Screw Theory and Reciprocity
Latifah Nurahmi
Definition of Screw
A spatial displacement of a rigid body can be expressed as a
combination of a rotation about a line and a translation along
the same line. This combined motion is called
screw displacement
.
A unit screw $ is defined as:
S
S
S
S
S
S
5 4 3 2 1 s s r s $
Definition of Screw
A unit screw $ is defined as:
s = a unit vector along the axis of the screw $
r = a position vector of any point on the screw axis of $ λ = pitch
S
S
S
S
S
S
6 5 4 3 2 1 s s r s $
Definition of Screw
A unit screw :
(λ = 0), s s r s $
s r s$
0 (λ = ∞), s 0$
Zero-pitch screw
Infinite-pitch screw
(λ ≠ ∞, λ ≠ 0), Finite-pitch screw
s s r s$
h
Screw Systems
A
screw system
of order n (0 ≤ n ≤ 6) comprises all the screws
that are linearly dependent on n given linearly independent screw.
Definition of Twist and Wrench
Twist
A twist represents an instantaneous motion of a rigid body.
Zero-pitch twist pure rotation.
Infinite-pitch twist pure translation.
0
Wrench
A wrench represents a system of forces and moments acting on
a rigid body.
Zero-pitch wrench F pure force
Infinite-pitch wrench M pure moment
Relations to Kinematic Joints
system
01
system
1
system
03
system
2
1
0system
1
1
0Relations to Serial Kinematic Chain
A rigid body constrained to move in the plane
The end effector is constrained to rotate and translate in the plane.
The screw system associated with the available twists is of order 3.
Available twists
Relations to Serial Kinematic Chain
Two rigid bodies connected by three prismatic joints
The screw system describing all the available twists consists of all screws with infinite pitch.
All translatory motions are instantaneously (in this particular example, also finite translatory motions) possible.
The set of all twists is a third order screw system.
Body 2 Body 1
Definition of Reciprocity
Work done by a wrench on a twist
The rate of work done by a wrench w = [fT, mT ]T on a twist t = [wT, vT ]T is given by
Alternatively,
Reciprocity
Two screws are said to be reciprocal if a wrench applied about one does no work on a twist about the other.
P f v m w
P T v f m t w w 0 I I 0 3 3 3 3 3 3 3 3Reciprocal Screws
Two screws S
1(pitch h
1) S
2(pitch
h
2) are reciprocal if and only if
(h
1+ h
2) cos
f
- d sin
f
= 0
Remarks
A wrench applied about S1does no
work on a twist about S2.
A wrench applied about S2does no
work on a twist about S1.
The condition for reciprocity is a purely geometric relationship
f
d
f
m
v
w
S
1S
2Reciprocal Screws (continued)
Derivation
f
d
f
m
v
w
S
1S
2x
y
z
S1 S 1 2 2 2 1 0 0 0 0 0 0 h h d h d , cos sin cos sin sin cos f f f f f f w f m t v f h h d h d 1 0 0 0 0 0 0 1 2 2 , cos sin cos sin sin cos w w f f f f f f
f v m w 0 h1h2 cosfdsinf0Examples
Screws reciprocal to a zero pitch screw
A wrench acting on a rigid body free to rotate about a revolute joint does no work on the rigid body if one of the following is true
The wrench is of zero pitch and the axis intersects the axis of rotation
The wrench of infinite pitch is perpendicular to the axis of rotation
The pitch is non zero but equal to
d tan f Note: If m cosf f d sin f,
the wrench does no work.
q S1
d
f
m
f
S2(h
1+ h
2) cos
f
- d sin
f
= 0
Examples (continued)
Screws reciprocal to an infinite pitch screw
A wrench acting on a rigid body free to translate along a prismatic joint does no work on the rigid body if one of the following is true
The wrench is of infinite pitch.
The pitch is zero or finite, but the axis is perpendicular to the axis of the prismatic joint. S1
d
f
m
f
S2 rf v
w
m
0
Reciprocal Screw Systems
Definition of a screw system
The vector space of all screws generated by taking all possible
linear combinations of a finite number of screws.
Reciprocal screw systems
Two screw systems are reciprocal if every screw in the first
screw system is reciprocal to all screws in the second screw
system.
Important Property
Given a screw system, the set of all screws reciprocal to every
screw in the given screw system is another screw system.
Example
The screw system consisting of all screws
reciprocal to a given zero pitch screw
Given screw system is a first order screw
system defined by a zero pitch screw.
The reciprocal screw system consists of
All screws of zero pitch such that the screw axes intersect the axis of the given zero pitch screw Screws of pitch equal to d tan f
f
d
f
m
v
w
S
1S
2Properties
Given a screw system, the set of all screws reciprocal to every screw in the given screw system is another screw system.
The screw system reciprocal to a nth order screw system is of order (6-n) A rigid body subject to constraints has the following property:
Available twists
dim = n
Constraint wrenches
dim = 6-n
Reciprocity
Another view point
A pure force Fperpendicular to t, cannot produce any translation along t
Twist and wrench systems for
a kinematic joint
The set of all twists allowed by a joint is reciprocal to the set of all wrenches that can be resisted (passively) by the joint.
A n degree-of-freedom joint has a screw system of order n associated with the available twists and a screw system of order (6-n) associated with the wrenches that can be transmitted by the joint.
Available twists
dim = n
Constraint wrenches
dim = 6-n
Reciprocity
Reciprocal Twist and Wrench in
Kinematic Joints
Example 1
Two rigid bodies connected by a spherical joint
The set of available twists for the moving rigid body is described by a screw system consisting of all screws with zero pitch passing through the center of the spherical joint.
The set of all twists is a three-dimensional vector space. The screw system is order 3.
The set of all wrenches that do no work is described by the reciprocal screw system The reciprocal screw system is of order (6-3=) 3
It consists of all pure forces passing through the center of the spherical joint.
Fixed rigid body
Example 2
A serial kinematic chain, composed of P and R joints connecting link a and b.
If link a is fixed and link b is moving, the twist of link b is:
The screw system associated with the available twists is of order 2.
The screw system associated with the constraint wrenches (the wrenches that can do no work on the end effector) is of order 4.
Example 3
Two rigid bodies connected by three prismatic joints
The screw system describing all the available twists consists of all screws with infinite pitch.
All translatory motions are instantaneously (in this particular example, also finite translatory motions) possible.
The set of all twists is a third order screw system.
The reciprocal screw system describing all the wrenches that do no work on the constrained rigid body (Body 2) consists of all infinite pitch screws.
No couple can do work on Body 2.
The set of all constraint wrenches is a third order screw system.
Body 2 Body 1
Example 4
A rigid body constrained to move in the plane
The end effector is constrained to rotate and translate in the plane.
The screw system associated with the available twists is of order 3.
The screw system associated with the constraint wrenches (the wrenches that can do no work on the end effector) is also of order 3.
Available twists
Constraint wrenches
Type Synthesis
Type synthesis adalah salah satu proses desain untuk mensintesa jenis-jenis
atau tipe-tipe kaki robot.
Type synthesis dapat dilakukan berdasarkan Screw theory dan Virtual chain
Virtual Chain adalah sebuah serial kinematic chain yang mempunyai tipe
gerakan tertentu untuk menggambarkan jenis gerakan pada parallel manipulator.
Virtual chain diusulkan berdasarkan analisa wrench system dan virtual chain yang paling sederhana harus dipilih.
Contoh 1 virtual chain pada
parallel manipulator
Sebuah Parallel Manipulator (PM) mempunyai 3-DOF dengan
Virtual chain yang paling sederhana untuk menggambar PM tersebut adalah tiga P-joints yang terhubung secara seri.
PPP-Virtual Chain system
3Contoh 2 virtual chain pada
parallel manipulator
Sebuah Parallel Manipulator (PM) mempunyai 3-DOF dengan
Virtual chain yang paling sederhana untuk menggambar PM tersebut adalah tiga R-joints yang terhubung secara seri atau satu S-joint.
S-Virtual Chain
system
0 3
Contoh 3 virtual chain pada
parallel manipulator
Sebuah Parallel Manipulator (PM) mempunyai 4-DOF dengan
Virtual chain yang paling sederhana untuk menggambar PM tersebut adalah tiga P-joints dan satu R-joint yang terhubung secara seri.
PPPR-Virtual Chain system
2Prosedur Type Synthesis
Parallel Manipulator
Prosedur Type Synthesis
Parallel Manipulator
Langkah 3 – Merangkai kaki robot menjadi parallel manipulator
Syarat-syarat yang harus dipenuhi dalam merangkai kaki robot:
1. Setiap kaki harus mempunyai dof yang sama dengan virtual chain
2. Wrench system dari PM harus sama dengan virtual chain
Langkah 4 – Seleksi joint yang akan diaktuasi
Dalam memilih joint yang akan diaktuasi (diberi motor), beberapa kriteri berikut harus diikuti:
1. Harus terdistribusi diantara semua kaki
2. Lebih disukai yang berada di bas
Type Synthesis Schönflies Motion
Parallel Manipulator
Type Synthesis Schönflies Motion Parallel
Manipulator
Langkah 1: Dekomposisi wrench system
system
2
system
1
m c Δ c1 c2 c3 c4 c5 2 2 2 2 2 1 2 1 0 1 1 3 2 4 2 2 2 3 2 2 1 2 2 1 1 1 1 1 1 4 2 6 2 2 2 2 5 2 2 2 1 4 2 2 1 1 3 2 1 1 1 2 1 1 1 1 5 2 8 2 2 2 2 2 7 2 2 2 2 1 6 2 2 2 1 1 5 2 2 1 1 1 4 2 1 1 1 1Kombinasi wrench system setiap kaki (2-5 kaki)
Type Synthesis Schönflies Motion Parallel
Manipulator
Langkah 2: Type synthesis dari setiap kaki Kasus (1.)
Menghitung jumlah joint di setiap kaki
8 joints termasuk PPPR Virtual chain
system
2
joints 8 ) 6 ( F c fType Synthesis Schönflies Motion Parallel
Manipulator
Type Synthesis Schönflies Motion Parallel
Manipulator
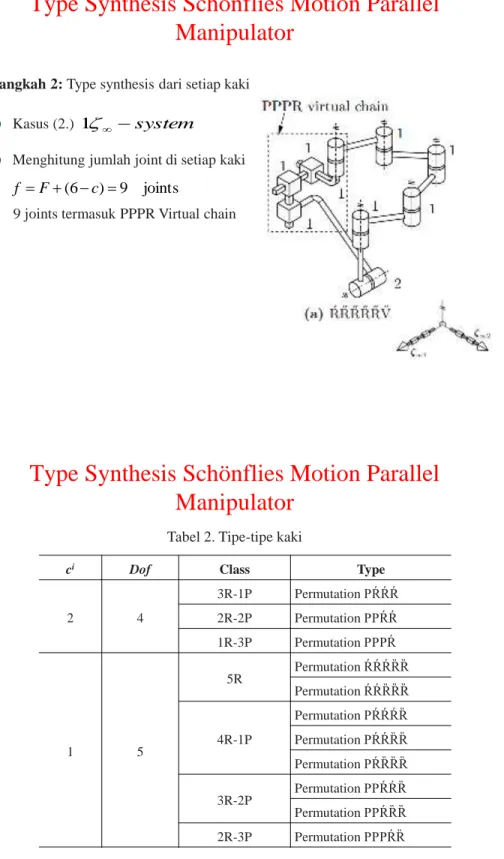
Langkah 2: Type synthesis dari setiap kaki Kasus (2.)
Menghitung jumlah joint di setiap kaki
9 joints termasuk PPPR Virtual chain
system
1
joints 9 ) 6 ( F c fType Synthesis Schönflies Motion Parallel
Manipulator
Tabel 2. Tipe-tipe kaki
ci Dof Class Type
2 4 3R-1P Permutation PŔŔŔ 2R-2P Permutation PPŔŔ 1R-3P Permutation PPPŔ 1 5 5R Permutation ŔŔŔȐȐ Permutation ŔŔȐȐȐ 4R-1P Permutation PŔŔŔȐ Permutation PŔŔȐȐ Permutation PŔȐȐȐ 3R-2P Permutation PPŔŔȐ Permutation PPŔȐȐ
Type Synthesis Schönflies Motion Parallel
Manipulator
Langkah 3: Merangkai kaki
m c Δ c1 c2 c3 c4 c5 2 2 2 2 2 1 2 1 0 1 1 3 2 4 2 2 2 3 2 2 1 2 2 1 1 1 1 1 1 4 2 6 2 2 2 2 5 2 2 2 1 4 2 2 1 1 3 2 1 1 1 2 1 1 1 1 5 2 8 2 2 2 2 2 7 2 2 2 2 1 6 2 2 2 1 1 5 2 2 1 1 1 4 2 1 1 1 1 3 1 1 1 1 1
ci Dof Class Type
2 4 3R-1P Permutation PŔŔŔ 2R-2P Permutation PPŔŔ 1R-3P Permutation PPPŔ 1 5 5R Permutation ŔŔŔȐȐ Permutation ŔŔȐȐȐ 4R-1P Permutation PŔŔŔȐ Permutation PŔŔȐȐ Permutation PŔȐȐȐ 3R-2P Permutation PPŔŔȐ Permutation PPŔȐȐ 2R-3P Permutation PPPŔȐ Table 1 Table 2
Type Synthesis Schönflies Motion Parallel
Manipulator
Langkah 4: Selection of the actuated joint Kriteria:
1. Harus terdistribusi diantara semua kaki
2. Lebih disukai yang berada di bas 3. Sebaiknya tidak ada P-joint yang
tidak diaktuasi/pasif. Quadrupteron PM Li= PiȐi 1Ȑi2Ȑi3Ŕi i = 1, 2, 3 L4= PŔ1Ŕ2Ŕ3,