KAPAL CEPAT BERBAHAN BAKAR DENGAN SISTEM
KENDALI JAUH (FUEL ENGINE REMOTE CONTROL /
FERC) HYD AMPHILIVE
Krisna Bayu Setiawana1, a *, Latif Tri Nugraha2,b dan Karno Malau3,c 1Lemberang RT 3/2 Sukaraja, Kabupaten Bayumas, Jawa Tengah,Indonesia 2 Brongsongan RT02/03 Sidorejo, Bendosari, Sukaharjo, Jawa Tengah, Indonesia
3Togabasir, Pinangsori, Tapanuli Tengah, Sumatera Utara, Indonesia a[email protected], b[email protected],
Abstrak
“AMPHILIVE FE1” Adalah sebuah kapal yang didesain oleh team Roboboat dari Universitas Diponegoro dengan desain Mono Hull dan yang diadopsi dari kapal BASARNAS (Badan SAR Nasional) dengan nama kapal “SAR RS161” buatan Norwegia yang tipenya adalah Rescue / Salvage Ship untuk dapat mengikuti “Kontes Kapal Cepat Tak Berawak Nasional (KKCTBN) Tahun 2016” yang dilaksanakan oleh Direktorat Jenderal Pembelajaran dan Kemahasiswaan, Kemenristekdikti Republik Indonesia bekerjasama dengan Politeknik Perkapalan Negeri Surabaya (PPNS). Kapal ini menggunakan sistem Fuel Engine dan mampu bergerak dengan kendali jarak jauh menggunakan Remote Control dilengkapi sebuah motor penggerak yang berbahan bakar cair yang dihubungkan dengan sistem control, serta komponen lainnya untuk melakukan gerakan manuver dan lainnya untuk memenuhi syarat lomba. Desain body hull, kapal ini didesain dengan bantuan Software Autocad dan DelftShip. Sehingga dengan adanya desain ini dapat menjawab tantangan global dalam tindakan pertolongan dan evakuasi korban kecelakaan laut maupun bencana laut. Kompetisi ini memberikan wadah kepada mahasiswa untuk menumbuhkan kreatifitas dalam rancang bangun kapal, sistem penggerak, serta optimasi dalam navigasinya. Sehingga dalam kegiatan ini desain konsep kapal ini kami laksanakan dari tahap pemilihan jenis Body hull, kemudian merancang dan menganalisa desain Body Hull, lalu menyiapkan serta memasang rangkaian komponen dan system fuel engine sebagai penggerak kapal, kemudian dilakukan Trial kapal dalam menyelesaikan misi Manuvering test dan Speed test. Kata Kunci : Miniatur atau replika kapal, KKCTBN,RC Fuel Engine,
Manuvering Test, Speed Tes
I. LATAR BELAKANG
Kondisi geografis negara Indonesia yang merupakan negara kepulauan, Pemerintah mengembangkan pelayaran sebagai salah satu sarana pengangkutan yang dijadikan andalan untuk meningkatkan kesatuan, persatuan dan ekonomi negara. Total luas perairan laut Indonesia kurang lebih 8.800.000 Km2.
Dalam perkembangannya frekuensi pelayaran nasional meningkat cukup signifikan. Namun seiring dengan perkembangannya, tingkat kecelakaan dan insiden kapal yang terjadi di perairan Indonesia pun meningkat.
Laut dan garis pantai Indonesia memliki potensi strategis sebagai sumber ekonomi dan sumber kekayaan mineral tiada batas. Kekayaan ikan yang tak terhingga, aneka hasil tambang seperti minyak dan gas bumi, timah, batu bara, gas bumi. Namun, dibalik kekayaan alam tersebut, gelombang laut Indonesia menyimpan beragam kekhawatiran dan ancaman bencana laut.
Untuk menindak lanjuti dan/atau mencegah kecelakaan dan insiden tersebut, Sesuai Peraturan Presiden Nomor 99 Tahun 2007 tentang Badan SAR Nasional, Badan SAR Nasional memiliki tugas membantu Presiden dalam menyelenggarakan urusan pemerintahan di bidang pencarian dan pertolongan (search and rescue) [1]. Mengingat penting dan strategisnya jasa angkutan laut, perlu diselenggarakan tindakan pencegahan dan penanganan kecelakaan dan bencana laut.
Kontes Kapal Cepat Tak Berawak Nasional (KKCTBN) Tahun 2016, adalah kontes yang diselenggarakan bertema “Robot Kapal untuk Rescue (Mitigasi Bencana Nasional)” dengan demikian perserta harus membuat model kapal yang dapat menyelesaikan masalah tentang Bencana Nasional.
Amphilive FE1 didesain dengan bentuk rescue boat sesuai dengan tema yang mengusung kapal untuk kecelakaan laut dan bencana nasional dengan desain mono hull dengan mengedepankan kemampuan bermanuver dan kecepatan serta desain geladak kapal yang memungkinkan untuk dilakukan tindakan pertolongan dan evakuasi secara cepat.
II. DESIGN STRATEGY
HYD Amphilive dibagi terdiri dari 3 orang, dimana masing-masing anggota memiliki tugas dan tanggung jawab masing masing. Tugas tiap masing-masing anggota yaitu: sebagai teknisi mesin dan sistem dalam, sebagai penangung jawab penulisan proposal dan artikel, dan sebagai desain dan analisa kapal Amphilive FE1. Desain hull Amphilive FE1 dengan Mono Hull yang diadopsi dari kapal BASARNAS (Badan SAR Nasional) dengan nama kapal “SAR RS161” buatan Norwegia yang tipenya adalah Rescue / Salvage Ship untuk dapat mengikuti “Kontes Kapal Cepat Tak Berawak Nasional (KKCTBN) Tahun 2016” yang dilaksanakan oleh Direktorat Jenderal Pembelajaran dan Kemahasiswaan,
Kemenristekdikti Republik Indonesia bekerjasama dengan Politeknik Perkapalan Negeri Surabaya (PPNS). Amphilive FE1 didesain dengan bentuk rescue boat dengan desain mono hull dengan mengedepankan kemampuan bermanuver dan kecepatan serta desain geladak kapal yang memungkinkan untuk dilakukan tindakan pertolongan dan evakuasi secara cepat. Kelebihan desain monohull yaitu kemampuan bermanuver yang sangat baik dibanding dengan multihull, radius putaran kapal lambung mohohull sangat kecil, sehingga untuk menghindari rintangan di haluan kapal sangat mudah dengan berbelok arah.
III. MEKANIK
Amphilive FE1 didesain dengan kecepatan maksimun 20 knot, dengan dengan daya mesin 26 cc. Penempatan komponen pada kapal sangat diperhatikan untuk menjaga stabilitas tetap baik.
a) Konsep desain
Proses desain Amphilive FE1 adalah penelitian, mendirikan persyaratan desain, studi kelayakan, konseptualisasi, desain awal, rinci desain, dan rencana produksi. Pemilihan dari hull desain Amphilive FE1 berdasarkan komparasi beberapa desain hull yang dibuat, sehingga didapatkan hull yang paling efektif untuk kapal cepat rescue adalah monohull type V karena yang pertimabangan stabilitas dan manuver, terutama untuk misi kompetisi KKCTBN. Desain Amphilive FE1 ini didasarkan dari misi yang kebutuhan 360 derajat manuver mengintari rintangan bouy dan stabilitas yang tinggi. Desain awal meliputi desain lambung yang dampak penempatan dan berat maksimum komponen Amphilive FE1. Setelah desain awal, tim melakukan desain rinci dari Amphilive FE1 dengan menentukan apa yang komponen yang paling cocok dari Amphilive FE1 dan menambahkan spesifikasi sistem rinci untuk desain.
b) Hull Desaign
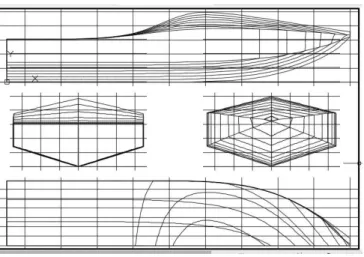
Gambar 1. Rencana garis Amphilive FE1.
Kapal monohull yang direncanakan ini adalah sebagai prototype kapal recue yang mana lebih ditekankan untuk daerah pulau pulau kecil dan fungsi kedua sebagai kapal wisata. Sarat kapal adalah 10 centimeter dengan kecepatan maksimal 20 knots. Hasil ini dihitung melalui penghitungan dan analisan hambatan, dan pertimbangan lintasan pada KKCTBN 2016. Dalam tahap desain, pertama sekali
dibuat adalah lines plan dari Amphilive FE1. Ukuran utama dari lines plan adalah data utama yang dibutuhkan dalam proses permodelan Amphilive FE1 dengan menggunakan software delfship dan Rhinoceros. Output dari tahap permodelan ini berupa rencana garis dari kapal Amphilive FE1. Pemodelan ini dilakukan agar analisa nantinya dapat menggunakan satu acuan model yang samasehingga analisis lebih akurat. Lalu dilakukan pehitungan dan analisa berupa analisa Hambatan, Stabilisitas dan hydrostatik.
Untuk menentukan mesin pada kapal, harus mengetahui besar hambatan total kapal [2]. Hambatan pada kapal Amphilive FE1dianalisa menggunakan hullspeed.
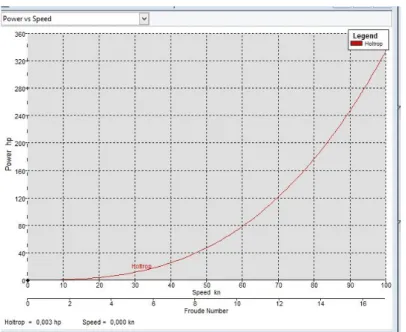
Data yang dibutuhkan meliputi kecepatan kapal dan data hidrostatik kapal. Metode yang digunakan adalah Holtrop dengan efisiensi 80 %. Hasil analisa menunjukan pada kecepatan maksimum 20 knot kapal memerlukan power sebesar 0,743 hp
(holtrop),hambatan maksimum yang diterima kapal pada kecepatan 20 knot sebesar 0,1 kN (Holtrop) untuk kapal Amhilive FE1. Data hasil analisa digambarkan ke dalam bentuk grafik power vs speed.
Gambar 2. Hasil analisa hambatan Amphilive FE1
Dari hasil analisa perhitungan hambatan diketahui dengan kecepatan 20 knot didapatkan hambatan sebesar 0,1 kN dan membutuhkan daya mesin induk sebesar 0,743 HP. Oleh karena itu digunakan diesel generator QJ 26 cc Inboard motor model 2-stroke – Cycle Diesel sebanyak satu buah yang di letakkan di buritan kapal.
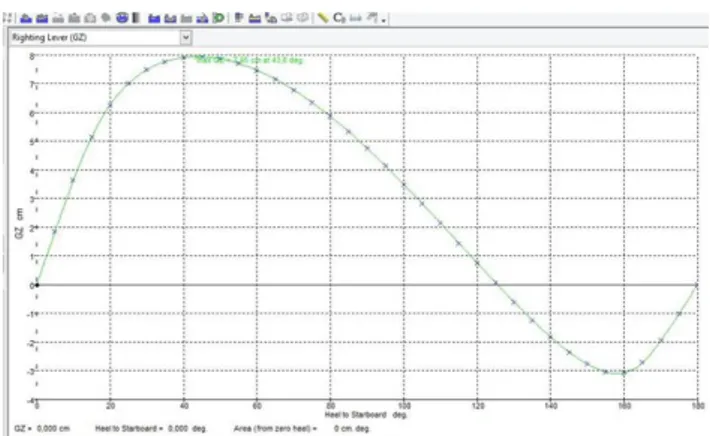
Stabilitas kapal dianalisa menggunakan software Hydromax dengan jenis analisa large angle stability. Sebelum analisa stabilitas dihitung,, komponen light weight tonnage (LWT) dan komponen dead weight tonnage (DWT) harus diketahui. Posisi titik berat dari komponen tersebut harus dapat diperhitungkan hingga mendekati keadaan yang terdapat di dilapangan. [3]
Gambar 3. Hasil analisa Stabilitas Amphilive
Standar analisa stabilitas menggunakan ketentuan yang terdapat pada International Maritime Organisation (IMO). Standard stabilitas yang ditetapkan IMO adalah mengenai lengan stabilitas (GZ). Pada penelitian hull amphilive ini perhitungan stabilitas menggunakan paket perhitungan pada software perkapalan dan ditinjau pada beberapa kondisi. Sedangkan persyaratan stabilitas mengacu pada standard requirements yang telah ditetapkan oleh IMO.
Kondisi kapal yang telah ditentukan menjadi rujukan data pada software Hydromax.
Kondisi kapal akan berpengaruh pada ketinggian sarat kapal, titik G, titik B, dan titik M kapal. Stabilitas juga dipengaruhi bentuk lambung kapal. Saat analisa, ketinggian sarat akan merubah kedudukan lambung kapal yang tercelup air. Hasil analisa diperiksa kesesuaiannya dengan standar IMO.
Setalah dilakukan analisa terhadap hull amphilive selanjutnya adalah dengan membuat dalam bentuk prototype. Hull dibuat dari bahan serat glass kemudian disiram dengan resin, proses pembutan hull dilakukan di dalam cetakan dari semen. Alasan dari pemilihan cetakan semen karena harga yang relatif mudah dan lebih cepat kering.
Hasil perhitungan hidrostatik, prototype kapal rescue Amphilive FE1 mempunyai displacement = 20 kg, Cb = 0,58 , LCB = 0,36 m (dari FP) .
Tabel 1. Ukuran utama Amphilive FE1
Bentuk Lambung Monohull Sarat Kapal 10 centimeter Lebar Kapal 36 centimeter Panjang maksimun 1 meter Displacement 20 kg Daya mesin 0,8 hp Kec. Maksimun 20 knots Material Fiberglass
c) Sistem Elektrik
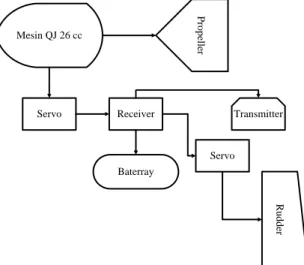
Amphilive FE1 menggunakan sumber daya elektrik menggunakan baterai lipo 2200mah 3S ,11,1 volt. Kapal dikontrol bermanuver dengan Transimitter. Transmitter berfungsi sebagai alat penyaimpai perintah dari pilot ke kapal [4]. Data yang dikirim dari transmitter kemudian di terima oleh ubec dan kemudian digunakan untuk mengerakan 2 servo, fungsi servo tersebut masing2 untuk menggerakan trotel gas untuk menarik kabel gas dari karburator mesin sesuai dengan kecepatan yang diinginkan, dan menggerakan rudder untuk manuver. Atau dapat dilihat pada gambar diagram berikut.
Mesin QJ 26 cc P ro p el le r Receiver R u d d er Servo Baterray Transmitter Servo
Gambar 6. Diagram sistem dalam Amphilive FE1 d) Sistem Propulsi
Amphilive FE1 menggunakan mesin qj 26cc berbahan bakar bensin 2 langkah atau 2 tak sebagai penggerak propeller 4 inchi 3 blade, adapaun komponen sistem penggerak yaitu:
crankshaft, collect, fleksshaft, shaft, drive shaft, dan strut. Propeller beputar karena mesin hidup dan memutar cranksaft yang tersambung langsung dengan collect yang fungsinya untuk menyambungkan ke flekshaft. Shaft dilanjutkan ke drive shaft yang berada di strut, yang langsung tersambung dengan propeller sebagai propulsinya. Untuk mengatur kecepatan kapal dengan menggunakan servo yang menggerakkan trotel gas untuk menarik kabel gas dari karburator mesin untuk mengatur speed kapal. Sedangkan untuk bergerak ke kiri dan ke kanan kapal, menggunakan rudder 13 cm dengan lebar 2 cm yang digerakkan oleh servo, servo bergerak sesuai dengan perintah dari transmitter.
Gambar 7. Hardware dan permesinan Amphilive FE1 IV. KESIMPULAN
Pada penelitian yang sudah kami lakukan, tim sudah berhasil menyelesaikan pembuatan hull dengan analisa hambatan, stabilitas dan hidrostatik, perancangan sistem dalam kapal, serta pengembangan sitem elektrik yang lebih efesien. Hasil dari kegiatan ini di dapat kapal Amphilive dengan tingkat stabilitas, manuver, dan kemampuan melewati rintangan pada KKCTBN 2016.
V. ACKNOWLEDGEMENT
HYD Amphilive mengucapkan terima kasih sebesar-besaranya kepada semua pihak yang turut serta membantu terlaksananya pembuatan kapal Amphilive FE1, terkhusus kepada Lab Las Teknik Perkapalan, Himaspal, dan Hydrotech. Kami tidak luput juga mengucapkan terima kasih kepada Bapak Belian Arswendo ST.,MT. yang turut serta membimbing kami sampai kegiatan ini terlaksana dengan baik.
DAFTAR PUSTAKA
[1] Sunardi, S., 2016. Applied Lamination Fiberglass To Protect And Maintenance Wood
Fishing Vessel. Journal of Innovation and Applied Technology, 2(1), pp.246-250.
[2] Oni, R. and Utama, I.K.A.P., 2015. Analisa Pengaruh Bentuk Lambung Axe Bow pada
Kapal High Speed Craft terhadap Hambatan Total. Kapal, 12(2), pp.78-87.
[3] Rosa, F., 2014. Analisis Stabilitas Kapal Isap Timah dan Model Katamaran
(Catamaran). Mesin, 2(1).
[4] Budiharto, W., 2009. MembuatSendiiri Robot Cerdas+ CD (REVISI). Elex Media