kaki yang diangkat selalu dalam jumlah 3 kaki dengan kombinasi 2-1, yaitu 2 kaki dari sisi kiri, 1 kaki sebelah kanan, dan sebaliknya. Pada sisi dengan 2 kaki yang diangkat, yang diangkat adalah kaki terluar. Pada sisi dengan 1 kaki yang diangkat, yang diangkat adalah kaki di tengah (Kaki 2 atau Kaki 5).
94
Gambar 3.28 Diagram Alir Gait Jalan Tripod
Pada diagram alir ini, digambarkan kaki bergerak secara satu persatu. Tiap kaki ini melangkah dengan mengangkat kaki, lalu menjatuhkannya pada satu arah sesuai yang tertera pada diagram alir. Robot dapat menggerakkan 3
kaki sekaligus, agar step-step gerakan dapat dilakukan dengan lebih cepat dan efisien waktu dan tenaga. Berikut adalah skema Gait Maju Tripod:
Tabel 3.8 Tabel sudut step gait jalan tripod
Posisi Tungkai Servo Step 1 Step 2 Step 3 Step 4 Step 5 Step 6 Kiri depan Tibia 1 4.05 -25.9 -25.9 4.05 4.05 4.05 Femur 2 2.15 -27.2 -27.2 2.15 2.15 2.15 Coxa 3 -8.1 -8.1 7.9 7.9 -8.1 -8.1 Kanan Depan Tibia 4 -0.19 -0.19 -0.19 -0.19 -30.2 -30.19 Femur 5 9 9 9 9 -21 -21 Coxa 6 0 -15 -15 -15 -15 0 Kiri Tengah Tibia 15 -0.52 -29.4 -29.4 -0.52 -0.52 -0.52 Femur 8 3.89 -26.1 -26.1 3.89 3.89 3.89 Coxa 9 15.1 15.1 30.1 30.1 15.1 15.1 Kanan Tengah Tibia 16 -13.6 -13.6 -13.6 -13.6 26.4 26.4 Femur 17 -11.07 -11.07 -11.07 -11.07 28.93 28.93 Coxa 18 4.5 19.5 19.5 19.5 19.5 4.5 Kiri Belakang Tibia 21 -11.7 18.3 18.3 -11.7 -11.7 -11.7 Femur 22 -3.74 26.2 26.2 -3.74 -3.74 -3.74 Coxa 23 0 0 -15 -15 -15 0 Kanan belakang Tibia 28 -10.1 -10.1 -10.1 -10.1 30 30 Femur 29 -11 -11 -11 -11 30.9 30.9
96
Coxa 30 27.9 42.9 42.9 42.9 42.9 27.9
Gambar 3.29 Step 1 Gait Jalan Tripod (Tampak Atas)
kaki1 kaki2 kaki3 kaki6 kaki5 kak i4
Gambar 3.30 Step 2 Gait Jalan Tripod (Tampak Atas)
kaki1 kaki2 kaki3 ka ki6 kaki5 kak i4
kaki1 kaki2 kaki3 ka ki6 kaki5 kak i4
Gambar 3.32 Step 4 Gait Jalan Tripod (Tampak Atas)
Gambar 3.33 Step 5 Gait Jalan Tripod (Tampak Atas)
98
3.2.5. Gait Berputar Balik Tripod (Menghindari Rintangan)
Gait berputar balik dengan cara melakukan gait berbelok 90 derajat ke kanan sebanyak jumlah yang diperlukan sampai menghadap sisi yang berlawanan 1800.
100 kaki6 kaki5
Gambar 3.36 Step 1 sampai 4 Gait Putar Balik Tripod
Gambar 3.38 Step 9 sampai 10 Gait Putar Balik Tripod
Gait ini diulangi terus sampai bodi robot menghadap sisi 180 derajat berlawanan dari sisi awal. Setelah gait berbelok di atas diselesaikan, coxa di semua kaki menarik badan, mengembalikannya ke posisi awal (berdiri).
3.2.6. Gait Berputar Balik Wave (Menghindari Rintangan)
Dengan melakukan gait yang sama berulang kali (3 kali) maka robot dapat berputar-balik jika mendapat interrupt pada tombol gait. Dengan begitu robot dapat menghindari rintangan.
102
104
Gambar 3.40 Step 1-4 Gait Putar Balik Wave ke Kanan
k a k i1 k a k i2 ka k i3 ka ki6 ka ki5 ka ki4 7
Gambar 3.42 Step 9-12 Gait Putar Balik Wave ke Kanan
ka ki3 ka ki6 ka ki5 1 6
106 kaki6 kaki 5 kaki4 19
Gambar 3.44 Step 17-20 Gait Putar Balik Wave ke Kanan
3.3. Konstruksi Robot 3.3.1. Analisa Pusat Massa
Dengan bentuk tubuh dari robot persegi panjang maka pusat massa berada ditengah. Pada gambar dibawah terlihat pusat massa berada ditengah yaitu pada koordinat X(1/2 P, 1/2 L)
Gambar 3.45 Titik pusat massa pada bidang persegi panjang
Pentingnya diketahui pusat massa karena untuk menentukan keseimbangan robot sehingga pada saat posisi berdiri diam ataupun saat berjalan robot tidak
kehilangan keseimbangan dan jatuh. Perlu diketahui pusat massa dapat berubah sesuai gaya yang didapat dari pegerakan kaki robot sesuai dengan sudut pergerakan yang dibuat.
3.3.2. Analisa Gaya Pada Sendi dan Keseimbangan Robot Dynamic stability
Robot berjalan yang stabil saat bergerak harus terus bergerak agar tidak jatuh. Jika saat berjalan robot berhenti bergerak, pusat massa akan membuatnya terjatuh.
Static stability
Robot stabil yang statis dapat diberhentikan pergerakannya pada titik manapun dalam gait-nya dan tidak akan jatuh. Dalam kasus hexapod, selama ada 3 kaki manapun yang bersentuhan dengan lantai dan pusat massa ditempatkan di dalam segitiga yang terbentuk dari kaki-kaki ini, maka robot akan berdiri stabil saat statis.
Gambar 3.46 Model Tripod
Sudut-sudut yang di bentuk kaki tidak perlu berbanding lurus terhadap satu dengan yang lain, seperti gambar berikut:
108
Gambar 3.47 Sudut Kaki Pada Hexapod Gaya yang terjadi pada setiap joint pada kaki hexapod:
Gambar 3.48 Gaya Pada Sendi Robot (Sumber:
Rumus perhitungan untuk joint-joint tersebut: ) 3 ...( ... ... )... 3 2 2 cos * 2 2 1 cos * 1 2 ( * 2 2 )... 3 2 2 cos * 2 2 1 cos * 1 ( * 1 2 ) 3 2 2 cos * 2 1 cos * 1 ( * 2 2 )... 2 cos * 2 1 cos * 1 3 2 ( * 3 2 ) 3 2 cos * 2 1 cos * 1 ( * 4 ) 2 cos * 2 ... 1 cos * 1 ( * 3 ) 2 cos * 2 1 cos * 1 ( * 2 1 cos * 1 * 1 ) 2 ...( ... ... ... )... 3 2 1 ( * 6 4 2 2 1 ) 1 ...( ... ... ... 4 3* L L L N L L L W L L L W L L L W L L L W L L W L L W L W T W W W W N N W W W W W FOOT LEFT LEGS BATTERY ELECT FRAME + + + + + − + + − + + − + + − + − + − − = + + + = + + + + =
∑
− θ θ θ θ θ θ θ θ θ θ θ θ θ θ θPersamaan (1) menjelaskan W4 (weight) yang terjadi pada pusat massa robot saat 3 kaki diangkat.
Persamaan (2): Massa robot diasumsikan terdistribusi seimbang pada kaki di kedua sisi robot pada sisi kanan. Maka gaya reaksi N2 dan N3 bernilai sama. Tiga kaki harus menahan seluruh berat robot, juga berat kaki itu sendiri.
Persamaan (3) menjelaskan cara mencari torka dari N1 untuk mendapatkan N2 (normal force). ) 1 cos * 1 3 2 2 cos * 2 2 ( * 2 2 )... 3 2 2 cos * 2 ( * 1 2 ) 3 2 2 cos * 2 ( * 2 2 )... 3 2 2 cos * 2 ( * 3 2 ) 3 2 cos * 2 ( * 4 )... 2 cos * 2 ( * 3 ) 2 cos * 2 ( * 2 )... 1 cos * 1 ( * 1 1 θ θ θ θ θ θ θ θ θ L L L N L L W L L W L L W L L W L W L W L N T TKNEE + + + + − + − + − + − − − − =
∑
Persamaan di atas menjelaskan perhitungan gaya saat 3 kaki menahan robot pada sisi kanan. Seperti perhitungan sebelumnya, jumlah torka dari perhitungan ini adalah 0 (pada kasus ini, kaki diam tak bergerak, hanya menahan massa bodi). Torka yang dibutuhkan pada hip joint dapat dicari dengan melakukan persamaan torka berikut:
110 ) 1 cos * 1 2 cos * 2 3 2 ( * 2 2 ) 2 cos * 2 3 2 ( * 1 2 ... 3 * 3 2 3 * 2 2 3 * 4 ) 2 cos * 2 ( * 1 )... 2 cos * 2 1 cos * 1 ( * 1 2 θ θ θ θ θ θ L L L N L L W L W L W L W L W L L N T THIP + + + + − − − − − + − =
∑
Hexapod dengan 3 degree of freedom pada tiap kaki memiliki total 18 degree of freedom dan ada konfigurasi yang memungkinkan kebutuhan torka yang lebih kecil untuk memanjat permukaan miring. Contohnya saat kaki belakang digunakan untuk mendorong robot menaiki kemiringan, sambil kaki depan menarik bodi robot.
Untuk menemukan torka yang dibutuhkan untuk menggerakkan robot menaiki kemiringan dengan tiap kaki ditempatkan identik dengan kaki lain, perspektif berbeda harus diberikan.
Gambar berikut menunjukkan gambar gaya yang terjadi pada joint saat robot mendaki kemiringan.
Gaya reaksi melawan massa robot dapat menyebabkan robot meluncur turun ke bawah. Magnitude dari beban gravitasi sepanjang lereng dapat dihitung dengan: β sin * W Wx =
Persamaan torka pada aktuator bahu kiri:
) 2 cos * 2 1 cos * 1 3 * 2 ( * 2 2 ... 3 ) 2 cos * 2 1 cos * 1 ( * 1 1 5 θ θ θ θ L L L F Wx L L L F T T + + + − + − =
∑
Kemudian, agar dapat bergerak lurus, gaya pada sisi kiri harus sama dengan gaya pada sisi kanan. Jika tidak, robot akan berbelok.
2 * 2
1 F
F =
• Pusat Massa Saat Berdiri dengan 6 Kaki
Pada perhitungan berikut, dilakukan analisa matematis untuk memperkirakan berapa besar beban pada tiap titik yang ditentukan pada gambar.
112
Perhitungan Gaya Terhadap sumbu X: 0 NAX = 1/2L1.W-L1.NF + L1.NE + L1.ND NAX = 1/2L1.W + L1(-NF+NE+ND) ... 3.2 0 NBX = 1/2L1.W + L1(-NF+NE+ND) ... 3.3 0 NCX = 1/2L1.W + L1(-NF+NE+ND) ... 3.4 0 NDX = 1/2L1.W + L1(-NA+NB+NC) ... 3.5 0 NEX = 1/2L1.W + L1(-NA+NB+NC) ... 3.6 0 NFX = 1/2L1.W + L1(-NA+NB+NC) ... 3.7
Perhitungan Gaya Terhadap sumbu Y: 0
NAY = 1/2L2.W – L2.NC –L2.ND - 1/2L2.NB -1/2L2.NE
0 NBY = 0.W - 1/2L2.NA – 1/2L2.NC - 1/2L2.ND - 1/2L2.NF NBY = -1/2L2(NA+NC+ND+NF)... 3.9 0 NEY = 0.W - 1/2L2.NA – 1/2L2.NC - 1/2L2.ND - 1/2L2.NF NEY = -1/2L2(NA+NC+ND+NF) ... 3.10 0 NCY = 1/2L2.W – L2.NA – L2.NF - 1/2L2.NB - 1/2L2.NE NCY = 1/2L2.W – L2(NA+NF) – 1/2L2(NB+NE) ... 3.11 0 NDY = 1/2L2.W – L2.NA – L2.NF - 1/2L2.NB - 1/2L2.NE NDY = 1/2L2.W – L2(NA+NF) – 1/2L2(NB+NE) ... 3.12 0 NFY = 1/2L2.W – L2.NC –L2.ND - 1/2L2.NB -1/2L2.NE NFY = 1/2L2.W – L2(NC+ND) -1/2L2(NB+NE) ... 3.13
Mencari nilai NA, NB, NC, ND, NE, NF dengan L1 = 10 cm DAN L2 = 18 cm:
• NA = NAX + NAY
114 = 5W - 10NF + 10NE + 10ND + 9W - 18NC - 18ND - 9NB - 9NE NA = 14W – 9NB – 18NC - 8ND – NE - 10NF ... 3.14 • NB = NBX + NBY NB = (1/2L1.W – L1.NF +L1.NE + L1.ND) + (-1/2L2(NA+NC+ND+NF)) NB = 5W – 9NA - 9NC + ND + 10NE – 19NF ... 3.15 • NC = NCX + NCY NC = (1/2L1.W + L1(-NF+NE+ND)) + (1/2L2.W – L2(NA+NF) – 1/2L2(NB+NE)) NC = 14W – 18NA – 9NB + 10ND + NE – 28NF ... 3.16 • ND = NDX + NDY ND = (1/2L1.W + L1(-NA+NB+NC)) + (1/2L2.W - L2(NA+NF) - 1/2L2(NB+NE)) ND = 14W - 28NA + NB + 10NC – 9NE – 18NF ... 3.17 • NE = NEX + NEY NE = (1/2L1.W + L1(-NA+NB+NC)) + (-1/2L2(NA+NC+ND+NF)) NE = 5W – 19NA + 10NB + NC – 9ND – 9NF ... 3.18 • NF = NFX + NFY
NF = (1/2L1.W + L1(-NA+NB+NC)) + (1/2L2.W – L2(NC+ND) – 1/2L2(NB+NE))
NF = 14W – 10NA + NB – 8NC – 18ND - 9NE ... 3.19
Setelah didapatkan NA, NB, NC, ND, NE, NF, maka selanjutnya adalah melakukan eliminasi untuk mendapatkan hasil dari tiap N. Contoh proses eliminasi adalah sebagai berikut:
Eliminasi persamaan 3.16 dengan 3.17:
0 = 14W – 18NA – 9NB - NC + 10ND + NE – 28NF 0 = 14W - 28NA + NB + 10NC - ND – 9NE – 18NF
Kedua persamaan ini boleh dijumlahkan ataupun diselisihkan, asalkan terdapat satu atau lebih komponen yang menjadi 0 sehingga komponen tersebut dapat dihilangkan pada persamaan baru. Pada persamaan ini, kedua persamaan akan dikurangkan: 14 18 9 1 10 1 28 - 14 28 1 10 1 9 18 = 0 10 10 11 11 10 10
Maka hasil dari eliminasi ini adalah:
0 = 10NA – 10NB – 11NC + 11ND + 10NE – 10NF ... 3.20
Contoh berikutnya adalah eliminasi antara 3.14 dan 3.15. Karena tidak terdapat komponen yang dapat habis dijumlahkan, maka salah satu persamaan harus dikalikan
116
bilangan yang sesuai agar salah satu komponen dapat habis. Pada persamaan ini, 3.15 dikalikan dengan konstanta 2 agar NC dapat habis diselisihkan.
Eliminasi 3.14 dan 3.15
0 = 14W – NA - 9NB – 18NC - 8ND – NE - 10NF
0 = 5W – 9NA – NB - 9NC + ND + 10NE – 19NF dikalikan konst. 2
14 1 9 18 8 1 10 - 10 18 2 18 2 20 38 = 4 17 7 0 10 21 28
Maka hasil eliminasi 3.14 dan 3.15 adalah:
0 = 4W + 17NA – 7NB – 10ND – 21NE + 28NF ... 3.21
Berikutnya adalah daftar eliminasi yang dilakukan dan hasilnya. 1. Eliminasi persamaan 3.18 & 3.15
0 = -10NA + 11NB + 10NC – 10ND – 11NE + 10NF ... 3.22 2. Eliminasi persamaan 3.19 & 3.17
0 = 18NA – 18NC – 17ND + 17NF ... 3.23 3. Eliminasi persamaan 3.14 & 3.16
0 = 17NA – 17NC – 18ND - 2NE + 18NF... 3.24 4. Eliminasi persamaan 3.14 & 3.17
0 = 27NA – 10NB - 28NC – 7ND +8NE +8NF ... 3.25 5. Eliminasi persamaan 3.14 & 3.19
6. Eliminasi persamaan 3.22 dengan k=18 & 3.23 dengan k=10
0 = 198NB - 350ND - 198NE + 350NF ... 3.27 7. Eliminasi persamaan 3.22 k=17 & 3.24 k=10
0 = 187NB – 350ND – 207NE + 350NF ... 3.28 8. Eliminasi persamaan 3.22 k=27 & 3.25 k=10
0 = 197NB – 10NC - 340ND – 217NE + 190NF ... 3.29 9. Eliminasi persamaan 3.22 k=9 & 3.26 k=10
0 = -NB – 10NC + 10ND - 19NE... 3.30 10. Eliminasi persamaan 3.23 k=17 & 3.24 k=18
0 = 35ND + 36NE + 35NF ... 3.31 11. Eliminasi persamaan 3.29 & 3.30
0 = 198NB - 350ND + 198NE + 190NF ... 3.32 12. Eliminasi persamaan 3.27 & 3.28
0 = 11NB + 9NE
NE = (-11/9)NB ... 3.33 13. Substitusikan 3.33 ke dalam 3.31
ND = 44/35NB – NF ... 3.34 14. Substitusikan 3.33 & 3.34 ke dalam 3.32
NB = (180/121)NF ... 3.35 15. Substitusikan 3.35 ke dalam 3.33
NE = (-20/11)NF ... 3.36 16. Substitusikan 3.35 ke dalam 3.34
118 NC = 58.18NF ... 3.38 18. Substitusikan 3.35, 3.36, 3.37, 3.38 ke dalam 3.22 0 = -10NA + 11NB +10NC – 10ND – 11NE +10NF 10NA = 11((180/121)NF) + 10(58.18NF) – 10(67/77)NF – 11(-20/11)NF + 10NF NA = 61.95NF ... 3.39 19. Substitusikan 3.35, 3.36, 3.37, 3.38, 3.39 ke dalam 3.18 NF = 0.0045W ... 3.40 20. Substitusikan 3.40 ke 3.35, 3.36, 3.37, 3.38, dan 3.39 NA = 0.28W NB = 0.0067W NC = 0.26W ND = 0.004W NE = -0.0082W NF = 0.0045W
Maka dari persamaan-persamaan di atas didapatlah gaya yang terdapat pada tiap titik pada gambar La.1. Terdapat 6 titik, dan hampir semuanya bernilai positif, kecuali titik E, walaupun nilai pada E kurang signifikan karena bernilai sangat kecil.
• Pusat Massa Saat Berdiri Dengan 3 Kaki
Setelah menghitung gaya saat robot berdiri dengan 6 kaki, maka selanjutnya adalah penghitungan gaya saat robot berdiri dengan 3 kaki, yaitu jumlah kaki minimal untuk menjaga agar robot tetap berdiri.
Gambar 3.51 Pusat Massa Saat Berdiri Dengan 3 Kaki Perhitungan gaya terhadap sumbu X:
0 NAX = 1/2L1.W + L1.NE
NCX = 1/2L1.W + L1.NE
NEX = 1/2L1.W – L1.NA + L1.NC
Perhitungan gaya terhadap sumbu Y:
0 NAY = 1/2L2.W – L2.NC - 1/2L2.NE NCY = 1/2L2.W – L2.NA – 1/2L2.NE NEY = -1/2L2.NA – 1/2L2.NC Maka: • NA = NAX + NAY NA = (1/2L1.W+L1.NE) + (1/2L2.W – L2.NC - 1/2L2.NE)
120
NA = 5W + 10NE + 9W – 9NE - 18NC
0 = 14W – NA – 18NC + NE ... 3.41 • NC = NCX + NCY
NC = (1/2L1.W + L1.NE) + (1/2L2.W – L2.NA – 1/2L2.NE) NC = 5W + 10NE + 9W – 18NA – 9NE
0 = 14W - 18NA – NC + NE ... 3.42 • NE = NEX + NEY
NE = (1/2L1.W – L1.NA + L1.NC) + (-1/2L2.NA – 1/2L2.NC) NE = 5W – 10NA + 10NC - 9NA – 9NC
0 = 5W – 19NA + NC – NE ... 3.43 Selanjutnya adalah proses-proses berikut:
1) Eliminasikan 3.41 & 3.42 0 = 17NA – 17NC
NC = NA ... 3.44 2) Eliminasikan 3.41 & 3.43
0 = 19W – 20NA – 17NC substitusikan dengan 3.44 0 = 19W – 20NA – 17NA
NA = (19/37)W ... 3.45 3) Substitusikan 3.44 & 3.45 ke dalam 3.43
0 = 5W – 19NA +NC – NE
0 = 5W – 19(19/37)W+ (19/37)W – NE NE = 5W – 9.69W +0.51W
NE = -4.18W ... 3.46 4) Substitusikan 3.46 ke dalam 3.45 dan 3.44
Maka didapatkan hasil berikut: NA = 0.51W
NC = 0.51W NE = -4.18W
Dengan demikian, secara perhitungan, gaya yang terjadi pada saat robot berdiri dengan 3 kaki adalah memiliki nilai seperti di atas. Nilai negative pada NE berarti beban pada NE lebih besar daripada NC dan NA.
3.4. Struktur Robot
Bagian ini akan membahas konstuksi robot secara menyeluruh dari dimensi, berat dan bahan dari konstruksi robot. Konstruksi robot terbagi menjadi dua bagian pertama adalah kaki robot dan tubuh robot
Kaki robot terdiri dari tiga bagian yaitu : • Femur
• Tibia • Coxa
Setiap bagian mempuyai fungsi yang berbeda. Setiap fungsi dari bagian tersebut akan dibahas pada bagian di bawah ini.
122
Gambar 3.52 Tibia
Salah satu dari bagian kaki robot yaitu tibia. Tibia mempunyai tinggi 15 cm dan lebar 5 cm sedangkan ketebalan mencapai 3 mm. Di dalam tibia terdapat sebuah servo, servo ini berfungsi untuk menggerakan tibia secara vertikal. Servo yang digunakan adalag servo merk Tower pro dengan tipe SG 5010.
Gambar 3.53 Servo Tower Pro SG 5010 Servo ini adalah servo analog dengan dimensi 4 cm X 2 cm X 4,3 cm
Gambar 3.54 Bracket coxa
Coxa terdiri dari bracket servo dan sebuah servo digital. Coxa tersambung dengan tubuh robot dengan begitu kaki robot dapat bergerak secara horizontal. Bracket servo mempunyai dimensi 3,5 cm x 5,7 cm x 2.5 cm dengan ketebalan 3 mm dan bahan yang digunakan adalah aluminium.
Pada Coxa servo yang dipakai adalah servo royal dengan tipe DS 1020 MG, seperti yang terlihat pada gambar di bawah ini.
124
Gambar 3.55 Servo Digital Royal DS 1020MG
Bagian terakhir adalah femur, seperti yang terlihat pada gambar dibawah ini
Gambar 3.56 Femur
Femur menghubungkan antar tibia dan coxa. Pada femur terdapat bracket servo dan satu buah servo, jenis servo yang dipakai sama dengan yang digunakan pada tibia
yaitu servo tower pro dengan tipe SG 5010. Dengan begitu femur dapat begerak secara vertikal. Dimensi dari femur adalah 10cm x 2,5 cm dengan ketebalan 3 mm.
Setelah ketiga bagian tersebut tersambungkan maka akan terbentuk kaki yang mempunyai tiga derajat kebebasan seperti gambar dibawah ini.
Gambar 3.57 Kaki dengan 3 DOF (Degree Of Freedom)
Setelah kaki maka akan dibahas tubuh dari robot. Tubuh dari robot terdiri dari dua bagian seperti yang terlihat pada gambar dibawah ini.
126
Gambar 3.58 Badan robot
Dimensi dari tubuh robot adalah 18 cm x 10 cm dengan ketebalan 3 mm. Kedua bagian tubuh dengan empat buah spacer dengan tinggi 5 cm. Kaki robot akan terhubung pada sudut tubuh robot. Fungsi dari tubuh robot adalah sebagai tempat untuk meletakan baterei dan perangkat elektronik. Dibawah ini adalah gambar dari robot secara utuh: