STUDI EFEKTIVITAS SENSOR ACCELEROMETER MPU 6050 SEBAGAI PENDETEKSI GETARAN SECARA NIRKABEL
TESIS
OLEH:
ULFA HASNITA 147034009
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
2018
Universitas Sumatera Utara
TESIS
Untuk Memperoleh Gelar Magister Teknik Dalam Program Studi Magister Teknik Elektro Pada Fakultas Teknik Universitas Sumatera Utara
OLEH:
ULFA HASNITA 147034009
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
2018
Universitas Sumatera Utara
PANITIA PENGUJI TESIS
Ketua : Suherman, S.T., M.Comp., Ph.D.
Anggota : 1. Dr. Ali Hanafiah, S.T., M.T.
2. Ir. Fahmi, M.Sc., IPM., Ph.D.
3. Dr. Maksum Pinem, S.T., M.T.
i ABSTRAK
Getaran merupakan gerak bolak balik dalam suatu interval waktu tertentu yang menghasilkan gelombang yang merambat pada suatu medium. Getaran dapat terjadi dalam skala kecil maupun skala besar. Dalam skala kecil, sensor getaran diperlukan untuk mendeteksi fenomena tertentu seperti getaran mesin, kapasitas roda dan deteksi tekanan. Sementara dalam skala besar, sensor getaran dapat digunakan mendeteksi gempa guncangan dan fenomena besar lainnya. Untuk merancang sistem pendeteksian getaran real time jarak jauh, diperlukan komponen sensor getaran, pengendali dan sistem radio. Tesis ini mengkaji kinerja sensor accelerometer MPU 6050 jika digunakan untuk mendeteksi getaran secara nirkabel. Hasil pengujian menunjukkan, sensitifitas sistem sensor getaran nirkabel yang dirancang memiliki 3 sumbu pendeteksian getaran, dimana sumbu z memiliki sensitifitas tertinggi, mencapai 78 dan 97 kali dari sumbu x dan y. Simpangan terbesar diakibatkan adanya getaran mencapai 1,6 g. Nilai akselerasi secara non-linier makin besar jika sumber getaran meningkat. Media dasar aluminium menghasilkan pendeteksian 8,69 kali lebih besar dari bahan keramik. Getaran pada jarak 2 cm 48,8% kali lebih besar dari jarak 10 cm. Selain itu, semakin tinggi frekuensi pengambilan data dilakukan, semakin tinggi simpangan akselerasi, dengan nilai percepatan rata-rata mencapai 0, 1564 g saat periode pengambilan data 150 mili detik, lebih tinggi dari jika periode 200 dan 250 mili detik yang memberikan nilai 0,1491 g dan 0,1049 g.
Kata kunci : Sensor getaran, sensor nirkabel, radio 433 MHz, pengujian sensor
Universitas Sumatera Utara
ABSTRACT
Vibration is a back and forth motion in a certain time interval that produces waves that propagate on a medium. Vibration can occur on a small scale or large scale. On a small scale, a vibration sensor is needed to detect certain phenomena such as engine vibration, wheel capacity and pressure detection. While on a large scale, vibration sensors can be used to detect earthquake shocks and other major phenomena. To design a remote real-time vibration detection system, it requires vibration sensor components, controllers and radio systems. This thesis examines the performance of the MPU 6050 accelerometer sensor if it is used to detect vibrations wirelessly. The test results show that the sensitivity of the wireless vibration sensor system designed has 3 vibration detection axes, where the z axis has the highest sensitivity, reaching 78 and 97 times from the x and y axis. The biggest deviation is caused by vibration reaching 1.6 g. The non-linear acceleration value increases if the vibration source increases. The aluminum base media produces 8.69 times greater detection than ceramic materials. Vibration at a distance of 2 cm is 48.8% times greater than a distance of 10 cm. In addition, the higher the frequency of data retrieval is done, the higher the acceleration deviation, with the average acceleration reaching 0, 1564 g when the data collection period is 150 milliseconds, higher than if the period 200 and 250 milliseconds gives a value of 0.1491 g and 0.1049 g.
Keywords: Vibration sensor, wireless sensor, 433 MHz radio, sensor testing
iii
KATA PENGANTAR
Alhamdulillah, puji syukur kehadirat Allah SWT atas segala nikmat dan rahmat yang telah diberikan-Nya serta segala pertolongan dan kemudahan sehingga penulis dapat menyelesaikan tesis yang berjudul “Studi Efektivitas Sensor Accelerometer MPU 6050 sebagai Pendeteksi Geteran secara Nirkabel”.
Tesis ini disusun untuk memenuhi salah satu persyaratan dalam memperoleh gelar Magister Teknik (M.T.) pada Program Studi Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
Ungkapan rasa terima kasih yang tak berhingga penulis sampaikan kepada Ayahanda H. Hasbul Tahar Sitorus, S.Sos. dan Ibunda Hj. Juniarty Koto, Suami tercinta Abdul Haris Nasution, M.Pd., Ananda tersayang Dzikra Aditya Nasution serta keluarga yang selalu memberi dorongan, semangat dan motivasi dalam penyelesaian penelitian ini.
Penulis menyadari bahwa dalam penyusunan tesis ini tidak terlepas dari bimbingan, bantua, arahan, motivasi, maupun fasilitas dari berbagai pihak. Oleh karena itu, pada kesempatan ini penulis menyampaikan rasa hormat dan mengucapkan terima kasih setulusnya kepada:
1. Bapak Suherman, S.T., M.Comp., Ph.D., selaku dosen pembimbing juga selaku Ketua Program Studi Magister Teknik Elektro, Fakultas Teknik Elektro yang telah membimbing dan memberi dorangan serta arahan hingga penulisan tesis ini dapat diselesaikan dengan baik.
Universitas Sumatera Utara
2. Bapak Dr. Ali Hanafiah, S.T., M.T., selaku dosen pembimbing 2 yang telah memberikan bimbingan dan saran dalam penyusunan tesis ini.
3. Bapak Ir. Fahmi, M.Sc., IPM., Ph.D. dan Bapak Dr. Maksum Pinem, S.T., M.T., selaku dosen penguji yang telah banyak memberikan saran dan masukan kepada penulis.
4. Kak Nur, sebagai pegawai administrasi Pascasarjana Teknik Elektro yang selalu memberikan arahan dan perhatian dalam penyusunan tesis ini.
5. Seluruh Dosen dan Staf khususnya Teknik Elektro Politeknik Negeri Medan.
6. Seluruh mahasiswa, dosen, dan civitas akademika Program Studi Magister Teknik Elektro USU.
Dengan keterbatasan pengalaman, ilmu maupun pustaka yang ditinjau, penulis menyadari bahwa tesis ini masih terdapat beberapa kekurangan dan kelemahan.
Untuk itu saran dan kritik yang konstruktif akan sangat membantu agar tesis ini dapat menjadi karya ilmiah yang baik dan membanggakan. Semoga tulisan ini dapat berguna bagi pembaca, dan dapat dilanjutkan untuk memperoleh hasil yang lebih bermanfaat dikemudian hari.
Medan, 28 Desember 2018
Penulis
v
DAFTAR RIWAYAT HIDUP
Saya yang bertandatangan di bawah ini,
Nama : Ulfa Hasnita
Tempat/Tanggal Lahir : Medan, 26 Januari 1991 Jenis Kelamin : Perempuan
Agama : Islam
Bangsa : Indonesia
Alamat : Jl. Saudara No. 67 Medan
Menerangkan dengan sesungguhnya riwayat hidup sebagai berikut:
PENDIDIKAN
1. Tamatan SD Negeri No. 060819 Medan Tahun 2002
2. Tamatan SMP Negeri 3 Medan Tahun 2005
3. Tamatan SMK Telkom Sandhy Putra Medan Tahun 2008 4. Tamatan Teknik Elektro Politeknik Negeri Medan Tahun 2011 5. Tamatan FMIPA Universitas Sumatera Utara Tahun 2014
PEKERJAAN
Pegawai honorer di Politeknik Negeri Medan
Medan, 28 Desember 2018
Penulis
Universitas Sumatera Utara
DAFTAR ISI
Halaman
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR RIWAYAT HIDUP ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... x
BAB 1... 1
PENDAHULUAN... 1
1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 3
1.3. Tujuan Penelitian ... 3
1.4. Batasan Masalah ... 3
1.5. Manfaat Penelitian ... 4
BAB 2... 5
TINJAUAN PUSTAKA... 5
2.1. Tinjauan Fisika Getaran ... 5
2.2. Sensor Accelerometer MPU-6050 ... 7
2.3. Sistem Radio Nirkabel ... 11
2.4. Pengendali ATmega328p ... 12
2.6 Pengendali Atmega8 ... 14
2.7 Komunikasi Serial (USART) ... 14
2.8 Radio 433 MHz ... 14
2.9 Sistem Sensor Gempa Bumi ... 16
BAB 3... 18
PERANCANGAN SISTEM ... 18
vii
3.1. Umum ... 18
3.2. Diagram Blok Sistem ... 18
3.3. Perangkat Keras ... 19
3.2.1 Rangkaian Pemancar ... 19
3.2.2 Rangkaian Penerima ... 20
3.4. Perangkat Lunak ... 22
3.5. Perangkat Pengujian Sensor ... 23
3.6. Pengujian Radio 433 MHz ... 24
BAB 4... 28
PENGUJIAN DAN ANALISIS HASIL UJI ... 28
4.2.1 Pengujian pada kondisi tanpa beban ... 30
4.2.2 Respon sensor terhadap getaran ... 32
4.2.3 Pengaruh sumber getaran ... 35
4.2.4 Pengaruh bahan lantai ... 37
4.2.5 Pengaruh jarak sensor dengan titik beban dijatuhkan ... 39
4.2.6 Pengaruh periode ... 41
BAB 5... 43
KESIMPULAN DAN SARAN ... 43
DAFTAR PUSTAKA ... 45
Universitas Sumatera Utara
DAFTAR GAMBAR
Halaman
Gambar 2.1. Sensor MPU 6050 ... 8
Gambar 2.2. Orientasi sumbu sensitivitas polaritas rotasi MPU 6050 ... 10
Gambar 2.3. RF modul 433 MHz MX-FS-03 V & MX-05 ... 11
Gambar 2.4. Rangkaian Sistem Minimum Atmega328p ... 13
Gambar 2.5. Pin Map ATMega 328p ... 13
Gambar 3.1. Blok diagram perancangan perangkat ………19
Gambar 3.2. Rangkaian Pemancar ... 20
Gambar 3.3. Rangkaian penerima ... 21
Gambar 3.4. Diagram alir piranti lunak pemancar ... 22
Gambar 3.5. Diagram piranti lunak Atmega8 ... 23
Gambar 3.6. Sketsa pengujian ... 24
Gambar 3.7. Blok diagram pengujian modul radio frekuensi 433 MHz ... 25
Gambar 3.8. Hasil pengujian modul radio frekuensi 433 MHz ... 26
Gambar 4.1. Proses pengujian rangkaian dan pengambilan data ………...28
Gambar 4.2. Sumbu sensitivitas akselerasi ... 29
Gambar 4.3. Grafik kondisi tanpa beban ... 31
Gambar 4.4. Perbandingan sumbu x, y, z, dan resultan ... 31
Gambar 4.5. Grafik percepatan sumbu xyz ... 34
Gambar 4.6. Grafik percepatan resultan ... 34
ix
Halaman
Gambar 4.7. Nilai rata-rata percepatan saat terjadi getaran ... 35
Gambar 4.8. Pengukuran dengan beban 3 kg, 6 kg, dan 9 kg ... 36
Gambar 4.9. Getaran rata-rata dengan beban 3 kg, 6 kg, dan 9 kg ... 36
Gambar 4.10. Pengaruh bahan landasan sensor ... 38
Gambar 4.11. Nilai getaran bahan landasan sensor ... 39
Gambar 4.12. Pengukuran jarak 2 cm dan 10 cm dari beban jatuh ... 40
Gambar 4.13. Pengaruh jarak terhadap getaran ... 40
Gambar 4.14. Pengaruh periode terhadap getaran ... 41
Gambar 4.15. Nilai rata-rata getaran terhadap periode ... 42
Universitas Sumatera Utara
DAFTAR TABEL
Halaman
Tabel 2.1. Frekuensi ISM dan aplikasinya ... 15
Tabel 2.2. Hubungan antara Magnitude Skala Richter dengan percepatan ... 17
Tabel 3.1. Hasil pengukuran jarakmodul RF 433 MHz ………...………..27
Tabel 4.1. Pengukuran kondisi tanpa beban ………...30
Tabel 4.2. Tabel respon sumbu xyz dan resultan ... 32
Tabel 4.3. Pengukuran pengaruh bahan landasan sensor ... 37
1 BAB 1
PENDAHULUAN
1.1. Latar Belakang
Getaran merupakan suatu gerak bolak-balik di sekitar kesetimbangan, dimana kesetimbangan adalah keadaan dimana suatu benda berada pada posisi diam jika tidak ada gaya yang bekerja pada benda tersebut. Geteran mempunyai amplitudo (jarak simpangan terjauh dengan titik tengah) yang sama. Gerak dapat berulang dan tiap ulangan gerak dapat ditempuh dalam waktu yang sama yang disebut dengan gerak periodik.
Dalam skala kecil, getaran yang biasanya ditimbulkan oleh sarana dan peralatan kegiatan manusia atau dapat disebut juga dengan getaran mekanik. Getaran tersebut terjadi pada senar gitar yang dipetik, pita suara yang bergetar, dan juga mesin yang sedang bekerja pada industri.
Dalam skala besar, getaran dapat berupa pergeseran lempeng bumi, ledakan maupun fenomena fisik lainnya. Gempa bumi adalah getaran dalam bumi yang terjadi sebagai akibat dari terlepasnya energi yang terkumpul secara tiba-tiba dalam batuan yang mengalami deformasi [1]. Gempa bumi merupakan fenomena alam yang tidak mungkin dihindari kedatangannya. Fenomena alam ini terjadi karena pergeseran lempeng tektonik secara tiba-tiba dengan kekuatan ber skala kecil sampai skala yang besar. Salah satu dampak dari bencana gempa bumi adalah kerusakan pada sebuah bangunan karena gelombang pada gempa bumi menyebabkan lapisan tanah bergerak
Universitas Sumatera Utara
dan menggoyangkan bangunan yang berada di atas tanah dan menghasilkan keruntuhan pada bangunan tersebut.
Saat ini kebutuhan informasi data getaran yang cepat dan akurat sangat diperlukan baik dalam skala kecil untuk menunjang dunia industri maupun skala besar seperti deteksi bencana. Untuk skala besar seperti bencana gempa bumi, pendeteksi getaran dapat dipasang di sembarang posisi baik di dalam maupun di luar bangunan. Selain itu piranti pendeteksi harus bersifat sederhana, mudah dioperasikan, memiliki validitas sinyal yang akurat dan dapat mengidentifikasi terjadinya gempa bumi dengan arah rambatan gelombang horisontal maupun gelombang vertikal [2].
Rahman dan kawan-kawan dalam penelitiannya, menggunakan sensor sensor piezoelektrik yang dilengkapi dengan perekam suara untuk memberikan instruksi-instruksi penyelamatan dini.
Rancangan menggunakan ATMega16. Sementara sistem pendeteksi dini gempa bumi berbasis piezoelektrik yang dapat mendeteksi taraf getaran yang sangat kecil dan waktu respon rata-rata SMS sekitarnya 10 detik tergantung kualitas sinyal dan trafic data dari suatu provider oleh pengguna [2]. Berbagai sistem peringatan dini telah banyak dikembangkan. Pada tahun 2011, Jamal telah membuat alat pendeteksi gempa dengan metode FM berbasis personal komputer. Alat ini bekerja sangat baik dengan menghasilkan sebuah simulasi yang nantinya diharuskan membuat stasiun pengukuran di beberapa tempat. Kelemahan alat ini adalah jarak yang bisa diindera masih sangat pendek yaitu mampu mengindera pada jarak maksimum 100 cm.
Mengingat pentingnya sensor getaran untuk aplikasi skala kecil dan besar, maka diperlukan pengetahuan karakteristik sensor getaran. Meskipun datasheet
3
sensor memberikan data yang diperlukan, pengujian efektifitas sensor belum ditemukan dalam referensi. Tesis ini fokus pada pengujian efektiftitas sensor accelerometer pada lingkungan nirkabel.
1.2. Rumusan Masalah
Adapun permasalahan yang terkait dengan latar belakang penelitian ini adalah sebagai berikut:
a. Bagaimana merancang efektivitas sensor accelerometer MPU 6050 dalam mendeteksi getaran?
b. Bagaimana respon waktu pendeteksian getaran?
c. Faktor-faktor apa sajakah yang mempengaruhi kinerja sensor getaran?
1.3. Tujuan Penelitian
Tujuan penelitian ini adalah untuk merancang, merealisasikan dan menguji karakteristik sensor getaran accelerometer MPU 6050 yang terhubung secara nirkabel. Karakteristik sensor diuji terhadap besarnya sumber getarak, jarak sumber getaran, media penempatan serta perode pendeteksian.
1.4. Batasan Masalah
Adapun batasan masalah pada penelitian ini adalah:
a. Menggunakan sensor accelerometer MPU 6050.
Universitas Sumatera Utara
b. Proses pengiriman data dari pemancar ke penerima menggunakan radio set dengan frekuensi 433 MHz dengan modulasi ASK.
c. Efektifitas sensor diuji berdasarkan metode penjatuhan beban, dimana sensitifitas sensor diukur pada arah getaran vertikal dengan mengubah massa beban jatuh bebas, jarak peletakan, media penempatan serta periode pendeteksian.
1.5. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini untuk mendapatkan karakteristik sensor getaran sehingga turut membantu perancangan sistem pendeteksian getaran.
Selain itu, rancangan sensor dapat diimplementasikan pada aplikasi sehari-hari.
5 BAB 2
TINJAUAN PUSTAKA
2.1. Tinjauan Fisika Getaran
Getaran lantai merupakan fenomena yang dipengaruhi oleh beberapa parameter, termasuk evaluasi subjektif. Studi telah menunjukkan bahwa orang memiliki tingkat sensitivitas yang berbeda terhadap getaran lantai, dan perbedaan ini diperburuk oleh keadaan dalam ruangan. Misalnya, orang yang duduk disebuah ruangan memiliki toleransi lebih sedikit terhadap getaran lantai daripada orang yang sama berjalan disekitar ruangan. Sementara barang-barang yang ada di dalam ruang akibat getaran lantai, seperti gemertak piring dalam lemari dapat juga mempengaruhi penerimaan manusia. Maka sifat subjektif dari persepsi getaran lantai membuat evaluasi objektif sulit tercapai.
Konten frekuensi adalah istilah yang digunakan untuk menggambarkan jumlah mode seluruh frekuensi sistem lantai. Untuk getaran lantai, frekuensi alami pertama (fn), dikenal sebagai frekuensi alami fundamental yang digunakan untuk tujuan desian. Dengan memperhatikan frekuensi alami fundamental, manusia lebih sensitif terhadap frekuensi rendah daripada getaran frekuensi tinggi. Kisaran sensitif bagi manusia dalam merespon getaran lantai biasanya antara 4 dan 8 Hz.
Frekuensi getaran diartikan sebagai banyaknya geteran yang terjadi selama satu detik atau satu satuan waktu. Frekuensi dapat dirumuskan:
Universitas Sumatera Utara
………..………. (2.1) Dimana :
f = frekuensi (Hz) n = jumlah getaran t = waktu (detik)
Periode getaran diartikan sebagai lamanya waktu yang diperlukan untuk melakukan satu kauli getaran. Periode dirumuskan dengan:
……….…………. (2.2)
Dimana :
T = periode geteran n = jumlah getaran t = waktu (detik)
periode dan frekuensi saling berhubungan dan dapat dihubungkan satu dengan lainnya. Periode adalah kebalikan dari frekuensi, demikian pula sebaliknya. Oleh karena itu didapatkan persamaan:
……….. (2.3) Dimana :
T = periode (detik) f = frekuensi (Hertz/Hz)
7
Dalam peristiwa tumbukan antara dua benda selalu terjadi pemindahan energi dari benda yang satu kepada benda yang lain. Seperti halnya proses pemindahan energi pada umumnya, maka pada proses pemindahan tumbuk juga terdapat kehilangan atau kerugian energi. Jadi dengan adanya peristiwa tumbukan, maka terjadi distribusi energi baru, yaitu bagian dari energi yang diserap dan dibawa oleh kedua benda yang bertumbukan dan bagian dari energi yang disebarkan dan diserap oleh media disekitarnya.
Pada mesin-mesin mekanik saat bekerja sering sekali didasari oleh peristiwa- peristiwa tumbukan, misalnya pada mesin tenun. Dalam mesin seperti ini bagian energi yang diserap oleh komponen-komponen mesin yang bertumbukan menjadi sangat penting, karena energi yang diserap tersebut akan diubah menjadi bentuk energi yang lain. Jadi jelaslah bahwa dalam memilih bahan untuk komponen mesin yang demikian disamping kekuatan harus juga diperhatikan daya serap ahan terhadap energi tumbuk.
2.2. Sensor Accelerometer MPU-6050
Accelerometer adalah sensor yang digunakan untuk mengukur percepatan suatu objek, yaitu mengukur percepatan statis dan dinamisnya. Pengukuran dinamis adalah pengukuran percepatan pada objek bergerak, sedangkan pengukuran statis adalah pengukuran terhadap gravitasi bumi, lebih tepatnya untuk mengukur sudut kemiringan. Prinsip kerja dari sensor accelerometer berdasarkan hukum fisika bahwa apabila suatu konduktor digerakkan melalui suatu medan magnet, atau jika suatu
Universitas Sumatera Utara
medan magnet digerakkan melalui suatu konduktor, maka akan timbul suatu tegangan induksi pada konduktor tersebut. Accelerometer yang diletakkan di permukaan bumi dapat mendeteksi percepatan 1g (ukuran gravitasi bumi) pada titik vertikalnya, untuk percepatan yang dikarenakan oleh pergerakan horizontal maka accelerometer akan mengukur percepatannya secara langsung ketika bergerak secara horizontal.
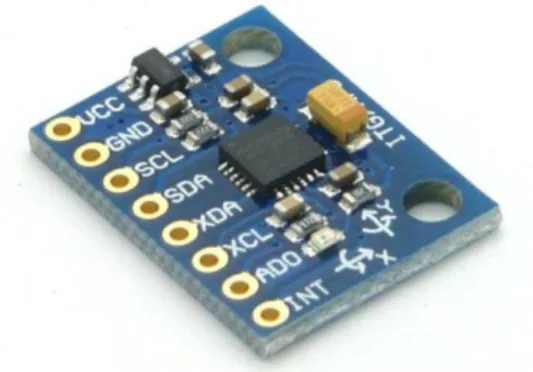
Accelerometer MPU-6050 adalah sebuah modul berinti MPU-6050 yang merupakan 6 axis Motion Processing Unit dengan penambahan regulator tegangan dan beberapa komponen pelengkap lainnya yang membuat modul ini siap pakai dengan tegangan supply sebesar 3-5 VDC. Modul ini memiliki interface I2C yang dapat disambungkan langsung ke MCU (Microcontroller Units) yang memiliki fasilitas I2C. Sensor MPU-6050 berisi sebuah Microelectromechanical Systems (MEMS) Accelerometer dan sebuah MEMS Gyro yang saling terintegrasi. Sensor ini sangat akurat dengan fasilitas hardware internal 16 bit ADC untuk tiap kanalnya.
Dalam tesis ini hanya menggnakan 3 axis untuk keluaran sensor yang menangkap nilai kanal axis x, y, dan z bersamaan dalam satu waktu. Bentuk fisik dari sensor MPU 6050 ditunjukkan pada Gambar 2.1.
Gambar 2.1. Sensor MPU 6050
9
Fitur dan spesifikasi dari modul MPU-6050 adalah berikut ini:
a. Berbasis Chip MPU-6050, berteknologi Motion Fusion yang mengoptimalkan kinerja sensor dan adanya Digital Motion Processor modul dapat diintegrasikan dengan sensor lainnya melalui komunikasi I2C dan bekerja tanpa membebani mikrokontrolernya.
b. Tegangan supply sekitar 3-5 VDC dan pada modul ini sudah dilengkapi LDO (Low Drop-out) Voltage Regulator. Jadi, untuk mendapat sumber tegangan hanya perlu tersambung dengan sumber Vcc.
c. Tersedianya pull-up resistor pada pin SDA dan SCL tanpa resistor eksternal tambahan.
d. Gyroscope Range : + 250 500 1000 2000/s.
e. Acceleration Range : + 2 + 4 + 8 + 16g.
f. Data keluaran MotionFusion sebanyak 6 atau 9 sumbu dalam format matriks rotasi, quarternion, sudut Euler, atau raw data format.
g. Memori penampung data (buffer memory) sebesar 1KB FIFO.
h. Gabungan antara accelerometer dan gyroscope dalam satu sirkuit menyebabkan pendeteksian gerakan dan gravitasi menjadi lebih akurat.
i. Konsumsi arus gyroscope sebesar 3,6 mA; gyroscope+accelerometer 3,8 mA.
j. Chip built-in 16 bit AD converter, 16 bits data output.
k. Jarak antarpin header 2.54 mm.
l. Dimensi modul 20.3 mm x 15.6 mm.
m. Sensor ini sudah banyak dijual di pasaran dengan harga yang relatif murah.
Universitas Sumatera Utara
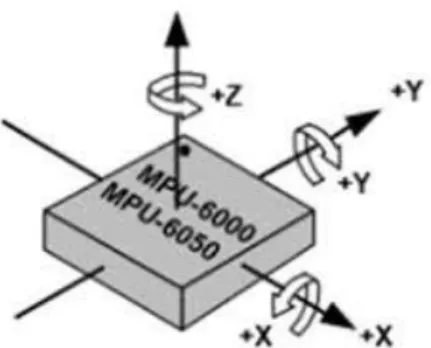
Gambar 2.2. Orientasi sumbu sensitivitas polaritas rotasi MPU 6050
Gambar 2.2. menunjukkan orientasi sumbu dari sensitivitas polaritas dari sensor. Accelerometer berfungsi untuk mengukur percepatan, mendeteksi getaran, dan juga untuk percepatan gravitasi. Pendeteksian gerakan berdasarkan pada 3 sumbu yaitu kanan-kiri, atas bawah, dan depan-belakang. Contoh aplikatif accelerometer seperti pada airbag mobil yang mendeteksi percepatan, gadget elektronik, safety installation pada kendaraan.
Secara teknis percepatan adalah laju perubahan dari kecepatan. Percepatan getaran pada umumnya dinyatakan dalam, satuan “g’s’ peak, dimana satu “g” adalah percepatan yang disebabkan oleh gaya gravitasi pada permukaan bumi. Sesuai dengan perjanjian intemasional satuan gravitasi pada permukaan bumi adalah 980,665cm/det2(386,087inc/det2 atau 32,1739 feet/40).
Nilai getaran dari sensor MPU 6050 berbentuk , , yang merupakan selisih getaran , , terhadap kondisi tanpa getaran , , dengan Persamaan 2.4.
……..…...……….. (2.4)
11
2.3. Sistem Radio Nirkabel
RF Modul (modul frekuensi radio) adalah perangkat elektronik yang digunakan untuk mengirim atau menerima sinyal radio antara dua perangkat. RF Modul yang paling sering digunakan untuk aplikasi pembuka garasi, sistem alarm nirkabel, remote kontrol, aplikasi sensor pintar, dan sistem otomasi rumah nirkabel.
RF modul yang digunakan adalah RF Modul 433MHz MX-FS-03V & MX-05 seperti ditunjukkan pada Gambar 2.3.
Gambar 2.3. RF modul 433 MHz MX-FS-03 V & MX-05
Terdapat 2 komponen yaitu transmitter modul dan receiver modul yang menggunakan modulasi ASK. Amplitudo-shift keying (ASK) merupakan bentuk modulasi amplitudo yang mewakili data digital sebagai variasi amplitudo gelombang pembawa. Dalam sebuah sistem ASK, simbol biner 1 diwakili oleh transmisi tetap amplitudo gelombang pembawa dan frekuensi tetap untuk durasi sedikit T detik. Jika nilai sinyal 1 maka sinyal pembawa akan dikirimkan; sebaliknya, nilai sinyal 0 akan dikirim.
Universitas Sumatera Utara
2.4. Pengendali ATmega328p
ATmega 328p adalah mikrokontroler berbasis arsitektur AVR RISC.
Memiliki memori program flash 32KB, memori EEPROM 1 KB, memori SRAM 2 KB, 14 pin digital I/O, dan 6 pin ADC. Dalam perancangan sistem minimum, akan lebih baik untuk melihat terlebih dahulu Datasheet dari IC yang digunakan untuk memudahkan perancangan.
Perancangan sistem minimum ini juga berlaku untuk Atmega8 maupun ATmega168, karena baik ATmega8, ATmega168, dan ATmega328 memiliki arsitektur fisik yang hampir serupa, tetapi memiliki perbedaan di kapasitas dan kemampuan kerjanya. Adapun komponen yang diperlukan dalam pembuatan sistem minimum Gambar 2.6. adalah:
a. 1 IC mikrokontroler ATmega328p tipe DIP 28 kaki b. 1 soket ic 28 kaki - 1 kristal 16 MHz
c. 2 buah kapasitor keramik 22 pF
d. 1 Push Button - 1 kapasitor elektrolit (polar / elco) 10 uF e. 1 resistor 10 kOhm - kabel jumper (AWG 22) secukupnya f. Pin header (male/female) secukupnya
g. 1 papan percobaan (ProjectBoard/protoboard/breadboard) h. Program downloader (USBISP dan lainnya)
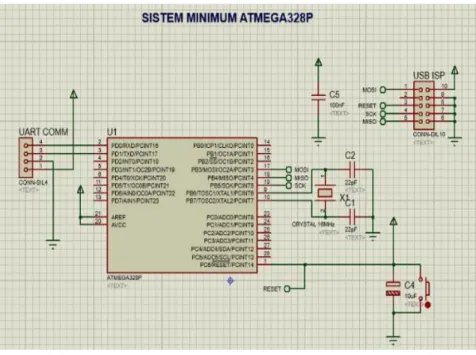
Rangkaian sistem minimum ATMega 328p ditunjukkan pada Gambar 2.4. berikut.
13
Gambar 2.4.Rangkaian Sistem Minimum Atmega328p
Pemetaan pin pada ATmega328p ditunjukkan oleh Gambar 2.5, dengan aplikasi pemrograman dapat menggunakan CodeVision AVR, Atmel Studio, Khazam, dan Arduino IDE.
Gambar 2.5. Pin Map ATMega 328p
Universitas Sumatera Utara
2.6 Pengendali Atmega8
Mikrokontroler ATMega8 juga merupakan mikrokontroler 8 bit dengan arsitektur RISC yang dapat mengeksekusi perintah dalam satu periode clock untuk setiap instruksi dan merupakan seri mikrokontroler AVR. Fitur yang memori ATMega8 8 kbyte flash dan 512 kbyte EEPROM, 1 kbyte SRAM, memiliki 2 timer 8 bit dan 1 timer 16 bit, serta analog to digital converter dan USART.
Atmega8 memiliki analog comparator dan two -wire interface (12C). Kemasan ATMega8 dalam bentuk DIP dan TQFP.
2.7 Komunikasi Serial (USART)
Univeral Synchronous Asynchronous Receiver Transmitter (USART) adalah komunikasi serial antara device ke device dengan frekuensi kerja yang sama maupun tidak sama. Komunikasi ini biasanya digunakan untuk menjalankan modul komunikasi (bluetooth, wifi, dll), komunikasi antar mikrokontroler, dan dalam mikroprosesor/komputer.
2.8 Radio 433 MHz
Frekuensi 433 MHz merupakan bagian dari kanal Industrial, scientific and medical (ISM) untuk aplikasi lokal di bidang industri, pengujian ilmu pengetahuan, dan aplikasi kedokteran. ISM memiliki rentang frekuensi dari beberapa kHz sampai beberapa ratus GHz tergantung aplikasi penggunaan seperti yang ditunjukkan pada Tabel 2.1.
15
Tabel 2.1. Frekuensi ISM dan aplikasinya
Frekuensi (MHz)
Aplikasi Utama RF Power
(umum)
Perkiraan Jumlah Pengguna
Di bawah 0.15
0.15-1
Pemanas induksi (pengelasan dan peleburan logam) Pembersihan secara ultrasonic (15-30 KHz) Aplikasi kedokteran (ultrasonic diagnostic imaging)
Pemanasan induksi industri (heat treating, package sealing, welding dan melting metal)
Diagnostic medis ultrasonic
10 kW-10MW 20-1.000 W 100-1.000 W 1 kW-1 MW 100-1.000 W
> 100.000
> 100.000
> 10.000
> 100.000
> 100.000
1-10 Surgical diathermy (1-10 MHz dampened wave oscillator) Permrosesan kayu (3.2 and 6.5 MHz)
Valve inductiongenerators produksi materi semi konduktor
Pengelasan listrik (1-10 MHzdampened wave oscillator)
100-1.000 W
10 kW-1.5 MW 1-200 kW 2-10 kW
> 100.000
> 1.000
> 10.000
10-100 Pemanasan dielektris (kebanyakan beroperasi pada frekuensi ISM band pada 13.56, 27.12 dan 40.68 MHz, tetapi banyak yang beroperasi padar frekuensi diluar ISM band)
- Keramik
- Pengeringan foundry core - Pengeringan tekstil
- Produk bisnis (buku, kertas, lem, dan pengeringan)
- Makanan (pasca pembakaran kue, pengolahan daging dan ikan) - Pengeringan solvent
- Pengeringan dan pengeleman kayu - Pengeringan dielktrik umum - Pemanasan plastik
Aplikasi kedokteran
- Medical diathermy (27 MHz)
- Magnetic resonance imaging (10-100 MHz di ruangan tertutup)
15-300 kW 15-300 kW 15-200 kW 5-25 kW 10-100 kW
5-400 kW 5-1.000 kW 1-50 kW
(kebanyakan < 5 kW) 100-1.000 W
< 1.000
< 1.000
> 1.000
> 1.000
< 1.000
> 10.000
> 100.000
> 10.000
> 1.000
100-1.000 Pemrosesan makan (915 MHz) Aplikasi kedokteran (433 MHz) RF plasma generators Vulkanisir karet (915 MHz)
< 200 kW < 1.000
< 1.000
Di atas 1.000 FR plasma generators Microwave oven (2.450 MHz) Microwave oven komersial (2.450 MHz) Vulkanisir karet (2.450 MHz) Pengobatan ultraviolet
600-1.500 W 1.5-200 kW 6-100 kW
> 200 juta
< 1.000
Frekuensi ISM 433 MHz digunakan karena tidak sensitif terhadap efek refleksi, dan dapat mencapai jarak beberapa kilometer dengan kebutuhan daya kecil.
kanal 433 MHz juga memiliki atenuasi yang relatif lebih rendah dari pada frekuensi ISM lain.
Sistem radio 433 MHz digunakan di banyak negara, seperti Eropa, Amerika, Cina, Australia, Selandia Baru dan Jepang. Sehingga kemudahan memperoleh modul
Universitas Sumatera Utara
pesawat radio 433 MHz dan dukungan perangkat radio 433 MHz memudahkan penggunaannya.
2.9 Sistem Sensor Gempa Bumi
Sistem sensor gempa bumi adalah sistem yang akan memberikan sebuah monitoring terhadap pergerakan bumi apabila terjadi gempa bumi. Sistem ini bisa memberitahukan orang untuk bersiaga untuk gempa berikutnya agar orang dapat menghentikan kendaraan atau fasilitas umum untuk sementara waktu, menuju ruang terbuka atau pemberitahuan terhadap kejadian yang terjadi di suatu daerah.
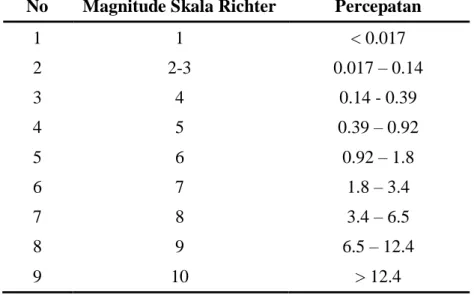
Terdapat beberapa cara dalam mengukur besarnya gempa bumi. Metode pertama yang dapat digunakan adalah skala Richter. Skala Richter dikembangkan oleh Charles F. Richter pada tahun 1934. Skala ini menggunakan rumus berdasarkan nilai amplitudo gelombang terbesar yang terekam pada jenis seismometer tertentu dan jarak antara gempa dan seismometer. Skala lain, berdasarkan nilai amplitudo gelombang dan durasi gempa total, dikembangkan untuk digunakan dalam situasi yang lain dan dirancang agar nilainya konsisten dengan skala Richter. Nilai percepatan magnitude MR dapat dihitung dengan menggunakan rumus :
√ ………..(2.5)
x = nilai yang terbaca pada sumbu x y = nilai yang terbaca pada sumbu y MR = besarnya percepatan
17
Tabel 2.2. Hubungan antara Magnitude Skala Richter dengan percepatan No Magnitude Skala Richter Percepatan
1 1 < 0.017
2 2-3 0.017 – 0.14
3 4 0.14 - 0.39
4 5 0.39 – 0.92
5 6 0.92 – 1.8
6 7 1.8 – 3.4
7 8 3.4 – 6.5
8 9 6.5 – 12.4
9 10 > 12.4
Universitas Sumatera Utara
BAB 3
PERANCANGAN SISTEM
3.1. Umum
Pada bab ini membahas perancangan sistem pendeteksi getaran yang terdiri desain sistem, perancangan sistem perangkat keras (hardware) dan perancangan perangkat lunak (software). Pada perancangan perangkat keras berisi diagram blok yang menjelaskan proses kerja alat, dan pada perancangan perangkat lunak berisi menggunakan bahasa Arduino sebagai bahasa pemrograman dan software Arduino sebagai kompilernya untuk melakukan pemrograman sensor dan sistem.
3.2. Diagram Blok Sistem
Desain sistem atau perancangan sistem adalah merancang atau mendesain suatu sistem yang baik, yang isinya adalah langkah-langkah operasi dalam proses pengolahan data dan prosedur untuk mendukung operasi sistem. Desain inidig unakan sebagai acuan gambaran umum sistem atau mendefiniskan cara kerja sistem secara singkat dan umum.
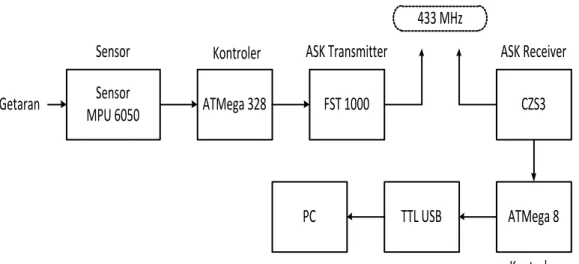
Pada tesis ini sensor accelerometer MPU 6050 dikombinasikan dengan mikrokontroller Atmega328 pada rangkaian pemancar, sementara pada sisi penerima digunakan mikrokontroler Atmega8, link 433 MHz ASK transceiver FST1000 dan CZS3 dengan diagram blok ditunjukan oleh Gambar 3.1.
19
Sensor MPU 6050
Getaran ATMega 328 FST 1000
Sensor Kontroler ASK Transmitter
CZS3 ASK Receiver
ATMega 8 Kontroler TTL USB
PC
433 MHz
Gambar 3.1.Blok diagram perancangan perangkat
3.3. Perangkat Keras
Dalam penelitian ini, sistem pendeteksi getaran dibuat menjadi dua bagian yaitu rangkaian penerima dan rangkaian pemancar. Pada bagian pemancar terdapat sensor getaran MPU 6050, mikrokontroller serta komponen pemancar untuk mengirim hasil sensor melalui gelombang radio. Data yang dikirim tersebut akan diterima oleh rangkaian penerima melalui kompenen ASK receiver yang kemudian diolah untuk ditampilkan pada PC.
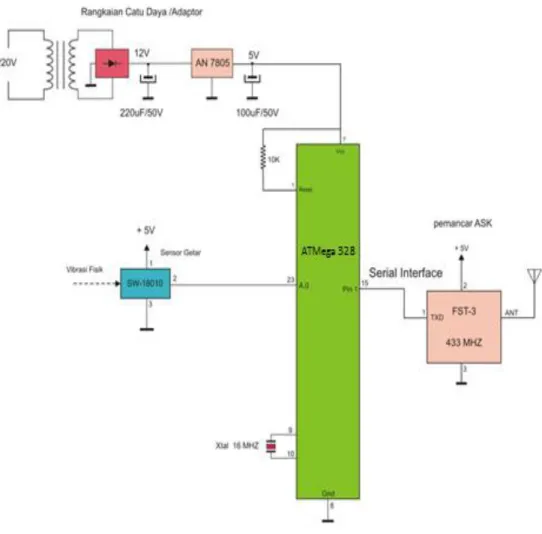
3.2.1 Rangkaian Pemancar
Pemancar merupakan kombinasi sensor MPU6050 yang dihubungkan dengan Atmega328 melalui port A0. Data sensor diakses secara periodik oleh mikrokontroler dan dikirimkan ke penerima melalui pin 1 serial interface ke FST-1000 yang merupakan transmitter ASK pada kanal 433 MHz Gambar 3.2.
Universitas Sumatera Utara
Gambar 3.2.Rangkaian Pemancar
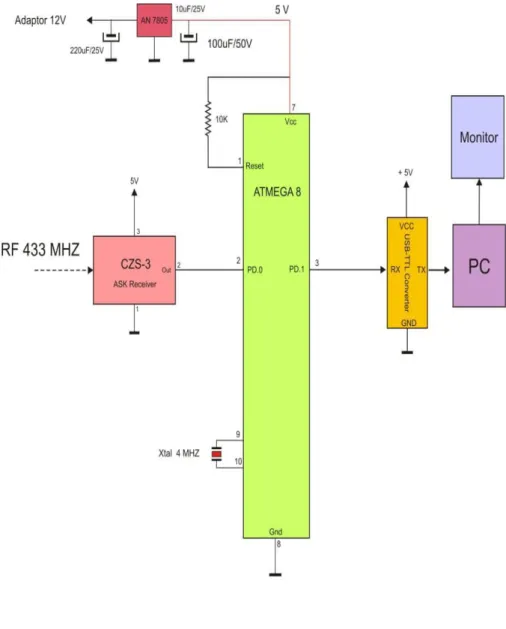
3.2.2 Rangkaian Penerima
Pada penerima, sinyal ASK ditangkap oleh CZS-3 yang dikirimkan ke mikrokontroler ATMega8 melalui port pin digital 0 dan dikirimkan ke computer melalui USB to TTL converter. Data diterima dengan aplikasi PLX-DAQ dan ditampilkan pada aplikasi Microsoft Excel (Gambar 3.3). Kedua kristal pada
21
pemancar dan penerima memberikan detak mikrokontroller dengan kecepatan 16 MHz pada pemancar dan 4 MHz pada penerima.
Gambar 3.3.Rangkaian penerima
Universitas Sumatera Utara
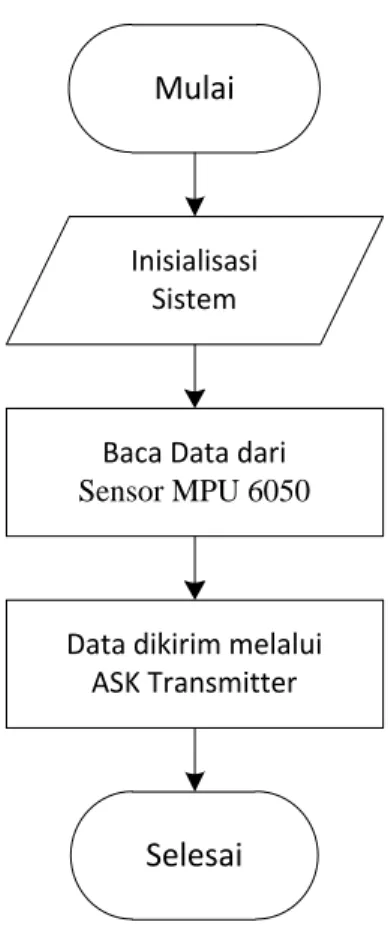
3.4. Perangkat Lunak
Piranti lunak pada mikrokontroler ATmega328 didesain mengikuti diagram alir pada Gambar 3.4. Mikrokontroler secara periodik mengakses data sensor dan mengirimkannya melalui radio 433 MHz untuk mendapatkan hasil yang ditampilkan pada komputer. Kode program terlampir pada Lampiran 1.
Mulai
Inisialisasi Sistem
Baca Data dari Sensor MPU 6050
Data dikirim melalui ASK Transmitter
Selesai
Gambar 3.4. Diagram alir piranti lunak pemancar
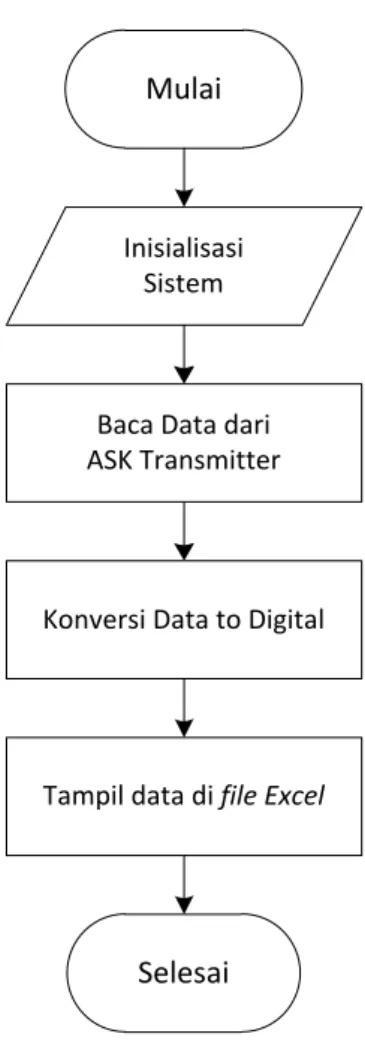
Sementara piranti lunak pada radio penerima ditunjukkan pada Gambar 3.5.
Mikrokontroller secara terus menerus memerintahkan ASK receiver memeriksa sinyal 433 MHz dan menterjemahkan data dan dikirimkan ke komputer. Kode program ditunjukkan pada Lampiran 2.
23
Mulai
Inisialisasi Sistem
Baca Data dari ASK Transmitter
Konversi Data to Digital
Tampil data di file Excel
Selesai
Gambar 3.5. Diagram piranti lunak Atmega8
3.5. Perangkat Pengujian Sensor
Secara keseluruhan, proses sistem pendeteksi geteran ini dimulai dari pembacaan data sensor dengan masukan berupa getaran yang ditimbulkan dari benda yang dijatuhkan dari ketinggian yang sama dengan berat benda jatuh yang berbeda- beda dari setiap pengujian. Sensor MPU 6050 akan membaca pergerakan yang terjadi, dan hasilnya dikirimkan melalui gelombang radio untuk dapat dilihat pada perangkat penerima yang telah terhubung ke komputer sebagai media penampil.
Universitas Sumatera Utara
Gambar 3.6 menunjukkan desain penguji sensor. Beban dengan massa 3 kg, 6 kg, dan 9 kg digunakan untuk menguji sensitifitas sensor.
h = Tinggi gaya penyebab getaran Meja
m = berat benda penyebab getaran
Sensor
Jarak sensor dengan sumbu getaran
Aluminium
Gambar 3.6. Sketsa pengujian
3.6. Pengujian Radio 433 MHz
Pengujian koneksi 433 MHz adalah dengan variasi jarak pemencar dan penerima sampai jarak 20 m dan ukuran data hingga 30 kbyte. Pengujian dilakukan untuk memastikan kemampuan koneksi radio terhadap jarak LOS (line off sigth) juga kemampuan pengiriman data.
25
Pengujian radio frekuensi 433MHz dilakukan untuk mengetahui apakah modul radio frekuensi 433MHz dapat berfungsi dengan baik atau tidak. Pada pengujian yang dilakukan menggunakan 2 (dua) mikrokontroler. Mikrokontroler 1 tersebut bertugas menjadi transmitter dan mikrokontroler 2 bertugas sebagai receiver.
Sensor
Getaran Mikrokontroler 1 Modul RF 433 MHZ Transmitter
Modul RF 433 MHZ Receiver
Mikrokontroler 2
Serial Monitor
Sistem Transmitter Sistem Receiver
Gambar 3.7. Blok diagram pengujian modul radio frekuensi 433 MHz
Pada Gambar 3.7 dapat dijelaskan bila sensor getar telah diaktifkan maka mikrokontroler 1 akan mengolah data, selanjutnya data tersebut akan dikirimkan menggunkan modul RF 433 MHz transmitter. Setelah itu modul RF 433 MHz receiver akan menerima data tersebut. Selanjutnya data yang sudah di terima akan diproses oleh mikrokontroler. Setelah itu data akan ditampilkan pada serial monitor software arduino IDE. Berikut merupakan data yang hasilkan dari pengujian modul radio frekuensi 433 MHz yang dapat dilihat pada Gambar 3.8.
Universitas Sumatera Utara
Gambar 3.8. Hasil pengujian modul radio frekuensi 433 MHz
Pada Gambar 3.8. percobaan dilakukan sebanyak 100 kali pada jarak 1 meter.
Adapun hasil yang didapat yaitu Modul Radio Frekuensi 433MHz mampu mentransmisikan dan menerima data. Data-data tersebut merupakan data yang sudah diatur pada mikrokontroler1.
Selain menguji keberhasilan modul RF 433 MHz dalam mentransmisikan dan menerima data, penulis juga melakukan pengukuran jarak keberhasilan modul RF 433 MHz dalam mentransmisikan data. Pengukuran ini untuk mendapatkan hasil seberapa jauh modul RF 433 MHz mampu mentransmisikan data. Berikut merupakan hasil dari pengukuran jarak modul RF 433 MHz dalam mentransmisikan data yang dapat dilihat pada Tabel 3.1.
27
Tabel 3.1. Hasil pengukuran jarakmodul RF 433 MHz dalam mentransmisikan data
Jarak (Meter) Keterangan (Data)
1 Dapat ditransmisikan
2 Dapat ditransmisikan
3 Dapat ditransmisikan
4 Dapat ditransmisikan
5 Dapat ditransmisikan
6 Dapat ditransmisikan
7 Dapat ditransmisikan
8 Dapat ditransmisikan
9 Dapat ditransmisikan
10 Dapat ditransmisikan
11 Dapat ditransmisikan
12 Dapat ditransmisikan
13 Dapat ditransmisikan
14 Dapat ditransmisikan
15 Dapat ditransmisikan
16 Dapat ditransmisikan
17 Dapat ditransmisikan
18 Dapat ditransmisikan
19 Dapat ditransmisikan
20 Dapat ditransmisikan
21 Dapat ditransmisikan (tidak stabil) 22 Tidak dapat ditransmisikan
Pada Tabel 3.1 pengujian dan pengukuran dilalukan pada subuah ruangan yang sama atau ruangan terbuka. Adapun hasil yang didapat yaitu modul RF 433 MHz mampu mentransmisikan data dengan baik pada jarak 20 meter. Pada jarak 21 meter modul RF 433 MHz mampu mentransmisikan data tetapi tidak stabil dan data sering hilang. Sedangkan pada jarak 22 meter Modul RF sudah tidak mampu mentransmisikan data. Pengujian ini dilakukan pada ruangan terbuka.
Universitas Sumatera Utara
BAB 4
PENGUJIAN DAN ANALISIS HASIL UJI
4.1 Hasil Rancangan Alat
Gambar 4.1 menunjukkan hasil rancangan pemancar dan penerima serta peralatan pengujian. Sensor diletakkan pada permukaan alumunium. Beban dijatuhkan dari ketinggian tertentu.
Gambar 4.1.Proses pengujian rangkaian dan pengambilan data Penerima
Pemancar Sensor Beban 3 kg
29
Gambar 4.2. Sumbu sensitivitas akselerasi
Pengujian karakteristik sensor MPU 6050 dilakukan dengan mengukur data keluaran pada 3 sumbuh x, y, z seperti terlihat paada Gambar 4.2. Pengukuran sensitifitas sensor menggunakan 2 jenis material sebagai landasan penyalur getaran yaitu keramik dan aluminium. Masing-masing percobaan terhadap material juga memiliki jarak yang berbeda antara titik beban saat dijatuhkan dengan letak sensor getaran diletakkan. Beban yang dijatuhkan adalah batu bata yang memiliki ukuran:
panjang 18 cm, lebar 9 cm, tebal 4 cm dan berat rata-rata adalah 3 kg per batu bata.
4.2 Hasil Pengujian Efektifitas Sensor
Adapun hasil pengujian tersebut meliputi pengujian pada kondisi normal atau tanpa beban, respon sumbu x, y, z dan resultan, pengaruh dari sumber getaran, pengaruh dari bahan lantai, pengaruh jarak sensor dengan titik beban dijatuhkan, dan
Universitas Sumatera Utara
pengaruh periode pengiriman data sensor. Sementara pengaruh jarak dengan beban radio dilakukan secara terpisah.
4.2.1 Pengujian pada kondisi tanpa beban
Pengujian pendeteksian getaran tanpa beban dilakukan dengan posisi sensor berada di atas lempengan alumunium dengan jarak sensor 2 cm, tidak ada pergerakan dalam radius 10 m dan tidak terdapat lintasan kendaraan terlihat di lingkungan pengukuran. Data yang ditunjukkan pada Tabel 4.1 merupakan nilai absolut dari hasil pengukuran sensor pada serial monitor. Untuk data mentah pengukuran dapat dilihat pada Lampiran 3.
Tabel 4.1. Pengukuran kondisi tanpa beban Sampel Sumbu satuan g
Resultan
x y z
1 0,02 0,01 1,01 1,010247
2 0,02 0,01 1,01 1,010247
3 0,01 0,01 1,01 1,010099
4 0,01 0 1,02 1,020049
5 0,01 0,01 1,01 1,010099
6 0,01 0,01 1,01 1,010099
7 0,01 0,01 1,01 1,010099
8 0,01 0,01 1,02 1,020098
9 0,01 0 1,01 1,010050
10 0,01 0,02 1,01 1,010247
Rata-rata 0,012787 0,010328 1,011639 1,011788
31
Gambar 4.3. Grafik kondisi tanpa beban
Tanpa beban, simpangan maksimum yang terjadi pada sumbu x, y, z berkisar pada nilai 1,02 g seperti ditunjukkan pada Gambar 4.3, dengan sumbu z mendominasi nilai tertinggi.
Gambar 4.4.Perbandingan sumbu x, y, z, dan resultan
0 0.2 0.4 0.6 0.8 1 1.2
1 2 3 4 5 6 7 8 9 1011121314151617181920
Percepatan (g)
Sampel Data
sumbu x sumbu y sumbu z Resultan
0.0128 0.0103
1.0116 1.0118
0 0.2 0.4 0.6 0.8 1 1.2
x y z Resultan
Percepatan (g)
Komponen sumbu getaran dan resultan
Universitas Sumatera Utara
Secara rata-rata, nilai simpangan terbesar adalah pada sumbu z sebesar 1,0117 g, sekitar 78 dan 97 kali lebih besar dari pada sumbu x dan y (Gambar 4.4).
Hal ini menunjukkan efek getaran terbesar adalah pada arah vertikal.
4.2.2 Respon sensor terhadap getaran
Tabel 4.2 menunjukkan sampel respons masing-masing sumbu saat getaran terjadi. Nilai-nilai x, y dan z merupakan perubahan getaran dari kondisi statis atau tanpa sumber getaran. Pada percobaan yang dilakukan, satu buah batu dijatuhkan pada permukaan aluminium. Tabel 4.2 merupakan hasil absolut selisih dari pengukuran dengan beban yang dijatuhkan (Lampiran 4) dengan hasil pengukuran tanpa beban. Getaran menyebabkan simpangan maksimun hingga 1,57 g.
Tabel 4.2. Tabel respon sumbu xyz dan resultan Sampel Sumbu satuan g
Resultan
x y z
1 0.09 0.02 0.02 0.094340
2 0.09 0.03 0.03 0.099499
3 0.09 0.03 0.03 0.099499
4 0.09 0.03 0.03 0.099499
5 0.10 0.03 0.01 0.104881
6 0.10 0.02 0.02 0.103923
7 0.10 0.03 0.02 0.106301
8 0.10 0.03 0.02 0.106301
9 0.10 0.03 0.01 0.104881
10 0.07 0.01 1.02 1.022448
11 0.13 0 1.57 1.575373
12 0.19 0.05 0.04 0.200499
13 0.20 0.04 0.05 0.210000
14 0.19 0.04 0.05 0.200499
15 0.19 0.04 0.04 0.198242
16 0.19 0.04 0.04 0.198242
33
Tabel 4.2. Tabel respon sumbu xyz dan resultan (lanjutan)
Sampel Sumbu satuan g Resultan
x y z
16 0.19 0.04 0.04 0.198242
17 0.20 0.04 0.05 0.210000
18 0.20 0.04 0.05 0.210000
22 0.20 0.05 0.05 0.212132
23 0.20 0.05 0.05 0.212132
24 0.19 0.04 0.04 0.198242
25 0.19 0.04 0.05 0.200499
26 0.19 0.04 0.04 0.198242
27 0.20 0.04 0.04 0.207846
28 0.20 0.04 0.06 0.212603
29 0.20 0.05 0.05 0.212132
30 0.20 0.05 0.05 0.212132
31 0.20 0.04 0.04 0.207846
32 0.20 0.04 0.05 0.210000
33 0.20 0.03 0.04 0.206155
34 0.20 0.05 0.03 0.208327
35 0.19 0.04 0.04 0.198242
36 0.20 0.05 0.05 0.212132
37 0.19 0.04 0.06 0.203224
38 0.19 0.05 0.04 0.200499
39 0.19 0.04 0.06 0.203224
40 0.19 0.04 0.05 0.200499
41 0.19 0.05 0.05 0.202731
42 0.20 0.04 0.05 0.21000
43 0.19 0.04 0.05 0.200499
44 0.20 0.04 0.04 0.207846
45 0.20 0.03 0.04 0.206155
46 0.20 0.05 0.03 0.208327
47 0.20 0.05 0.04 0.210000
48 0.20 0.05 0.05 0.212132
49 0.19 0.05 0.04 0.200499
50 0.19 0.04 0.04 0.198242
51 0.19 0.04 0.05 0.200499
52 0.19 0.04 0.05 0.200499
Rata-rata 0.17 0.04 0.09 0.199832
Universitas Sumatera Utara
Respons terbesar masih pada sumbu z dengan puncak getaran mencapai hampir 1,6 g (Gambar 4.5). Resultan ketiga sumbu diperlihatkan pada Gambar 4.6.
Gambar 4.5.Grafik percepatan sumbu xyz
Gambar 4.6.Grafik percepatan resultan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55
Percepatan (g)
Sampel Data
Sumbu x Sumbu y Sumbu z
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55
Percepatan (g)
Sampel Data
35
Secara rata-rata, nilai simpangan terbesar adalah pada sumbu z sebesar 0,1756 g, sekitar 50,4% dan 78% lebih besar dari pada sumbu x dan y (Gambar 4.7). Nilai ini menjadi tidak signifikan jika data sampel jauh lebih banyak dari pada sampel yang memiliki nilai maksimum.
Gambar 4.7. Nilai rata-rata percepatan saat terjadi getaran
4.2.3 Pengaruh sumber getaran
Sumber getaran dari pengujian ini adalah dengan menjatuhkan beban dengan berat yang berbeda-beda. Beban tersebut berupa batu bata yang memiliki berat rata- rata 3 kg. Pada pengukuran ini menghasilkan data dari 3 macam berat beban yaitu 3 kg, 6 kg, dan 9 kg yang dijatuhkan pada dasar yang berbahan aluminium (Lampiran 5). Gambar 4.8. menunjukkan nilai respons sensor terhadap beban yang semakin
0.1756
0.0387
0.0871
0.1998
0 0.05 0.1 0.15 0.2 0.25
x y z Resultan
Percepatan (g)
Komponen
Universitas Sumatera Utara
besar, sementara Gambar 4.9. menunjukkan rata-rata resultan getaran terhadap ketiga beban.
Gambar 4.8. Pengukuran dengan beban 3 kg, 6 kg, dan 9 kg
Gambar 4.9. Getaran rata-rata dengan beban 3 kg, 6 kg, dan 9 kg
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
1 3 5 7 9 11131517192123252729313335373941434547495153
Percepatan (g)
Sampel Data
3 kg6 kg
12.1401
15.1687 15.2584
0 2 4 6 8 10 12 14 16 18
3 6 9
Percepatan (g)
Massa beban (kg)
37
Resultan getaran naik jika massa beban naik. Kenaikan nilai getaran tidak linier disebabkan selisih 3kg dan 6kg lebih besar dari selisi 6 kg dan 9kg.
Ketidaklinieran kemungkinan disebabkan tidak homogennya distribusi beban ke landasan saat beban jatuh.
4.2.4 Pengaruh bahan lantai
Ada dua jenis lantai yang dipakai sebagai landasan sensor untuk menjatuhkan beban yaitu keramik dan aluminium. Dari masing-masing bahan memiliki hasil pengukuran yang berbeda. Tabel 4.3. merupakan resultan dari pengukuran sumbu x, y dan z dari bahan aluminium dan keramik yang digunakan.
Tabel 4.3. Pengukuran pengaruh bahan landasan sensor Sampel Aluminium Keramik
1 0.094339811 0.024494897 2 0.099498744 0.014142136 3 0.099498744 0.014142136 4 0.099498744 0.022360680 5 0.104880885 0.020000000 6 0.103923048 0.024494897 7 0.106301458 0.024494897 8 0.106301458 0.024494897 9 0.104880885 0.030000000 10 1.022448043 0.020000000 11 1.575372972 0.024494897 12 0.200499377 0.033166248 13 0.210000000 0.072801099
Universitas Sumatera Utara
Tabel 4.3. Pengukuran pengaruh bahan landasan sensor (lanjutan) Sampel Aluminium Keramik
14 0.200499377 0.024494897 15 0.198242276 0.037416574 16 0.198242276 0.030000000 17 0.210000000 0.030000000
18 0.21 0.017320508
19 0.207846097 0.024494897 21 0.207846097 0.024494897 20 0.196468827 0.022360680 28 0.212602916 0.024494897 29 0.212132034 0.024494897 30 0.212132034 0.024494897 31 0.207846097 0.014142136 Rata-rata 0.246141816 0.025429927
Gambar 4.10. Pengaruh bahan landasan sensor
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31
Percepatan (g)
Sampel Data
Aluminium Keramik
39
Gambar 4.10 menunjukkan secara jelas bahwa aluminium lebih baik dalam mendistribusikan getaran atau meneruskan getaran dan sumber getaran ke sensor dari pada keramik. Secara rata-rata, aluminium menyalurkan 0,2207 g (8,69 kali) lebih tinggi dari pada keramik.
Gambar 4.11. Nilai getaran bahan landasan sensor
4.2.5 Pengaruh jarak sensor dengan titik beban dijatuhkan
Pada proses pengukurannya, jarak sensor diletakan sejauh 2 cm dan 10 cm dari titik beban dijatuhkan dengan bahan tempat beban dijatuhkan menggunkan material aluminium. Semakin jauh sensor dari letak titik jatuh, semakin kecil nilai getaran yang dihasilkan. Gambar 4.12 menunjukkan respons sensor terhadap jarak.
Secara rata-rata getaran pada jarak 2 cm lebih besar 48,8% dari pada jarak 10 cm seperti terlihat pada Gambar 4.13.
0.2461
0.0254 0
0.05 0.1 0.15 0.2 0.25 0.3
Aluminium Keramik
Percepatan (g)
Material
Universitas Sumatera Utara
Gambar 4.12. Pengukuran jarak 2 cm dan 10 cm dari beban jatuh
Gambar 4.13.Pengaruh jarak terhadap getaran
Sampel Data
41
4.2.6 Pengaruh periode
Gambar 4.14 menunjukkan pengaruh periode pengambilan data terhadap nilai rata-rata getaran. Terlihat bahwa semakin banyak pengambilan data dilakukan, semakin banyak data gerataran yang masksimum yang terekam. Sehingga memberikan rerata yang lebih tinggi dapat dilihat pada Gambar 4.15.
Gambar 4.14. Pengaruh periode terhadap getaran
0 0.5 1 1.5 2 2.5 3 3.5
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45
Percepatan (g)
Sampel Data
Periode 150 ms Periode 200 ms periode 250 ms
Universitas Sumatera Utara
Gambar 4.15.Nilai rata-rata getaran terhadap periode
43 BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil pengujian sensitifitas sensor getaran MPU 6050 dapat diperoleh kesimpulan:
1. Sensor memiliki 3 sumbu pendeteksian getaran, dimana sumbu z memiliki sensitifitas mencapai 78 dan 97 kali dari sumbu x dan y.
2. Kondisi ada dan tiada getaran menghasilkan mencapai 1,6 g. Getaran yang terdeteksi akan semakin besar jika sumber getaran meningkat namun tidak bersifat linier.
3. Getaran akan semakin terasa jika bahan dasar perambatan getaran terbuat dari alumunium. Getaran mencapai 8,69 kali lebih besar dari bahan keramik.
4. Jika sensor lebih dekat ke sumber, getaran akan semakin terasa. Getaran pada jarak 2 cm 48,8% kali lebih besar dari jarak 10 cm.
5. Getaran terjadi bersifat lecutan dan tidak kontinu sehingga semakin sering pengambilan data dilakukan, semakin baik pendeteksian getaran. Hal ini ditunjukkan oleh kenaikan nilai percepatan getaran jika periode naik. Nilai percepatan rata-rata mencapai 0, 1564 g saat periode pengambilan data 150 mili detik, lebih tinggi dari jika periode 200 dan 250 mili detik yang memberikan nilai 0,1491 g dan 0,1049 g.
Universitas Sumatera Utara
5.2 Saran
Berdasarkan pengujian dan analisa yang telah dilakukan, maka saran yang dapat diberikan antara lain:
1. Mengingat sulitnya mengukur nilai getaran terhadap kejadian alam seperti gempa, hendaknya dilakukan perbaikan dalam penentuan sumber getaran yang lebih mempresentasikan kejadian yang diamati.
2. Untuk mendapatkan hasil yang lebih akurat, sebaiknya sensor getar menggunakan rekayasa mekanika agar getaran dari sumber getaran lebih terasa ke dalam pembacaan sensor.
3. Untuk mengamati gempa yang lebih akurat, maka disarankan jumlah dari node sensor lebih diperbanyak untuk penentuan besar dan letak titik terjadinya gempa.
45
DAFTAR PUSTAKA
[1] Noor, D. (2006). Geologi Lingkungan. Jogyakarta: Gaha Ilmu.
[2] Suraya, Novianta, M. A. (2013). Prototipe Deteksi Gempa Menggunakan Metode Perambatan Gelombang Pada Sensor Getar Berbasis Mikrokontroler Dengan Informasi Sms Gateway. Simposium Nasional RAPI XII-2013 FT UMS. Yogyakarta.
[3] Chen, J., Li, P., Song, G., & Ren, Z. (2016). Piezo-based Wireless Sensor Network for Early-age Concrete Strength Monitorng. Optik 127, 2983- 2987.
[4] Croston, B. (2012). General Purpose Input/Output Raspberry Pi Education Manual.
[5] Elnashai, A. S., & Sarno, L. D. (2008). Fundamentals of Earthquake Engineering. John Wiley & Sons, Ltd.
[6] Fadilah, F., Paniran, & W., G. W. (2015, Pebruari). Rancang Bangun Sistem Pengunci Pintu Otomatis menggunakan Pendeteksi Getaran Ketukan.
Dielektrika, SSN 2086-9487 , 2, 67-76.
[7] Johnson, C. (1993). Process Control Instrumentatian Technology (Fourth ed.).
New Jersey: Prentice Hall.
[8] Pauzi, G. A., Febriska, M. D., & Supriyanto, A. (2015, Juli). Desain dan Realisasi Sistem Telemetri Getaran dengan Media Transmisi HT Menggunakan Sensor Accelerometer MMA7361 Berbasis Mikrokontroler ATMega8535. Teori dan APlikasi Fisika, 03(02).
[9] Priatama, A. S. (n.d.). Sistem Pemantauan Kondisi Struktur Bangunan Menggunakan Jaringan Sensor Nirkabel . Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS . Surabaya.
[10] Setyawan, F., Fikri, A. A., Fuad, A. N., Rohim, R., & Firmansyah, R. (2017).
Telemetri Flow meter menggunakan RF module 433 MHz berbasis Arduino. Journal of Electrical and Electronic Engineering-UMSIDA.
[11] Syam, R. (2013). Dasar Dasar Teknik Sensor. Makassar: Fakultas Teknik Universitas Hasanuddin.
Universitas Sumatera Utara
Lampiran 1
Program rangkaian pengirim :
#include <MPU6050_tockn.h>
#include <Wire.h>
#include <RH_ASK.h>
#include <SPI.h> // Not actually used but needed to compile MPU6050 mpu6050(Wire);
RH_ASK driver;
String pesan;
void setup() {
Serial.begin(9600); // Debugging only Serial.println("mulai kirim data");
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
if (!driver.init()){
Serial.println("init failed");
}
47
}
void loop() {
mpu6050.update();
delay(250);
double x = mpu6050.getAccX();
double y = mpu6050.getAccY();
double z = mpu6050.getAccZ();
pesan = String(x) + "x" + y + "y" + z + "z";
Serial.println(pesan);
//const char *msg = "Hello World!";
//driver.send((uint8_t *)msg, strlen(msg));
driver.send(pesan.c_str(), pesan.length());
driver.waitPacketSent();
//delay(1000);
}
Universitas Sumatera Utara
Lampiran 2
Program rangkaian penerima :
#include <RH_ASK.h>
#include <SPI.h> // Not actualy used but needed to compile //SoftwareSerial mySerial(7, 6); // RX, TX
RH_ASK driver;
String pesan;
String pesanX, pesanY, pesanZ;
int x, y, z;
void setup() {
Serial.begin(9600); // Debugging only Serial.println("CLEARDATA");
Serial.println("LABEL,Time,PosisiX,PosisiY,PosisiZ");
if (!driver.init())
Serial.println("init failed");
//Serial.println("Terima data");
}
void loop() {
49
uint8_t buf[20];
uint8_t buflen = sizeof(buf);
if (driver.recv(buf, &buflen)) // Non-blocking {
pesan = String((char*)buf);
x = pesan.indexOf('x');
y = pesan.indexOf('y');
z = pesan.indexOf('z');
pesanX = pesan.substring(0,x);
pesanY = pesan.substring(x+1,y);
pesanZ = pesan.substring(y+1, z);
Serial.print("DATA,TIME,");
Serial.print(pesanX);
Serial.print(",");Serial.print(pesanY);Serial.print(",");
Serial.println(pesanZ);
} }
Universitas Sumatera Utara