viii DAFTAR ISI
Halaman
SAMPUL DALAM ... i
LEMBAR PENGESAHAN ... ii
LEMBAR PERNYATAAN ... iii
KATA PENGANTAR ... iv
ABSTRAK ... vi
DAFTAR SINGKATAN DAN ISTILAH ... xv
DAFTAR PUSTAKA
1.4 Tujuan Penelitian ... 2
1.5 Metode Penelitian ... 3
1.6 Sistematika Penulisan ... 3
BAB II ... 5
LANDASAN TEORI ... 5
ix
2.1.1. Konversi Energi PLTA ... 6
2.1.2. Komponen-komponen PLTA ... 9
2.1.3. Proses Bisnis Unit ... 14
2.2 Relay ... 15
2.3 Transformator (Trafo) ... 17
2.4 Mikrokontroler ... 18
2.4.1. Arsitektur ATmega16 ... 19
2.4.2. ADC (Analog to Digital Converter) ... 21
2.5 BASCOM AVR ... 23
2.6 Logika Fuzzy ... 24
2.6.1. Himpunan Fuzzy ... 25
2.6.2. Fuzzifikasi... 28
2.6.3. Aturan Dasar Logika Fuzzy ... 29
2.6.4. Mesin Penalaran Kontrol Logika Fuzzy (Inference Engine) ... 30
2.6.5. Defuzzifikasi ... 31
2.6.6. Metode Fuzzy Mamdani ... 32
2.6.7. Metode Fuzzy Sugeno ... 32
2.6.8. Metode Fuzzy Tsukamoto ... 33
BAB III ... 35
METODE PENELITIAN ... 35
3.1 Studi Literatur ... 35
3.2 Observasi Lapangan ... 35
3.3 Diskusi ... 36
3.4 Perancangan ATS ... 37
x
3.5.1. Komponen-komponen yang digunakan dalam pembuatan prototype
ATS ... 39
3.6 Pembuatan ATS secara Software ... 44
3.6.1. Pembuatan Rangkaian di Proteus versi 8.4... 44
3.6.2. Pembuatan script Program ATS ... 45
3.7 Prinsip Kerja ATS ... 46
3.7.1. Pembuatan Logika Fuzzy untuk ATS di MATLAB ... 46
BAB IV ... 51
HASIL DAN PEMBAHASAN ... 51
4.1 Analisa Respon Waktu di Aplikasi Proteus 8.4 ... 51
4.1.1. Kondisi Tegangan Jala-jala 30 kV Normal ... 52
4.1.2. Kondisi saat Tegangan Jala-jala di RangeNormal dan Frekuensi di RangeWarning ... 53
4.1.3. Kondisi saat Tegangan Jala-jala di RangeWarning dan Frekuensi di RangeWarning ... 55
4.1.4. Kondisi saat Tegangan Jala-jala di RangeWarning dan Frekuensi di RangeWarning ... 57
4.2 Hasil Pengukuran ... 59
BAB V ... 65
SIMPULAN DAN SARAN ... 65
5.1 Kesimpulan ... 65
xi
DAFTAR GAMBAR
Halaman
Gambar 2. 1 Proses Bisnis PLTA [10] ... 5
Gambar 2. 2 Prose Konversi Energi PLTA [10] ... 7
Gambar 2. 3 Bendungan [10] ... 9
Gambar 2. 4 Turbin Francis [10] ... 10
Gambar 2. 5 Posisi Turbin Francis [10] ... 10
Gambar 2. 6 Turbin Air [10] ... 12
Gambar 2. 7 Stator [10] ... 13
Gambar 2. 8 Rotor [10] ... 13
Gambar 2. 9 Skema Jalur Transmisi Listrik [10] ... 14
Gambar 2. 10 Gambar Jaring-jaring air PLTA Plengan [14] ... 14
Gambar 2. 11 Simbol relay [3] ... 16
Gambar 2. 12 Hubungan kumparan primer dan sekunder trafo [3] ... 17
Gambar 2. 13 Konfigurasi pin ATmega16 [12] ... 19
Gambar 2. 14 Arsitektur Mikrokontroller [12] ... 20
Gambar 2. 15 Proses pengakuisisian sinyal [6] ... 21
Gambar 2. 16 Aplikasi BASCOM AVR ... 24
Gambar 2. 17 Prinsip Kerja Logika Fuzzy [2] ... 25
Gambar 2. 18 Contoh keanggotaan himpunan temperatur atau suhu [2]... 26
Gambar 2. 19 Contoh keanggotaan himpunan umur [2] ... 26
Gambar 2. 20 Contoh keanggotaan himpunan kecepatan [2] ... 27
Gambar 2. 21 Blok Diagram Kontrol Logika Fuzzy [2] ... 27
xii
Gambar 2. 23 Proses perubahan dari crisp/nilai tegas menjadi fuzzy input [2] .... 29
Gambar 2. 24 Operasi max-min secara grafis [2] ... 31
Gambar 2. 25 Grafik Metode Fuzzy Tsukamoto [11] ... 34
Gambar 2. 26 Catu Daya Unit ... 40
Gambar 2. 27 LCD Display 16x2 M1632 ... 41
Gambar 3. 1 Blok Diagram ATS ... 37
Gambar 3. 2 Blok Diagram ATS Secara Rinci ... 38
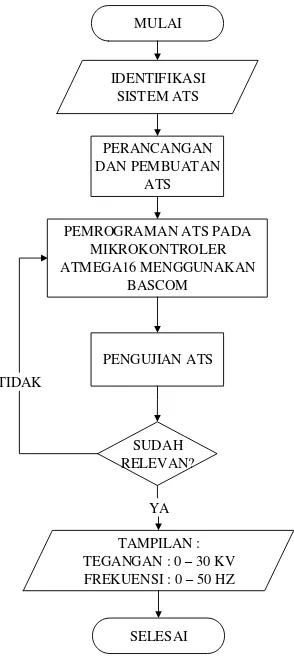
Gambar 3. 3 Flowchart Perancangan pembuatan ATS ... 38
Gambar 3. 4 Mikrokontroler ATMega16 ... 40
Gambar 3. 5 Relai 5 VDC Merk Songle ... 42
Gambar 3. 6 Motor 5 VDC ... 43
Gambar 3. 7 Potensio 1 KΩ ... 43
Gambar 3. 8 Rangkaian ATS ... 44
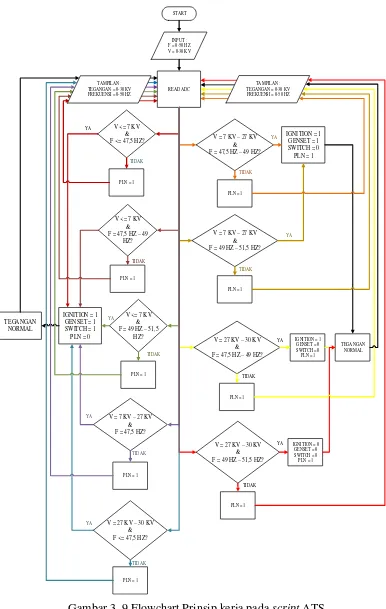
Gambar 3. 9 Flowchart Prinsip kerja pada script ATS ... 45
Gambar 3. 10 FIS Editor ATS ... 47
Gambar 3. 11 FIS Variabel Tegangan ... 47
Gambar 3. 12 Variabel Frekuensi ... 48
Gambar 3. 13 Variabel Output ... 49
Gambar 3. 14 Rule Editor ... 49
Gambar 3. 15 Rule Viewer ATS... 50
Gambar 3. 16 Surface ATS ... 50
Gambar 4. 1 Rangkaian ATS Mikrokontroler kondisi tegangan jala-jala normal 52 Gambar 4. 2 Tampilan Osiloskop Rangkaian ATS ... 52
xiii
Gambar 4. 4 Tampilan Osiloskop saat tegangan Relai PLN di ATS hilang ... 54
Gambar 4. 5 Tampilan Osiloskop saat tegangan Relai PLN hilang dan Relai Ignition ON ... 54
Gambar 4. 6 Kondisi Tegangan “Warning” (26774,19 V) dan Frekuensi “Warning” (47,56 Hz) ... 55
Gambar 4. 7 Tampilan Osiloskop saat Genset Start ... 56
Gambar 4. 8 Tampilan Osiloskop saat Relai Genset ON ... 56
Gambar 4. 9 Kondisi Tegangan “Low” (0,0 V) dan Frekuensi “Low” (40,03 Hz) ... 57
Gambar 4. 10 Tampilan Osiloskop saat Switch ... 58
Gambar 4. 11 Tampilan Osiloskop saat Relai Switch ... 58
Gambar 4. 12 Foto Prototype ATS ... 59
Gambar 4. 13 Minimum Sistem Mikrokontroler ATmega16 ... 59
Gambar 4. 14 Multimeter Merk Heles UX-837 ... 60
Gambar 4. 15 Grafik perbandingan switching otomatis dan manual ... 61
Gambar 4. 15 Rule Viewer pengujian ATS kondisi PLN ON ... 62
Gambar 4. 16 Prototype ATS Pengujian PLN ON ... 63
Gambar 4. 17 Rule Viewer pengujian ATS kondisi Ignition ... 63
xiv DAFTAR TABEL
Halaman
Tabel 2. 1 Contoh matrik aturan dasar perancangan kontrol logika fuzzy [2] ... 30
Tabel 3. 1 Data kerugian kWh PLTA Plengan tanggal 13 Desember 2015 [9] .... 36
Tabel 3. 2 Rule Logika Relai ATS ... 39
Tabel 3. 3 Identifikasi PIN LCD Display 16 x 2 M1632 ... 41
Tabel 4. 1 Rule Fuzzy ATS ... 51
Tabel 4. 2 Hasil Pengukuran Tegangan kontak Relai ATS menggunakan
Multimeter Merk Heles UX-837 ... 60
xv
DAFTAR SINGKATAN DAN ISTILAH
AC = Alternating Current
ADC = Analog to Digital Converter
ATS = Automatic Transfer Switch
AVR = Automatic Voltage Regulator
BASCOM = Basic Compiler
DC = Direct Current
GGL = Gaya Gerak Listrik
LCD = Liquid Crystal Display
PLN = Perusahaan Listrik Negara
1 BAB I
PENDAHULUAN
1.1Latar Belakang
PLTA Plengan merupakan Pembangkit listrik yang menggunakan air sebagai energi primernya. Terdapat 5 (lima) Unit pembangkit dengan total kapasitas terpasang 6.875 kW. Hasil pembangkitan dari PLTA Plengan dikirim ke Gardu Induk dengan besar tegangan 6 kV yang kemudian dinaikkan oleh Trafo Step up
menjadi 30 kV yang akan dikirim ke PLTA Lamajan. Pada Unit Pembangkit di PLTA Plengan, 1 unitnya memiliki 2 buah Motor yaitu Motor Inlet Valve yang berfungsi untuk mensuplai oli bertekanan ke Inlet Valve untuk menggerakkan (buka-tutup) Inlet Valve. Kedua yaitu Motor Governor yang berfungsi mengatur bukaan Sudu Atur masuknya debit air ke Turbin. Kedua Motor ini menggunakan suplai Pemakaian Sendiri 380 V yang tegangannya berasal dari luar atau Tegangan sistem 30 kV yang diturunkan menjadi 380 V oleh Trafo Step down. Apabila tegangan dari luar hilang, maka Unit pembangkit tidak dapat beroperasi
karena tidak ada tegangan dari luar. Oleh karena itu, Unit PLTA Plengan harus bisa beroperasi Mode Line Charging / Black Start, dimana Unit beroperasi dengan
tegangan untuk Peralatan bantu berasal dari Genset (Generator Set) 3 fasa 50 Hz untuk pengisian tegangan jaringan 30 kV. Pada tanggal 13 Desember 2015 di PLTA Plengan telah terjadi Blackout lokal selama 13 jam yang menyebabkan hilangnya produksi kWh sebesar 89.375 kWh.
Agar Unit pembangkit dapat dioperasikan Mode Black Start / Line charging, PLTA Plengan membutuhkan saklar otomatis untuk memindahkan catu daya listrik dari sumber listrik PLN ke sumber listrik Genset dan sebaliknya. Oleh karena itu, dibuatlah perangkat dari Mikrokontroller ATmega16 yang disebut dengan ATS (Automatic Transfer Switch).
2 diperbaiki respon sistemnya menggunakan Logika Fuzzy.
2. Rancang bangun Automatic Transfer Switch menggunakan Mikrokontroler ATmega16.
3. Tidak menggunakan Sensor Frekuensi sebenarnya, sehingga sebagai Sensor Frekuesi diambil dari tegangan suplai input 5 VDC yang dimasukkan ke Port ADC Mikrokontroler yang selanjutnya diolah di bahasa pemrograman BASCOM sebagai Input Sensor Frekuensi.
4. Tidak dibahas mengenai analisis pengaruh PLTA Plengan beroperasi Mode
Line Charging pada jaringan 30 kV.
1.4 Tujuan Penelitian
3 1.5 Metode Penelitian
1. Studi Literatur
Yaitu dengan membaca buku-buku referensi atau karya tulis serta mempelajari dokumen / manual book dari perusahaan dan media internet yang berhubungan dengan topik yang akan dibahas.
2. Observasi Lapangan
Metode ini digunakan untuk mendapatkan data dengan observasi langsung di
lapangan, dengan mencari sumber referensi tentang data teknik .perlatan yang bersangkutan.
3. Diskusi
Metode ini dilakukan dengan cara mendiskusikan segala sesuatu yang berhubungan dengan ATS pada dosen pembimbing serta karyawan dan pejabat terkait di PT. Indonesia Power.
1.6 Sistematika Penulisan
Untuk memudahkan dalam penulisan tugas akhir, penulis membuat sistematika dalam 4 bab, yaitu :
BAB I PENDAHULUAN
Berisi tentang latar belakang, rumusan masalah, batasan masalah, tujuan penelitian dan metode penelitian.
BAB II LANDASAN TEORI
4 BAB III METODE PENELITIAN
Berisi tentang penjabaran sistem yang akan dikerjakan dan dianalisa, sarana pengolahan seperti hardware dan software serta desain implementasi.
BAB IV HASIL DAN PEMBAHASAN
Pada bab ini akan dibahas tentang hasil analisa dari sistem yang akan dibuat dan telah dianalisa berdasarkan data yang didapat
setelah melakukan penelitian terhadap alat yang akan dikerjakan.
BAB V SIMPULAN DAN SARAN
Berisi tentang kesimpulan hasil analisa dan data yang didapat dari hasil penelitian, sertan saran-saran yang terkait untuk memaksimalkan kerja sistem.
5 BAB II
LANDASAN TEORI
2.1 PLTA (Pembangkit Listrik Tenaga Air)
Pembangkit Listrik Tenaga Air atau disingkat PLTA adalah salah satu pembangkit listrik yang menggunakan tenaga air sebagai penggerak turbinnya. PLTA adalah pembangkit listrik yang memanfaatkan air sebagai energi primernya. Pada dasarnya energi air yang dimanfaatkan tersebut adalah energi potensial, yaitu energi yang berdasarkan pada perbedaan ketinggian. Energi potensial tersebut akan timbul jika air mengalir dari tempat yang tinggi menuju ke tempat yang lebih rendah. Energi aliran air tersebut dapat dimanfaatkan untuk memutar turbin air yang dihubungkan dengan sebuah generator listrik. Putaran Generator tersebut selanjutnya diubah menjadi energi listrik dan disalurkan melalui saluran Transmisi ke Gardu Induk untuk diolah tegangannya dan didistribusikan ke konsumen [10].
6 2.1.1. Konversi Energi PLTA
Konversi energi pada PLTA bermula dari Energi Potensial yang berada di DAM. Air sebagai bahan baku PLTA dapat diperoleh dapat diperoleh dengan berbagai cara misalnya, dari sungai secara langsung disalurkan untuk memutar turbin, atau dengan cara ditampung dahulu (bersama – sama air hujan) dengan menggunakan kolam tando atau waduk sebelum disalurkan untuk memutar Turbin. Karena air ini ditampung dan juga pengaruh head antara air yang di bendung dengan turbin air maka air ini memiliki energi yaitu energi potensial.
Kemudian dengan memanfaatkan gaya Gravitasi Bumi dengan ketinggian tertentu dari Penstock / saluran air, maka Energi Potensial berubah menjadi Energi Kinetik. Aliran air dengan kecepatan tertentu ini kemudian memutarkan Turbin yang dikopel ke Generator. Maka Energi Kinetik berubah menjadi Energi Mekanik oleh Turbin dan Energi Mekanik berubah menjadi Energi Listrik oleh Generator berdasarkan Hukum Faraday yang menyatakan jika sebatang penghantar berada pada medan magnet yang berubah-ubah, maka pada penghantar tersebut akan terbentuk gaya gerak listrik.
7
Gambar 2. 2 Prose Konversi Energi PLTA [10]
Untuk bisa menghasilkan energi listrik dari Air, maka harus melalui beberapa tahapan konversi energi, yaitu :
1. Energi Potensial
Energi potensial yaitu energi yang terjadi akibat adanya beda potensial, yaitu akibat adanya perbedaan ketinggian / head. Besarnya energi potensial yaitu :
... (2.1) Dimana :
Ep : Energi Potensial
m : Massa (kg)
g : Gravitasi (9,8 kg/m2)
8 2. Energi Kinetik
Energi kinetik yaitu energi yang dihasilkan akibat adanya aliran air sehingga timbul air dengan kecepatan tertentu.
... (2.2)
Energi mekanik yaitu energi yang ditimbulkan akibat adanya pergerakan Turbin. Besarnya energi mekanik tergantung dari besarnya energi potensial dan
energi kinetik.
Ketika Turbin berputar, maka Rotor juga berputar sehingga menghasilkan energi listrik sesuai dengan persamaan :
9 Dimana :
El : Energi Listrik v : Tegangan (Volt) i : Arus (Ampere) t : Waktu (Sekon)
2.1.2. Komponen-komponen PLTA
1. Bendungan
Bendungan berfungsi sebagai penampung air dan untuk mengatur agar gerak jatuh air tetap stabil [8]. Hal demikian dimaksudkan untuk menjaga agar listrik tetap dalam kondisi yang sama, tidak cepat atau lambat dan banyak atau sedikitnya listrik yang dihasilkan.
Gambar 2. 3 Bendungan [10]
2. Turbin
10
dengan gerak jatuh air. Setelah baling-baling berputar Turbin akan merubah energi kinetik menjadi energi mekanik.
Gambar 2. 4 Turbin Francis [10]
Gambar 2. 5 Posisi Turbin Francis [10]
3. Generator
11
magnetik dalam kumparan jangkar yang diam. Dalam hal ini kumparan medan terletak pada bagian yang sama dengan Rotor dari Generator.
Pada Generator terdapat Rotor dan Stator. Contohnya, Rotor terdiri dari 18 buah besi yang dililit oleh kawat dan dipasang secara melingkar sehingga membentuk 9 pasang kutub utara dan selatan. Jika kutub ini dialiri arus eksitasi DC dari Automatic Voltage Regulator (AVR), maka akan timbul medan magnet. Magnet yang berputar memproduksi tegangan di kawat setiap setiap kali sebuah kutub melewati coil yang terletak di Stator. Lalu tegangan inilah yang kemudian
menjadi listrik atau disebut dengan Garis Gaya Listrik (GGL) induksi. Agar Generator bisa menghasilkan listrik, ada 3 hal yang harus diperhatikan yaitu :
Putaran
Putaran Rotor dipengaruhi oleh frekuensi dan jumlah pasang kutub pada Rotor, sesuai dengan persamaan :
... (2.5) putaran Rotor sebesar 750 Rpm.
Magnet
12
... (2.6)
Dimana :
E : Gaya Elektromagnet B : Kuat medan magnet V : Kecepatan putar L : Panjang penghantar
Agar beban dihasilkan sesuai, maka yang bisa diatur adalah sifat kemagnetannya, sehingga agar beban yang dihasilkan sesuai, maka yang bisa diatur adalah sifat kemagnetannya yaitu dengan mengatur jumlah arus yang masuk. Makin besar arus yang masuk, makin besar pula nilai kemagnetannya begitu pula sebaliknya.
13
Gambar 2. 7 Stator [10]
Gambar 2. 8 Rotor [10]
4. Jalur Transmisi
14
Gambar 2. 9 Skema Jalur Transmisi Listrik [10]
…
2.1.3. Proses Bisnis Unit
15
PLTA Plengan terletak di kecamatan Pangalengan Kabupaten Bandung, 40 km kearah selatan kota Bandung tepatnya berada di kampung Kiara Sanding RT 01 RW 06 Desa Pulosari pada ketinggian 1246.70 meter di atas permukaan laut.
Sejarahnya PLTA Plengan mulai di bangun pada tahun 1918 dan beroperasi pada tahun 1922 sebanyak 3 (tiga) unit pembangkit dengan kapasitas (3 x 1050 kW), pada tahun 1960 di tambah 1 (satu) unit pembangkit dengan kapasitas (1 x 2000 kW). Pada tanggal 15 Agustus 1995 unit 1,2,3 & 4 PLTA Plengan direnovasi dengan kapasitas terpasang berubah menjadi unit 1,2 & 3 (3 x 1080
kW) dan unit 4 menjadi 2025 kW. Pada tahun 1996 PLTA Plengan di tambah 1 (satu) unit lagi dengan kapasitas terpasang 1610 kW relokasi dari PLTA Susukan. Jadi jumlah unit di PLTA Plengan ada 5 (lima) unit dengan total kapasitas terpasang 6875 kW [14].
PLTA Plengan adalah suatu pembangkit dengan sistem aliran langsung yang sumber utamanya memanfaatkan air dari sungai Cisangkuy & Cisarua dan di tambah dari bukaan Situ Cileunca melalui 2 (dua) buah Torn yaitu Pulo dan Palayangan. Situ Cileunca mendapat air dari situ Cipanunjang, kali Cilaki Beet dan kali Cibuniayu, sedangkan situ Cipanunjang mendapat air dari kali Cilaki, Cibolang, Cihurangan, Cikuningan dan Citambaga. air dari Pulo bergabung dengan sungai Cisangkuy dan air dari Torn Palayangan bergabung dengan sungai Cisarua, kemudian masing-masing sungai di bendung lalu di alirkan ke Kolam penerima, dari kolam penerima di alirkan ke lima turbin melalui dua buah Penstock. Listrik yang di hasilkan dari Generator Plengan di teruskan ke Gardu Induk dan di naikkan melalui Trafo daya 6/30 kV kemudian di salurkan ke Gardu Induk Lamajan.
2.2 Relay
Relay adalah saklar elektronik yang didasarkan atas elektrik dan mekanik. Kontrol elektrik diterapkan untuk mendapatkan gerakan mekanik. Ada banyak
16
Gambar 2. 11 Simbol relay [3]
1. Relay SPST (Single Pole SingleThrough )
Relay dengan satu induk saklar dengan satu saluran kontak (normally closed).
2. Relay DPST (Double Pole SingleThrough)
Sama seperti SPST tetapi mempunyai dua buah saklar terpisah yang bekerjanya serentak/bersamaan dan satu saluran kontak (normally closed) untuk tiap saklar.
3. Relay SPDT (Single Pole Double Through)
Merupakan relay yang mempunyai satu induk saklar untuk menghubungkan dua saluran kontak (normally closed dan normally open) yang dihubung bergantian.
4. Relay DPDT (Double Pole Double Through)
17 2.3 Transformator (Trafo)
Transformator (trafo) adalah alat yang digunakan untuk menaikan atau menurunkan tegangan bolak-balik (AC). Transformator terdiri dari 3 komponen pokok yaitu: kumparan pertama (primer) yang bertindak sebagai input, kumparan kedua (skunder) yang bertindak sebagai output, dan inti besi yang berfungsi untuk memperkuat medan magnet yang dihasilkan.
Prinsip kerja dari sebuah transformator adalah sebagai berikut, ketika kumparan primer dihubungkan dengan sumber tegangan bolak-balik, perubahan
arus listrik pada kumparan primer menimbulkan medan magnet yang berubah. Medan magnet yang berubah diperkuat oleh adanya inti besi dan dihantarkan inti besi ke kumparan sekunder, sehingga pada ujung-ujung kumparan sekunder akan timbul ggl induksi. Efek ini dinamakan induktansi timbal-balik [3].
Gambar 2. 12 Hubungan kumparan primer dan sekunder trafo [3]
Hubungan antara tegangan primer, jumlah lilitan primer, tegangan sekunder, dan jumlah lilitan sekunder, dapat dinyatakan dalam persamaan :
18 Keterangan :
Vp : Tegangan primer (volt) Vs : Tegangan sekunder (volt) Np : Jumlah lilitan primer Ns : Jumlah lilitan sekunder
2.4 Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer lengkap dalam satu chip.
19
Gambar 2. 13 Konfigurasi pin ATmega16 [12]
2.4.1. Arsitektur ATmega16
Mikrokontroler ini menggunakan arsitektur Harvard yang memisahkan
memori program dari memori data, baik bus alamat maupun bus data, sehingga pengaksesan program dan data dapat dilakukan secara bersamaan (concurrent), adapun blog diagram arsitektur ATMega16. Secara garis besar mikrokontroler ATMega16 terdiri dari :
1) Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16 Mhz.
2) Memiliki kapasitas Flash memori 16Kbyte, EEPROM 512 Byte, dan SRAM 1 Kbyte.
3) Saluran I/O 32 buah, yaitu Port A, Port B, Port C, dan Port D. 4) CPU yang terdiri dari 32 buah register.
5) User interupsi internal dan eksternal.
6) Port antarmuka SPI dan Port USART sebagai komunikasi serial. 7) Fitur Peripheral.
Dua buah 8-bit timer/counter dengan prescaler terpisah dan mode
compare.
20 dan mode capture.
Real time counter dengan osilator tersendiri
Empat kanal PWM dan Antarmuka komparator analog.
8 kanal, 10 bit ADC.
Byte-oriented Two-wire Serial Interface.
Watchdog timer dengan osilator internal.
21 2.4.2. ADC (Analog to Digital Converter)
Sebagaian besar data yang ada di dunia ini merupakan data analog, misalnya: temperatur, tekanan, tegangan listrik dll. Sebagai contoh temperatur di dalam boiler sebesar 800 0C, saat boiler dinyalakan, temperatur tersebut tidak akan langsung menunjukkan angka 800 0C, tetapi akan naik secara bertahap dari
temperatur normal, 400 0C, 500 0C hingga mencapai 800 0C.
Data analog yang ada akan diproses menggunakan sebuah sinyal prosessing, sebagai input sinyal analog, akan tetapi pemrosesan sinyal analog, kurang efiisien
dikarenakan akurasi nya relatif kecil, error yang cukup besar dan kecepatan pemrosesan sendiri yang relatif lambat. Sehingga data analog yang hendak diproses perlu diubah ke data bentuk digital menggunakan Analog to Digital Converter (ADC) [6].
Gambar 2. 15 Proses pengakuisisian sinyal [6]
22
mengubah besaran fisis menjadi besaran elektrik yang dapat berupa tegangan, arus atau hambatan [6]. Sehingga besaran fisis yang di-sensing akan diubah menjadi besaran elektrik yang masih merupakan sinyal analog. Tahap kedua adalah tahap konversi sinyal analog menjadi sinyal digital dengan menggunakan Analog to Digital Converter (ADC), sehingga dihasilkan sinyal digital, pada tahap ketiga sinyal digital tersebut kemudian menjadi input pada komponen pemrosesan sinyal, dimana komponen yang sering digunakan sebagai pemrosesan sinyal adalah mikrokontroler (MCU).
Pada mikrokontroler keluarga AVR seri ATMEGA 8/16/32/8535, fitur ADC sudah build in di dalam chip. Fitur internal ADC inilah yang menjadi salah satu kelebihan mikrokontroler ini jika dibandingan dengan beberapa jenis mikrokontroler lainnya, sehingga tidak perlu menggunakan rangkaian ADC eksternal tambahan. Atmega memiliki resolusi ADC 10 bit yang berarti nilai ADC memiliki rentang nilai 2 pangkat 10 (210) = 1024. Hal tersebut artinya ADC akan memiliki rentang nilai antara 0 hingga 1024. Selain itu, resolusi ADC juga dapat menggunakan ADC 8 bit dan Jika ADC 8 bit, maka nilai ADC nya adalah 28.
Dengan 8 channel (PA0 – PA7), rangkaian internal ADC memiliki catu daya tersendiri yaitu pin AVCC. Dimana fitur lebih lengkapnya dapat dilihat pada gambar berikut :
10 – bit Resolution
5 LSB Integral Non-Liniearity ± 2 LSB Absolute Accuracy 13 – 260 µs Conversion Time
Up to 15 kSPS at maximum Resolution 8 Multiplexed Single Ended Input Channels
7 Differential Input Channels with Optional Gain of 10x and 200x
Optional left adjustment for ADC result Readout 0 – Vcc ADC input Voltage Range
23
ADC Start Conversion by Auto triggering on Interrupt Sources Interrupt on ADC Conversion Complete
Sleep Mode Noise Canceler
Rumus konversi nilai sinyal analog menjadi besarnya tegangan dengan nilai ADC adalah sebagai berikut :
... (2.8)
Pada rumus di atas, System voltage merupakan besarnya tegangan input ADC atau AVCC. Sebagai contoh, jika sistem kita menggunakan tegangan 5 V, menggunakan resolusi ADC 10 bit dan tegangan analog sebesar 2,12 V, maka berapakah nilai ADC ?
2.5 BASCOM AVR
24
BASCOM AVR sendiri adalah salah satu tool untuk pengembangan / pembuatan program untuk kemudian ditanamkan dan dijalankan pada mikrokontroler terutama mikrokontroler keluarga AVR. BASCOM AVR juga bisa disebut sebagai IDE (Integrated Development Environment) yaitu lingkungan kerja yang terintegrasi, karena disamping tugas utamanya meng-compile kode program menjadi file hex / bahasa mesin, BASCOM AVR juga memiliki kemampuan / fitur lain yang berguna sekali seperti monitoring komunikasi serial dan untuk menanamkan program yang sudah di compile ke mikrokontroler.
BASCOM AVR menyediakan pilihan yang dapat mensimulasikan program. Program simulasi ini bertujuan untuk menguji suatu aplikasi yang dibuat dengan pergerakan LED yang ada pada layar simulasi dan dapat juga langsung dilihat pada LCD, jika kita membuat aplikasi yang berhubungan dengan LCD. Intruksi yang dapat digunakan pada editor BASCOM AVR relatif cukup banyak dan tergantung dari tipe dan jenis AVR yang digunakan.
Gambar 2. 16 Aplikasi BASCOM AVR
2.6 Logika Fuzzy
25
diekspresikan dalam istilah biner (0 atau 1, hitam atau putih, ya atau tidak), logika fuzzy menggantikan kebenaran boolean dengan tingkat kebenaran.
Logika Fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat keabuan dan juga hitam dan putih, dan dalam bentuk linguistik, konsep tidak pasti seperti "sedikit", "lumayan", dan "sangat". Dia berhubungan dengan set fuzzy dan teori kemungkinan. Fuzzy diperkenalkan oleh Dr. Lotfi Zadeh dari Universitas California, Berkeley pada 1965.
Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang
input ke dalam suatu ruang.
Gambar 2. 17 Prinsip Kerja Logika Fuzzy [2]
2.6.1. Himpunan Fuzzy
26
Contoh dari himpunan variabel bahasa antara lain :
Himpunan suhu atau temperatur dapat dinyatakan dengan dingin, sejuk, normal, hangat, dan panas.Grafik dari himpunan suhu ini ditunjukkan pada ganbar ini.
Gambar 2. 18 Contoh keanggotaan himpunan temperatur atau suhu [2]
Himpunan umur dapat dinyatakan dengan muda, parobaya, tua, dan sangat tua.Grafik dari himpunan umur ini ditunjukan pada gambar ini.
Gambar 2. 19 Contoh keanggotaan himpunan umur [2]
Himpunan dari kecepatan dapat dinyatakan dengan lambat, normal, cepat,
27
Gambar 2. 20 Contoh keanggotaan himpunan kecepatan [2]
Dalam sistem kontrol logika fuzzy terdapat beberapa tahapan operasional meliputi:
1. Fuzzifikasi.
2. Mesin penalaran atau inference engine. 3. Aturan dasar (fuzzy rule).
4. Defuzzifikasi.
Blok diagram kontrol logika fuzzy ditunjukkan pada gambar
Gambar 2. 21 Blok Diagram Kontrol Logika Fuzzy [2]
28
Gambar 2. 22 Kerangka kerja kontrol logika fuzzy [2]
Dari gambar 2.22 sinyal masukan dari kontrol logika fuzzy dapat berupa nilai tegas. Sinyal masukan kontrol logika fuzzy dapat diambilkan dari.
1. Selisih antara nilai rujukan (reference) dengan nilai keluaran nyata dari kontrol logika fuzzy yang berupa nilai kesalahan (error = E).
2. Turunan pertama dari nilai error yang dikenal dengan delta error = dE
2.6.2. Fuzzifikasi
Fuzzifikasi yaitu suatu proses untuk mengubah suatu masukan dari bentuk tegas (crisp) menjadi fuzzy (variabel linguistik) yang biasanya disajikan dalam bentuk himpunan-himpunan fuzzy dengan suatu fungsi kenggotaannya masing-masing. Contoh dari proses Fuzzification adalah seperti yang ditunjukkan di gambar 2.23. Sebuah sistem fuzzy untuk mengukur suhu mempunyai 5 buah
membership function yang mempunyai label sangat dingin, dingin, hangat, panas, sangat panas. Kemudian input yang diperoleh dari crisp input adalah 47° C maka
29
Gambar 2. 23 Proses perubahan dari crisp/nilai tegas menjadi fuzzy input [2]
Sehingga didapat 2 fuzzy input yang masing-masing adalah: dingin (x2) dan hangat (x1). Nilai x1 dan x2 dapat dicari dengan rumus persamaan garis.Yang menentukan sistem anda sensitif atau tidak adalah membership function ini. Jika
membership function-nya banyak maka sistem anda menjadi sensitif. Yang dimaksud dengan sensitif dalam hal ini adalah jika input-nya berubah sedikit saja maka sistem akan cepat merespon dan menghasilkan suatu output lain. Output dari proses fuzzification ini adalah sebuah nilai input fuzzy atau yang biasanya
dinamakan fuzzy input.
2.6.3. Aturan Dasar Logika Fuzzy
Aturan dasar atau rule base pada kontrol logika fuzzy merupakan suatu bentuk aturan relasi/implikasi “Jika-Maka” atau “If-Then” seperti pada pernyataan berikut:
“JIKA” X = A dan “JIKA” Y = B “MAKA” Z = C ... (2.9)
Contoh dari aturan jika-maka ini pada pengendalian suhu ruangan dengan pengaturan kecepatan kipas angin melalui frekuensi variabel adalah sebagai berikut :
1. “JIKA” suhu panas dan
30
3. “MAKA” sumber frekuensi dinaikkan sangat tinggi agar kecepatan kipas tinggi.
Jadi aturan dasar kontrol logika fuzzy ditentukan dengan bantuan seorang pakar yang mengetahui karakteristik objek yang akan dikendalikan. Aturan dasar tersebut dapat dinyatakan dalam bentuk matrik aturan dasar kontrol logika fuzzy. Contoh aturan dasar pengaturan suhu ruangan dapat dilihat pada tabel berikut.
Tabel 2. 1 Contoh matrik aturan dasar perancangan kontrol logika fuzzy [2]
x/y B S K
B K K B
S K S K
K B K B
Dimana,
X= Suhu, Y= Kecepatan Kipas.
2.6.4. Mesin Penalaran Kontrol Logika Fuzzy (Inference Engine)
Mesin penalaran (Inference Engine) adalah proses implikasi dalam menalar nilai masukan guna penentuan nilai keluar sebagai bentuk pengambil keputusan. Salah satu model penalaran max-min. Dalam penalaran max-min proses pertama yang dilakukan adalah melakukan operasi operasi min sinyal keluaran lapisan fuzzifikasi, yang diteruskan dengan operasi max untuk mencari nilai keluaran yang selanjutnya akan difuzzifikasikan sebagai bentuk keluaran pengontrol. Operasional max-min tersebut dinyatakan sebagai berikut :
1. Operasi min (irisan) a∩ b = min (a,b) = a if ≤ b 2. Operasi max (union)
a U b = max (a,b) = a if
31
Gambar 2. 24 Operasi max-min secara grafis [2]
2.6.5. Defuzzifikasi
Defuzzifikasi merupakan proses pemetaan himpunan fuzzy kemampuan tegas (crisp) proses ini merupakan kebalikan dari proses fuzzifikasi.
Metode dalam defuzzifikasi antara lain :
a. Metode Max
Solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum aturan, kemudian menggunakannya untuk memodifikasi daerah fuzzy, dan mengaplikasikannya ke output dengan menggunakan operator OR (union). Secara
umum dapat dituliskan :
32 b. Metode Additive (Sum)
Solusi himpunan fuzzy diperoleh dengan cara melakukan bounded sum terhadap semua output daerah fuzzy. Secara umum dapat dituliskan :
μsf[xi] = min ( 1,μsf[xi] + μkf [xi] ) ... (2.11)
c. Metode Probabilistik OR (probor)
Solusi himpunan fuzzy diperoleh dengan cara melakukan product terhadap semua output daerah fuzzy. Secara umum dapat dituliskan :
μsf [xi] = ( μsf[xi] + μkf [xi]) - (μsf [xi] * μkf [xi] ) ... (2.12)
Keterangan :
μsf [xi] : nilai keanggotaan solusi fuzzy sampai aturan ke-i
μkf [xi] : nilai keanggotaan konsekuen aturan ke-i
2.6.6. Metode Fuzzy Mamdani
Metode Mamdani sering juga dikenal dengan nama Metode Max-Min. Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. Untuk mendapatkan output, diperlukan 4 tahapan :
1. Pembentukan himpunan fuzzy 2. Aplikasi fungsi implikasi (aturan) 3. Komposisi aturan
4. Penegasan (deffuzy)
2.6.7. Metode Fuzzy Sugeno
33
mempunyai sebuah nilai dan 0 di luar titik tersebut. Ada 2 model fuzzy dengan metode Sugeno yaitu sebagai berikut :
a. Model Fuzzy Sugeno Orde-Nol
Secara umum bentuk model fuzzy Sugeno Orde Nol adalah:
IF (x1 is A1) o (x2 is A2) o (x3 is A3) o… o (xN is AN) THEN z=k ... (2.13)
Dengan Ai adalah himpunan fuzzy ke-I sebagai antesenden, dan k adalah suatu konstanta (tegas) sebagai konsekuen.
b. Model Fuzzy Sugeno Orde-Satu
Secara umum bentuk model fuzzy Sugeno Orde-Satu adalah :
IF (x1 is A1) o… o (xNis AN) THEN z = p1*x1+… + pN*xN+q ... (2.14)
Dengan Ai adalah himpunan fuzzy ke-i sebagai antesenden, dan pi adalah suatu konstanta (tegas) ke-i dan q juga merupakan konstanta dalam konsekuen.
2.6.8. Metode Fuzzy Tsukamoto
Metode Tsukamoto merupakan salah satu metode yang dimiliki oleh logika fuzzy selain daripada metode sugeno dan metode mamdani. Pada metode Tsukamoto, setiap aturan direpresentasikan menggunakan himpunan-himpunan fuzzy, dengan fungsi keanggotaan yang monoton pada hasilnya. Untuk menentukan nilai output crisp/hasil yang tegas (Z) dicari dengan cara mengubah input (berupa himpunan fuzzy yang diperoleh dari komposisi aturan-aturan fuzzy) menjadi suatu bilangan pada domain himpunan fuzzy tersebut. Cara ini disebut dengan metode defuzzifikasi (penegasan). Metode defuzzifikasi yang digunakan dalam metode Tsukamoto adalah metode defuzzifikasi rata-rata terpusat (Center Average Defuzzyfier) [11].
34
(penalaran) dari tiap-tiap aturan diberikan secara tegas (crisp) berdasarkan α -predikat (fire strength). Hasil akhirnya diperoleh dengan menggunakan rata-rata terbobot.
Ada 2 var input: var-1 (x), dan var-2 (y); serta 1 var output: var-3 (z). Dimana var-1 terbagi atas himpunan A1 & A2; var-2 terbagi atas himpunan B1 & B2; var-3 terbagi atas himpunan C1 & C2 (C1 dan C2 harus monoton). Arti monoton adalah satu saja. Hasil yang diperoleh dari perhitungan logika fuzzy hanya ada satu. Jika hasilnya banyak maka akan di hitung dengan cara dibagi rata
hingga diperoleh hasil output (z).
Gambar 2. 25 Grafik Metode Fuzzy Tsukamoto [11]
35 BAB III
METODE PENELITIAN
3.1 Studi Literatur
Studi Literatur dilaksanakan dengan cara mencari referensi yang berkaitan dengan perancangan maupun aplikasi dari Automatic Transfer Switch. Sudah banyak pembuatan Automatic Transfer Switch dari daya PLN ke Genset, akan tetapi mahalnya peralatan yang digunakan dan banyak yang menggunakan peralatan kendali konvensional membuat para engineer bidang elektro kesulitan dalam pengaplikasiannya. Adapun penelitian yang pernah dibuat mengenai ATS diantaranya ialah Eko Susanto (2013), Judul penelitian ini adalah “Automatic Transfer Switch (Suatu Tinjauan)” dalam penelitian ini dibahas pembuatan ATS dengan merangkaikan beberapa alat seperti Relay, Timer, Kontaktor, dan MCB. Alat – alat tersebut pada prinsipnya adalah sebagai sakelar ataupun pemutus hubungan.
Dalam tinjauan pustaka yang ditemukan, peneliti masih menggunakan relay
-relay konvensional dalam membuat Automatic Transfer Switch. Oleh karena itu,
Automatic Transfer Switch yang akan dibuat pada penelitian ini menggunakan Mikrokontroller.
3.2 Observasi Lapangan
36
Didapat data dari bidang operasi bahwa telah terjadi kerugian kWh dari tidak beroperasinya Unit pembanngkit akibat dari hilangnya tegangan sistem 30 kV selama 13 jam pada tanggal 13 Desember 2015 sebesar 89.375 kWh.
Tabel 3. 1 Data kerugian kWh PLTA Plengan tanggal 13 Desember 2015 [9]
I II III IV V JML I II III IV V I II III IV V
SUB TTL 0 0 824 0 0 8,640 8,640 8,640 16,200 12,880 55,000
15:00 ST 1.00 1.00 ST ST 2.00 0 997 997 0 0 0 0 0 0 0
TOTAL 0 9,965 10,790 8,018 0 14,040 14,040 14,040 26,325 20,930
JAM
MW KWH
PLTA PLENGAN PLTA PLENGAN
PLENGAN
Dari hasil Observasi tersebut, maka perlu dibuat Switching otomatis dari Genset ke PLN.
3.3 Diskusi
37
Start yang ada di PLTA Saguling untuk dapat dimplementasikan di PLTA Plengan.
Diskusi dengan Dosen Pembimbing ialah diskusi mengenai konsep, perancangan dan analisis dari Automatic Transfer Switch.
3.4 Perancangan ATS
Perancangan ATS dilakukan secara perhitungan matematis berdasarkan materi dan referensi yang diperoleh dari hasil studi pustaka. Perancangan meliputi semua aspek yang menunjang kerja sistem baik dari segi perangkat keras komponen elektrik (hardware) maupun perangkat lunak (software). Langkah pertama adalah merancang cara kerja sistem modul ATS. ATS ini dirancang untuk melakukan
switching dari sumber listrik PLN ke Genset dan sebaliknya yang dikondisikan oleh kontroler dan disempurnakan respon sistemnya menggunakan Logika Fuzzy.
MIKROKONTROLER RELAI
38
Gambar 3. 2 Blok Diagram ATS Secara Rinci
Langkah berikutnya menentukan komponen elektrik yang akan digunakan pada ATS serta merangkai komponen-komponen tersebut sesuai perancangan ATS. Pengendalian ATS dilakukan dengan menggunakan Mikrokontroler yang diprogram sesuai dengan perancangan kondisi ATS. Diagram alir penelitian Rancang bangun ATS ini ialah :
MULAI
39
Perancangan meliputi identifikasi sistem dari ATS yang ada di PLTA Saguling sebagai referensi yang akan diterapkan di ATS PLTA Plengan. Pemrograman dibuat pada aplikasi Basic Compiler dan di simulasikan pada aplikasi Proteus versi 8.4. Kemudian dilakukan pengujian ATS berdasarkan Rule yang telah dibuat sesuai dengan Tabel 3.2. Jika ATS sudah relevan denga Rule, maka ATS selesai dibuat. Jika belum relevan maka dilakukan pemrograman ulang.
WARNING SWITCH START IGNITION
NORMAL SWITCH START -
3.5 Pembuatan ATS
Dalam hal ini dibuat Prototype ATS yang mendekati kinerja ATS yang sebenarnya dengan disempurnakan Respon sistemnya menggunakan Logika Fuzzy.
3.5.1. Komponen-komponen yang digunakan dalam pembuatan prototype ATS
1. Catu daya
40
Gambar 2. 26 Catu Daya Unit
2. Mikrokontroler ATmega16
Mikrokontroler ATmega16 digunakan dalam pembuatan ATS ini. Dengan memanfaatkan ADC yang ada sebagai penerima sinyal analog +5 VDC dan
sebagai Sensor Tegangan.
Gambar 3. 4 Mikrokontroler ATMega16
3. LCD
41
didesain khusus untuk mengendalikan LCD. Mikrokontroller HD44780 buatan hitachi yang berfungsi sebagai pengendali LCD ini memepunyai CGROM (Character Generator ROM) untuk 192 tipe karakter, CGRAM (Character Generator RAM) dan DDRAM (Display Data RAM). LCD ini mempunyai keunggulan antara lain adanya panel pengatur kekontrasan cahaya tampilan LCD, tampilan terdiri dari 2 baris yang masing-masing terdiri 16 karakter, selain itu LCD ini membutuhkan konsumsi daya yang rendah.
Gambar 2. 27 LCD Display 16x2 M1632
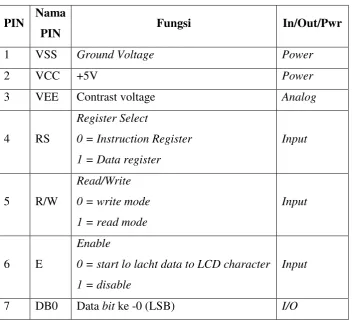
Tabel 3. 3 Identifikasi PIN LCD Display 16 x 2 M1632
PIN Nama
PIN Fungsi In/Out/Pwr
1 VSS Ground Voltage Power
2 VCC +5V Power
3 VEE Contrast voltage Analog
4 RS
0 = start lo lacht data to LCD character
1 = disable
Input
42
8 DB1 Data bit ke-1 I/O
9 DB2 Data bit ke-2 I/O
10 DB3 Data bit ke-3 I/O
11 DB4 Data bit ke-4 I/O
12 DB5 Data bit ke-5 I/O
13 DB6 Data bit ke-6 I/O
14 DB7 Data bit ke-7 (MBS) I/O
15 BPL Back Plane Light Power
16 GND Ground Voltage Power
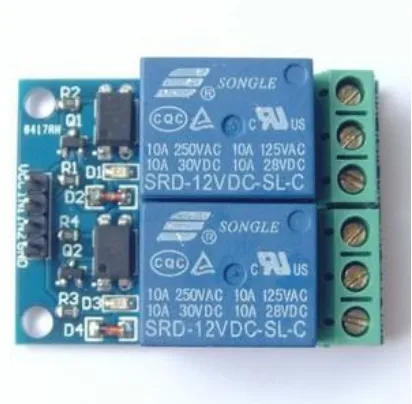
4. Relai 5 VDC
Relai 5 VDC digunakan sebagai output dari Mikrokontroller, karena output Mikrokontroler hanya sampai 5 VDC.
Gambar 3. 5 Relai 5 VDC Merk Songle
5. Motor 5 VDC
43
Gambar 3. 6 Motor 5 VDC
6. Potensio 1 KΩ
Potensio (POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensio merupakan Keluarga Resistor yang tergolong dalam Kategori Variabel Resistor. Secara struktur, Potensio terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya.
Potensio disini digunakan sebagai adjust tegangan dari suplai 5 VDC ke ADC Mikrokontroller sebagai simulasi naik-turun Tegangan dan Frekuensi.
44 3.6 Pembuatan ATS secara Software
3.6.1. Pembuatan Rangkaian di Proteus versi 8.4
PB0/T0/XCK
Gambar 3. 8 Rangkaian ATS
Pada aplikasi Proteus 8.4 dan aplikasi di lapangan, Mikrokontroler yang digunakan adalah Mikrokontroler ATmega16. Tegangan dari jala-jala 220 VAC Power Suplai Unit menjadi 5 VDC yang digunakan sebagai Suplai Mikrokontroler dan input ADC. ADC pada Mikrokontroler digunakan sebagai input tegangan dan frekuensi sebagai Anggota himpunan pada Rule Logika Fuzzy yang digunakan pada ATS.
Input berupa anggota himpunan tegangan dan frekuensi dari Power Suplai 5 VDC pada Mikrokontroler dikonversi melalui bahasa pemrograman menjadi
0-30 kV untuk tegangan dan 0 - 51,5 Hz untuk Frekuensi yang disesuaikan dengan kondisi di PLTA Plengan. Tegangan yang masuk ke Mikrokontroler diatur besarannya oleh Potensio dengan rasio 5 kΩ untuk mengatur naik dan turunnya tegangan dan frekuensi untuk simulasi kinerja ATS.
45 3.6.2. Pembuatan script Program ATS
START
46 3.7 Prinsip Kerja ATS
1. Sumber listrik yang digunakan untuk mengoperasikan Motor Inlet Valve dan Governor berasal dari dua sumber listrik, yakni sumber PLN sebagai sumber listrik primer dan Genset sebagai sumber listrik sekunder.
2. Sensor Tegangan dari ADC dari Mikrokontroler sebagai pendeteksi ada atau tidak adanya tegangan pada sumber listrik PLN, menerima tegangan 220 VAC kemudian diturunkan oleh Power Supply Unit menjadi +5 VDC yang merepresentasikan sinyal masukan utama ke mikrokontroler ATmega16.
3. Sensor Frekuensi yang berasal dari Power Supply +5 VDC yang merepresentasikan sinyal masukan utama ke ADC Mikrokontroler ATmega16.
4. Mikrokontroler ATmega16 sebagai pengolah data menerima masukan tegangan dari Power Supply Unit menuju ke Analog Digital Converter (ADC) pada Mikrokontroller melakukan perhitungan internal berupa logika digital sebagai bentuk sinyal pemicu ke Relai.
5. Input Frekuensi masuk ke Port Analog Digital Converter (ADC) pada Mikrokontroller melakukan perhitungan konversi menjadi Input Frekuensi.
6. Untuk kinerja logika Relai Genset dan Relai PLN maka dibuat Logika Fuzzy metode Mamdani pada aplikasi Matlab dengan Rule sesuai dengan tabel Rule
3.2.
7. Pada Perancangan ATS, untuk Genset akan dibuat 4 Relai yaitu Relai Ignition untuk pengapian Genset, Relai Start/Genset untuk mengoperasikan Genset, Relai Switch untuk switching dari daya PLN ke Genset dan Relai PLN untuk
switch daya Genset ke PLN.
3.7.1. Pembuatan Logika Fuzzy untuk ATS di MATLAB
47
Frekuensi, dan Output yang berupa kinerja kontak Relai Genset dan Switch yang terdiri dari Ignition, Start, Switch.
Ignition merupakan pengapian awal dari Genset, Start merupakan Operasi dari Genset (Genset beroperasi mengeluarkan tegangan), dan Switch merupakan
switching daya dari daya PLN ke Genset.
Gambar 3. 10 FIS Editor ATS
Input dari ATS berupa Tegangan dan Frekuensi, pada MATLAB output dinamakan dengan “Operasi_Genset”. Metode Mamdani digunakan pada Logika Fuzzy ini dengan anggota himpunan tegangan dan frekuensi dengan niali-nilai
yang telah ditentukan.
1. Variabel Tegangan
48
Anggota himpunan tegangan menggunakan bentuk Trapesium dengan besaran yang diadaptasi dari status tegangan di PLTA Saguling. Terdapat 3 variabel range tegangan, yaitu Low, Warning dan Normal dengan range :
Low : 0 – 7 kV Warning : 7 – 27 kV Normal : 27- 30 kV
2. Variabel Frekuensi
Gambar 3. 12 Variabel Frekuensi
Anggota himpunan frekuensi menggunakan bentuk Trapesium dengan besaran yang diadaptasi dari status frekuensi di PLTA Saguling. Terdapat 3 variabel range frekuensi yang sama dengan tegangan, yaitu Low, Warning dan Normal dengan range :
49 3. Variabel Output
Gambar 3. 13 Variabel Output
Anggota himpunan Output dibuat 3 variabel sesuai dengan output yang diinginkan, yaitu Ignition, Start dan Switch dengan range :
Ignition : 0 - 1 Start : 1 - 3 Switch : 3 – 5
Gambar 3. 14 Rule Editor
50
pemrograman dapat dibuat sesuai dengan kondisi yang ada telah dibuat pada aplikasi MATLAB.
Gambar 3. 15 Rule Viewer ATS
Pada Rule Viewer di MATLAB dapat dimasukkan nilai tegangan dan frekuensi. Output pun terlihat hasilnya sesuai dengan variable yang ada.
Gambar 3. 16 Surface ATS
51 BAB IV
HASIL DAN PEMBAHASAN
4.1 Analisa Respon Waktu di Aplikasi Proteus 8.4
Analisis ini dilakukan sebagai tolak ukur awal keberhasilan dari alat yang dibuat, agar mengetahui bagaimana respon sistem berdasarkan waktu yang diukur oleh Digital Osiloskop. Pada Gambar rangkaian ATS tidak digunakan Dioda Bridge seperti pada rangkaian sebenarnya, karena Dioda Bridge pada aplikasi ini tidak dapat di simulasikan. Oleh Karena itu, hanya digunakan 2 Dioda Half wave.
Tabel 4. 1 Rule Fuzzy ATS
TEGANGAN
LOW WARNING NORMAL
FREKUENSI
LOW SWITCH SWITCH SWITCH
WARNING SWITCH START IGNITION
NORMAL SWITCH START -
Pada percobaan kali ini dibuat aksi 3 kondisi dari kinerja ATS diantaranya ialah saat Genset Ignition, saat Genset Start dan saat Switch.
Keterangan Channel Osiloskop pada aplikasi Proteus 8.4 :
Channel A : Ignition
Channel B : Genset
Channel C : Switch
52
4.1.1. Kondisi Tegangan Jala-jala 30 kV Normal
Gambar 4. 1 Rangkaian ATS Mikrokontroler kondisi tegangan jala-jala normal
Gambar 4. 2 Tampilan Osiloskop Rangkaian ATS
53
4.1.2. Kondisi saat Tegangan Jala-jala di Range Normal dan Frekuensi di
RangeWarning
Jika Tegangan “Normal” (Range 27 – 30 kV) dan Frekuensi “Warning” (Range 47,5 – 49 Hz) maka posisi Genset “Ignition”. Hal ini dilakukan agar Genset melakukan pengapian lebih awal dengan memanfaatkan waktu turunnya Tegangan atau Frekuensi agar mempercepat respon sistem ATS.
54
Gambar 4. 4Tampilan Osiloskop saat tegangan Relai PLN di ATS hilang
55
Dari hasil pengukuran yang ditampilkan pada Osiloskop pada detik ke 1,55 Frekuensi sistem 30 kV turun menjadi status “Warning” pada 48,53 Hz, sedangkan tegangan sistem masih normal di 27 kV. Pada waktu yang sama yaitu 1,55 detik, Relai Ignition Genset ON ditandai pada kursor adanya tegangan Output dari Mikrokontroler sebesar 4,50 VDC pada Channel A di Osiloskop.
4.1.3. Kondisi saat Tegangan Jala-jala di Range Warning dan Frekuensi di
RangeWarning
Jika Tegangan “Warning” (Range 7 – 27 kV) dan Frekuensi “Warning” (Range 47,5 – 49 Hz) maka posisi Genset “Start”.
56
Gambar 4. 7 Tampilan Osiloskop saat Genset Start
Gambar 4. 8 Tampilan Osiloskop saat Relai Genset ON
57
switching yang dibuat di Logika Fuzzy Genset akan beroperasi dengan ditandai Relai Start ON pada 4,20 detik bersamaan dengan turunnya tegangan sistem 30 kV.
4.1.4. Kondisi saat Tegangan Jala-jala di Range Warning dan Frekuensi di
RangeWarning
Jika Tegangan “Low” (Range 0 –7 kV) dan Frekuensi “Warning” (Range < 47,5 Hz) maka posisi Switch ATS “Switch”.
58
Gambar 4. 10Tampilan Osiloskop saat Switch
Gambar 4. 11Tampilan Osiloskop saat Relai Switch
59
tersebut Relai “Switch” untuk switching daya dari PLN ke Genset akan beroperasi / ON pada waktu 7,98 detik.
Pada saat penormalan Tegangan dan Frekuensi maka Ignition, Start dan
Switch akan switching otomatis ke Relai PLN setelah Tegangan dan Frekuensi Normal.
4.2 Hasil Pengukuran
Gambar 4. 12 Foto Prototype ATS
Gambar 4. 13 Minimum Sistem Mikrokontroler ATmega16
60
Gambar 4. 14 Multimeter Merk Heles UX-837
Hasil pengukuran dilakukan ketika Relai bekerja / kontak dengan hasil sebagai berikut :
Tabel 4. 2 Hasil Pengukuran Tegangan kontak Relai ATS menggunakan Multimeter Merk Heles UX-837
Relai Kondisi
PLN ON Ignition Start Switch
R1 0 VDC 4,56 VDC 4,56 VDC 4,56 VDC
R2 0 VDC 0 VDC 4,56 VDC 4,56 VDC
R3 0 VDC 0 VDC 0 VDC 4,56 VDC
R4 4,56 VDC 4,56 VDC 4,56 VDC 0 VDC
Keterangan :
R1 = Relai 1 (Ignition) R2 = Relai 2 (Start) R3 = Relai 3 (Switch) R4 = Relai 4 (PLN ON)
61
Tabel 4. 3 Selisih waktu switching daya PLN ke Genset sebelum dan sesudah memakai ATS
NO Uraian kegiatan Manual (menit)
Gambar 4. 15 Grafik perbandingan switching otomatis dan manual
Jika diasumsikan PLTA Plengan mampu melakukan switching daya dari PLN ke Genset secara manual, maka akan memakan waktu 19 menit. Jika memakai ATS dengan Metode Logika Fuzzy, maka untuk switching daya dari PLN ke Genset hanya akan memakan waktu 0,60 menit.
62
Gambar 4. 16 Rule Viewer pengujian ATS kondisi PLN ON
Langkah selanjutnya untuk menguji kehandalan ATS ialah dengan mencocokkan antara kondisi output yang terjadi pada ATS dengan output pada defuzzifikasi Rule Viewer. Pada Rule Viewer di setting untuk outputnya ialah :
63
Gambar 4. 17 Prototype ATS Pengujian PLN ON
Pada prototype ATS terlihat bahwa lampu merah untuk indikasi PLN ON menyala pada saat di set pada tegangan sesuai dengan di Rule Viewer.
Gambar 4. 18Rule Viewer pengujian ATS kondisi Ignition
64 Tegangan : 28,7 kV
Frekuensi : 48,4 Hz Output : 0,5 (Ignition)
Gambar 4. 19Prototype ATS Pengujian Ignition
65 BAB V
SIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan yang didapat dari pembuatan ATS ini dapat diuraikan sebagai berikut :
1. Dengan adanya Automatic Transfer Switch maka direkomendasikan PLTA Plengan menggunakannya, agar dapat melakukan Asut Gelap / Black Start
tanpa adanya pasokan daya dari luar dengan memanfaatkan Genset yang ada. 2. Metode Logika Fuzzy yang digunakan dapat mempercepat switching daya dari
PLN ke Genset dengan waktu hanya 60 detik, lebih cepat dibandingkan
switching secara manual yaitu 19 menit.
3. Di sisi lain, apabila terjadi kerusakan pada Genset dan perangkatnya dapat dilakukan perbaikan ketika proses penurunan tegangan / frekuensi berlangsung sehingga dapat mengurangi rugi-rugi waktu akibat perbaikan Genset dan perangkatnya.
5.2 Saran
Saran yang didapat dari pembuatan ATS ini diuraikan sebagai berikut :
1. Untuk pembahasan selanjutnya, dapat dibahas mengenai analisa pengaruh pengaplikasian Automatic Transfer Switch dengan Metode Logika Fuzzy pada Jaringan 30 kV.
66
![Gambar 2. 1 Proses Bisnis PLTA [10]](https://thumb-ap.123doks.com/thumbv2/123dok/3992039.1935459/13.595.136.489.480.702/gambar-proses-bisnis-plta.webp)
![Gambar 2. 2 Prose Konversi Energi PLTA [10]](https://thumb-ap.123doks.com/thumbv2/123dok/3992039.1935459/15.595.135.480.117.426/gambar-prose-konversi-energi-plta.webp)
![Gambar 2. 9 Skema Jalur Transmisi Listrik [10]](https://thumb-ap.123doks.com/thumbv2/123dok/3992039.1935459/22.595.123.505.487.687/gambar-skema-jalur-transmisi-listrik.webp)
![Gambar 2. 14 Arsitektur Mikrokontroller [12]](https://thumb-ap.123doks.com/thumbv2/123dok/3992039.1935459/28.595.176.452.252.648/gambar-arsitektur-mikrokontroller.webp)
![Gambar 2. 15 Proses pengakuisisian sinyal [6]](https://thumb-ap.123doks.com/thumbv2/123dok/3992039.1935459/29.595.211.413.382.648/gambar-proses-pengakuisisian-sinyal.webp)