commit to user
Untuk Memenuhi Sebagian Persyaratan Mencapai Derajad Magister
Program Studi Ilmu Fisika
Oleh :
Wawan Kurniawan
NIM. S911002003
PROGRAM PASCASARJANA
UNIVERSITAS SEBELAS MARET SURAKARTA
2012
commit to user
ii
LEMBAR PERSETUJUAN
RANCANG BANGUN PROTOTIPE SPEKTROMETER
DIGITAL
TESIS
Disusun oleh :
Wawan Kurniawan
NIM. S911002003
Telah Disetujui oleh Tim Pembimbing
Jabatan Nama Tanda Tangan Tanggal
Pembimbing I : Ahmad Marzuki, S.Si., Ph.D . . . . . . NIP. 19680508 199702 1 001
Pembimbing II : Drs. Cari, MA., M.Sc., Ph.D . . . . . . NIP. 19610306 198503 1 002
Mengetahui
Ketua Program Studi Ilmu Fisika
Drs. Cari, MA., M.Sc., Ph.D NIP. 19610306 198503 1 002
commit to user
iii
Wawan Kurniawan
NIM. S911002003Telah Disetujui oleh Tim Penguji
Jabatan Nama Tanda Tangan Tanggal
Ketua : Prof. Ir. Ari Handono Ramelan, M.Sc., Phd . . . . . . NIP. 196102231986011001
Sekretaris : Dr. Eng Budi Purnama, S.Si., M.Si . . . . . . NIP. 197311092000031001
Anggota Penguji
1. Ahmad Marzuki, S.Si., Ph.D . . . . . . NIP. 19680508 199702 1 001
2. Drs. Cari, MA., M.Sc., Ph.D . . . . . . NIP. 19610306 198503 1 002
Surakarta, Juni 2012 Mengetahui,
Direktur Program Pascasarjana Ketua Program Studi Ilmu Fisika
Prof. Dr. Ir. Ahmad Yunus, M.S Drs. Cari, MA., M.Sc., Ph.D NIP. 19610717 198601 1 001 NIP. 19610306 198503 1 002
commit to user
iv
SURAT PERNYATAAN
Yang bertanda tangan di bawah ini, saya
Nama : Wawan Kurniawan
NIM : S911002003
Menyatakan dengan sesungguhnya, bahwa tesis berjudul : Rancang bangun prototipe spektrometer digital adalah karya saya. Hal – hal yang bukan karya saya dalam tesis tersebut ditunjukkan dalam daftar pustaka. Apabila di kemudian hari terbukti pernyataan saya tidak benar, maka saya bersedia menerima sanksi akademik berupa pencabutan tesis dan gelar yang saya peroleh dari tesis tersebut.
Surakarta, Juni 2012 Yang membuat pernyataan
Wawan Kurniawan
commit to user
v
jalan mereka yang Engkau murkai dan bukan pula jalannya orang – orang yang sesat. Semangat dari tesis ini adalah kemandirian dalam hal pembuatan perangkat eksperimen. Setelah tesis ini selesai diharapkan spektrometer digital ini dapat dikembangkan lebih fungsional dan akurat untuk melangkah ketahap penelitian lanjutan. ALLAH menciptakan cahaya dengan energi yang diskrit dan jangkauan spektrum yang sangat luas untuk memenuhi kebutuhan manusia, maha besar ALLAH terhadap semua ciptaannya.
Ucapan terimakasih dan penghargaan setinggi – tingginya saya tujukan kepada yang terhormat :
1. Ahmad Marzuki, S.Si., Ph.D yang telah memberi arahan yang bermanfaat hingga peneliti jadi orang yang lebih baik.
2. Drs. Cari, MA., M.Sc., Ph.D sebagai ketua program studi Ilmu Fisika yang telah menempa peneliti menjadi jadi diri yang lebih baik.
3. Rektor IKIP PGRI yang telah memberikan ijin dan bantuan pendanaan untuk menyelesaian studi master kepada peneliti.
4. Anak dan istriku yang membuat hidup ini lebih berwarna.
Semarang, Juni 2012
Penulis
commit to user
vi MOTTO
commit to user
vii
Kupersembahkan karya ini untuk :
Orang tua ku tercinta :
Bapak Slamet Maryadi dan ibu Sujatminah
Istriku tercinta : Diana Endah Handayani, M.Pd
Anakku tersayang : Dinar Avilliani
Tempat Kerja ku : IKIP PGRI SEMARANG
commit to user
viii ABSTRAK
Wawan Kurniawan. S911002003. 2012. “ Rancang Bangun Prototipe Spektrometer Digital ”. Pembimbing I : Ahmad Marzuki, S.Si., Ph.D. Pembimbing II : Drs. Cari, MA., M.Sc.,Ph.D. Tesis. Program Ilmu Fisika. Pascasarjana Universitas Sebelas Maret, Surakarta.
Tesis ini telah membangun sebuah prototipe spektrometer digital yang digunakan untuk mengukur panjang gelombang laser HeNe produksi Uniphase, panjang gelombang lampu LED produksi Optek Technology dan mencari hubungan pergeseran serat optik yang dilenturkan.
Proses kerja spektrometer digital ini diawali dari sumber cahaya monokromatik dan polikromatik yang dilengkungkan oleh kisi drifraksi 600 gores/mm hingga terbentuk pola interferensi cahaya yang kemudian diukur intensitas cahayanya menggunakan sensor cahaya LDR tipe NORP 12. Teknik pengukuran intensitas cahaya dilakukan dengan menggerakkan sensor cahaya tiap sudut 0,9o atau 1,8o dari sudut 0o hingga 180o. Data pengukuran berupa tegangan yang setara dengan intensitas cahaya lalu dikonversi oleh sistem antarmuka dengan resolusi 8 bit dan data ditampilkan oleh komputer dalam bentuk grafik dan disimpan dalam excel.
Laser HeNe yang digunakan dalam penelitian ini mempunyai panjang gelombang 632,80 nm dan hasil pengukuran menggunakan prototipe ini dengan pergeseran sensor 1,8o menghasilkan nilai ukur λ = (636,87 ± 0,14) nm dan pergeseran sensor 0,9o menghasilkan λ = (635,64 ± 0,42) nm. Sedangkan panjang gelombang referensi maksimum dari lampu Led adalah 480 nm dan 575 nm dan hasil pengukuran dengan sudut geser sensor 1,8o menghasilkan λ = (565,51 ± 3,48) nm dan ketika sudut pergeseran sensor 0,9o menghasilkan λ = (568,73 ± 3,96) nm. Penelitian ini juga mencatat pelenturan maksimum serat optik yang telah digores sebesar 3,4 mm dan mempunyai nilai yang linier terhadap penurunan intensitas cahaya yang keluar dari serat optik.
commit to user
ix
Digital spectrometer work was start from monochromatic and polychromatic light source which is curved by the lattice drifraksi 600 scratch / mm to form an interference pattern of light is then measured the intensity of light using LDR light sensor type NORP 12. Light intensity measurement technique is done by moving the light sensor every angle 0.9 ° or 1.8 ° of the angle 0o to 180o. Measurement data in the form of a voltage equal to the intensity of light are then converted by the system interface with a resolution of 8 bits and the data displayed by the computer and stored in the form of graphs in excel.
HeNe lasers are used in this study have a wavelength 630 nm and the results of measurements using this prototype produces measurable λ = (636,87 ± 0,14) nm with sensor shifted every angle 1.8o. When the sensor is shifted every angle 0.9o produce measurable λ = (635,64 ± 0,42) nm. While the maximum reference wavelength of LED light is 480 nm and 575 nm and the results of measurements at an angle of 1.8° shear sensor produces λ = (565,51 ± 3,48) nm and measured when the angle shift of 0.9o sensor produces λ = (568,73 ± 3,96) nm measured. The study also notes the maximum deflection of optical fiber that has been etched by 3.4 mm and has a linear value of the decrease in the intensity of light emitted from the optical fiber.
commit to user x DAFTAR ISI Halaman HALAMAN JUDUL . . . i LEMBAR PERSETUJUAN . .. . . ii
LEMBAR PENGESAHAN . .. . . . . . iii
SURAT PERNYATAAN . . . iv KATA PENGANTAR . . . v MOTTO . . . vi PERSEMBAHAN . . . .. . . vii ABSTRAK . . . viii DAFTAR ISI . . . . . . .x
DAFTAR TABEL . . . . . . xii
DAFTAR GAMBAR . . . .xiii
DAFTAR LAMPIRAN . . . . . . .xvi
BAB I PENDAHULUAN . . . . . . 1
A. Latar Belakang Masalah . . . . . . 1
B. Perumusan Masalah . . . . . . 6
C. Batasan Masalah . . . . . . 6
D. Tujuan Penelitian . . . 6
E. Manfaat Penelitian . . . .. . . 7
F. Sistematika Penelitian . . . .. . . 7
BAB II LANDASANA TEORI . . . . . . 8
A. Hukum Khirchof. . . . . . . .. . . 8
B. Sistem Sensor Cahaya. . . ... . . 10
C. Data Logging Komputer . . . . 16
D. Sistem Gerak . . . . . . . 24
E. Sistem Kontrol Lampu LED . . . 27
F. Pengembangan Data Logging Intensitas Cahaya Berbasis Komputer . . 29
BAB III METODOLOGI PENELITIAN . . . .. . . 50
A. Persiapan . . . . . . 51
commit to user
xi
B. Hasil dan Pembahasan Uji Pergerakan Motor Stepper. . . . .. . 61
C. Hasil dan Pembahasan Uji Pengukuran Panjang Gelombang Lase He-Ne. . . . . . . . . 64
D. Hasil dan Pembahasan Uji Pengukuran Panjang Gelombang Lampu LED . . . . . . .76
E. Hasil dan Pembahasan Pergeseran Serat Optik dengan Intensitas Cahaya . . . .83
BAB V SIMPULAN DAN SARAN . . . 87
A. Simpulan . . . . . . .. 87
B. Saran . . . .. . . . 88
DAFTAR PUSTAKA . . . .. . . 89
commit to user xii DAFTAR TABEL Halaman Tabel 2.1. Daftar pin pada DB-25 dan Centronics (PS = Printer Status, PC = Printer Control) . . . . . . 18
Tabel 2.2. Alamat – alamat dasar printerport. . . . . . . . . . 18
Tabel 2.3. Kode Pemilihan input analog pada IC ADC0809. . . . . . 20
Tabel 2.4. Data biner dan hexsadesimal pergerakan kekanan 4 langkah . . . 25
Tabel 2.5. Data biner dan hexsadesimal pergerakan kekiri 4 langkah . . . .25
Tabel 2.6. Data biner dan hexsadesimal pergerakan kekanan dengan sudut kecil. . . . 26
Tabel 2.7. Perkalian variabel md yang menyebabkan motor bergerak 90 derajat. . . . 36
Tabel 2.8. Data relasi dengan rangkaian Gambar 2.22. . . .37
Tabel 3.1. Alat dan bahan yang digunakan dalam membuat spektrometer digital. . . . 51
Tabel 3.2. Tabulasi data secara otomatis ke dalam excel . . . 57
Tabel 3.3. Tabulasi dua data terhadap sudut pergeserannya. . . . . . 59
Tabel 4.1. Data uji pergeseran sudut motor stepper. . . . . . .61
Tabel 4.2. Data desimal untuk menggeser motor ke kanan tiap 1,8 derajat . . . 62
Tabel 4.3. Data desimal untuk menggeser motor kekanan tiap 0,9 derajat. . . . . 63
Tabel 4.4. Nilai panjang gelombang puncak laser He-Ne data I sudut 1,8 derajat . . . 66
Tabel 4.5. Panjang gelombang tiap percobaan . . . 67
Tabel 4.6. Nilai panjang gelombang puncak laser HeNe data I sudut 0,9 derajat . . . . 72
Tabel 4.7. Tabulasi data rata – rata panjang gelombang sudut pergeseran 0,9o . . . . . .73
Tabel 4.8. Nilai panjang gelombang puncak dari lampu LED data I sudut 1,8o. . . 78
Tabel 4.9. Data panjang gelombang untuk sudut pergeseran 1,8o . . . 78
Tabel 4.10. Nilai panjang gelombang puncak dari lampu LED dan data I sudut 0,9o. . 81
Tabel 4.11. Data penjang gelombang untuk sudut pergeseran 0,9o . . . .82
commit to user
xiii
Gambar 1.5. Spektrum cahaya laser HeNe (a). Hasil difraksi celah tunggal (b). Hasil difraksi celah ganda . . . . . . .4
Gambar 1.6. Skema spektrometer digital menggunakan kisi difraksi . . . 4
Gambar 1.7. Data pergeseran dari pelenturan serat optik . . . 5
Gambar 2.1. Skema rangkaian tertutup dengan dua resistor terpasang seri dengan sumber tegangan . . . 8
Gambar 2.2. (a) Bentuk fisik LDR (b). Simbol elektronik dari LDR . . . . . . .10
Gambar 2.3. Hubungan intensitas cahaya dengan nilai hambatan dari LDR.. . . 11
Gambar 2.4. Rangkaian sensor cahaya menggunakan LDR . . . .. . . 11
Gambar 2.5. Bentuk fisik LDR dan skema rangkaian pembagi tegangan. . . 13
Gambar 2.6. Desaian rangkaian alat ukur cahaya berbasis microcontroler . . . .14
Gambar 2.7. Sistem sensor cahaya dengan prinsip pembagi tegangan . . . .14
Gambar 2.8. Hasil pengukuran intensitas cahaya . . . . . . 15
Gambar 2.9. Respon spektrum dari LDR tipe NORP 12 . . . .16
Gambar 2.10. Diagram blok dari sistem komputer . . . 17
Gambar 2.11. Pin out Db-25 dari printer port . . . .19
Gambar 2.12. Skema rangkaian antarmuka dengan buffer 74LS14 . . . 19
Gambar 2.13. Pin out dari IC ADC0808. . . . . . 20
Gambar 2.14. Rangkaian antarmuka komputer dengan IC multiplekser 74LS157. . . . 23
Gambar 2.15. Pin out Ic multiplekser 74LS157 . . . 24
Gambar 2.16. Diagram motor slangkah . . . . . . .. . . 25
Gambar 2.17. Desain dasar driver motor stepper . . . . . 26
Gambar 2.18. Pin out dan skema rangkaian dari IC ULN28003A. . . 27
commit to user
xiv
Gambar 2.20. Rangkaian driver lampu LED . . . . 28
Gambar 2.21. Desain rangkaian spektrometer. . . 30
Gambar 2.22 Rangkaian power supplay untuk rangkaian spektrometer digital . . . 31
Gambar 2.23. Sistem sensor cahaya berbasis LDR dan potensiometer. . . ..32
Gambar 2.24. Tampilan perangkat lunak spektrometer digital . . . 34
Gambar 2.25. IC Quad 2 to 1 multiplekser 74LS157 . . . .22
Gambar 3.1. Alur penelitian membuat spektrometer digital dan pengujiannya . . . 50
Gambar 3.2. Perangkat keras spektrometer digital yang sudah dirakit . . . 52
Gambar 3.3. Uji pergeseran sudut untuk motor stepper. . . .53
Gambar 3.4. Blok diagram untuk mengukur panjang gelombang cahaya . . . .54
Gambar 3.5. Setup peralatan untuk mengukur panjang gelombang laser HeNe. . . 54
Gambar 3.6. Setup peralatan pengukuran spektrum cahaya lampu LED . . . .55
Gambar 3.7. Blok diagram untuk mengukur pergeseran serat optik . . . .56
Gambar 3.8. Setup peralatan untuk mengukur pergesera dengan serat optik. . . .56
Gambar 4.1. Pengukuran intensitas laser HeNe. . . 60
Gambar 4.2. Pengukuran intensitas cahaya laser HeNe menggunakan detektor produksi Newport. . . .. . . 60
Gambar 4.3. Data I dari spektrum laser HeNe dengan pergeseran sudut 1,8o . . . .64
Gambar 4.4. Pola interferensi dan difraksi data I dengan sudut pergeseran 1,8o . . . . .66
Gambar 4.5. Analisa spektrum cahaya laser HeNe data I sudut pergeseran 1,8 o . . . . .64
Gambar 4.6. Profile laser HeNe. . . 68
Gambar 4.7. Perbandingan spektrum cahaya laser HeNe dengan sudut 1,8o . . . 69
Gambar 4.8. Data I dari spektrum laser He-Ne pergeseran sudut 0,9o . . . 70
Gambar 4.8. Pola interferensi dan difraksi data I sudut pergeseran 0,9 o . . . 67
Gambar 4.9. Analisa spektrum cahaya laser HeNe data I sudut pergeseran 1,8o . . . 71
Gambar 4.10. Analisa spot dari laser HeNe . . . .. . . 71
Gambar 4.11. Perbandingan spektrum cahaya laser HeNe dengan sudut 0,9o . . . 72
Gambar 4.12. Analisa spot dari laser HeNe . . . . . . 74
Gambar 4.13. Spektrum cahaya laser HeNe pada jarak 10 m. . . 74
Gambar 4.14. Sistem transisi atom Neon. . . .75
Gambar 4.15. Energi pump diatas energi (E) . . . 76
Gambar 4.16. Elektron menabrak atom neon hingga energi dasar meningkat . . . .76
commit to user
xv
Gambar 4.25. Data pergeseran serat optik pada sudut 95,4 o . . . .84
Gambar 4.26. Data pergeseran serat optik pada sudut 95,4 o, 108 o, 110,7 o . . . 85
Gambar 4.27. Serat optik belum menglami pembengkokan . . . .. . . .86
commit to user xvi DAFTAR LAMPIRAN Halaman
commit to user
380 nm sampai 770 nm (Pedrotti, 1993). Spektrum cahaya tampak menarik dipelajari karena dapat dirasakan oleh mata manusia secara langsung. Alat yang dapat digunakan untuk menganalisa spektrum cahaya disebut spektrometer, awal abad ke-20 energi dari spektrum cahaya tampak digunakan dalam banyak penelitian. Salah satu pemanfaatan spektrometer dibidang kedokteran adalah pengukuran spektrum darah manusia untuk mengetahui beberapa penyakit (Minkovich, dkk, 2001). Energi serapan dari unsur CO2
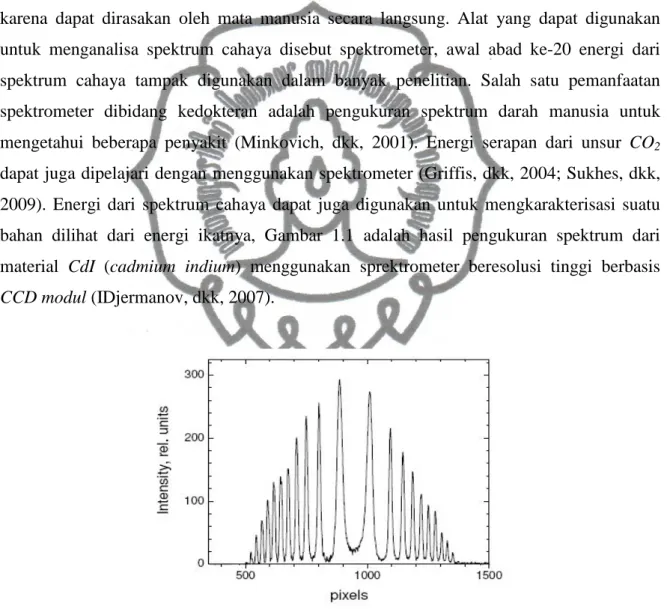
dapat juga dipelajari dengan menggunakan spektrometer (Griffis, dkk, 2004; Sukhes, dkk, 2009). Energi dari spektrum cahaya dapat juga digunakan untuk mengkarakterisasi suatu bahan dilihat dari energi ikatnya, Gambar 1.1 adalah hasil pengukuran spektrum dari material CdI (cadmium indium) menggunakan sprektrometer beresolusi tinggi berbasis
CCD modul (IDjermanov, dkk, 2007).
Gambar 1.1. Hasil spektrum Cd I (cadmium indium) dengan menggunakan CCD modul (IDjermanov, dkk, 2007).
Salah satu fungsi spektrometer adalah pengukuran panjang gelombang dari cahaya sumber. Ada beberapa cara sederhana mengukur panjang gelombang cahaya sumber dengan menggunakan pola interferensi dari proses pelenturan cahaya atau difraksi. Tahun
commit to user
1802 Thomas Young mengukur panjang gelombang berkas cahaya monokromatik dengan menggunakan celah ganda, Gambar 1.2 adalah skema dari eksperimen tersebut.
Gambar 1.2. Skema eksperimen celah ganda oleh Young (Pedrotti, 1993).
Eksperimen Young menggunakan cahaya monokromatik yang dilewatkan pada dua celah sempit dengan lebar celah lebih kecil dari panjang gelombang cahayanya sehingga terjadi proses pelenturan cahaya yang memunculkan fenomena gelap terang yang dikenal dengan pola interferensi pada dinding layar seperti terlihat pada Gambar 1.3.
Gambar 1.3. Pola interferensi pada dinding layar (Pedrotti, 1993).
Terbentuknya pola distruktif dan konstruktif pada dinding disebabkan dari dua celah tersebut (S1 dan S2) berperilaku seperti sumber cahaya baru yang mempunyai fase sama
commit to user
Gambar 1.4. Proses terbentuknya pola interferensi cahaya (Pedrotti, 1993).
Pola konstruktif pada titik P dilayar yang ditunjukkan pada Gambar 1.2 mempunyai pendekatan persamaan 1.1 (Pedroti, 1993) :
S2P – S1P = Δ = m λ = a sin θ (1.1)
Sedangkan pola destruktif didekati dengan persamaan 1.2 (Pedroti, 1993) :
Δ = (m+ 1/2) λ = a sin θ (1.2)
Teknik lain mengukur panjang gelombang cahaya yaitu dengan menggunakan metode difraksi Frounhofer celah tunggal yang menghasilkan pengukuran panjang gelombang 658 nm dari sebuah laser dioda warna merah (Sofjan, dkk, 2003). Tetapi metode ini gagal dalam mengukur berkas cahaya yang tidak monokromatik dan berintensitas rendah. Penambahan celah difraksi menjadi 2, 3 sampai 8 celah pada percobaan ini ternyata hanya menambah ketajaman dari puncak konstruktif hingga memperolah pengukuran panjang gelombang Laser HeNe sebesar 634,4 nm (Heri, dkk, 2005). Pola interferensi yang terjadi pada pelenturan satu dan dua celah ditunjukkan secara visual pada Gambar 1.5.
commit to user
(a) (b)
Gambar 1.5. Spektrum cahaya laser HeNe
(a). Hasil difraksi celah tunggal (Sofjan, dkk, 2003). (b). Hasil difraksi celah ganda (Heri, 2005).
Melihat begitu luasnya pemanfaatan spektrometer ini dan begitu mahalnya seperangkat spektrometer digital berbasis komputer contohnya UV-Vis maka peneliti ingin memulai membangun dari awal spektrometer digital yang dapat digunakan untuk mengukur panjang gelombang cahaya laser HeNe, lampu LED putih dan mencari hubungan pelenturan serat optik terhadap intensitas cahayanya. Pengukuran panjang gelombang laser HeNe produksi Uniphase dengan panjang gelombang referensi 632,8 nm dan sebuah lampu LED putih dengan cara melewatkan cahaya sumber pada kisi difraksi yang mempunyai 600gores/mm dan tidak menggunakan layar untuk mengukur pola interferensinya tetapi sensor cahaya yang akan diputar hingga mencapai setengah lingkaran untuk mengukur intensitas cahayanya. Gambar 1.6 adalah skema kerja spektrometer digital yang akan dibangun dalam percobaan ini mengggunakan kisi difraksi transparan produksi Pudak Scientifik Bandung.
Gambar 1.6. Skema spektrometer digital menggunakan kisi difraksi.
Penggunaan komputer dalam percobaan ini digunakan sebagai pengontrol untuk menggerakkan sensor cahaya tiap beberapa sudut lalu mengukur intensitas cahaya hingga mendapatkan data yang siap disimpan dan ditampilkan dalam bentuk grafik dan list. Permasalahan yang akan diselesaikan dalam penelitian ini adalah pembuatan perangkat keras dan perangkat lunak agar komputer dapat mengontrol pergerakan sensor, lampu LED
commit to user
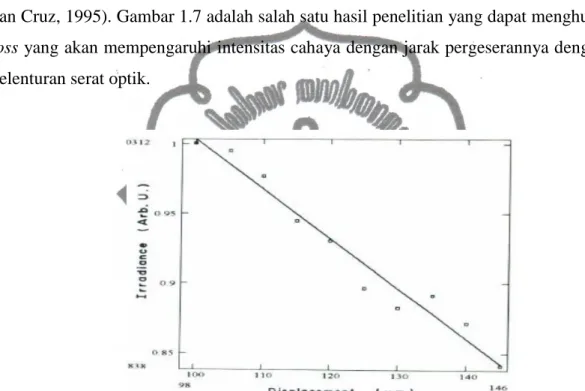
dan Cruz, 1995). Gambar 1.7 adalah salah satu hasil penelitian yang dapat menghubungkan
loss yang akan mempengaruhi intensitas cahayadengan jarak pergeserannya dengan enam pelenturan serat optik.
Gambar 1.7. Data pergeseran dari pelenturan serat optik (Rosa dan Cruz, 1995).
Penelitian tambahan untuk mencari hubungan linier pergeseran dengan intensitas cahaya ini diperlukan untuk membuktikan bahwa spektrometer yang akan dibangun ini mempunyai keunggulan hingga dapat dikembangkan lebih baik lagi secara mandiri.
commit to user
B. PERUMUSAN MASALAH
Penelitian ini akan membuat prototipe spektrometer digital, oleh karena itu masalah yang akan dipecahakan dalam penelitian ini adalah
1. Bagaimana membuat perangkat keras dan perangkat lunak untuk dapat membaca data intensitas cahaya yang dapat dikontrol, ditampilkan dalam bentuk grafik dan tersimpan dalam komputer.
2. Bagaimana membuat perangkat keras dan perangkat lunak untuk menggerakkan sensor cahaya dari 0o sampai 180o dan tiap pergerakannya komputer mampu menyimpan data intensitas cahayanya.
3. Bagaimana membuat sistem uji agar spektrometer digital ini dapat digunakan untuk mengukur panjang gelombang laser HeNe, lampu LED dan mencari hubungan linier antara pergeseran serat optik dengan intensitas cahaya yang keluar dari serat optik karena pelenturan mekanik.
C. BATASAN MASALAH
Batasan – batasan dalam penelitian ini adalah sebagai berikut :
1. Pembuatan perangkat lunak mengunakan komputer PIII dengan sistem operasi window 98SE dengan program dasar Delphi 5.0 yang di sisipi oleh program Inpout 32.dll dan assembly.
2. Sistem kalibrasi sensor cahaya yang digunakan dalam penelitian ini menggunakan sensor cahaya produksi Newport.
3. Penelitian ini menggunakan motor stepper recondition karena itu kehalusan dan ketelitian dari pergeseran sudut tidak dapat diandalkan.
D. TUJUAN PENELITIAN
Penelitian ini bertujuan sebagai berikut :
1. Membuat spektrometer digital agar dapat dikembangkan secara mandiri.
2. Memanfaatkan spektrometer yang telah dibuat untuk mengukur panjang gelombang laser HeNe dan lampu LED warna putih.
commit to user
yang dapat kita ganti sumber cahayanya.
2. Penelitian ini juga membuat alat ukur pergeseran dari serat optik yang berikutnya dapat kita manfaantkan sebagai sensor getar.
3. Kemudahan pencatatan data pengukuran cahaya secara terus – menerus karena penggunaan komputer.
4. Kemudahan mentabulasi data pengukuran yang telah ditangani oleh komputer kedalam excel.
F. SISTEMATIKA PENULISAN
Tesis ini adalah bentuk laporan dari kegiatan penelitian yang telah dilakukan, oleh karena itu tulisan tesis ini dibagi dalam beberapa bagian yang diberi nama BAB. Dalam tulisan ini kami membagi dalam lima bab yang saling berurutan. BAB I berisi tentang latar belakang masalah dari penelitian ini, berikutnya rumusan masalah, batasan masalah, tujuan, manfaat dan sistematika penelitian yang dilakukan. BAB II berisi landasan teori yang digunakan dalam penelitian ini, dalam landasan teori kami menuliskan teori tentang laser He-Ne, serat optik, lampu LED, pelenturan cahaya, aturan pembagi tegangan, sensor cahaya, analog digital konverter, teori multiplekser, printerport dan motor strpper atau motor langkah. BAB III berisi metodologi penelitian yang digunakan untuk menyelesaikan masalah dalam penelitian ini, adapun langkah pertama adalah persiapaan, pembuatan perangkat keras, pembuatan sistem sensor cahaya, pembuatan perangkat lunak, pembuatan perangkat uji optik, uji optik, analisa dan simpulan. BAB IV berisi hasil dan gambar foto dari penelitian ini, analisa data dan pembahasan. Didalam pembahasan kami membagi dua bidang yaitu pembahasan dari cara pandang optik dan dari cara pandang elektronika. BAB V kami membuat simpulan dan memberi saran untuk peneliti – peneliti yang akan meneruskan penelitian ini.
commit to user
BAB II
LANDASAN TEORI
Spektrometer digital yang dibangun dalam penelitian ini mempunyai dua bagian utama. Pertama adalah perangkat keras yang terdiri dari rangkaian sistem sensor cahaya yang dapat mengkonversi intensitas cahaya menjadi data dalam bentuk tegangan (data analog), berikutnya rangkaian data logging yang dapat mengkonversi data analog menjadi data digital hingga dapat dibaca dan disimpan oleh komputer, rangkaian berikutnya adalah sistem gerak untuk mengontrol gerakan sensor cahaya dan terakhir rangkaian pengontrol lampu LED (light emitted diode) sebagai sumber cahaya. Bagian kedua adalah perangkat lunak yang berisi set instruksi untuk mengontrol nyala lampu LED, mengontrol pergerakan sensor cahaya, mengontrol proses konversi data lalu menyimpan dan menampilkannya di komputer.
A. Hukum Khirchoff
Hukum khirchof terbagi menjadi dua bagian yaitu hukum khirchof tentang tegangan atau biasa disebut dengan KVL (Khirchoff Voltage Law) dan hukum khirchof tentang arus yang disebut dengan KCL (Khirchoff Current Law) (Wasif, 2009). Dedikasi dari hukum ini adalah untuk menganalisa rangkaian tertutup dalam mencari tegangan dan arus yang mengalir ditiap komponen. Didalam KVL ada aturan pembagi tegangan yang disebut dengan VDR (Voltage Divider Rule) untuk menghitung besarnya tegangan jepit diantara komponen resistor yang terpasang seri dengan sumber tegangan didalam rangkaian tertutup seperti terlihat pada Gambar 2.1.
Gambar 2.1. Skema rangkaian tertutup dengan dua resistor terpasang seri dengan sumber tegangan (Wasif, 2009).
commit to user
Vs adalah tegangan sumber, R1 dan R2 adalah resistor, V1 adalah tegangan jepit pada R1
dan V2 adalah tegangan jepit pada R2. Jika kita memberikan harga besaran pada Vs sebesar
5V dan R1 = R2= 10KΩ maka besarnya V2 dapat kita hitung sebesar :
V V V x K K K V V x R R R V s 5 , 2 5 10 10 10 2 2 1 2 2 2 = W + W W = + =
Sekarang jika R1berubah menjadi 1KΩ maka besarnya V2 berubah menjadi sebesar :
V V V x K K K V V x R R R V s 5 , 4 5 1 10 10 2 2 1 2 2 2 = W + W W = + =
Perhitungan diatas memperlihatkan jika besarnya R1 berubah maka akan menghasilkan
perubahan besarnya V2, kondisi ini akan digunakan untuk membuat sistem sensor cahaya
commit to user
B. Sistem Sensor Cahaya
Sistem sensor adalah sekumpulan desain rangkaian yang dapat digunakan untuk mengkonversi besaran fisis menjadi besaran analog setara sesuai parameter elektriknya. Data dapat berupa suhu, regangan, pergeseran, aliran, tekanan, tegangan, hambatan, daya dan parameter – parameter dengan jangkauan luas yang lainnya (Sumon, dkk, 2006). Sistem sensor cahaya adalah rangkaian yang mengandung komponen elektronik yang mampu mengubah besaran fisis intensitas cahaya menjadi besaran tegangan yang setara. Dalam dunia elektronik kita mengenal beberapa jenis sensor cahaya seperti photodioda,
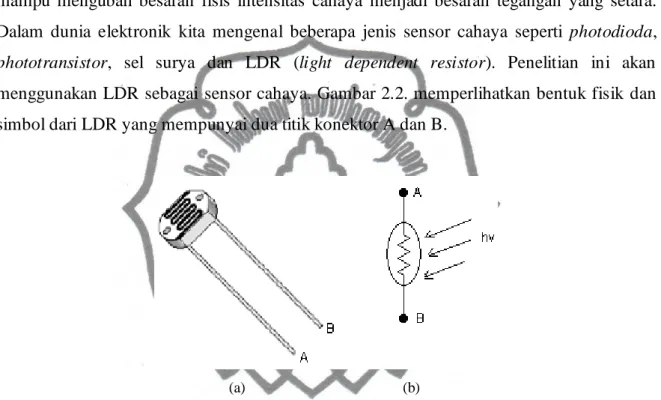
phototransistor, sel surya dan LDR (light dependent resistor). Penelitian ini akan menggunakan LDR sebagai sensor cahaya. Gambar 2.2. memperlihatkan bentuk fisik dan simbol dari LDR yang mempunyai dua titik konektor A dan B.
(a) (b)
Gambar 2.2. (a) Bentuk fisik LDR, (b) Simbol elektronik dari LDR
Sistem kerja dari LDR sama dengan sistem kerja dari resistor biasa yaitu sama – sama menghambat arus listrik. Perbedaan yang sangat dasar adalah resistor biasa mempunyai harga hambatan yang tetap untuk satu harga tetapi LDR mempunyai harga hambatan yang berubah sesuai besarnya intensitas cahaya yang diterimanya. Tipe LDR yang digunakan dalam penelitian ini adalah NORP 12 yang mempunyai karakteristik hubungan besarnya hambatan dengan intensitas cahaya diperlihatkan pada Gambar 2.3 berikut ini.
commit to user
Gambar 2.3. Hubungan intensitas cahaya dengan nilai hambatan dari LDR (Data Sheet NORP 12, 1997).
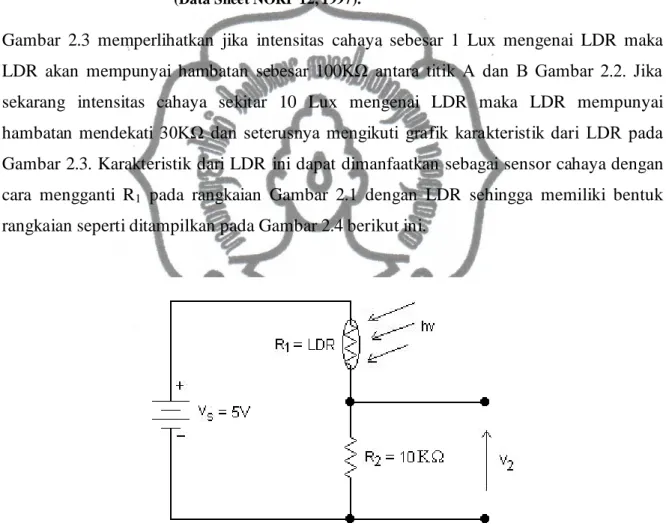
Gambar 2.3 memperlihatkan jika intensitas cahaya sebesar 1 Lux mengenai LDR maka LDR akan mempunyai hambatan sebesar 100KΩ antara titik A dan B Gambar 2.2. Jika sekarang intensitas cahaya sekitar 10 Lux mengenai LDR maka LDR mempunyai hambatan mendekati 30KΩ dan seterusnya mengikuti grafik karakteristik dari LDR pada Gambar 2.3. Karakteristik dari LDR ini dapat dimanfaatkan sebagai sensor cahaya dengan cara mengganti R1 pada rangkaian Gambar 2.1 dengan LDR sehingga memiliki bentuk
rangkaian seperti ditampilkan pada Gambar 2.4 berikut ini.
Gambar 2.4. Rangkaian sistem sensor cahaya menggungakan LDR.
Penggantian R1 dengan LDR tipe NORP 12 seperti yang diperlihatkan pada Gambar 2.4
menyebabkan tegangan keluaran V2 mempunyai hubungan dengan besarnya intensitas
cahaya yang diterima oleh LDR. Hubungan besarnya hambatan R1 dengan besarnya
tegangan V2 diperlihatkan pada persamaan 2.2 dimana cahaya dengan intensitas 1 Lux
mengenai LDR maka besarnya hambatan LDR menjadi 100 KΩ dan tegangan V2 menjadi
commit to user V V V x K K K V xV R R R V s 45 , 0 5 100 10 10 2 2 1 2 2 2 = W + W W = + =
Ketika intensitas cahaya 10 Lux mengenai LDR maka hambatan LDR menjadi 30 KΩ dan besarnya tegangan V2 menjadi sebesar :
V V V x K K K V xV R R R V s 25 , 1 5 30 10 10 2 2 1 2 2 2 = W + W W = + =
Terlihat dari dua perhitungan diatas bahwa intensitas cahaya yang mengenai LDR mempunyai nilai kesetaraan dengan tegangan V2 sesuai dengan grafik karakteristik dari
LDR Gambar 2.3 dengan besarnya tegangan keluaran dari V2 yang dapat juga kita beri
nama Vo mengikuti aturan pembagi tegangan dari hukum khirchoff. Besarnya harga dari R2
dalam penelitian ini sebesar 10 KΩ dan menggunakan resistor variabel atau sering disebut potensiometer untuk kepentingan kalibrasi. Harga R2 yang dipasang ditiap rangkaian sistem
sensor cayaha tidak mempunyai kebakuan tergantung dari fungsi rangkaiannya. Penelitian yang dilakukan oleh Derci dan Daniel tahun 2006 menggunakan tegangan sumber +9V dan R2sebesar 4,7 KΩ. Ada beberapa jenis rangkaian yang pernah digunakan dalam penelitian
lain seperti pada Gambar 2.5 yang memperlihatkan sistem sensor cahaya dengan susunan LDR terbalik dengan sistem yang digunakan dalam penelitian ini.
commit to user
Gambar 2.5. Bentuk fisik LDR dan skema rangkaian pembagi tegangan (Suyamto, dkk, 2008).
Gambar 2.5 memperlihatkan jika intensitas cahaya 1 Lux mengenai LDR maka LDR akan mempunyai hambatan 100 KΩ sehingga besarnya tegangan V2 sebesar :
V V V x K K K V Vcc x R R R V LDR LDR 5 , 4 5 10 100 100 2 2 1 2 = W + W W = + =
Ketika intensitas cahaya yang mengenai LDR menjadi 10 Lux dan hambatan LDR menjadi 30 KΩ maka hasil perhitungan memperoleh V2 sebesar 3,7 V hal ini mengindikasikan
bahwa ketika intensitas cahaya rendah justru rangkaian Gambar 2.5 menghasilkan tegangan V2 yang tinggi dan ketika intensitas cahaya tinggi menghasilkan tegangan keluaran V2
rendah hal ini terbalik dengan sistem rangkaian yang digunakan dipenelitian ini. Referensi sistem sensor yang digunakan dalam penelitian ini diperlihatkan pada Gambar 2.6 yang dilakukan oleh Goswami tahun 2009.
commit to user
Gambar 2.6. Desain rangkaian alat ukur cahaya berbasis mikrokontroler (Goswami, dkk, 2009).
Sensor cahaya yang digunakan pada rangkaian Gambar 2.6 adalah LDR yang dirangkai menggunakan prinsip pembagi tegangan dengan resistor R2 sebesar 10 KΩ terhadap
tegangan sumber +5 V. Gambar 2.7 memperlihat rangkaian sistem sensor cahaya yang diambil dari rangkaian Gambar 2.6.
Gambar 2.7. Sistem sensor cahaya dengan prinsip pembagi tegangan (Goswami, dkk, 2009).
Sistem sensor cahaya yang digunakan dalam Gambar 2.7 sama dengan sistem sensor cahaya yang peneliti gunakan tapi tanpa menambah komponen kapasitor. Komponen aktif yang digunakan dalam Gambar 2.6 adalah IC ADC0809 dan
commit to user
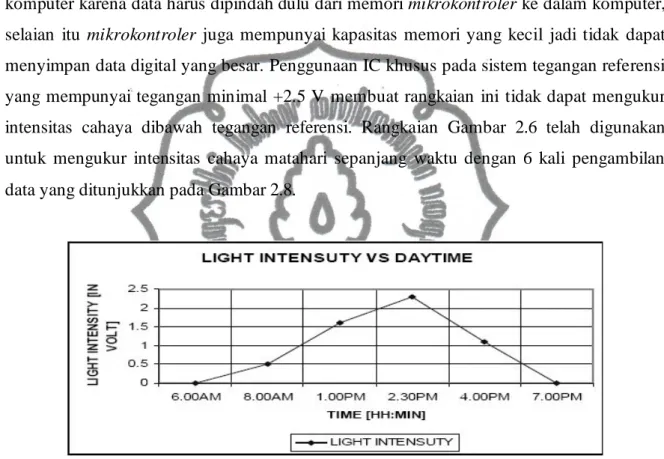
selaian itu mikrokontroler juga mempunyai kapasitas memori yang kecil jadi tidak dapat menyimpan data digital yang besar. Penggunaan IC khusus pada sistem tegangan referensi yang mempunyai tegangan minimal +2.5 V membuat rangkaian ini tidak dapat mengukur intensitas cahaya dibawah tegangan referensi. Rangkaian Gambar 2.6 telah digunakan untuk mengukur intensitas cahaya matahari sepanjang waktu dengan 6 kali pengambilan data yang ditunjukkan pada Gambar 2.8.
Gambar 2.8. Hasil pengukuran intensitas cahaya (Goswami, dkk, 2009).
Gambar 2.8 memperlihatkan di siang hari intensitas cahaya meningkat yang menandakan sistem sensor mengggunakan LDR yang terpasang diatas dapat digunakan dalam penelitian ini karena sesuai logika intensitas cahaya meningkat harus diikuti dengan tegangan keluaran yang meningkat pula. Data analog dari sistem sensor cahaya berikutnya akan menjadi masukan untuk sistem rangkaian data logging sebelum masuk ke komputer. Pemilihan LDR NOPR 12 ini didasari dari harga yang sangat murah dan spektrum cahaya yang mampu direspon oleh LDR tipe ini. Gambar 2.9 adalah grafik karakteriktik dari LDR tipe NORP 12 yang mempunyai spektrum yang cukup luas didaerah cahaya tampak. Hal ini karena dalam penelitian ini akan digunakan sumber cahaya laser HeNe dengan panjang
commit to user
gelombang 632,8 nm atau warna merah dan lampu LED warna putih yang keduanya ada didaerah cahaya tampak.
Gambar 2.9. Respon spektrum dari LDR tipe NOPR 12 (Data Sheet NORP 12, 1997).
C. Data Logging Komputer
Sistem komputer bekerja dengan menggunakan komponen – komponen digital yang diberi nama IC (Integreted Circuit). Komponen digital hanya mampu mengolah data digital, satuan terkecil dari data digital adalah bit. Data digital dalam komputer hanya mengenal dua bilangan dengan simbol ’0’ yang dikenal dengan low dan simbol ’1’ yang disebut dengan high (Roger, 1994). Sistem bilangan dengan dua simbol ini biasanya disebut dengan bilangan basis 2 atau lebih populer dengan sebutan biner. Sistem sensor yang digunakan dalam penelitian ini mempunyai keluaran data dalam bentuk tegangan, oleh karena itu komputer dapat membaca data intensitas cahaya jika keluaran sensor cahaya harus dikonversi menjadi data digital yang setara.
Data logging adalah dasar dari sebuah aplikasi pengukuran dan penyimpanan hasil ukur besaran fisis sesuai parameter elektik dari sensor tiap waktu atau parameter lainnya (Sumon, dkk, 2006). Isi dari data logging adalah rangkaian elektronik yang menghubungkan antara sensor dan mikroprosesor yang biasa disebut dengan istilah rangkaian antarmuka komputer. Komputer pada era modern memegang peranan penting dalam perkembangan sains dan teknologi. Mikroprosesor adalah elemen kontrol pada sistem komputer yang disebut sebagai CPU (central processing unit). Memori dan I/O
commit to user
Gambar 2.10. Diagram blok dari sistem komputer (Brey, 2002).
Gambar 2.10 memperlihatkan posisi antara printerport, keybord, RAM dan ROM. Akses data digital dapat dilakukan untuk mengontrol sistem I/O lewat perangkat lunak. Sedangkan tabel 2.1 memperlihatkan fungsi masing - masing pin out dari printerport.
commit to user
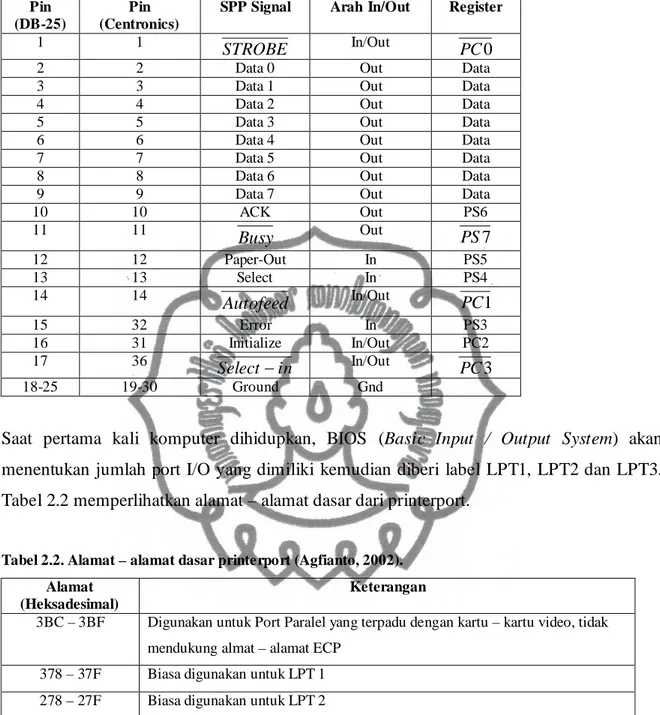
Tabel 2.1. Daftar pin pada DB-25 dan Centronics (PS = Printer Status, PC = Printer Control) (Agfianto, 2002).
Pin (DB-25)
Pin (Centronics)
SPP Signal Arah In/Out Register
1 1 STROBE In/Out PC0
2 2 Data 0 Out Data
3 3 Data 1 Out Data
4 4 Data 2 Out Data
5 5 Data 3 Out Data
6 6 Data 4 Out Data
7 7 Data 5 Out Data
8 8 Data 6 Out Data
9 9 Data 7 Out Data
10 10 ACK Out PS6 11 11 Busy Out PS7 12 12 Paper-Out In PS5 13 13 Select In PS4 14 14 Autofeed In/Out PC1 15 32 Error In PS3 16 31 Initialize In/Out PC2 17 36 Select-in In/Out PC3 18-25 19-30 Ground Gnd
Saat pertama kali komputer dihidupkan, BIOS (Basic Input / Output System) akan menentukan jumlah port I/O yang dimiliki kemudian diberi label LPT1, LPT2 dan LPT3. Tabel 2.2 memperlihatkan alamat – alamat dasar dari printerport.
Tabel 2.2. Alamat – alamat dasar printerport (Agfianto, 2002). Alamat
(Heksadesimal)
Keterangan
3BC – 3BF Digunakan untuk Port Paralel yang terpadu dengan kartu – kartu video, tidak mendukung almat – alamat ECP
378 – 37F Biasa digunakan untuk LPT 1
278 – 27F Biasa digunakan untuk LPT 2
Sedangkan Gambar 2.11 memperlihatkan pin out printerport yang terdiri dari 8 bit port data (D0 sampai D7), 4 bit port kontrol (C0 sampai C3) dan 5 bit port status (S3 sampai D7).
commit to user
Pin 18 hingga pin 25 pada konektor Db-25 didedikasikan untuk ground (0 V) jadi lebih baik kalau semua pin tersebut dijadikan satu agar sistem ground lebih kuat. Gambar 2.12 adalah salah satu desain rangkaian yang memanfaatkan konektor printer port untuk memasukkan data digital dari IC ADC0809 kedalam komputer (Axelson, 1996; Bumgarner, 1998).
Gambar 2.12. Skema rangkaian antarmuka komputer dengan buffer 74LS244 (Bumgarner, 1998).
commit to user
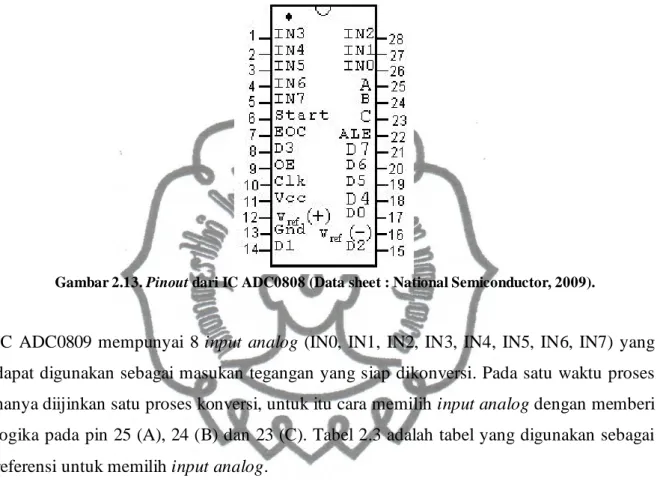
Personal komputer yang memiliki kompatibilitas dengan IBM mempunyai fasilitas parallel port untuk komunikasi data. Komponen aktif dari rangkaian pada Gambar 2.12 adalah IC ADC0809 produksi National Semiconductor sedangkan Gambar 2.13 adalah keterangan fungsi dari masing – masing pin out dari IC ADC0809.
Gambar 2.13. Pinout dari IC ADC0808 (Data sheet : National Semiconductor, 2009).
IC ADC0809 mempunyai 8 input analog (IN0, IN1, IN2, IN3, IN4, IN5, IN6, IN7) yang dapat digunakan sebagai masukan tegangan yang siap dikonversi. Pada satu waktu proses hanya diijinkan satu proses konversi, untuk itu cara memilih input analog dengan memberi logika pada pin 25 (A), 24 (B) dan 23 (C). Tabel 2.3 adalah tabel yang digunakan sebagai referensi untuk memilih input analog.
Tabel 2.3. Kode pemilihan input analog pada IC ADC0809 C B A Kode (Hexsadesimal) Alamat 0 0 0 00 IN0 0 0 1 01 IN1 0 1 0 02 IN2 0 1 1 03 IN3 1 0 0 04 IN4 1 0 1 05 IN5 1 1 0 06 IN6 1 1 1 07 IN7
Untuk memulai proses konversi langkah pertama adalah mengunci input analog yang sebelumnya dipilih dengan cara pin 6 (Start) dan pin 22 (ALE) dijadikan satu dan diberi logika 0 – 1 – 0. Proses konversi akan berhenti jika pin 7 (EOC) memberi data logika 0 - 1
commit to user
masing – masing bit data mempunyai sistem latch buffer yang ketika data konversi telah selesai maka pin 9 (OE) harus diberi logika 0 – 1 agar data dapat dibaca oleh komputer. IC ADC0809 ini mempunyai jangkauan kerja pada frekuensi 10 KHz sampai 1280 KHz dan mempunyai level logika TTL (transistor – transistor logic) sehingga dapat secara langsung dikoneksikan dengan sistem microprosesor.
Rangkaian Gambar 2.12 menggunakan tegangan referensi untuk ADC0809 sebesar (+5 V) terhadap ground (0 V) sehingga mempunyai rentang tegangan konversi antara 0 V sampai +5 V. IC ADC ini menggunakan Clock yang dibangun dari rangkaian RC dan
Schmitt trigger inverter (IC 74HTC14) dengan resistor 1 KΩ dan kapasitor 0,001 uF yang mampu menghasilkan detak 700 KHz yang masuk dalam daerah kerja ADC0809. 8 bit output data dari ADC0809 pada rangkaian Gambar 2.12 semuanya melewati IC buffer
74LS244 yang difungsikan sebagai memultiplek 8 bit data digital untuk masuk ke dalam 4 bit port status (S3, S4, S5 dan S7). Pin EOC (end of converter) masuk ke komputer lewat port status S6 untuk memberi informasi ke pada komputer akhir proses konversi. Register data D4 digunakan untuk memilih low nibble (DB0, DB1, DB2, DB3) dan high nibble
(DB4, DB5, DB6, DB7) dari IC buffer 74244. Cara memilih low nibble dari IC 74LS244 adalah dengan memberi logika low (‘0’) pada pin D4 dan logika high (‘1’) untuk memilih
high nibble. Register data pada bit D0, D1 dan D2 dikoneksikan ke buffer untuk memilih alamat input (IN0, IN1, IN2, IN3, IN4, IN5, IN6, IN7) dan register data D3 juga dikoneksikan ke buffer untuk memulai konversi dengan mengkoneksikan antara pin START dan ALE (address latch enable). Untuk memulai konversi register D3 diberi logika 0 – 1 – 0 untuk mengunci alamat pin yang akan dikonversi dan sekaligus memulai proses konversi besaran analog yang berupa tegangan menjadi data digital setara 8 bit.
Proses kontrol dan pembacaan data pada rangkaian Gambar 2.12 dilakukan oleh komputer lewat konektor Db-25 sesuai dengan intruksi pada list program yang ditulis dan dieksekusi berbantuan program QuickBasic (QBasic) dengan memanfaatkan prosedur INP
commit to user
dan OUT untuk melempar dan membaca data digital. Penggunaan bahasa pemrograman Visual Basic juga dapat digunakan tapi harus ditambah dengan instruksi dari Dynamic Link Library. Berikut ini set intruksi untuk proses konversi dan pembacaan data hasil konversi oleh IC ADC0809 (Bumgarner, 1998).
1. Tulis data pada D0, D1, D2 untuk memilih alamat kanal input dengan data (0h). 2. Tulis alamat input ditambah START dengan data (8h)
3. Tulis alamat dengan START untuk memulai proses konversi (0h). 4. Baca data pada kanal alamat ditambah bit 7 (S7*) yang dibalik.
5. Test bit 6 (40h) pada low nibble, jika ‘0’ maka ulangi langkah 4 jika yang lain maka konversi telah komplit dan teruskan langkah 6.
6. Tulis alamat kanal ditambah untuk bit yang digunakan untuk memilih high nibble
dengan data (10h).
7. Baca data pada alamat kanal ditambah bit 7 (S7*) sebagai high nibble. 8. Susun byte input dari low nibble dan high nibble sebagai data.
Rangkaian Gambar 2.12 selanjutnya diuji untuk mengukur tegangan dari potensiometer 1 KΩ dengan power yang didapat dari baterai isi ulang NiCad 1.2 V sebesar tegangan 4.8 V.
Kelemahan dari rangkaian Gambar 2.12 adalah tegangan yang dapat dikonversi tidak dapat dirubah lagi dengan batasan 0 V sampai +5 V dengan tegangan terkecil yang mampu terbaca adalah 19.6 mV. Kelemahan lain adalah penggunaan IC buffer 74LS244 yang digunakan sebagai multiplekser, sedangkan jenis IC multiplekser sendiri sudah tersedia sehingga buffer yang digunakan ini output low nibble (DB0 – DB3) harus disambung sendiri diluar rangkaian dengan high nibble (DB4 – DB7) yang menyebabkan ketidak efisienan koneksi dalam desain rangkaian, padahal didalam 8 bit output ADC0809 sudah tersedia lacth buffer.
Penelitian lain untuk mengatasi ketidak efisienan penggunaan buffer IC 74LS244 telah dilakukan oleh Sumon. S, dkk pada tahun 2006 dengan mengganti IC buffer dengan IC 74LS157 sebagai multiplekser 4 bit seperti yang terlihat pada Gambar 2.14.
commit to user
Gambar 2.14. Rangkaian antarmuka komputer dengan IC multiplekser 74LS157 (Sumon, 2006).
Rangakain Gambar 2.14 mempunyai fungsi yang sama dengan rangkaian Gambar 2.12 yaitu mengkonversi besaran analog berupa tegangan keluaran dari sensor menjadi data digital 8 bit. Perbedaan dari kedua rangakaian diatas hanya pada fasilitas jumlah masukan analog yang pada rangkaian Gambar 2.12 berjumlah 8 input analog dan pada rangkaian Gambar 2.14 terdapat 22 input analog. IC 74LS157 adalah IC yang memang didedikasikan sebagai multiplekser 4 bit. Perangkat lunak yang mengontrol rangkaian Gambar 2.14 menggunakan Turbo C++ (Sumon, 2006 ) dengan set intruksi sebagai berikut.
1. Pilih kanal masukan dengan memberi logika high atau low pada pin control (C0). 2. Aktifkan ADC dengan memberi data 0-1-0 pada pin (C2).
3. Tunggu sampai proses konversi selesai. 4. Baca data pada bus data.
5. Beri logika high (’1’) pada pin (C1*) untuk memilih high nibble data.
6. Gabungkan kedua data.
7. Setarakan data digital menjadi data tegangan. 8. Konversikan data sesuai dengan besaran.
9. Simpan data sesuai waktu untuk ditampilkan ke display. 10.Tampilkan data pada format tabulasi atau grafik.
commit to user
IC multiplekser 74LS157 adalah komponen jembatan antara port printer yang hanya mempunyai 5 bit status sebagai masukan sedangkan keluaran IC ADC0809 mempunyai 8 bit data. Gambar 2.15 adalah pin out IC 74LS157 yang mempunyai 8 bit input dan 4 bit output.
Gambar 2.15. Pin out IC multiplexer 74LS157 (Agfianto, 2002).
Proses aliran data 8 bit dari ADC0809 dimulai dengan memberi logika low atau ‘0’ pada pin inisialisasi (A*) berikutnya data D0, D1, D2 dam D3 dapat dibaca di pin 1Y, 2Y, 3Y dan 4Y. Berikutnya pin inisialisasi diberi logika high atau ‘1’ sehingga data B7, B6, B5 dan B4 siap dibaca di pin 1Y, 2Y, 3Y dan 4Y, tentu saja pin G* harus pada posisi low atau ‘0’.
D. Sistem Gerak
Motor adalah salah satu komponen elektronik yang berorientasi pada gerak. Jenis motor dalam dunia elektronik dibagi menjadi dua yaitu motor kontinue dikenal dengan sebutan motor DC (direct current) dan motor langkah biasa disebut motor stepper. Kedua jenis motor ini dapat diatur perputarannya, pengaturan pergerakan pada motor DC dengan cara pulsa modulasi sedangkan motor langkah pergerakan didasari oleh data digital. Motor langkah dapat dibagi menjadi beberapa jenis dilihat dari fase gerakannya yaitu dua fase, tiga fase empat fase dan lain sebagainya. Diagram motor langkah empat fase dapat dilihat pada Gambar 2.16.
commit to user
Gambar 2.16. Diagram motor langkah (Agfianto, 2002).
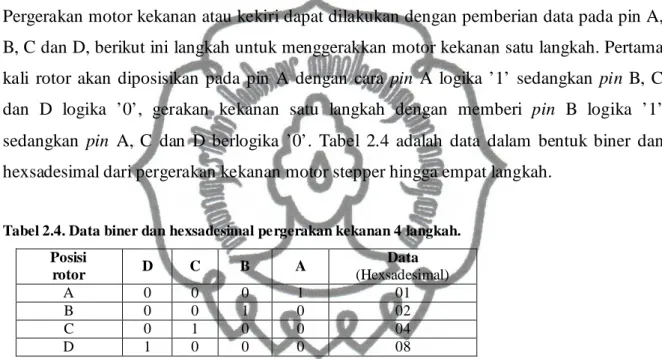
Pergerakan motor kekanan atau kekiri dapat dilakukan dengan pemberian data pada pin A, B, C dan D, berikut ini langkah untuk menggerakkan motor kekanan satu langkah. Pertama kali rotor akan diposisikan pada pin A dengan cara pin A logika ’1’ sedangkan pin B, C dan D logika ’0’, gerakan kekanan satu langkah dengan memberi pin B logika ’1’ sedangkan pin A, C dan D berlogika ’0’. Tabel 2.4 adalah data dalam bentuk biner dan hexsadesimal dari pergerakan kekanan motor stepper hingga empat langkah.
Tabel 2.4. Data biner dan hexsadesimal pergerakan kekanan 4 langkah. Posisi rotor D C B A Data (Hexsadesimal) A 0 0 0 1 01 B 0 0 1 0 02 C 0 1 0 0 04 D 1 0 0 0 08
Pergerakan motor kekanan dengan pergerakan motor kekiri mempunyai prinsip yang sama tetapi data yang diberikan ke motor akan berbeda. Tabel 2.5 adalah data biner dan hexsadesimal untuk menggerakkan motor kekiri.
Tabel 2.5. Data biner dan hexsadesimal pergerakan kekanan 4 langkah. Posisi rotor D C B A Data (Hexsadesimal) D 1 0 0 0 08 C 0 1 0 0 04 B 0 0 1 0 02 A 0 0 0 1 01
Pergerakan dengan sudut putar lebih kecil dapat juga dilakukan dengan memberi logika kedua pin A dan B yang artinya rotor akan berada ditengahnya, sehingga dari ke-4 fase motor stepper dapat menggerakkan motor 8 kali. Tabel 2.6 adalah data biner dan hexsa
commit to user
desimal untuk menggerakkan motor kekanan dengan setengah sudut lebih kecil dari cara pertama.
Tabel 2.6. Data biner dan hexsadesimal pergerakan kekanan dengan sudut kecil Posisi rotor D C B A Data (Hexsadesimal) A 0 0 0 1 01 A-B 0 0 1 1 03 B 0 0 1 0 02 B-C 0 1 1 0 06 C 0 1 0 0 04 C-D 1 1 0 0 0C D 1 0 0 0 08 D-A 1 0 0 1 09
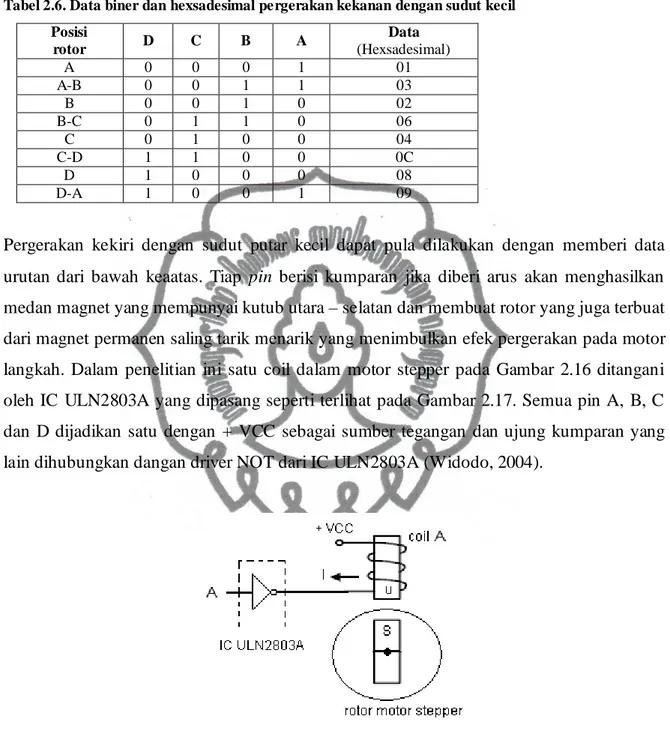
Pergerakan kekiri dengan sudut putar kecil dapat pula dilakukan dengan memberi data urutan dari bawah keaatas. Tiap pin berisi kumparan jika diberi arus akan menghasilkan medan magnet yang mempunyai kutub utara – selatan dan membuat rotor yang juga terbuat dari magnet permanen saling tarik menarik yang menimbulkan efek pergerakan pada motor langkah. Dalam penelitian ini satu coil dalam motor stepper pada Gambar 2.16 ditangani oleh IC ULN2803A yang dipasang seperti terlihat pada Gambar 2.17. Semua pin A, B, C dan D dijadikan satu dengan + VCC sebagai sumber tegangan dan ujung kumparan yang lain dihubungkan dangan driver NOT dari IC ULN2803A (Widodo, 2004).
Gambar 2.17. Desain dasar driver motor stepper.
IC ULN2803A mempunyai 8 driver logika NOT, perhatikan Gambar 2.18 jika pin 1B diberi logika High keluaran pin 1C akan mempunyai logika digital Low yang akan mengijinkan arus maksimal 500 mA masuk ke dalam IC ULN2803A.
commit to user
Gambar 2.18. Pin out dan skema rangkaian dari IC ULN2803A (Data sheet : Texas Instrumentasi, 2008).
E. Sistem Kontrol Lampu LED
Lampu LED adalah komponen elektronik yang terbangun dari bahan semikonduktor yang dapat memancarkan berkas cahaya dengan spektrum tertentu. Struktur dasar lampu LED terbangun dari sambungan bahan semikonduktor ekstrisik tipe P-N. Gambar 2.19 adalah rangkaian dasar yang memfungsikan lampu LED pada kondisi panjar maju.
Gambar 2.19. Rangkaian panjar maju lampu LED
Arus dapat mengalir pada rangkaian Gambar 2.19 jika tegangan +Vcc lebih besar dari tegangan jatuh sambungan P-N (Barun, 2011). Lampu LED yang digunakan dalam penelitian ini mempunyai tegangan jatuh (Vd) sekitar 2,8 V (Optek Technology) dan
commit to user
tegangan +Vcc sekitar 4,86V dan resistor yang digunakan sekitar 101Ω sehingga arus mengalir dapat dianalisa dengan menggunakan hukum khirchoff sebagai berikut :
0 = - Vcc + I R + Vd . . . (2.4) 0 = - 4,86 V + I (101 Ω) + 2,8 V mA I V I 3 , 20 101 ) 8 , 2 86 , 4 ( = W -=
Dari karakteristik lampu LED yang digunakan dalam penelitian ini memiliki arus maksimum untuk panjar maju sekitar 25 mA, sehingga jika desain rangkaian Gambar 2.19 digunakan dalam penelitian ini maka lampu LED pada kondisi yang baik karena dialiri arus dibawah arus maksimumnya. Printer port komputer hanya mempunyai kemampuan maksimum 14 mA untuk menyerap arus dari luar, oleh karena itu dibutuhkan driver atau rangkaian pengkondisi agar komputer dapat mengontrol nyala lampu LED. Gambar 2.20 adalah rangkaian driver lampu LED yang memungkinkan komputer dapat mengontrol nyala dan matinya lampu LED.
Gambar 2.20. Rangkaian driver lampu LED.
IC ULN 2803A adalah komponen logika NOT yang mampu menyerap arus hingga 500mA sehingga jika lampu LED nyala dengan arus 20,3 mA maka IC ULN2803A akan mampu menyerap dengan baik. Jarak ukur efektif antara lampu LED sebagai sumber cahaya dengan LDR adalah sekitar 5 cm (Manoj, dkk, 2009). Untuk dapat menyalakan lampu LED
commit to user
memasukkan data 8 bit hasil konversi ADC0808 ke komputer lewat port parallel menggunakan IC multiplekser 74LS157 dan menggunakan rangkaian Clock pada Gambar 2.12 karena mempunyai frekuensi yang lebih tinggi dari pada menggunakan IC LM555. Gambar 2.21 adalah desain rangkaian yang telah dikembangkan peneliti untuk membuat spektrometer digital yang mempunyai tiga bagian utama yaitu :
1. Rangkaian sistem sensor dengan dua LDR dan rangkaian antarmuka untuk mengkonversi intensitas cahaya menjadi 8 bit data digital yang siap ditampilkan dan dibaca oleh komputer.
2. Rangkaian pengontrol pergerakan LDR.
commit to user
Gambar 2.21. Desain rangkaian spektrometer digital.
Desaian rangkaian Gambar 2.21 mempunyai kebutuhan power supplay yang khusus, hal ini karena komponen digital diberi daya dari regulator yang terpisah dengan daya untuk menggerakkan motor stepper dan lampu LED yang mempunyai kebutuhan arus tiap coil sekitar 62 mA agar tidak saling mengganggu. Gambar 2.22 adalah desain rangkaian power supplay yang didesain khusus untuk memberi daya pada rangkaian Gambar 2.21.
commit to user
Gambar 2.22. Rangkaian power supplay untuk rangkaian spektrometer digital.
Rangkaian power supplay Gambar 2.22 terdiri dari +Vss (+11,97 V) untuk mensupplay +Vref, lalu +Vcc (+4,86 V) untuk mensupplay IC ADC08080, IC 74LS157, IC 74LS14 dan dua sistem sensor dan terakhir +Vcc (+4,86 V) untuk mensupplay daya motor stepper dan lampu LED. IC 6, IC 4 dan IC 5 adalah regulator keping tunggal jenis LMxx dari National Semiconductor yang dapat mengsupplay arus maksimal 1 A untuk masisng – masing regulator. Tegangan keluaran dari IC 4, IC 5 dan IC 6 semuanya difilter lagi dengan kasitor 10 uF / 25V untuk mengaluskan riak – riak yang masih tersisa. Daya utama dari rangkaian power supplay ini didapatkan dari jaringan PLN AC 220V 50/60 Hz yang diturunkan tegangannya oleh trafo jenis CT 12 V/1 A lalu di-DC-kan (direct current) oleh dioda IN4002 yang mampu melewatkan arus maksimum 1 A. Capasitor (C3) berfungsi sebagai penghalus karena itu dipasang dengan kapasitansi besar sekitar 2200 uF/36V. Berikutnya Arus dicabang ke arah lampu LED sebagai indikator dengan nilai hambatan sekitar 330 Ω sehingga lampu LED menyala pada kondisi arus 10 mA.
Komponen aktif pada Gambar 2.21 adalah komponen IC ADC0808 beserta sensor cahaya sebagai alat ukur intensitas cahaya dan komponen kontrol gerak dan kontrol lampu LED yaitu IC ULN2803A. Rangkaian Gambar 2.21 mempunyai dua Input analog dari sistem sensor berbasis LDR. Gambar 2.23 adalah sistem sensor cahaya berbasis LDR dengan menggunakan potensiometer 10 KΩ untuk kalibrasi sensor.
commit to user
Gambar 2.23. Sistem sensor cahaya berbasis LDR dan potensiometer.
Rangkaian Gambar 2.21 didesain sangat efektif dengan dua input analog pada pin AN0 dan AN1 sebagai input analog dikontrol oleh pin A. Efektifitas rangkaian Gambar 2.21 terlihat dari pin B dan C dikoneksikan jadi satu sehingga pemilihan input analog AN0 cukup dengan pin A diberi logika Low dan memilih AN1 dengan memberi logika High. Pemilihan IN0 dan IN1 ini dikontrol oleh komputer lewat port data (D0) dari printer port. Pin OE (output enabled) dan pin 11 (Vcc) dijadikan satu dengan + Vcc, berikutnya pin Start dan ALE (address lacth enabled) dijadikan satu untuk memulai konversi. Pin 13 ground dan pin 16 (–Vref ) dijadikan satu (0 V). Tegangan referensi (+Vref) diperoleh dari potensiometer 5 KΩ yang dihubungkan dengan +Vss dari power supplay untuk mengontrol tegangan referensi pada titik tegangan tertentu. Clock dibangun dari rangkaian RC dan
Schmitt trigger inverter (IC 74HTC14) dengan resistor 1 KΩ dan kapasitor 0,001 uF yang mampu menghasilkan detak 700 KHz. Sistem antarmuka data ADC0808 dengan port status dari printer port dijembatani dengan IC multiplekser 74LS157 dengan pemilihan low nibble
dan High nibble dikontrol oleh port data (D2). Port data (D2) = ’1’ maka PS7*, PS6, PS5 dan PS4 membaca low nibble data dari ADC0808 D0, D1, D2 dan D3. Selanjutnya D2 = ’1’ maka PS7*, PS6, PS5 dan PS4 membaca high nibble data dari ADC0808 D4, D5, D6 dan D7. Tegangan referensi pada pin +Veff diatur pada tegangan + 3 V terhadap (0 V) sehingga IC ADC 0808 hanya mampu mengkonversi dengan tegangan maksimum + 3 V dan mempunyai keteliatian 1 bitnya sebesar :
V V V bit Ketelitian reff 0,0117 256 3 2 1 =+ 8 = =
Kalau diambil dari data LDR NORP12 bahwa 1 Lux menghasilkan nilai hambatan 100 KΩ maka besarnya tegangan keluaran yang siap dikonversi pada input analog sebesar :
commit to user 03 , 38 0117 , 0 4452 , 0 1 = = = V V bit ketelitian V Datadesimal sensor
Nilai desimal dari 38,03 ini setara dengan bilangan biner 0 0 1 0 0 1 1 02 dan ditampilkan
kekomputer sebesar 38 desimal yang selanjutnya menjadi data sesungguhnya setelah dikalikan oleh ketelitian 1 bitnya sebesar :
V V
x V
Data( )=38 0,0117 =0,44
Nilai 0,44 V inilah data terakhir yang disimpan dan ditampilkan dikomputer dalam bentuk grafik dan list data. Jadi besarnya intensitas cahaya 1 Lux mempunyai nilai kesetaraan dengan tegangan 0,44 V begitu juga intensitas cahaya 10 Lux sebesar 4,44 V. Nilai intensitas cahaya terkecil yang dapat dikonversi oleh ADC0808 sebesar 0,0117 Lux yang setara dengan 0,00117 V yang ternyata mempunyai nilai hambatan LDR sebesar 4,18 MΩ. Nilai intensitas terkecil nantinya sebagai acuan dalam pembuatan perangkat lunak. Rangkaian Gambar 2.20 membutuhkan prosedur kontrol untuk mengaktifkan konversi, menterjemahkan hasil konversi menjadi data terukur, mengontrol motor stepper untuk menggerakkan LDR dan terakhir mengontrol lampu LED kesemua itu dapat dilakukan oleh komputer lewat printer port dengan instruksi dari perangkat lunak. Perangkat lunak yang digunakan untuk menuliskan dan mengeksekusinya dipilih Delphi 5.0 dengan bantuan DLL dari Inpout32.dll untuk menjembatani sistem operasi Window Xp. Gambar 2.24 adalah tampilan dari perangkat lunak yang telah berhasil dibangun.
commit to user
Gambar 2.24. Tampilan perangkat lunak spektrometer digital.
Perangkat lunak Gambar 2.24 mempunyai dua tampilan untuk mengeluarkan data pengukuran yaitu grafik angle terhadap intensity (volt) dan list data. Sedangkan kontrol button mempunyai 6 aplikasi yang berbeda – beda.
1. Spectrometer
Groupbox Spectrometer ini adalah fasilitas utama untuk mengukur spektrum cahaya laser HeNe, lampu LED dan juga pergeseran serat optik dalam penelitian ini. Nantinya Spectrometer ini dapat digunakan untuk mengukur spectrum cahaya dari sumber lain. Ketika ingin mengukur spektrum laser HeNe maka ada prosedur yang harus dilakukan yaitu :
a. Pasang laser HeNe pada posisi didepan kisi difraksi lalu tekan tombol Position. b. Lihat data bergerak pada tampilan grafik.
c. Geser posisi laser hingga didapatkan posisi yang paling tinggi intensitas cahaya yang terbaca.
d. Tekan Stop setelah posisi paling tinggi didapatkan.
Prosedur ini dibutuhkan untuk mendapatkan posisi yang benar – benar mendekati posisi tegak lurus antara sinar laser HeNe dengan posisi kisi difraksi. ketika menekan tombol Position maka LDR 1 akan bergerak ke posisi 90 derajat lalu mulai melakukan pengukuran
commit to user 8. listbox1.clear; 9. mr:=0; 10. md:=16; 11. j:=1; 12. repeat 13. out32($378,md); 14. sleep(30); 15. md:=md*2; 16. if md>128 then md:=16; 17. mr:=mr+1; 18. until mr>50; 19. timer1.Enabled:=true; 20. end 21 else 22. begin 23. timer1.Enabled:=false; 24. bitbtn3.Caption:='&Position'; 25. md:=128; 26. repeat 27. out32($378,md); 28. sleep(30); 29. md:=md div 2; 30. if md<16 then md:=128; 31. mr:=mr-1; 32. until mr=0; 33. end; 34. end;
Program pada tombol Position ini membuat motor stepper bergerak tiap 1,8 derajat hingga sudut 90 derajat dari acuan awal baru dia berhenti. List no 3 bekerja jika tombol Position ditekan, jika ditekan maka tombol akan berubah nama jadi Stop (list 5). Berikutnya tampilan grafik dan list data dibersihkan (list 6,7,9). Variabel mr adalah banyaknya instruksi gerak dilakukan dan variabel md adalah data gerak yang diberikan motor stepper. List 12 sampai 18 adalah instruksi motor untuk bergerak 90 derajat. Data pertama yang diberikan motor stepper adalah data 16 desimal (list 13) berikutnya instruksi dihentikan
commit to user
selam 30 millisecond (list 14), berikutnya data desimal 16 dikalikan dengan 2 menghasilkan 32 desimal (list 15). Hasil perkalian tersebut dibandingkan apakah lebih besar dari 128 desimal (list 16) kalau belum maka instruksi pergerakan ditambah 1 (list 17) lalu ditanya apakah perintah hasil list 17 sudah bernilai diatas 50 (list18) kalau belum maka proses intruksi diulangi lagi pada list 13 tapi jika sudah maka aktifkan timer 1 (list 19). Tabel 2.7 adalah isi dari perkalian md yang merupakan data yang diberikan kepada motor stepper hingga dia bergerak 90 derajat.
Tabel 2.7. Perkalian variabel md yang menyebabkan motor bergerak 90 derajat Instruksi 128 64 32 16 Data (desimal) D7 D6 D5 D4 1 0 0 0 1 16 2 0 0 1 0 32 3 0 1 0 0 64 4 1 0 0 0 128 5 0 0 0 1 16 6 0 0 1 0 32 ... ... ... ... ... ... 50 1 0 0 0 128
Ketika tombol Stop ditekan maka list 22 sampai 33 adalah instruksi untuk mengembalikan posisi LDR ketempat semula. List 19 adalah aktifasi Timer 1 yang merupakan prosedur tersendiri untuk mengukur intensitas cahaya tiap 100ms dan menampilkannya pada grafik, berikut ini penjelasan pada prosedur Timer
1. procedure TForm1.Timer1Timer(Sender: TObject); 2. begin 3. Out32($378,$00); 4. Out32($378,$02); 5. Out32($378,$00); 6. repeat 7. eoc:=Inp32($379); 8. asm 9. and eoc,$08 10. end; 11. until eoc=$08 ; 12. x:=Inp32($379); 13. asm 14. mov al,x 15. and al,$f0 16. shr al,4 17. mov x,al 18. end; 19. Out32($378,$04); 20. x1:=Inp32($379);
commit to user
List 3 sampai 5 adalah instruksi untuk mengaktifkan proses konversi dari input analog AN0. Tabel 2.8 adalah relasi data dengan rangkaian 2.22 untuk mengaktifkan ADC0808.
Tabel 2.8. Data relasi dengan rangkaian Gambar 2.22. List D7 D6 D5 D4 D3 D2 (A*/B) D1 (Start/ALE) D0 (A) Data (Hexsadesimal) 3 0 0 0 0 0 0 0 0 00 4 0 0 0 0 0 0 1 0 02 5 0 0 0 0 0 0 0 0 00 19 0 0 0 0 0 1 0 0 04
List 6 sampai 11 adalah proses menunggu pin EOC berlogika 1 artinya proses konversi selesai. List 12 adalah membaca low nibble data yang dimasukkan ke variabel x selanjutnya list 13 sampai 18 adalah instruksi untuk menggeser data 4 bit ke D3, D2, D1 dan D0 sebgai 4 bit data pertama. List 19 adalah instruksi untuk membaca high nibble
dengan memberi high di pin A*/B, lihat tabel 2.8. List 20 adalah membaca high nibble data dan dimasukkan ke variabel x1 lalu digabungkan dengan low nibble data dan menangani S7* yang terinverting. List 27 adalah instruksi mengalikan data akhir dengan tegangan referensi sebesar 3 V dan ditampilkan pada grafik (list 28).
Setelah prosedure Position dilakukan dan menghasilkan data tertinggi langkah selanjutnya untuk mengukur spektrum laser HeNe dengan memilih sudut pergeseran LDR yang diinginkan, caranya tekan pilihan 1,8 atau 0,9 derajat pada perangkat lunak Gambar 2.24. lalu tekan tombol Single. Ada dua tombol utama Single dan Reference yang mempunyai fasilitas sendiri yaitu jika tekan tombol Single maka hanya LDR 1 saja yang mengukur intensitas cahaya tapi jika tombol Reference maka dua LDR mengukur dalam waktu bergantian. Berikut ini list program dan penjelasan ketika menekan tombol Single ;
commit to user
1. procedure TForm1.BitBtn1Click(Sender: TObject); 2. begin 3. label3.caption:='Angle'; 4. label1.caption:='Angle'; 5. label4.caption:='SPECTROMETER'; 6. if radiobutton2.Checked then // 1,8 7. begin 8. excel:=1; 9. bitbtn1.caption:='Wait'; 10. series1.clear; 11. series2.clear; 12. listbox1.clear; 13. mr:=0; 14. md:=16; 15. j:=1; 16. i:=1; 17. timee:=300; 18. repeat 19. out32($378,md); 20. sleep(timee); 21. md:=md*2; 22. if md>128 then md:=16;
23. Out32($378,$00); //read data 24. Out32($378,$02); 25. Out32($378,$00); 26. repeat 27. eoc:=Inp32($379); 28. asm 29. and eoc,$08 30. end; 31. until eoc=$08 ; 32. sleep(1); 33. x:=Inp32($379); 34. asm 35. mov al,x 36. and al,$f0 37. shr al,4 38. mov x,al 39. end; 40. Out32($378,$04); 41. x1:=Inp32($379); 42. asm 43. mov al,x1 44. and al,$f0 45. or x,al 46. xor x,$88 47. end; 48. data:=x*vreff; 49. angle:=j * 1.8; 50. series1.addxy(angle,data);
commit to user 62. out32($378,md); 63. sleep(30); 64. md:=md div 2; 65. if md<16 then md:=128; 66. mr:=mr-1; 67. until mr=0; 68. bitbtn1.caption:='Single'; 69. end; 70. if radiobutton3.Checked then // 0,9 71. begin 72. excel:=1; 73. bitbtn1.caption:='Wait'; 74. md:=0; 75. mr:=0; 76. j:=1; 77. i:=1; 78. timee:=300; 79. series1.clear; 80. series2.clear; 81. listbox1.clear; 82. repeat 83. out32($378,motor[md]); 84. sleep(timee); 85. md:=md+1; 86. mr:=mr+1; 87. if md=8 then md:=0;
88. Out32($378,$00); //read data 89. Out32($378,$02); 90. Out32($378,$00); 91. repeat 92. eoc:=Inp32($379); 93. asm 94. and eoc,$08 95. end; 96. until eoc=$08 ; 97. sleep(1); 98. x:=Inp32($379); 99. asm 100. mov al,x