See discussions, stats, and author profiles for this publication at: http://www.researchgate.net/publication/269631049
TICA 2013 ke-4 Judul Bahasa Indonesia:
Simplifikasi Pengendali PID-Fuzzy dan
Implementasinya pada PLC
CONFERENCE PAPER · MAY 2014
READS
83
3 AUTHORS, INCLUDING:
Hari Maghfiroh
Gadjah Mada University
6PUBLICATIONS 1CITATION
TICA 2013 ke-4 Judul Bahasa Indonesia: Simplifikasi
Pengendali PID-Fuzzy dan Implementasinya pada
PLC
The 4
th
TICA 2013 English Title : Simplification of
PID-Fuzzy Controller and Its Implementation on PLC
Hari Maghfiroh
1,a, Oyas Wahyunggoro
2,bdan A.I. Cahyadi
3,c1,2,3Jurusan Teknik Elektro dan Teknologi Informasi
PID(Proporsional Integral Derivatif) adalah salah satu pengendali yang telah lama digunakan [1] karena kemudahan dan kesederhanaan aplikasinya [2][3]. Menurut H. Maghfiroh salah satu kekurangan PID adalah kemempuannya turun ketika kondisi sistem berubah( tidak adaptif) [4]. Untuk mengatasi hal ini, para ilmuwan menggabungkan PID dengan algoritma lain seperti PID - Fuzzy [2] [5] [6], PID Neural Netwok [2] [7], PID Algoritma Genetika [2] [8].
Pada sistem PID-Fuzzy, Fuzzy dipakai untuk men-tuning nilai parameter PID(KP, KI, dan KD) sehingga nilainya dapat
berubah menyesuaikan kondisi sistem(pengendali bersifat adaptif). Banyak struktur PID Fuzzy yang diusulkan para ilmuwan diantaranya oleh H.Liu [3] yaitu Fuzzy untuk men-tuning ketiga parameter PID(KP, KI, dan KD). Sistem tersebut
memiliki kinerja yang cukup baik, tetapi membutuhkan prosesor yang kuat jika diimplementasikan pada hardware karena komputasi untuk men-tuning ketiga parameter PID secara online cukup berat. Sedangkan A.K. Nugroho mengusulkan PID Fuzzy dengan Fuzzy hanya mentuning nilai KP, nilai KI dan KD konstan. Akan tetapi, setelah
melakukan uji ulang, tuning pada bagian KP saja tidak begitu
memberikan pengaruh yang signifikan.
Pada penelitian ini, diusulkan sistem PID Fuzzy dengan menggunakan struktur PID yang lain dan dirancang sedemikian rupa sehingga tuning Fuzzy hanya untuk parameter KP tetapi dapat berpengaruh pada parameter lain (KI
dan KD). Sistem, yang diusulkan disimulasikan dengan
MATLAB Simulink dan diimplementasikan pada PLC dengan plan motor DC.
II. PID - FUZZY
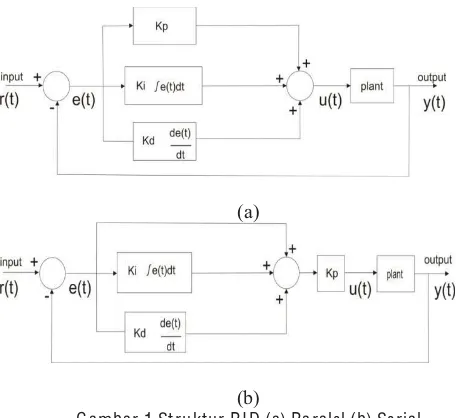
A. PID
(a)
(b)
G ambar 1 Struktur PI D (a) Paralel (b) Serial
B. Fuzzy
Logika Fuzzy adalah algoritma pengambilan keputusan yang berdasarkan logika pikiran manusia[9]. Logika Fuzzy telah banyak digunakan dalam dunia kontrol, dan sering disebut Fuzzy Logic Controller(FLC). Ada tiga komponen utama dalam FLC yaitu: Fuzzifikasi, Inferensi dan Rule Base, serta Defuzzifikasi[10] [11], Gambar 2. Keuntungan utama dari pengendali ini adalah tidak memerlukan model matematis sistem secara tepat [12] [13].
G ambar 2 K omponen F uzzy [10]
III. SIMPLIFIKASI PID-FUZZY
Pada penelitian ini diusulkan sistem PID-Fuzzy dengan simplifikasi, yaitu dengan menggunakan Fuzzy hanya untuk men-tuning satu parameter PID yaitu KP. Seperti disebutkan
sebelumnya, kebanyakan sistem PID-Fuzzy yang telah ada yaitu Fuzzy untuk men-tuning ketiga parameter PID, menggunakan struktur PID paralel. Sistem yang diusulkan disini dengan menggunakan PID serial sehingga perubahan nilai pada KP juga mempengaruhi nilai KI dan KD. Nilai awal
parameter PID pada simulasi ditentukan dengan auto tuning MATLAB.
A. PID (parallel) Fuzzy
Blok diagram simulasi sistem PID paralel Fuzzy(FP paralel) dapat dilihat pada Gambar 3. Susunan FP paralel terletak dalam subsistem FPID, Gambar 4. Terlihat masing masing parameter(KP, KI, dan KD) di-tuning oleh satu
komponen Fuzzy.
Sistem Fuzzy yang dipakai menggunakan fungsi keanggotaan segitiga dengan lima keaggotaan(NB, NS, ZE, PS, dan PB) dengan input berupa error(E) dan perubahan error(CE) sedangkan outputnya nilai parameter PID, Gambar 5. Setiap blok Fuzzy memiliki 25 aturan sehingga untuk sistem ini ada 75 aturan. Pada tahap defuzzifikasi digunakan metode Centroid.
G ambar 3 PI D paralel - F uzzy
G ambar 4 Subsistem F PI D
G ambar 5 F ungsi Keanggotaan F uzzy
B. PID (serial) Fuzzy
Sistem PID serial Fuzzy(FP seri) disusun mengunakan PID serial, Fuzzy hanya dipakai untuk mentuning KP. Seperti
dijelaskan sebelumnya, pada PID serial, perubahan nilai KP
juga mempengaruhi KI dan KD sehingga diharapkan hanya
dengan mengubah nilai KP keseluruhan sistem kendali dapat
lebih adaptif. Komponen Fuzzy yang dipakai sama dengan yang digunakan pada FP paralel tetapi disini hanya membutuhkan sepertiga aturannya(25 aturan) karena parameter PID yang di-tuning hanya KP. Pengurangan jumlah
G ambar 6 PI D serial F uzzy
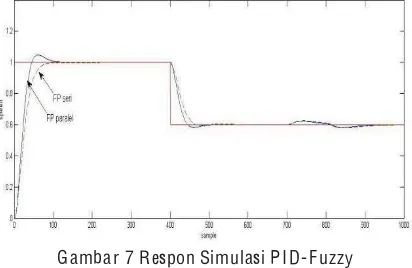
C. Hasil Simulasi dan Analisa
Gambar 7 menunjukkan hasil simulasi sistem FP paralel dan FP seri. Terlihat FP seri memiliki settling time yang lebih cepat dan tidak terjadi overshoot, sedangkan pada PF paralel terjadi overshoot. Ketika set-point sistem diturunkan dari 1 menjadi 0,6 , FP seri dapat mengikuti dengen lebih cepat dan tanpa undershoot, sedangkan pada FP paralel masih terjadi
undershoot. Terakhir, ketika terjadi noise pada sample ke-800 kedua pengendali memberikan respon yang hampir sama.
G ambar 7 Respon Simulasi PI D-F uzzy
IV. IMPLEMENTASI HARDWARE
Sistem PID Fuzzy yang telah dibuat kemudian diimplementasikan pada PLC untuk kendali kecepatan motor DC dengan susunan seperti Gambar 8. Implementasi pada PLC ini dipilih karena PLC banyak dipakai di industri dan untuk mengetahui signifikansi reduksi aturan Fuzzy yang telah dilakukan.
G ambar 8 Susunan A lat Pengujian
Sistem diuji dengan set-point 500 rpm dan waktu cuplik data 0,05 detik, kemudian data dirata-rata setiap sepuluh cuplik untuk mengurangi riak pada kurva yang dihasilkan. Penentuan nilai awal parameter PID dilakukan dengan metode Ziegler Nichols Quarter Decay. Gambar 9 menunjukkan grafik hasil pengujian. Grafik warna biru adalah hasil dari FP paralel sedang grafik warna merah adalah hasil dari FP seri. Terlihat FP paralel memiliki risetime yang lebih cepat, tetapi lama mencapai set-point dan terjadi osilasi sebelum mencapai
set-point. Sedangkan FP seri dapat mencapai set-point dengan cepat dan tanpa overshoot. Pembuatan sistem ini berdasarkan hasil simulasi dengan sedikit penyesuaian dengan hardware. Selain komputasi yang lama, FP paralel juga memerlukan waktu yang lama untuk menentukan aturan Fuzzy dibanding FP seri karena jumlah aturan yang dipakai lebih banyak.
G ambar 9 Respon H ardware PI D-F uzzy
V. KESIMPULAN
Berdasarkan hasil analisa baik dari hasil pengujian simulasi maupun implementasi hardware dapat disimpulkan bahwa:
1) Hasil simplifikasi sistem PID-Fuzzy yang menggunakan PID parallel menjadi PID serial memberikan kesederhaan dalam penyusunannya.
2) Sistem PID serial Fuzzy mampu mengurangi beban komputasi sistem sehingga respon yang dihasilkan lebih cepat.
UCAPAN TERIMA KASIH
Terima kasih kepada Jurusan Teknik Elektro dan Teknologi Informasi UGM yang telah memfasilitasi penelitian ini. DIKTI yang memberikan Beasiswa Unggulan kepada Penulis dan semua pihak yang membantu penelitian ini.
DAFTAR PUSTAKA
[1]PID control in Control systems, Robotics and
Automation, vol. II, no. Encyclopedia of Life Support Systems (EOLSS), Developed under the Auspices of the UNESCO, Eolss Publishers, Oxford,UK., 1989. [4]H. Maghfiroh, O. Wahyunggoro, A. I. Cahyadi, and S. Praptodiyono,
-Hybrid Tuning to Improve Control Performance in Speed
[7]W. Yan, D. #.)+##.& +~*' 20''&1')4,#3+/./( -/3/1$#2'&/.+.3',,+)'.3%/.31/,5/,./ [8] '1'+1# '-$'1 #.& +.3/~'.'3+% ,)/1+3*- #2'&
System Identification and PID Tuning for Optimum Adaptive
Cont1/,./ 0028, 2005.
[9] "#&'* ~4 /)+% /-043+.) 6+3* /1&2 IE E E
TRANSACTIONS ON F UZZY SYSTEMS, vol. 4, no. 2, pp. 103111, 1996.
[10]#'-+#.~.3',,+)'.34/.31/,,'1+.+.Application
of Fuzzy Control, Genetic Algoritms and Neural Nerworks, vol. 2, R.Lowen and A.Verschoren, Eds. Springer, 2008, pp. 241260.
[11]T. J.Ross, F UZZY LO GIC WITH ENGINEERING. Singapore: John Wiley
& Sons, 2010.
[12] !+#/~0''& /.31/, 23'- #2'& /. -01/5'& 4-PID hybrid
/.31/,(/1+1'%3411'.3/3/100395, 2010.
[13] #-# "#*+& #*+1 " *#,+& #.& '*-#.~'#,-Time