KLASIFIKASI GERAKAN TANGAN MENGGUNAKAN MYO GESTURE CONTROL ARMBAND DAN METODE ARTIFICIAL
NEURAL NETWORK
SKRIPSI
ANDIKA PRASETYO
141402051
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
MEDAN 2020
KLASIFIKASI GERAKAN TANGAN MENGGUNAKAN MYO GESTURE CONTROL ARMBAND DAN METODE ARTIFICIAL
NEURAL NETWORK
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Teknologi Informasi
ANDIKA PRASETYO
141402051
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
MEDAN 2020
ii
KLASIFIKASI GERAKAN TANGAN MENGGUNAKAN MYO GESTURE CONTROL ARMBAND DAN METODE ARTIFICIAL
NEURAL NETWORK
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Januari 2020
ANDIKA PRASETYO 141402051
iv
UCAPAN TERIMA KASIH
Puji dan syukur kehadirat Tuhan Yang Maha Esa, Karena atas berkat dan izin-Nya penulis dapat menyelesaikan skripsi ini sebagai syarat kelulusan dan memperoleh gelar Sarjana dari Program Studi Teknologi Informasi Universitas Sumatera Utara.
Banyak rasa terima kasih yang ingin penulis ucapkan kepada seluruh pihak yang turut serta terlibat dalam masa perkuliahan dan masa pengerjaan skripsi ini hingga selesai :
1. Bapak Prof. Runtung Sitepu, SH., M.Hum., selaku Rektor Universitas Sumatera Utara.
2. Bapak Prof. Dr. Drs. Opim Salim Sitempul, M.Sc., selaku Dekan Fasilkom-TI Universitas Sumatera Utara.
3. Bapak Romi Fadillah Rahmat, B.Comp.Sc., M.Sc., selaku Ketua Program Studi S1 Teknologi Informasi Universitas Sumatera Utara.
4. Bapak Faly Syah Putra, B.Sc., M.Sc., selaku Dosen Pembimbing 1 yang telah meluangkan waktu untuk memberikan bimbingan, ide, dan saran kepada penulis skripsi ini dapat terselesaikan.
5. Bapak Baihaqi Siregar, S.Si., M.T., selaku Dosen Pembimbing 2 yang telah meluangkan waktu untuk memberikan bimbingan, ide, dan saran kepada penulis skripsi ini dapat terselesaikan.
6. Bapak Indra Aulia, S.TI., M.Kom., selaku Dosen Pembanding 1 yang telah memberikan kritik dan saran untuk penyempurnaan skripsi ini.
7. Bapak Romi Fadillah Rahmat, B.Comp.Sc., M.Sc., selaku Dosen Pembanding 2 yang telah memberikan kritik dan saran untuk penyempurnaan skripsi ini.
8. Seluruh dosen Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara yang telah memberikan ilmu, serta Pendidikan pada penulis hingga dapat menunjang dalam penyelesaian skripsi ini. Serta staff akademik yang telah membantu kelancaran penulis dalam menyelesaikan studi.
9. Orangtua penulis, yaitu Bapak Wagianto dan Ibu Murniati Ningsih untuk cinta, perhatian, doa dan dukungan moral maupun materil yang telah diberikan kepada penulis.
10. Adik tercinta penulis, Dicky Dwi Wardana dan Geby Tri Istihaza, yang selalu
penulis untuk dapat menyelesaikan studi S1 .
12. Keluarga Spotipai yang telah membantu dalam dan memberikan dukungan selama penulisan ataupun pengerjaan penulis untuk menyelesaikan studi.
13. Teman-Teman Teknologi Informasi Angkatan 2014 yang telah memberikan ilmunya untuk saling berbagi dan membantu dalam penyelesaian skripsi penulis.
14. Penghuni Lab Multimedia yang telah memberikan dukungan dan ceritanya untuk membuat susasana lebih baik dalam penulisan skripsi penulis.
15. Teman Penulis, Farin Aulia, S.Kom dan Muhammad Noor Misyuari yang telah memberikan solusi dalam pembuatan dan pengerjaan skripsi penulis.
16. Semua pihak yang telibat langsung maupun tidak langsung yang tidak dapat penulis ucapkan satu persatu yang telah membantu penyelesaian skripsi ini.
vi
ABSTRAK
Gerakan tangan manusia memiliki peran yang penting dalam berinteraksi. Pengenalan gerakan tangan manusia saat ini merupakan area aktif dalam penelitian untuk interaksi manusia dan komputer. Dalam penelitian ini, penulis melakukan klasifikasi gerakan tangan dengan menggunakan alat yang bernama MYO Gesture Control Armband dan menggunakan metode Artificial Neural Network, yang dimana metode tersebut sangat cocok sekali untuk mengklasifikasikan gerakan tangan dan ANN sendiri mengadopsi mekanisme beripikir yang merupai otak manusia, baik untuk pemprosesan berbagai sinyal elemen yang diterima, toleransi terhadap kesalahan/eror, dan juga paralel processing. Dalam penelitian ini, ada lima gerakan yang digunakan. Dilakukan pengujian dengan kasus yang berbeda-beda didapat nilai akurasi persentase tertinggi yaitu 97,3%. Besar kecilnya gerakan yang dapat diklasifikasikan tergantung aktivitas pada pengguna.
Kata kunci: Myo Armband, ANN, klasifikasi, Hand Gesture, hand movement, artificial neural Network
Classification of Hand Movements Using Myo Gesture Control Armband and Artificial Neural Network (ANN)
ABSTRACT
Human hand movements have an important role in interacting. The introduction of human hand movements is currently an active area in research for human and computer interaction. In this study, the authors classify hand movements using a tool called MYO Gesture Control Armband and use the Artificial Neural Network method, which method is very suitable for classifying hand movements and ANN itself adopts a thinking mechanism that resembles the human brain, both for processing various signal elements received, error / error tolerance, and also parallel processing. In this study, there are five movements used. Tested with different cases obtained the highest percentage of accuracy is 97.3%. The size of the movement that can be classified depends on the user's activity.
Keywords :Myo Armband, ANN, classification, Hand Gesture, hand movement, artificial mural Networks.
viii
DAFTAR ISI
Halaman
PERSETUJUAN ii
PERNYATAAN iii
UCAPAN TEIMAKASIH iv
ABSTRAK vi
ABSTRACT vii
DAFTAR ISI viii
DAFTAR TABEL x
DAFTAR GAMBAR xi
BAB 1 PENDAHULUAN
1.1 Latar Belakang Penelitian 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan Penelitian 3
1.5 Manfaat penelitian 3
1.6 Metodologi Penelitian 3
1.7 Sistematika Penulisan 4
BAB 2 LANDASAN TEORI
2.1 Myo Gesture Control Armband 6
2.2 EMG (Elektromyography) 7
2.2.1. Karakteristik
2.3 Artificial Neural Network 9
2.4 Klasifikasi 11
2.5 Backpropagation 11
2.6 Machine Learning 13
2.7 Motorik 14
2.7.1 Pembagian Keterampilan Motorik 14
2.7.2 Motorik Halus 14
2.7.3 Faktor yang Mempengaruhi Motorik Halus 15
BAB 3 ANALISIS DAN PERANCANGAN
3.1 Data 21
3.2 Analisis Sistem 22
3.2.1 Input 25
3.2.2 Recognition 25
3.2.3 Classification 27
3.2.4 Output 31
3.2.5 Hasil Evaluasi 32
3.3 Perancangan Antarmuka Sistem 32
BAB 4 IMPLEMENTASI DAN PENGUJIAN SISTEM
4.1 Kebutuhan Sistem 37
4.1.1 Perangkat Keras 37
4.1.2 Perangkat Lunak 37
4.2 Implementasi Perancangan Antarmuka 38
4.2.1 Tampilan Halaman Utama/Beranda 38
4.2.2 Tampilan Halaman Aplikasi 38
4.2.3 Tampilan Halaman Menu Tentang 38
4.2.4 Tampilan Halaman Profil 40
4.3 Implementasi Data 41
4.4 Prosedur Operasional 42
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan 53
5.2 Saran 53
DAFTAR PUSTAKA
x
DAFTAR TABEL
Hal
Tabel 2.1 Penelitian Terdahulu 18
Tabel 4.1 Perincian Data Yang Digunakan Dalam Penelitian 36 Tabel 4.2 Pengujian tahap 1 dengan penderita Autism yang
berumur 16 Tahun 43
Tabel 4.3 Pengujian Tahap 2 Dengan Pengguna Yang Mempunyai
Massa Otot yang Lebih Besar Dari Otot Normal 44 Tabel 4.4 Pengujian Tahap 3 Dengan Pengguna Yang Mempunyai
Kelemahan Terhadap Sistem Saraf 46
Hal.
Gambar 2.1. Penggunaan Myo Gesture Control Armband dan Perangkat 6 Gambar 2.2. Mekanisme Pembangkitan Gerakan Otot 8 Gambar 2.3. Neuron Secara Biologi dan Representasinya dalam ANN 10 Gambar 3.1. Data Hand Gesture Dengan Format CSV
(Comma Separated Value) 21
Gambar 3.2. Arsitektur Umum 22
Gambar 3.3. Contoh EMG Data sebelum di cleaning 24 Gambar 3.4. Contoh EMG Data sesudah di cleaning 24 Gambar 3.5. Pseudocode Untuk Proses Cleaning Pada EMG Data 25
Gambar 3.6. Struktur Antarmuka Sistem 27
Gambar 3.7. Rancangan Halaman Utama 28
Gambar 3.8. Rancangan Halaman Aplikasi 29
Gambar 3.9. Rancangan Halaman Tentang 30
Gambar 3.10. Rancangan Halaman Profil 31
Gambar 4.1 Tampilan Beranda 33
Gambar 4.2. Tampilan Menu Aplikasi dan Submenu 34
Gambar 4.3. Tampilan Submenu Prediction Gesture 34 Gambar 4.4. Tampilan Submenu Grafik Perkembangan 35
Gambar 4.5. Tampilan Menu Tentang 35
Gambar 4.6. Halaman Menu Profil 36
Gambar 4.7. Contoh Gerakan Fish 37
Gambar 4.8. Contoh Gerakan Ok 38
Gambar 4.9. Contoh Gerakan Like 38
Gambar 4.10. Contoh Gerakan Rock 39
Gambar 4.11. Contoh Gerakan Spock 39
Gambar 4.12. Tampilan Gerakan Fist Pada Sistem 40
Gambar 4.13. Tampilan Gerakan Ok Pada Sistem 40
Gambar 4.14. Tampilan Gerakan Like Pada Sistem 41
xii
Gambar 4.15. Tampilan Gerakan Rock Pada Sistem 41
Gambar 4.16. Tampilan Gerakan Spock Pada Sistem 42 Gambar 4.17. Tampilan Gerakan Relax atau Gesture 0 dan
Myo Gesture Control Armband dalam keadaan Stand By 42
Gambar 4.18. Tampilan Grafik Perkembangan pada Sistem 43 Gambar 4.19. Grafik Gerakan Yang Terdeteksi Oleh Sistem Dalam
Pengujian 1 44
Gambar 4.20. Grafik Gerakan Yang Terdeteksi Oleh Sistem Dalam
Pengujian 2 45
Gambar 4.21. Pengguna Myo Gesture Control Armband Memiliki
Kelemahan Terhadap Sistem Saraf 45
Gambar 4.22. Grafik Gerakan Yang Terdeteksi Oleh Sistem Dalam
Pengujian 3 46
Gambar 4.23. Pengujian Sistem Terhadap Pakar 47
BAB 1 PENDAHULUAN
1.1. Latar Belakang
Gerakan tangan manusia memiliki peran yang penting dalam berinteraksi. Pengenalan gerakan tangan manusia saat ini merupakan area aktif dalam penelitian untuk interaksi manusia dan komputer. Pengenalan gerakan tangan manusia ini bertujuan untuk mencegah munculnya penyakit-penyakit yang muncul, seperti trigger finger, gorila arm, dll, akibat penggunaan mouse atau keyboard dalam waktu yang lama dan konstan (Bhattetal.,2013).
Pada saat ini semua perkerjaan manusia sudah menggunakan teknologi yang dapat membantu lebih cepat pekerjaan tersebut. ada banyak kegiatan kesaharian kita saat ini, hampir semuanya bergantung pada teknologi. Banyaknya teknologi yang membantu dalam pergerakan tersebut, sampai dalam dunia kesehatan juga menggunakan teknologi tersebut, seperti dalam penanganan operasi, dll. Teknologi pengenalan tangan sekarang sangat berguna bagi para penyandang disabilitas terutama pada tangan. Pada zaman sekarang para penyandang disabilitas masih menggunakan tangan palsu dan dengan menggunakan tangan robot yang harganya sangat mahal.
2
Semakin berkembangnya teknologi saat ini, membuat semuanya terasa lebih menyenangkan dan mempermudah kegiatan manusia itu sendiri terutama pada bidang kesehatan. Dalam dunia terapi saja, tidak selamanya hanya berharap kepada terapis saja, kita juga membutuhkan teknologi yang dapat membantu terapi tersebut untuk mempercepatnya kesembuhan dari terapi tersebut.
Berdasarkan latar belakang tersebut, maka penulis melakukan penelitian dengan judul “Klasifikasi Gerakan Tangan Menggunakan Myo Gesture Control Armband Dan Artificial Neural Network (ANN)”. Hasil yang diharapkan dari penelitian ini adalah mendapatkan pola gerakan tangan seseorang yang akan digunakan untuk penyandang disabilitas dan penerapan lainnya.
1.2. Rumusan Masalah
Saat ini perkembangan zaman terus berubah, teknologi –teknologi diciptakan untuk membantu pekerjaan manusia lebih mudah dan teknologi sudah digunakan untuk membantu dalam bidang kesehatan dari mulai yang ringan sampai yang berat. Para penyadang disabilitas dan yang memiliki kebutuhan khusus sangat bergantung pada tangan palsu dan tangan robot yang harganya sangat mahal. Maka dari itu diperlukan sebuah alat yang dapat membantu gerak motorik para penyandang disabilitas. Dalam hal kehidupan sehari hari juga, banyak dari kita sangat membutuhkan teknologi tersebut untuk mendapatkan kemudahan dalam pekerjaan.
1.3. Batasan Masalah
Adapun batasan masalah dari penelitian ini adalah :
1. Dataset yang digunakan sebanyak 1.651.576 EMG data.
2. Gerakan yang digunakan yaitu : Ok, Fist, Like, Rock, dan Spock.
3. Program ini hanya dapat dijalankan pada sistem operasi Mac OS.
4. Program ini berbasis Web.
1.4. Tujuan Penelitian
Tujuan dari penelitian ini adalah membantu para penyandang disabilitas dalam melatih gerak motorik menggunakan Myo Gesture Control Armband sehingga mereka dapat melakukan aktivitas seperti orang normal pada umumnya dan membantu merak melakukan gerakan yang dapat dilakukan oleh manusia normal pada umumnya.
Manfaat dari penelitian ini adalah :
a. Mengaplikasikan Myo Gesture Control Armband untuk pengenalan pola gerakan tangan manusia.
b. Menjadi referensi pengembangan selanjutnya dalam bidang Internet of Thing dan bidang Multimedia.
1.6. Metodologi Penelitian
beberapa tahapan yang akan dilakukan pada penelitian ini adalah : 1. Studi Literature
Pada tahapan ini penulis melakukan studi kepustakaan yaitu proses mengumpulkan bahan sebagai metode pembelajaran yang berkaitan dengan topik penelitian. Literature tersebut dapat berupa buku, jurnal, skripsi, paper, makalah, dan sumber informasi lainnya.
2. Pengambilan Data
Setelah studi literatur dilakukan, penelitian akan dilanjutkan dengan pengambilan data. Data yang digunakan adalah data yang diperoleh dari Myo Gesture Control Armband.
3. Pemberian Label
Dalam tahap ini data yang telah didapatkan dari Myo Gesture Control Armband diberikan label yang bertujuan untuk mengetahui ada beberapa gerakan yang dilakukan.
4. Perancangan
Pada tahap ini dilakukan perancangan arsitektur yang akan digunakan untuk pengumpulan data dan perancangan antar muka. Proses perancangan dilakukan berdasarkan hasil analisis terhadap studi literatur yang telah didapatkan dan dipahami.
4
5. Pembangunan Program
Pada tahap ini dilakukan proses implementasi pengkodean program dalam aplikasi komputer menggunakan bahasa pemrograman yang telah dipilih sesuai dengan analisis dan perancangan yang sudah dilakukan.
6. Uji Coba
Pada tahap ini dilakukan proses pengujian dan percobaan terhadap sistem sesuai dengan kebutuhan yang ditentukan sebelumnya serta memastikan program yang dibuat berjalan seperti yang diharapkan.
7. Penyusunan Laporan
Pada tahap ini dilakukan pembuatan dokumentasi seluruh pengerjaan dari penelitian klasifikasi gerakan tangan menggunakan Myo Gesture Control Armband dan menggunakan metode Artificial Neural Network.
1.7. Sistematika Penulisan
Sistematika penulisan dari skripsi ini terdiri dari lima bagian utama sebagai berikut : Bab 1: Pendahuluan
Bab ini berisi latar belakang, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metodologi dan sistematika penulisan.
Bab 2: Landasan Teori
Bab ini berisi teori-teori yang digunakan untuk memahami permasalahan yang dibahas pada penelitian ini. Teori-teori yang berhubungan dengan klasifikasi, data mining, Artificial Neural Network (ANN).
Bab 3: Analisis dan Perancangan
Bab ini menjabarkan tentang analisis penggunaan Myo Gesture Control Armband dan metode Artificial Neural Network, alur kerja sistem yang akan dibangun dan perancangan sistem yang dibuat dan juga perancangan antarmuka sistem.
Bab 4: Implementasi dan Pengujian
Bab ini berisi pembahasan tentang implementasi dari analisis dan perancangan yang telah disusun pada Bab 3. Selain itu, pada bab ini juga dipaparkan hasil dari pengujian sistem yang telah dibangun.
Bab 5: Kesimpulan dan Saran
Bab ini berisi kesimpulan dari seluruh pembahasan pada bab-bab sebelumnya dan saran-saran yang disampaikan untuk pengembangan pada penelitian selanjutnya.
BAB 2
LANDASAN TEORI
2.1. Myo Gesture Control Armband
Myo Armband, dikembangkan oleh startup bernama Thalmic Labs, perangkat inovatif itu memanfaatkan sederet sensor electromyographic (EMG) untuk mendeteksi aktivitas elektrik pada otot-otot di pergelangan tangan. Digabungkan dengan gyroscope, accelerometer dan magnetometer, Myo sanggup menerjemahkan informasi tersebut menjadi gesture tangan yang beragam untuk mengontrol berbagai perangkat; mulai dari komputer, VR headset sampai drone (Teknologi.id, 2019).
MYO dilengkapi dengan beberapa sensor yang dapat mengenali gerakan tangan dan gerakan lengan. Hal ini ditandai dengan menggunakan proses yang disebut electromyography (EMG), mengindentifikasi isyarat dengan menggerakkan otot –otot, 8 sensor EMG bertanggung jawab untuk mengenali dan melakukan setiap gerakan.
Oleh karena itu, diperlukan untuk setiap pengguna untuk membuat langkah kalibrasi sebelum menggunakan perangkat. Hal ini dilakukan karena setiap pengguna memiliki berbagai jenis kulit, ukuran otot, dll yang akan membantu Myo mengenali setiap gerakan tubuh yang dilakukan.
Gambar 2.1. Penggunaan Myo Gesture Control Armband dan perangkat (https://support.getmyo.com)
Faktor penting lain yang terkait dengan gerakan membaca hanya gambar pendekatan adalah MYO memiliki sensor taktil, yang bertanggung jawab untuk transmisi umpan balik (tiga jenis interval –pendek, menengah dan getaran panjang) kepada pengguna saat ia membuat langkah yang tepat atau ingin mengaktifkan sistem.
Untuk koneksi, MYO sendiri menggunakan teknologi Bluetooth adapter, yang memungkinkan perangkat untuk melakukan tugasnya.
2.2. EMG (Elektromyography)
Elektromiografi (EMG) adalah teknik untuk mengevaluasi dan merekam aktivitas listrik yang dihasilkan oleh otot rangka. EMG dilakukan menggunakan alat yang disebut Electromyograph, untuk menghasilkan rekaman yang disebut Elektromiogram. Sebuah Electromyograph mendeteksi potensial listrik yang dihasilkan oleh sel-sel otot ketika sel-sel ini elektrik atau neurologis diaktifkan. Sinyal dapat dianalisis untuk mendeteksi kelainan medis, tingkat aktivasi, perintah rekrutmen atau untuk menganalisa biomekanik gerakan manusia atau hewan.
Didokumentasikan percobaan pertama tentang EMG dimulai dengan karya-karya Francesco Redi pada tahun 1666. Redi menemukan otot yang sangat khusus dari ikan pari listrik (Electric Eel) yang menghasilkan listrik. Pada 1773, Walsh telah mampu menunjukkan bahwa jaringan otot ikan Eel itu bisa menghasilkan percikan listrik.
Pada tahun 1792, publikasi berjudul De Viribus Electricitatis di Motu Musculari Commentarius muncul, ditulis oleh Luigi Galvani, di mana penulis menunjukkan bahwa listrik bisa memulai kontraksi otot. Enam dekade kemudian, pada tahun 1849,
8
Dubois-Raymond menemukan bahwa hal itu juga memungkinkan untuk merekam aktivitas listrik selama kontraksi otot sukarela. Rekaman sebenarnya pertama kegiatan ini dibuat oleh Marey pada tahun 1890, yang juga memperkenalkan elektromiografi panjang. Pada tahun 1922, Gasser dan Erlanger digunakan osiloskop untuk menampilkan sinyal-sinyal listrik dari otot. Karena sifat stokastik dari sinyal myoelectric, hanya informasi yang kasar dapat diperoleh dari pengamatan tersebut.
Kemampuan mendeteksi sinyal elektromiografi meningkat secara stabil dari tahun 1930 hingga tahun 1950-an, dan peneliti mulai menggunakan elektroda ditingkatkan lebih luas untuk studi otot.
Sinyal EMG digunakan dalam aplikasi klinis dan biomedis. EMG digunakan sebagai alat diagnostik untuk mengidentifikasi penyakit neuromuskuler, menilai nyeri punggung bawah, kinesiologi, dan gangguan kontrol motor. sinyal EMG juga digunakan sebagai sinyal kontrol untuk perangkat palsu seperti buatan tangan, lengan, dan tungkai bawah.
Jumlah MU dalam sebuah otot berbeda –beda berkisar dari 100 sampai 1000 buah. Selain itu, gaya yang dihasilkan oleh setiap MU juga bervariasi dan berbeda satu sama yang lain. Bahkan, perbedaannya bisa mencapai 100 kali lipat atau lebih ( Moritani, et al, 2005).
Sumber sinyal EMG adalah potensial aksi dari MU yang dikenal dengan motor unit Action potential (MUAP), yang dibangkitkan selama otot. Jumlah MUAP yang diaktifkan terjadi tidak bersamaan. MUAP inilah yang ditangkap oleh elektrode – elektrode yang diletakkan pada permukaan kulit untuk menangkap sinyal EMG (Criswell, 2010)
Gambar 2.2. Mekanisme pembangkitan gerakan otot (Moritani, et al, 2005).
2.2.1. Karakteristik Sinyal EMG
Sinyal EMG adalah sinyal acak atau stokastik yang amplitudonya berkisar dari 0 sampai 1,5 mV ( rms = root mean square) atau 0 ke 10 mV (puncak ke puncak ) dengan rentang frekuensi antara 0 –500 Hz. Yang perlu diperhatikan dalam sinyal EMG adalah kehadiran noise yang berada pada rentang frekuensi 50 –150 Hz (De Luca, 2002). Noise bisa muncul dari berbagai sumber seperti noise internal dari komponen listrik, pergerakan artifak, ketidakstabilan sinyal, dan noise lingkungan sekitar.
2.3. Artificial Neural Network
Artificial Neural Network atau Jaringan Saraf Tiruan (JST) adalah salah satu cabang dari Artificial Intelligence. JST merupakan suatu sistem pemprosesan informasi yang memiliki karakteristik-karakteristik menyerupai jaringan saraf biologi (Fauset, 1994).
Hal yang sama diutarakan oleh Simon Haykin, yang menyatakan bahwa JST adalah sebuah mesin yang dirancang untuk memodelkan cara otak manusia mengerjakan fungsi atau tugas-tugas tertentu. Mesin ini memiliki kemampuan menyimpan pengetahuan berdasarkan pengalaman dan menjadikan simpanan pengetahuan yang
10
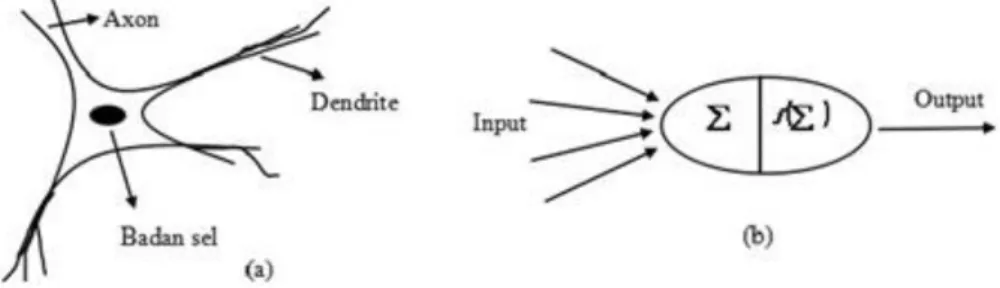
dimiliki menjadi bermanfaat (Haykin, 2008).Ide dasar Neural Network dimulai dari otak manusia yang disusun atas miliaran neuron dimana masing-masing neuron akan terhubung pada puluhan ribu neuron lain. Otak memuat sekitar 1011 neuron. Neuron ini berfungsi memproses setiap informasi yang masuk. Satu neuron memiliki 1 akson, dan minimal 1 dendrit. Setiap sel syaraf terhubung dengan syaraf lain, jumlahnya mencapai sekitar 104 sinapsis. Masing-masing sel itu saling berinteraksi satu sama lain yang menghasilkan kemampuan tertentu pada kerja otak manusia. Suatu neuron tersusun atas 3 komponen utama yaitu:
1. Dendrites, merupakan saluran sinyal input yang kekuatan koneksinya kepada inti sel dipengaruhi oleh sebuah bobot (Weight).
2. Badan Sel (Cell Body), adalah tempat proses komputasi sinyal input berbobot untuk menghasilkan sinyal outputyang akan dikirimkan kepada neuron.
3. Axon, adalah bagian yang mengirimkan sinyal output kepada neuron lain yang terhubung pada neuron.
Dimana dendritesmemiliki peran sebagaiinputyang merupakan berbagai informasi yang diperlukan oleh ANN dalam menyelesaikan masalah yang diberikan. Sedangkan badan sel adalah tempatterjadinyaproses komputasi penjumlahandan fungsi aktivasi yang diberikan kepada hasil perhitungan penjumlahan. Selanjutnya hasil dari perhitungan yang dilakukan pada badan sel akan dikeluarkan pada output yang merupakan representasi dari axon. ANN memiliki beberapa elemen dasar yang berguna untuk melakukan proses komputasi dalam menyelesaikan berbagai masalah yang diberikan. Elemen-elemen dasar tersebut antara lain layer input, layer output, bobot (weights),fungsi aktivasi dan fungsi pembelajaran. Dapat dilihat pada Gambar 2.3.
Gambar 2.3 Neuron Secara Biologi(a) dan Representasinya dalam ANN (b) (Wulandari& Lili, 2017)
menjumlahkannya (weighted sum) dan menambahkan bias. Hasil dari operasi ini akan dijadikan parameter dari activation function yang akan dijadikan output dari neuron tersebut.
2.4. Klasifikasi
Klasifikasi menurut Towa P. Hmakotrda dan J.N.B. Tairas (1995) adalah Mengatakan bahwa klasifikasi adalah pengelompokan yang sistematis dari pada sejumlah obyek, gagasan, buku atau benda-benda lain ke dalam kelas atau golongan tertentu berdasarkan ciri-ciri yang sama.
Menurut Suwarno (2007) klasifikasi terbagi dalam dua jenis, yaitu :
1. Klasifikasi artifisial (artificial classification), yaitu klasifikasi bahan pustaka berdasarkan sifat-sifat yang secara kebetulan ada pada bahan pustaka tersebut.
Misalkan berdasarkan warna buku atau tinggi buku.
2. Klasifikasi fundamental (fundamental classification), yaitu klasifikasi bahan pustaka berdasarkan isi atau subjek buku, yaitu yang tetap pada bahan pustaka meskipun kulitnya berganti-ganti atau formatnya diubah. Klasifikasi fundamental ini yang sering digunakan perpusatakaan saat ini.
2.5. Backpropagation
Backpropagation atau propagasi balik adalah salah satu algoritma yang digunakan dalam pelatihan multilayer perceptron. Susunan langkah algoritma pelatihan untuk jaringan dengan satu lapisan tersembunyi (Desiani & Arhami, 2006):
Langkah 0 : Inisisasi bobot (tetapkan dalam nilai acak yang kecil).
Langkah 1 : Selama kondisi berhenti tidak terpenuhi, lakukan langkah 2-8.
Tahap efek forward (propagasi maju)
Langkah 3 : Setiap neuron pada lapisan input (Xi, i=1, 2, ..., n) menerima sinyal dan meneruskannya ke lapisan tersembunyi.
Langkah 4 : Jumlahkan bobot pada lapisan tersembunyi (zj, (j =1, 2, ..., p), dengan Persamaan 2.1. Nilai output Zj diperoleh dengan menggunakan fungsi aktivasi
12
sigmoid.
𝑧_𝑛𝑒𝑡𝑗 = 𝑣𝑗0+ ∑𝑖=1𝑛 𝑥𝑖𝑣𝑗𝑖
𝑧𝑗 = 𝑓(𝑧𝑛𝑒𝑡𝑗 1
1 + 𝑒−𝑧_𝑛𝑒𝑡𝑗)
Langkah 5 : Untuk setiap neuron pada lapisan output, 𝑦𝑘,(𝑘 = 1, 2, … , 𝑚)dengan menggunakan Persamaan 2.3. Nilai output 𝑦𝑘diperoleh dengan menggunakan fungsi aktivasi sigmoid.
𝑦𝑛𝑒𝑡𝑘 = 𝑤𝑘0+ ∑𝑗=1𝑝 𝑧𝑗𝑤𝑘𝑗 𝑦𝑘 = 𝑓(𝑦𝑛𝑒𝑡𝑘) 1
1 + 𝑒−𝑦_𝑛𝑒𝑡𝑘 Tahap Backward (propagasi mundur)
Langkah 6 : Hitung faktor di unit keluaran 𝑦𝑘, (𝑘 = 1,2, 𝑚 dengan menggunakan Persamaan 2.4.
𝛿𝑘 = (𝑡𝑘− 𝑦𝑘)𝑓′(𝑦𝑛𝑒𝑡𝑘) = (𝑡𝑘− 𝑦𝑘)𝑦𝑘(1 − 𝑦𝑘)
𝛿𝑘 Merupakan unit kesalahan yang digunakan untuk mengubah bobot layer pada langkah selanjutnya (Langkah 7). Kemudian hitung perubahan bobot (digunakan nanti untuk mengubah nilai 𝑤𝑗𝑘 (yang baru) dengan learning rate (α) menggunakan Persamaan 2.5.
∆𝑤𝑗𝑘= 𝛼𝛿𝑘𝑧𝑗
Langkah 7 : Hitung penjumlahan 𝑠𝑛𝑒𝑡pada hidden layer 𝑧𝑗, (j=1, 2, ..., p) dengan menggunakan persamaan 2.6. hitung faktor 𝛿 pada unit tersembunyi menggunakan Persamaan 2.7. Kemudian hitung suku perubahan bobot 𝑣𝑖𝑗 (yang digunakan untuk memperoleh nilai bobot 𝑣𝑖𝑗 yang baru) dengan menggunakan persamaan 2.8.
𝛿_𝑛𝑒𝑡𝑗 = ∑𝑘=1𝑚 𝛿𝑘𝑤𝑗𝑘
𝛿𝑗 = 𝛿 _𝑛𝑒𝑡𝑗𝑓′(𝑧𝑛𝑒𝑡𝑗) = 𝛿_𝑛𝑒𝑡𝑗𝑧𝑗(1 − 𝑧𝑗)
𝛿
(2.2)
(2.2) (2.3)
(2.4)
(2.5)
(2.6) (2.7) (2.8)
Langkah 8 : Untuk setiap neuron pada lapisan output 𝑦𝑘,(k=1, 2, ..., m), ganti bobot dan biasnya.
𝑤𝑗𝑘(𝑏𝑎𝑟𝑢) = 𝑤𝑗𝑘(𝑙𝑎𝑚𝑎)+ ∆𝑤𝑗𝑘
Setiap neuron pada lapisan tersembunyi 𝑧𝑗,(j=1, 2, ..., p, ganti nilai bobot dan biasnya.
𝑣𝑖𝑗(𝑏𝑎𝑟𝑢) = 𝑣𝑖𝑗(𝑙𝑎𝑚𝑎)+ ∆𝑣𝑖𝑗
Setelah pelatihan jaringan selesai dilakukan, maka pengenalan pola dapat dilakukan.
Pada pelatihan Backpropagation, nilai output jaringan hanya diperoleh pada fase feed Forward. Adapun keterangan dari persamaan-persamaan diatas adalah:
X = Masukkan (input).
vij = Bobot pada lapisan tersembunyi.
Wij = Bobot pada lapisan keluaran.
Voj = Bias pada lapisan tersembunyi
Woj = Bias pada lapisan tersembunyi dan lapisan keluaran.
J =1,2,3, ....,n.
N = Jumlah unit pengolah pada lapisan tersembunyi.
K = Jumlah unit pengolah pada lapisan keluaran.
Y = Keluaran hasil.
2.6. Machine Learning
Machine Learning (ML) atau pembelajaran mesin merupakan pendekatan dalam AI yang banyak digunakan untuk menggantikan atau menirukan perilaku manusia untuk menye-lesaikan masalah atau melakukan otomatisasi. Sesuai namanya, ML mencoba menirukan bagaimana proses manusia atau makhluk cerdas belajar dan mengeneralisasi. Setidaknya ada dua aplikasi utama dalam ML yaitu, klasifikasi dan prediksi . Ciri khas dari ML adalah adanya proses pelatihan, pembelajaran, atau training. Oleh karena itu, ML membutuhkan data untuk dipelajari yang disebut (2.9)
(2.10)
14
sebagai data training. Klasifikasi adalah metode dalam ML yang digunakan oleh mesin untuk memilah atau mengklasifikasikan obyek berdasarkan ciri tertentu sebagaimana manusia mencoba membedakan benda satu dengan yang lain. Sedangkan prediksi atau regresi digunakan oleh mesin untuk menerka keluaran dari suatudata masukan berdasarkan data yang sudah dipelajari dalam training. Metode ML yang paling populer yaitu Sistem Pengambil Keputusan, Support Vector Machine (SVM) dan Neural Network (Abu, 2017).
2.7. Motorik
Perkembangan motoric diartikan sebagai perkembangan dari unsur kematangan pengendalian gerak tubuh dan otak sebagai pusat gerak (Hurlock, 1978: 159). Gerak ini secara jelas dibedakan menjadi gerak kasar dan halus.
2.7.1. Pembagian Keterampilan Motorik
Berdasarkan kecermatan dalam melakukan Gerakan keterampilan dibagi menjadi dua yaitu keterampilan motorik kasar (gross motor skill) dan keterampilan motorik halus (fine motor skill) (Magill, (1989:11).
a. Keterampilan Motorik Kasar (gross motor skill)
Keterampilan motoric kasar (gross motor skill) merupakan keterampilan gerak yang menggunakan otot-otot besar, tujuan kecermatan Gerakan bukan merupakan suatu hal yang penting akan tetapi koordinasi yang halus dalam Gerakan adalah hal yang paling penting, Motorik kasar meliputi melompat, melempar, berjalan, dan meloncat.
b. Keterampilan motoric halus (fine motor skill)
merupakan keterampilan motorichalus yang merupakan keterampilan yang memerlukan control dari otot kecil dari tubuh untuk mencapai tujuan dari keterampilan. Secara umum keterampilan mototrik halus meliputi koordinasi mata dan tangan keterampilan ini membutuhkan kecermatan yang tinggi. Contoh motoric halus yaitu : melukis, menjahit, dan mengancingkan baju.
2.7.2. Motorik Halus
Gerakan motorik halus menpunyai peranan yang sangat penting, motoric halus adalah Gerakan yang hanya melibatkan bagian-bagian tubuh tertentu yang dilakukan oleh
membutuhkan tenaga kana tetapi membutuhkan koordinasi yang cermat serta teliti.
(Depdiknas, 2007:1)
Menurut Dini P dan Daeng Sari (1997:72) motoric halus aktivitas mototrik yang melibatkan aktivitas otot-otot kecil atau halus Gerakan ini menuntut koordinasi mata dan tangan serta pengendalian gerak yang baik yang memungkinkan dia melakukan ketepatan dan kecermatan dalam gerak.
Menurut M Saputra dan Rudyanto (2005:118) menjelaskan bahwa motoric halus adalah kemampuan anak dalam beraktivitas dengan menggunakan otot-otot halus dengan contoh seperti menulis, meremas, menggenggam, menggambar, menyusun balok dan memasukkan kelereng. Sedangkan menurut Kartini Kartono (1995: 83) motoric halus addalah ketangkasan, keterampilan, jari tangan dan pergelangan tangan serta penugasan terhadap otot urat pada wajah.
2.7.3. Faktor Yang Mempengaruhi Motorik Halus
Factor-faktor yang mempengaruhi perkembangan motoric anak sebagai berikut:
(Kartono, 1995)
a. Faktor hereditas (warisan sejak lahir atau bawaan)
b. Faktor lingkungan yang menguntungkan atau merugikan kematangan fungsi- fungsi organis dan psikis.
c. Aktivitas anak sebagai subyek bebas yang berkemauan, kemampuan, punya emosi serta mempunyai usaha.
Faktor-faktor yang memperlambat atau mempercepat perkembangan sistem mototrik halus antara lain (Rumini, et al (2004:24-26) :
a. Faktor Genetik
Individu mempunyai beberapa faktor keterunan yang dapat menunjang perkembangan motoric missal otot kuat, syaraf baik, dan kecerdasan yang menyebabkan perkembangan motorik individu tersebut menjadi baik dan cepat.
b. Faktor Kesehatan Pada Priode Prenatal
16
Janin yang dala kandungan dalam keadaan sehat, tidak keracunan, tidak kekurangan gizi, tidak kekurangan vitamin dapat membantu memperlancar perkembangan motorik anak.
c. Faktor Kesulitan dalam Melahirkan
Faktor kesulitan dalam melahirkan seperti dalam melahirkan menggunakan bantuan alat vacuum, tang, sehingga bayi mengalami kerusakan otak dan akan memperlambat perkembangan motoric bayi.
d. Kesehatan dan Gizi
Kesehatan dan gizi yang baik pada awal kehidupan pasca melahirkan akan mempercepat perkembangan motoric bayi.
e. Rangsangan
Adanya rangsangan, bimbingan dan kesempatan anak untuk menggerakkan semua bagian tubuh akan mempercepat perkembagan motorik bayi.
f. Perlindungan
Perlindungan yang berlebihan sehingga anak tidak ada waktu untuk bergerak sontohnya anak hanya digendong terus, dan aktivitas berjalan lainnya.
g. Prematur
Kelahiran sebelum masanya atau bulan kelahirannya yang biasanya disebut premature juga akan memperlambat perkembangan motoric anak.
h. Kelainan
Individu yang mengalami kelainan baik fisik maupun psikis, social, dan mental juga dapat mempengaruhi keterlambatan dalam perkembagnan motoric halus.
2.8. Feature Extraction
Pada proses Feature Extraction dari pengenalan waktu dan pengenalan frekuensi menjadi hal penting dalam klasifikasi pola sinyal myoelectric atau EMG (Boyali et al, 2016). Metode yang efektif untuk ekstraksi fitur sinyal EMG adalah Wavelet Transform (WT) (Rubani et al, 2013). Pada proses ekstraksi fitur, Sinyal EMG
(2.11)
(2.12)
(2.13)
(2.14)
(2.15)
(2.16) sebagai fitur yang mempunyai dimensi tinggi, sehingga mengakibatkan permasalahan pada klasifikasi. Oleh karena itu, fitur vektor tersebut perlu direduksi pada dimensi yang lebih rendah. Metode untuk mereduksi fitur dari fitur berdimensi tinggi ke dimensi rendah menggunakan metode reduksi fitur PCA (Rubana, 2013).
Dalam penelitian ini, menggunakan empat buah fitur (Abdulhamit, 2012) yaitu:
1. Mean absolute value (MAV), merupakan rata-rata absolut dari amplitudo sinyal EMG pada sebuah segmen, secara matematis ditunjukkan pada Persamaan 2.11
𝑀𝐴𝑉 = 1
𝑁∑ | ×𝑛
𝑁 𝑛=1
|
2. Jumlah Peak, merupakan jumlah data yang menjadi puncak dari suatu segmen pada deretan titik data. Untuk menghitung banyaknya Peak digunakan Persamaan 2.12.
𝜌 = ∑
𝑡+𝑇 𝑡
[𝑓(𝑥𝑡)]
Dimana
𝑓(𝑥𝑡) = {1, (𝑥(𝑡−1) < 𝑥𝑡) 𝑑𝑎𝑛 (𝑥(𝑡−1) < 𝑥𝑡) 0, 𝑙𝑎𝑖𝑛𝑛𝑦𝑎
3. Willison amplitude (WAMP), merupakan jumlah hitungan untuk setiap perubahan amplitudo sinyal EMG yang melebihi ambang batas yang telah ditentukan yakni sebesar 5 mV sebagaimana ditunjukkan pada Persamaan 3.4.
𝑊𝐴𝑀𝑃 = ∑
𝑡+𝑇 𝑡
𝑓 |𝑥(𝑡+1) − 𝑥 𝑡| Dimana
𝑓(𝑥𝑡) = 𝑓(𝑥) = {1, (𝑥) > 𝑡𝑟𝑒𝑠ℎ𝑜𝑙𝑑 0, 𝑙𝑎𝑖𝑛𝑛𝑦𝑎
4. Root mean Square (RMS), merupakan perhitungan fitur untuk menentukan rasio antara tingkat tegangan langsung dan alternatifnya yang dihitung dengan
menggunakan Persamaan 3.6
𝑅𝑀𝑆 = √1
𝑁∑ 𝑥 𝑘
𝑁 𝑘=1
2
18
2.9. Penelitian Terdahulu
Beberapa penelitian terdahulu yang pernah dilakukan yang berkaitan dengan klasifikasi gerakan tangan menggunakan Myo Gesture Control Armand dan metode Artificial Neural Network seperti penelitian yang dilakukan oleh Legowo, et al (2017) yang berjudul Klasifikasi Gerakan Tangan SIBI (Sistem Isyarat Bahasa Indonesia) menggunakan Leap Motion dengan metode Klasifikasi Naive Bayes. Peneliti membuat penelitian tersebut untuk dapat mengenali gerakan bahasa isyarat dan dapat digunakan sebagai metode pelatihan bagi masyarakat awam sehingga dapat mengatasi keterbatasan dalam berkomunikasi antara penyandang tuna wicara dengan orang normal yang ingin mempelajari bahasa isyarat. Dalam penelitian ini alat yang digunakan yaitu Leap Motion dan gerakan yang dapat dikenali hanya 10 gerakan bahasa isyarat yang terdiri dari lima gerakan statis dan pengembangan dinamisnya.
Setelah dilakukan pengujian terhadap dua macam subjek, yang pertama adalah dengan subjek yang terdapat pada data training dihasilkan nilai akurasi rata-rata sebesar 80.5%, sedangkan pengujian terhadap subjek yang tidak terdapat dalam data training mengalami penurunan nilai akurasi yakni hanya mencapai nilai rata-rata 70.7%.
Penelitian selanjutnya yang dilakukan oleh Goenfi (2017) yang berjudul Pengenalan Gerakan Tangan Manusia Menggunakan Deep Neural Network. Penelitian tersebut membahas tentang pengenalan gerakan tangan manusia pada interaksi komputer-manusia dengan posisi tangan tanpa memegang benda apapun. Dalam penelitian tersebut, peneliti membuat enam jenis gerakan yang berfungsi untuk menjalankan beberapa aplikasi yaitu file explorer untuk memilih file, Windows Media Player untuk file musik, VLC media player untuk file video, Microsoft Power Point untuk file presentasi dan Acrobat Reader DC untuk file PDF.
Penelitian selanjutnya yang dilakukan oleh Sathiyanarayanan, et al (2016) yang berjudul Myo Armband for Physiotherapy Healthcare : A case Study Using Gesture Recognition Application. Penelitian tersebut membahas tentang memanfaatkan pengembangan di bidang kedokteran dan perawatan kesehatan untuk meningkatkan sistem perawatan kesehatan masyarakat. Gerakan manusia akan memungkinkan untuk mengumpulkan besar jumlah data dan serangkaian jalur EMG yang dapat dianalisis
ketidakpuasan dalam menjalani terapi. Peneliti memanfaatkan Myo Armband sebagai fisioterapi oleh para dokter dan pasien. Dalam penelitian ini, peneliti memperhatikan aspek kemudahan belajar, kenyamanan dan stress dalam pemakaian Myo Armband.
Dan dalam penelitian tersebut, menghasilkan kuesioner yang disebar yaitu ketika melakukan terapi, pasien merasa senang dan ada kemajuan dalam melakukan terapi, mudah digunakan tetapi cukup rumit dalam penggunaan yang singkat.
Selanjutnya penelitian yang membahas tentang Klasifikasi hand gesture dengan Myo Armband adalah dari Boyali, et al (2015) yang berjudul Hand Posture and Gesture Recognition using MYO Armband and Spectral Collaborative Representation based Classification. Dalam penelitian ini, peneliti melakukan klasifikasi Gerakan tangan menggunakan metode CRC (Collaborative Representation Based Classification). CRC sendiri adalah metode klasifikasi yang berdasarkan representasi dari pola yang diamati y sebagai linier dengan kombinasi pola yang ditumpuk dalam kamus pelatihan A. dalam penelitian ini klasifikasi yang dihasilkan menjadi 6 gerakan yaitu Fist, Hand Relax, Fingers Spread, Wave in, Wave Out, Double Tap. Dalam penelitian ini juga dijelaskan akurasi yang dihasilkan jika melakukan Gerakan terus menerus sangat tinggi dan kompeten dalam literatur terkait di mana pemrosesan sinyal dan metode pengelolahan pad saat bekerja pada data mentah sangat baik. Peneliti juga menyarankan untuk menggunakan metode lain yang lebih mudah dalam pengenalan sinyal EMG.
Penelitian yang berkaitan tentang klasifikasi gerakan tangan menggunakan Myo Gesture Control Armband dari penelitian Cognolato, et al (2018) dengan judul Hand Gesture Classification in Transradial Amputees Using The Myo Armband Classifier.
Dalam penelitian ini, peneliti melakukan klasifikasi gerakan tangan dengan menggunakan Myo Armband untuk melakukan amputasi transradial, dalam penelitian ini ada lima gerakan isyarat yang diklasifikasi. Dalam pengujian yang dilakukan dengan setiap gerakan diulang tiga kali dengan lengan dalam tiga posisi berbeda, akurasi klasifikasi keseluruhan untuk empat gerakan tangan berdasarkan data elektromiografi berkisar antara 50% dan 97%. Dalam percobaan tersebut, hasil tersebut menunjukkan bahwa Myo built-in clasifier menunjukkan kinerja yang baik
20
ketika diuji pada tangan yang diamputasi dengan sistem kontrol myoelectric berbiaya rendah.
Tabel 2.1. Penelitian Terdahulu.
No Peneliti Judul Tahun Keterangan
1. Legowo, et al Klasifikasi Gerakan Tangan SIBI (Sistem Isyarat Bahasa Indonesia) Menggunakan Leap Motion dengan Metode Klasifikasi Naive Bayes
2017 Klasifikasi gerakan tangan yang terdiri dari 19 gerakan bahasa isyarat.
Dalam pengujian didapat akurasi sebesar 80,5% dan dalam pengujian terhadap subjek yang tidak terdapat dalam data training mengalami
penurunan nilai akurasi yakni hanya mencapai nilai rata- rata 70.7%.
2. Eka Pratiwi Goenfi
Pengenalan Gerakan Tangan Manusia Menggunakan Deep Neural Network
2017 Peneliti melakukan pengenalan gerakan tangan manusia menggunakan
metode Deep Neural Network. Adapun hasil akurasi yang didapatkan dalam percobaan
menggunakan hidden layer sebanyak dua dan
neuron masing- masing sebanyak 300 dan 50, mendapatkan
persentase akurasi sebesar 77,02%.
3. Sathiyanarayanan, et al
Myo Armband for
Physiotherapy Healthcare : A case Study Using Gesture Recognition Application
2016 Dalam penelitian tersebut, peneliti melakukan
diagnostik dengan mengumpulkan data yang didapat dari Myo Armband.
Peneliti hanya menggunakan
algoritma yang terdapat di dalam
Myo Armband
untuk mengenali setiap gerakan yang dilakukan
4. Boyali, et al Hand Posture and Gesture Recognition using MYO Armband and Spectral Collaborative
Representation based Classification
2015 Peneliti menerapkan Myo Armband dan metode Spectral Collaborative
Representation based Classification untuk pengenalan 6 gerakan. Dalam penerapan metode Spectral
Collaborative
22
No Peneliti Judul Tahun Keterangan
Representation based Classification, hasil pengujian di dapatkan tingkat akurasi lebih dari 97%. Pengujian tersebut
menggunakan data mentah
5. Cognolato, et al Hand Gesture Classification in Transradial Amputees Using The Myo Armband Classifier
2018 Dalam penelitian ini, peneliti tidak menggunakan pelatihan dengan dataset sebelumnya.
Akurasi klasifikasi yang dihasilkan dalam pengujian dengan melakukan empat gerakan tangan berdasarkan data elektromiografi bekisar antara 50%
dan 97%. Dalam pengamatan
dilakukan juga antara panjang sisi tungkai dan akurasi klasifikasi yang diamati.
ANALISIS DAN PERANCANGAN
3.1 Data
Pada tahapan ini dilakukan pengambilan data yang terkait dengan tugas akhir. Data yang dibutuhkan oleh penulis dalam pengerjaan tugas akhir ini adalah data EMG (Elektromyograph) yang dihasilkan dari Myo Gesture Control Armband. Data tersebut berisi gerakan tangan yang sebelumnya diambil menggunakan aplikasi perekam data Myo Gesture Control Armband yang terdiri dari delapan Channel dan disusun menjadi 64 Channel setiap baris, data ini memiliki format CSV (Comma Separated Value).
Data tersebut memiliki beberapa field, yaitu value dan gesture, seperti yang ditunjukkan oleh Gambar 3.1.
Gambar 3.1. Data Hand Gesture dengan format CSV (Comma Separated Value)
22
3.2 Analisis Sistem
Bagian ini membahas tahap - tahap yang dilakukan dalam pembangunan sistem.
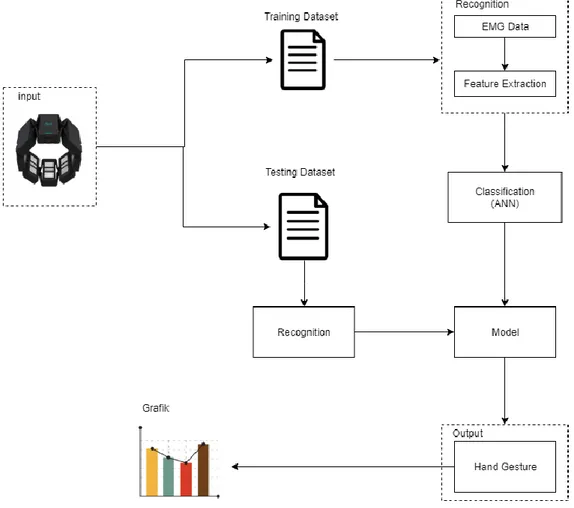
Adapun proses yang dapat dilakukan adalah sebagai berikut: Dataset yang telah dikumpulkan menjadi dua bagian yaitu data pelatihan (training data) dan data pengujian (testing data); kemudian data tersebut masuk ketahap recognition yang terdiri dari EMG Data dan Feature Ectraction. EMG bertujuan untuk mengkoneksikan antara perangkat dan computer sedangkan Feature Extraction. EMG menjadi fitur vector; selanjutnya proses klasifikasi menggunakan algoritma Artificial Neural Network (ANN); hasil klasifikasi disimpan dalam bentuk hand gesture, kemudian divisualisasikan kedalam bentuk grafik. Arsitektur umum yang menggambarkan rangkaian proses klasifikasi ditunjukkan pada Gambar. 3.2.
Gambar 3.2. Arsitektur Umum
Penjelasan tahapan – tahapan Gambar 3.2.
3.2.1. Input
Pada tahap awal yaitu pengumpulan dataset yang merupakan kumpulan EMG Data dari beberapa genggaman yang dilakukan menggunakan MYO Gesture Control Armband. Dalam pengumpulan dataset tersebut didapat delapan EMG data dari setiap Gerakan yang dilakukan, pada saat pengumpulan dataset terdapat juga sensor IMU yang terdiri dari accelerometer, gyroscope, dan magnetometer yang dapat mendeteksi pergerakan sensor dalam sumbu X, Y, dan Z. Frekuensi maksimum yang bisa dihasilkan oleh perangkat ini adalah 200Hz. (Kurniawan et al, 2018).
3.2.2. Recognition
Pada proses recognition ini sendiri terdapat beberapa proses, yang di antaranya yaitu EMG Data, dan Feature Extraction.
a. EMG Data
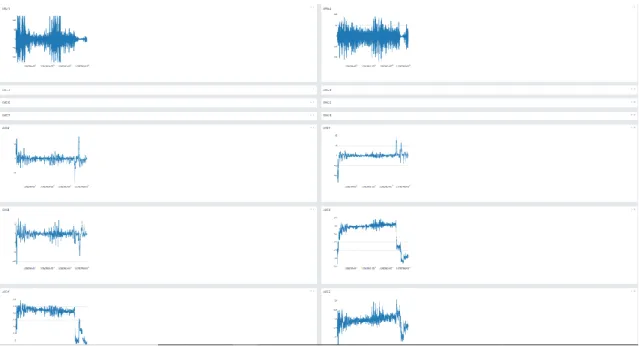
MYO Gesture Control Armband terdiri dari delapan bagian sensor EMG yang terletak di sekitar lengan pengguna. Frame rate dari data EMG adalah 200 Hz. Hasil klasifikasi yang telah ditetapkan oleh MYO Gesture Control Armband sendiri adalah menggenggam, menekan atau merenggangkan jari, dan melambaikan jari ke kiri dan ke kanan (Wardhany et al, 2014). Pada saat penelitian, Myo Gesture Control Armband digunakan di lengan sebelah kanan dan menggunakan library dari Myo Armband untuk mengkoneksikan antara perangkat dan komputer. Dalam proses ini EMG data dan fitur lain yang dimiliki oleh Myo Gesture Control Armband seperti Gyroscope, Accelerometer, dan magnetometer dibersihkan menghasilkan EMG data saja yang tersisa, seperti yang ditunjukkan pada Gambar 3.3 dan Gambar 3.4.
26
Gambar 3.3. Contoh EMG Data sebelum di cleaning.
Sebelum digunakan dataset memiliki beberapa data yang tidak dibutuhkan seperti Emg Data, Gyroscope, Orientation, dan Accelerometer. Seperti yang ditunjukkan pada Gambar 3.3.
Gambar 3.4. Contoh EMG Data sesudah di cleaning.
Seperti yang ditunjukkan pada Gambar 3.4. data sudah di cleaning dengan menyisahkan EMG data saja, adapun cara yang dilakukan untuk menghilangkan data yang tidak dibutuhkan adalah dengan mematikan fungsi-fungsi seperti Gyroscope,
dari Myo Gesture Control Armband.
b. Feature Extraction
Pada tahap ini EMG dikenai proses cleaning dengan menggunakan fungsi MAV untuk mendapatkan rata-rata absolut dari amplitudo sinyal EMG pada setiap segmen. Pada penelitian ini penulis menerapkan 2 jenis feature extraction, yaitu: MAV dan RMS.
Kedua jenis feature extraction tersebut diterapkan menggunakan persamaan 2.2 dan 2.7. Proses feature extraction ini dapat dituangkan dalam bentuk pseudocode seperti yang disajakin pada Gambar 3.5.
Gambar 3.5. Pseudocode untuk proses cleaning pada EMG Data.
3.2.3. Clasification
Pada tahap ini akan dilakukan klasifikasi pada gesture tangan yang digunakan untuk mengenali pola EMG Data adalah Artificial Neural Network karena metode ini secara tepat dapat mengenali sinyal myoelectric Rubana et al, 2013). Untuk mengukur kinerja dari klasifikasi, semua data EMG dibagi menjadi dua bagian, yaitu data Training dan data Test (Peter, 2014). Data Training digunakan untuk membangun model klasifikasi, sedangkan data Test digunakan untuk memverifikasi (Abdulhamit, 2012). pada proses kalsifikasi menggunakan prinsip machine learning, yang nantinya akan menghasilkan model yang sudah dilatih dengan mempelajari sejumlah data latihan (data training). Model tersebut digunakan untuk memproses data uji (data test). Tujuannya untuk membangun model prediktif yang dapat mengklasifikasikan data secara otomatis agar dapat diketahui kelas dari data secara efektif dan efisien.
Procedure Feature Extraction
var EMG <- Variabel dari data yang didapat dari MYO Armband
var grafik1, grafik2 <- Variabel menampung output grafik1 = hitung fungsi MAV pada EMG
grafik2 = hitung fungsi RMS pada EMG tulis output pada file CSV
tampilkan grafik1, grafik2 end;
28
Pengklasifikasian yang dilakukan nantinya akan menggolongkan beberapa Gerakan tangan yang sebelumnya pada dataset sudah dimasukkan beberapa jenis Gerakan.
Hasil klasifikasi nantinya terdiri dari OK, Fist, Like, Rock, Spock. Adapun langkah- langkah pelatihan jaringan backpropagation menggunakan 2 neuron input, 3 neuron hidden dan 1 neuron output akan diuraikan sebagi berikut.
1. Data dengan input X1 (Value EMG data), X2 (label dari setiap EMG Data) dan Target, sebelumnya data telah masuk ke dalam feature extraction, dimana data di proses untuk menjadikan data tersebut ke dimensi yang lebih rendah.
Adapun perhitungan tersebut dapat dilihat pada Tabel 3.1.
Tabel 3.1. Input dan Target.
Data X1 X2 t(target)
Abilify Discmelt 0,44 0,4 1
2. Inisiasi bobot awal dengan nilai antar 0 sampai 1
a. Inisiasi bobot koneksi antara lapisan input (Vi) dan lapisan tersembunyi (Zi) seperti yang terlihat pada Tabel 3.2.
Tabel 3.2. Bobot Awal Vwi (nilai bobot dari input layer menuju hidden layer)
V1,0(bias) V1,1 V1,2
0,172 0,767 0,332
V2,0(bias) V2,1 V2,2
0,128 0,143 0,261
V3,0(bias) V3,1 V3,2
0,453 0,508 0,132
b. Inisiasi bobot koneksi antara setiap neuron hidden layer (Wi) dan output layer (Y). Seperti yang terlihat pada Tabel 3.3.
Tabel 3.3. Bobot awal Wjk (nilai bobot dari hidden layer menuju output layer)
W1,0 W1,1 W1,2 W1,3
0,457 0,855 0,165 0,311
c. Menentukan nilai parameter learning rate dan maksimum epoch.
• Learning rate (α): 0,1
d. Dilakukan iterasi selama epoch < maksimal epoch e. Lakukan langkah fase forward
• Hitung nilai Z_netj pada lapisan tersembunyi dengan menggunakan Persamaan 2.1
Znet1 = X0 * V1,0 + X1 * V1,1 + X2 * V1,2
= 1 * 0,172 + 0,44 * 0,767 + 0,4 * 0,332
= 0,172 + 0,33748 + 0,1328
= 0,64228
Znet2 = X0 * V2,0 +X1 + V2,1 + X2 * V2,2
= 1 * 0,128 + 0,44 * 0,143, + 0,4 * 0,261
= 0,128 + 0,06292 + 0,332
= 0,64228
Z_net3 = X0 * V3,0 + X1 * V3,1 + X2 * V3,2
= 1* 0,453 + 0,44 * 0,508 + 0,4 * 0,132
= 0,453 + 0,22352 + 0,0528
= 0,72932
• Kemudian hitung nilai keluaran Zj pada node di hidden layer menggunakan fungsi aktivasi, pada contoh ini menggunakan fungsi aktivasi sigmoid, seperti pada Persamaan 2.2.
Z1 = 1
1+𝑒−𝑧_𝑛𝑒𝑡1 = 1
1+𝑒−0,64228 = 1
1+0,526 = 0,655 Z2 = 1
1+𝑒−𝑧_𝑛𝑒𝑡2 = 1
1+𝑒−0,64228 = 1
1+0,526 = 0,655 Z3 = 1
1+𝑒−𝑧_𝑛𝑒𝑡3 = 1
1+𝑒−0,72932 = 1
1+0,482 = 0,675
• Hitung nilai y_netk pada node di output layer dengan menggunakan Persamaan 2.3.
y_net1 = Z0 * W1,0 + Z1 * W1,1 + Z2 * W1,2 + Z3 * W1,3
= 1 * 0,457 + 0,607 * 0,875 + 0,177 * 0,569 + 0,648 * 0,314 = 0,457 + 0,531125 + 0,598588 + 0,203472
= 1,790185
30
• Kemudian hitung nilai keluaran y_netk pada node di output layer menggunakan fungsi aktivasi sigmoid, yang ditunjukkan pada Persamaan 2.4.
y_net1 = 1
1+𝑒−𝑦_𝑛𝑒𝑡1 = 1
1+𝑒−1,790185 = 1
1+0,167 = 0,857 f. Lakukan langkah –langkah pada fase backward.
• Hitung faktor ᵟ di unit keluaran 𝑦𝑘 dengan menggunakan Persamaan 2.5.
ᵟ = (t1 – y1) y1 (1-y1)
= (1-0,78) * 0,78 (1-0,78) = 0,22 * 0,78 * 0,22 = 0,03
• Hitung suku perubahan bobot 𝑊𝑗𝑘 (nilai bobot hidden layer ke output layer) dengan menggunakan Persamaan 2.6.
∆𝑤1,0= 0,1 * 0,03 * 1 = 0,003
∆𝑤1,1= 0,1 * 0,03 * 0,607 = 0,0018
∆𝑤1,2= 0,1 * 0,03 * 0,569 = 0,0017
∆𝑤1,3= 0,1 * 0,03 * 0,648 = 0,0019
• Hitung penjumlahan ᵟnetj pada unit tersembunyi Zj dengan menggunakan Persamaan 2.7.
ᵟnet1 = ᵟ1 * W1,1 = 0,03 * 0,855 = 0,02565 ᵟnet2 = ᵟ1 * W1,2
= 0,03 * 0,165 = 0,00495 ᵟnet3 = ᵟ1 * W1,3 = 0,03 * 0,311 = 0,00933
• Hitung faktor ᵟpada unit tersembunyi dengan menggunakan Persamaan 2.8.
ᵟ1 = ᵟ_𝑛𝑒𝑡1(1-𝑧1)
= 0,02565 ∗ 0,655 (1 − 0,655)
= 0,0058 ᵟ2 = ᵟ_𝑛𝑒𝑡2(1-𝑧2)
= 0,00495 * 0,655 (1- 0,655) = 0,00495 * 0,655 * 0,345 = 0,001119
ᵟ3 = ᵟ_𝑛𝑒𝑡3(1-𝑧3)
= 0,00933 * 0,675 (1 − 0,675) = 0,00933 * 0,675 * 0,325 = 0,00205
• Hitung suku perubahan bobot Vij(nilai bobot input layer ke hidden layer) dengan menggunakan Persamaan 2.9
∆Vi, j = α * ᵟj* Xi
∆V1,0 = 0,1 * 0,006 * 1 = 0,0006
∆V1,1 = 0,1 * 0,006 * 0,1 = 0,000006
∆V1,2 = 0,1 * 0,006 * 0,556 = 0,0003336
∆V2,1= 0,1 * 0,013 * 1= 0,0013
∆V2,2= 0,1 * 0,013 * 0,1= 0,00013
∆V2,3 = 0,1 * 0,013 * 0,556 = 0,0007228
∆V3,1= 0,1 * 0,002 * 1= 0,0002
∆V3,2= 0,1 * 0,002 * 0,1= 0,00002
∆V3,3= 0,1 * 0,002 * 0,556= 0,001112
3.2.4. Output
Pada tahap ini keluaran yang dihasilkan berupa gerakan tangan secara real Time yang akan membaca EMG data dari Myo Gesture Control Armband yang digunakan pada lengan pengguna atau penderita autism. Gerakan yang dikeluarkan adalah OK, Fist, Like, Rock, dan Spock. Adapun selain kelima gerakan tersebut, sistem akan mengeluarkan gerakan relax jika pengguna tidak melakukan gerakan yang sudah ditetapkan.
32
3.2.5. Hasil Evaluasi
Pada tahap ini, gerakan yang sudah diprediksi dan telah dilakukan oleh pengguna maka gerakan tersebut disimpan dalam database untuk selanjutnya ditampilkan yang berupa grafik perkembangan gerakan yang telah dilakukan dalam satu hari, dalam tahap ini pengguna dapat melihat grafik perkembangan per hari dan dapat dilihat sampai satu bulan penuh atau lebih.
3.3. Perancangan Antarmuka Sistem
Perancangan antarmuka sistem merupakan gambaran umum, tentang tampilan yang terdapat pada sistem.
Perancangan antarmuka sistem yang akan dibuat, ditunjukkan pada gambar 3.5.
3.3.1. Perancangan Menu Sistem
Gambar 3.6. Struktur Antarmuka Sistem
Dalam rancangan antarmuka sistem seperti yang ditunjukkan pada Gambar 3.5.
Sistem akan memiliki beberapa menu yang memiliki fungsinya masing-masing.
Ketika sistem dijalankan, maka antarmuka sistem yang pertama kali tampil adalah beranda/halaman utama setelah masuk dalam antarmuka sistem, pengguna dapat melihat beberapa menu-menu yang terdapat pada sistem. Di dalam rancangan antarmuka sistem, pengguna dapat masuk halaman menu seperti aplikasi, tentang, dan
pengguna harus masuk pada menu aplikasi yang di dalamnya terdapat menu Classification Gesture dan Diagram.
a. Rancangan Tampilan Halaman Utama
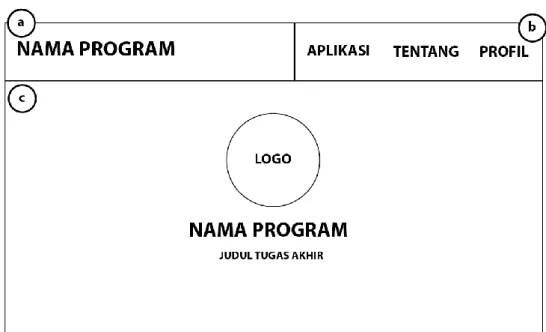
Gambar 3.7. Rancangan Halaman Utama.
Dalam rancangan tampilan halaman utama pada sistem, halaman ini akan menjadi halaman pertama yang akan tampil pada saat sistem pertama kali dijalankan, adapun isi tampilan pada halaman utama ini, sebagai berikut:
a. Menampilkan judul program. Pada posisi ini, sistem akan menampilkan nama dari sistem.
b. Menampilkan menu-menu yang terdapat pada program yang terdiri dari : Aplikasi, Tentang, Profil. Pada posisi ini, menu-menu tersebut ketika diklik akan menuju ke halaman sesuai dengan menu yang dipilih. Pada Button menu tersebut, ketika halaman yang dituju telah terbuka, maka button akan berubah warna pada menu sesuai halaman yang dibuka.
c. Menampilkan logo program dan judul pada tugas akhir. Logo yang di pakai dalam halaman ini, yaitu gambar vector dari alat yang digunakan pada penelitian ini. Pada judul tugas akhir, sistem nantinya akan menampilkan judul dari penelitian ini.
34
b. Rancangan Tampilan Halaman Aplikasi
Gambar 3.8. Rancangan Halaman Aplikasi.
Pada rancangan halaman aplikasi ada berisi fitur yang terdapat sistem. Halaman aplikasi adalah halaman kedua yang akan tampil ketika pengguna melakukan scroll ke bawah atau mengklik button menu yang terdapat pada halaman sebelumnya. Di dalam menu aplikasi nantinya akan berisi fitur-fitur yang terdapat pada penelitian ini, adapun penjelasan dari Gambar 3.7. sebagai berikut :
a. Menampilkan judul program. Pada posisi ini, sistem akan menampilkan nama dari sistem.
b. Menampilkan menu-menu yang terdapat pada program yang terdiri dari : Aplikasi, Tentang, Profil. Pada posisi ini, menu-menu tersebut ketika diklik akan menuju ke halaman sesuai dengan menu yang dipilih. Menampilkan judul menu pada halaman tersebut. Pada Button menu tersebut, ketika halaman yang dituju telah terbuka, maka button akan berubah warna pada menu sesuai halaman yang dibuka.
c. Terdapat judul menu, yang dimana user dapat mengetahui halaman apa yang sedang terbuka.
d. Button untuk masuk ke dalam aplikasi Classification Gesture. Pada halaman ini, pengguna dapat melakukan pengenalan pola gesture secara realtime dan pada sistem akan menampilkan gambar berupa gerakan yang dilakukan oleh pengguna.
melihat aktivitas atau gerakan yang sudah dilakukan setiap harinya dengan tampilan grafik.
c. Rancangan Tampilan Halaman Tentang
Gambar 3.9. Rancangan Halaman Tentang.
Pada rancangan halaman tentang,berisi deskripsi singkat yang berkaitan dengan penelitian yang akan dibuat. Adapun penjelasan dari rancangan yang ditunjukkan pada Gambar 3.8. sebagai berikut:
a. Menampilkan judul program. Pada posisi ini, sistem akan menampilkan nama dari sistem.
b. Menampilkan menu-menu yang terdapat pada program yang terdiri dari : Aplikasi, Tentang, Profil. Pada posisi ini, menu-menu tersebut ketika diklik akan menuju ke halaman sesuai dengan menu yang dipilih. Menampilkan judul menu pada halaman tersebut. Pada Button menu tersebut, ketika halaman yang dituju telah terbuka, maka button akan berubah warna pada menu sesuai halaman yang dibuka.
c. Terdapat judul menu, yang dimana user dapat mengetahui halaman apa yang sedang terbuka.
36
d. Terdapat deskripsi singkat yang akan berisi penjelasan dari sistem yang akan dibuat.
Gambar 3.10. Rancangan Halaman Profil
Pada rancangan halaman profil, terdapat beberapa isi yang berkaitan profil dari peneliti. Adapun penjelasan rancangan yang ditunjukkan pada Gambar 3.9. sebagai berikut:
a. Menampilkan judul program. Pada posisi ini, sistem akan menampilkan nama dari sistem.
b. Menampilkan menu-menu yang terdapat pada program yang terdiri dari : Aplikasi, Tentang, Profil. Pada posisi ini, menu-menu tersebut ketika diklik akan menuju ke halaman sesuai dengan menu yang dipilih. Menampilkan judul menu pada halaman tersebut. Pada Button menu tersebut, ketika halaman yang dituju telah terbuka, maka button akan berubah warna pada menu sesuai halaman yang dibuka.
c. Terdapat judul menu, yang dimana user dapat mengetahui halaman apa yang sedang terbuka.
d. Menampilkan Logo Universitas dan memuat profil penulis seperti nama, mim, prodi, dan fakultas.
e. Menampilkan footer sistem. Dalam footer berisi copyright dan tahun pembuatan sistem.
IMPLEMENTASI DAN PENGUJIAN SISTEM
4.1 Kebutuhan Sistem
Dalam perancangan sistem Klasifikasi Gerakan Tangan untuk Autism menggunakan Myo Gesture Control Armband dan Metode Artificial Neural Network (ANN) memerlukan perangkat keras dan perangkat lunak antara lain :
4.1.1. Perangkat Keras
Spesifikasi perangkat keras yang digunakan untuk perancanaan sistem pada penelitian ini adalah sebagai berikut :
1. Prosessor Intel Core i5 @ 3,4 GHz.
2. Kapasitas memori RAM sebesar 8 GB 1600 MHz DDR3.
3. Sistem Operasi macOSSierra.
4. Graphics NVIDIA GeForce GTX 775M 2048MB.
5. Hard Drive memiliki kapasitas 1TB.
4.1.2. Perangkat Lunak
Spesifikasi perangkat lunak yang digunakan untuk perancangan sistem pada penelitian ini adalah sebagai berikut :
1. Bahasa pemrograman yang digunakan adalah python versi 3.5, HTML, dan javascript
2. PyCharm IDE versi 2018.2.1 (Community Edition)
3. Library yang digunakan Tensorflow 1.1.0, Numpy 1.12.0, Sklearn 0.18.1, Myo Python 0.2.2, Flask 1.1.1.